
Abstract
4D printing technology refers to the manufacturing of products using 3D printing techniques that are capable of changing shape or structure in response to external stimuli. Compared with traditional 3D printing, the additional dimension is manifested in the time dimension. Facilitated by the advancement of magnetic smart materials and 3D printing technology, magnetically controlled 4D printing technology has a wide range of application prospects in many fields such as medical treatment, electronic flexible devices, and industrial manufacturing. Magnetically controlled 4D printing technology is a new scientific research field in the 21st century, which includes but is not limited to the following disciplines: mechanics, materials, dynamics, physics, thermodynamics, and electromagnetism. It involves many fields and needs to be summarized systematically. First, this article introduces various magnetic intelligent materials, which are suitable for magnetically controlled 4D printing, and discusses their programmability. Second, regarding the printing process, the article introduces how to preset the material distribution as well as the research progress about the optimization of magnetically controlled 4D printing platforms and the distribution of magnetic field profiles. Third, the article also makes a brief introduction to the applications of magnetically controlled 4D printing technology in medical, electronic flexible devices, and industrial manufacturing fields.
Introduction
3
Meanwhile, intelligent devices with flexible and self-driving features have broad development prospects in the fields of biomedicine, aerospace, and electronic devices.5,6 Therefore, even though 3D printing technology is the best way to manufacture customized devices, its traditional printed products still cannot meet the manufacturing industry's demand for flexible and self-driving intelligent devices. The demand for smart devices has prompted researchers to apply smart materials, such as shape-memory polymers 7 and programmable materials, 8 to 3D printing technology. Moreover, the demand has led to the emergence of 4D printing in 2013. 9
4D printing technology is a special additive manufacturing process that adds a time dimension to the original three dimensions. It uses smart materials with special properties for 3D printing. By creating variable and controllable mechanical structures while merging the time dimension, the structures are endowed with the ability to deform as preset over time. There are many materials available for 4D printing, such as thermal-responsive materials,10,11 water-responsive materials, 12 magnetic-responsive materials,13–15 and ceramic materials. 16
The deformation of structures manufactured by 4D printing depends on the smart materials that are able to respond to environmental stimuli, and different materials that respond to different physical fields. The artificially provided physical fields include light, heat, pH, electric field, humidity, and magnetic field. 5 Many types of materials take long time to respond to stimuli, and are not suitable to be applied to situations that require rapid response to external stimuli and changes in structures and properties. For example, thermoresponsive hydrogels take a response time 10 times that of magnetic-responsive materials.13,17
The reason is that it requires a certain response time when some mechanical responses are caused by temperature changes or shape changes caused by the expansion mechanism of hydrogel materials. Materials of magnetically controlled 4D printing are composed of ordinary printing materials doped with magnetic particles. When these magnetic particles are driven by a magnetic force in a magnetic field, the overall structure deforms accordingly. So, the structures made from magnetic materials can follow the changes of magnetic field stimulation synchronously and have fast response characteristics of action.
Moreover, compared with other physical fields, magnetic field driving can be controlled in confined or enclosed spaces remotely, 18 and also can penetrate most materials and biological tissues more easily and harmlessly. 19 For example, the flexible magnetic-driven microrobots 20 are applied to drug release to the lesion precisely in vivo medical observation and minimally invasive surgery. These application requirements have driven experts and scholars to conduct in-depth research on magnetically controlled 4D printing technology. It can be observed that 3D printing technology has been infused with new vitality by 4D printing technology. 4D printing technology quickly and widely aroused great interest from experts in various fields once it emerged.
In addition, 4D printing technology is one of the fields of the 14th Five Year Plan, which is a development plan of the National Natural Science Foundation of China. Therefore, 4D printing technology is of great significance for national industrial development. This review, introducing magnetically controlled 4D printing technology to the field of 4D printing, will not only summarize the smart materials used in magnetically controlled 4D printing technology, the process of magnetically controlled 4D printing and its applications, but also discuss the status quo and future trends in magnetically controlled 4D printing.
Magnetic Intelligent Materials
4D printing combines additive manufacturing with deformable smart material, creating a new scientific research field. There are many materials suitable for magnetically controlled 4D printing, such as magnetic shape-memory alloys, 21 magnetic-responsive liquid crystal elastomers, 22 magnetic hydrogels,10,23 magnetic polylactic acid,24,25 and magnetic-responsive resins. 26 These various materials can be roughly divided into two major categories: nonprogrammable magnetic memory alloys and programmable materials. Before conducting magnetic 4D printing, it is of great significance to select suitable materials from various types. Therefore, this section mainly summarizes the use of magnetic memory alloys and programmable magnetic soft materials (MASMs) for magnetic 4D printing, as shown in Table 1.
Advantages and Future Challenges of Magnetically Controlled 4D Printing Composites
DBP, dibutyl phthalate; Fe3O4; MASM, magnetic soft materials; M-PULCE, magnetothermal-responsive polyurethane liquid crystal elastomer; MTSH, magnetic thermosensitive hydrogel; PDMS, polydimethylsiloxane; PLA, polylactic acid.
Magnetic shape-memory alloy
Magnetic shape-memory alloys (MSMAs) are intelligent materials that can deform in response to magnetic fields. It not only has the characteristics of traditional shape-memory alloys, which can respond to mechanical and thermal stimuli, 21 but also the characteristics of magnetostrictive materials, which can respond to changing magnetic fields. This is because MSMAs have both ferromagnetic and thermoelastic martensitic properties. 27 The deformation principle of this kind of material is the magnetic shape-memory effect that occurs in martensite. 28
When an external magnetic field is applied, the twin boundaries in the martensite are induced to move, resulting in macroscopic plastic deformation.28–31 The porosity of material in microstructure is the main factor that affects the deformation. The increase in porosity is beneficial to reducing grain boundary constraints, 32 which can promote grain boundary movement.
In the field of magnetically controlled 4D printing technology, the most commonly used magnetic memory alloy is Ni-Mn-Ga. Caputo and Solomon 15 explored a method to produce porous parts using liquid adhesives to melt porous polycrystalline Ni-Mn-Ga powder for jet printing. This printing method enables the product to achieve a higher porosity, up to 33.7%. Besides, the printed productions have a good magnetically induced strain, up to 8.7%. However, when the Ni-Mn-Ga powder was milled by balls, the magnetic properties of the material are always lost.
To solve this problem, Amir Mostafaei 33 further deepened his research on adhesive jet printing. And he proposed that the adhesive should be added during the process of jet printing, and the parts should be conducted post-treatment that sealed sintering in an argon atmosphere at 1020°C for 4 h. After treatment, the ferromagnetism of the ball-milled powder can be effectively restored, and the final saturation magnetization of the powder can reach 68.4 Am2/kg.
Based on the experiment published in 2017, Caputo et al 14 conducted comparative experiments. The experimental variables are different reaction environments, which introduced liquid nitrogen, liquid argon, and no introduction during the spark etching prealloying of Ni-Mn-Ga powder. Powder produced under these different conditions was sintered into parts and characterized. The study concluded that the porosity of the parts made of powder in the liquid nitrogen environment is the highest, reaching 70.43%.
Programmable magnetic soft materials
The parts made of magnetic memory shape alloy are limited to a single expansion and contraction after stimulation. But the emergence of programmable MASM has addressed this limitation. MASM parts have the capability to undergo multiple shape changes from their original shape to multiple preset shapes, triggered by a magnetic field. This allows for meeting various expected deformations, and offers versatility and adaptability. MASM enables the repeated alteration of functional structures, providing enhanced flexibility and versatility.
Zhu et al 34 developed a composite ink formed by violently mixing polydimethylsiloxane (PDMS) andiron particles. This ink has low remanence and low coercive force due to the presence of iron particles. For the same reason, the ink can improve its magnetic response behavior by changing the content of iron particles. Zhu also assumes that the composite ink can be combined with 3D terahertz photonic crystal devices to remotely tune by using external magnetic field stimulation. They expect to create new functions for magnetically controlled 4D printing products.
Kim et al 35 used the afore-mentioned ferrofluid composite ink to 4D print submillimeter wire-shaped magnetic control robots. In this research process, the volume fraction of NdFeB magnetic particles is 20% to exhibit better shear thinning performance and yield stress. Moreover, they proposed the possibility of replacing PDMS with thermoplastic polyurethane material according to different mechanical performance requirements of the printed products, so as to enable the printed products to exhibit a magnetothermal effect.
Zhang et al 3 introduced a new type of magnetic printing ink suitable for direct writing (DIW) printing. This ink comprises nonmagnetized hard-magnetic particles of rubidium-iron-boron, fumed silica, PDMS, and dibutyl phthalate (DBP).
Among them, nonmagnetized hard-magnetic particles of rubidium-iron-boron and PDMS contribute to strong hysteresis and good elasticity for new ink. Fumed silica and DBP are utilized to adjust for the rheological properties of the ink, which improve the structural properties of products printed by DIW. Hu et al 10 proposed a new intelligent hydrogel material for forming robots with magnetically controlled 4D printing technology. The team synthesized thermosensitive hydrogel (TSH) with N-isopropylacrylamide monomer and Laponite hydrogel nano clay with the shear thinning property that both are physical crosslinking agents. Magnetic TSH was prepared by doping Nd-Fe-B magnetic particles into TSH.
Zhang's team 24 used a composite filament made of polylactic acid solution and Fe3O4(PLA/Fe3O4) for 4D printing. The researchers demonstrated the shape-memory ability of the structure, and found that this composite filament has great application potential in the field of bone tissue restoration. Bodaghi and his colleagues 36 investigated the impact of various factors, including the relative positions of the printing wire angle and the magnetic field line angle, on the magnetic and mechanical properties of printed products using PLA/Fe3O4 as the printing material.
The experimental findings indicate that the highest saturation magnetization of the printed sample is attained when a magnetic field is applied parallel to the direction of sample deposition, and the printing angle is precisely aligned with the field lines at 0°. Compared with samples without a magnetic field, the saturation magnetization of the printed sample increased by 63.46%. Wu et al 37 proposed a magnetothermal-responsive polyurethane liquid crystal elastomer (M-PULCE).
The preparation method of M-PULCE is to disperse Fe3O4 nanoparticles into liquid crystals with exchangeable dynamic carbamate bonds. The material has unique characteristics of supercritical behavior, which make the produced parts through stepping controlled by a magnetic field. By applying light, heat, or magnetic fields to the material, different responses can be achieved. M-PULCE is a programmable material that allows for startup, motion erasure, and reprogramming.
As the quantity of magnetic particles in the material increases for M-PULCE, the required magnetic field strength correspondingly increases to attain the necessary temperature for product deformation. Therefore, by controlling the number of magnetic particles in different localized regions of the M-PULCE material and altering the distribution and intensity of the magnetic field, it is possible to program the angle, sequence, and even speed of actions occurring in the product. Due to the presence of a covalent adaptable network (CAN) within the LCE, when the magnetic field is removed and the temperature decreases, the CAN is influenced by the magnetic particles to restore disorder in the isotropic phase, allowing the LCE to return to its original polydomain state and achieve motion erasure.
The macroscopic manifestation of motion erasure is the restoration of the product to its premotion state. Regarding the reprogrammable feature, it is because the material contains dynamic urethane bonds. 38 This allows for the arbitrary cutting of product structures under a magnetic field and their assembly in another area through the magnetic field. This means that programmability is an inherent characteristic of this material. Similar to M-PULCE, dynamic magnetic-responsive thiol-acrylate composite materials 26 can also utilize the magnetothermal effect to activate dynamic bond-exchange reactions at high temperatures, enabling the formation of different structural combinations.
The material combines Fe3O4 magnetic nanoparticles with a photocurable resin. The magnetic nanoparticles have an average diameter of 50 nm, while the resin primarily consists of hydroxypropyl acrylate-2-phenoxyethyl acrylate and tripropylene glycol diacrylate. In the preparation process of materials, a monofunctional methacrylate phosphate is used as a stabilizer to enhance material stability. Organic phosphates are also used as ester exchange catalysts, imparting materials with ductility and assembly capability. Furthermore, this study introduced 3-mercaptopropionic acid as a thiol-crosslinking agent to modify the curing mechanism of pure methacrylate esters and promote the conversion of carbon double bonds within the material.
Printing Process Design
4D printing is a manufacturing technology that requires interdisciplinary integration. Therefore, the products of magnetically controlled 4D printing are not only affected by magnetic intelligent materials, but also supported by the type of printer, printing conditions, printing methods, and the programming contour of the magnetic field. Due to numerous influencing factors, it becomes extremely important to preset the results of printing, monitor the state of materials during the printing process, construction of magnetic field profiles, and simulate the structure of the product.
As a result, the printing process design is an essential part to explore magnetically controlled 4D printing technology. Thus, a thorough review is conducted on the optimization and design of magnetically controlled 4D printing, with the aim of providing an indispensable guide for future researchers delving into the manufacturing processes of magnetically controlled 4D printing.
Printing platform
Song et al 39 introduced an inkjet printing technology that can perform a magnetic alignment. In the process of DIW, they applied an external magnetic field to organize and arrange the sprayed magnetic particles in a unified direction. The products obtained in this case have higher magnetic permeability and lower hysteresis loss compared with the untreated products. Concentrating on the pen tips used in DIW printing, Robles' team 40 optimized the printing platform by microdistributing magnetic powder and specific substrate materials.
They concluded that the size of the printing pen tip used for printing should gradually increase in accordance with the microstructures of the magnetic powder, which is in the order of spherical flake and thin flake. And during the printing process, the pen tip should be moved and adjusted as close to 0 momenta as possible. To explore the optimal pressure distribution and speed in process of the DIW printing, Sun Yat-sen University 41 in China conducted a series of experiments in the research of 4D printing flexible grippers.
At the last, from the experiment, the optimal distribution pressure is 1100 kPa, and the appropriate printing speed is 5 mm/s. To make the material feed more continuously and smoothly, Cao et al 42 introduced spiral extrusion technology into the heating components of the melt deposition modeling (FDM) printer. They solved the problem of continuous feeding of low-modulus ultraflexible magnetic materials during the FDM printing process.
To produce higher precision products, researchers have developed a magnetic-assisted printing platform for 4D printing equipment. At the same time, these research studies have promoted the development of printing technology, which uses multinozzle printing multisoft materials simultaneously. 43 In 2015, Kokkinis 44 designed a magnetic-assisted 3D printing method. The orientation of magnetic material particles is controlled by a weak magnetic field, so that the printing route of the material can be planned.
The magnetic-assisted printing platform is equipped with four independently addressable injectors. And it has integrated the distributor of multimaterial with the two-component mixing unit. This method allows the printing platform to fill four different ratios of ink at once and change the material ratio of the ink during the printing process.
In 2017, Lu et al 45 proposed a magnetic-assisted projection stereolithography technology (M-PSL) that mixes magnetic particles and resin in situ layer by layer. They hope to reduce material aggregation and avoid nontarget patterns from appearing. The specific process is as follows: ferromagnetic particles are deposited in a liquid polymer by using a programmable deposition nozzle, and then an external magnetic field is applied to guide the magnetic particles to the target position to form the desired image, achieving local dispersion in the liquid photopolymer.
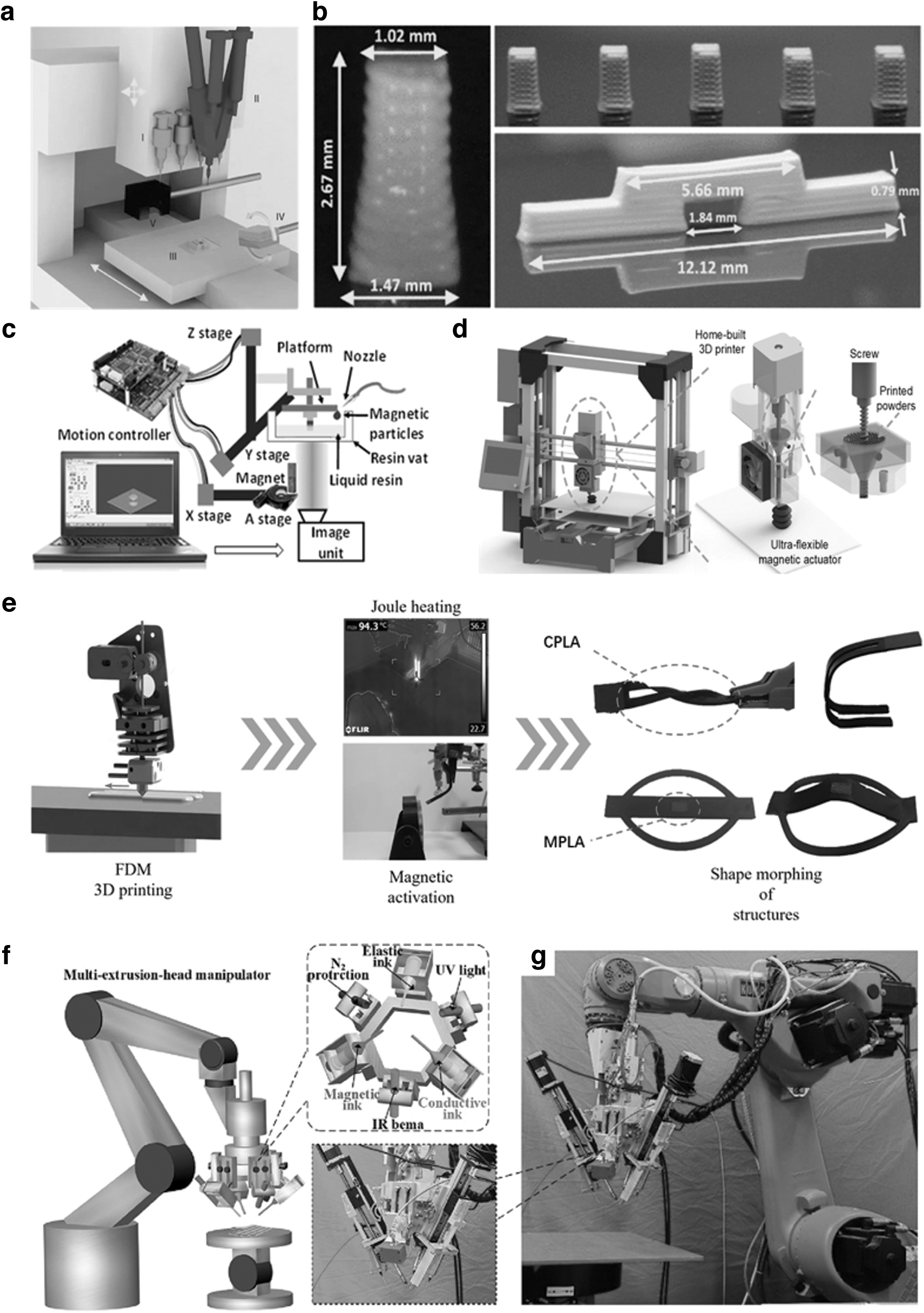
In 2023, Lalegani Dezaki 25 conducted a study on 4D printing of magnetoelectrically active shape-memory polymer composites using a customized FDM-type 3D printer equipped with two 0.4 mm nozzles. The printing process employed concentric infill to ensure internal continuity of the structure. Finally, through experimental verification involving the application and removal of magnetic and electric fields, the printed structure exhibited a shape recovery exceeding 93%. In the same year, Zhang et al 46 developed a homemade multiextrusion 3D printer with a mechanical arm. This printer is capable of simultaneously printing objects using a variety of different materials.
The materials used in this process include infrared-cured resin materials containing dysprosium-iron-boron, nitrogen-protected conductive liquid metal, and UV-cured elastic 50A resin. The printing extrusion structure comprises two main components: a multidegree-of-freedom robot serving as the motion platform and three sets of ink extrusion–curing systems. The six extrusion heads are evenly distributed on the robotic arm, with each pair of heads positioned opposite each other. Each pair corresponds to the extrusion and curing of a specific material mentioned above. Specifically, for the set of extrusion heads corresponding to the liquid conductive metal material, the “curing” extrusion head is equipped with a nitrogen gas delivery device to prevent oxidation of the conductive metal, as shown in Figure 1.
Material distribution
For structural optimization, a large part of research has focused on exploring the topological optimization of the structure. 47 And optimizing material distribution is a more specific branch of that. For the material distribution issue in 4D printing, experts use mathematical methods to optimize the material distribution in volume elements based on the possible load conditions of the given product, actual constraints, and future performance requirements. Topology optimization of printed products can find the optimal design solution that enables smart materials to be evenly distributed in space. 48 The main methods of topology optimization are homogenization method, 49 variable density-based method, 50 Evolutionary Structural Optimization method, 51 and level set method, as shown in Table 2. 52
Methods of Topology Optimization
Subramanian Sundaram's team 53 has designed a multimaterial on-demand 4D printing platform for multiobjective topology optimization. The researchers characterize the sample inks using magnetically controlled 4D printing and establish a characteristic database in the platform. The characteristic inks are combined with targeted functions to generate a material selection system for the platform. The platform uses a topology optimizer to specify the designated materials used in each voxel of the printed product. At the same time, it optimizes the structure to adapt to physical deflection and low-resolution appearance, achieving an optimization design from material to structure.
Geiss et al 54 have introduced a method for designing programmable 4D printing material layouts. The method is based on the assumption that materials undergo large deformations after being stimulated. According to the method, they created an active structure that can make the products achieve the desired displacement. This approach can accurately predict the nonlinear material layout. And the team also attempted to use level set methods and an extended finite element method, the density-based topology optimization, for material layout design. 55 It can be observed that this approach may involve the possibility of planning the printing path of magnetic intelligent programmable materials during the printing process.
Recently, Tian et al 56 proposed a method that combines the extended level set method with conformal geometric theory to design and optimize multimaterial ferromagnetic soft active structures. They applied M-PSL 45 in combination with 4D printing to manufacture a gripper. Testing showed that the stiffness of the redesigned gripper increased by 15.56% compared with that observed before optimization, and its carrying capacity has also correspondingly increased.
Zolfagharian et al 48 introduced the finite element method to topology optimization of printed product structures as a method for predicting the deformation behavior of printed products before manufacturing. Using this approach, the team studied issues related to optimizing material porosity. The experiment concluded that while keeping the constant volume fraction of the material, the porosity should be increased as much as possible. Their predictions of deformation and bending of the finished products were validated through experiments, demonstrating the accuracy of the method.
Huber 57 and the team proposed a topology optimization method for a permanent magnet system that generates a linear external magnetic field on a printed structure. Using this method, the structure built can maximize the field in a certain magnetization direction to save unnecessary loss of magnetic materials. The study also mentioned that the system can scan the magnetic field of a previous 3D-printed polymer-bonded magnet, and retopology the structure based on the scanning results. This technology holds great potential in advancing the refinement of magnetic control in 4D-printed products and maximizing the utilization of magnetic fields.
Magnetization profiles
The smooth process of magnetic control 4D printing depends on the coordination and unity of three aspects: the functionality of the printing platform, the appropriateness of the target product's structure design, and the rational construction of magnetization profiles. Initially, there was no standardized way to set the magnetic field for magnetic 4D printing. Researchers relied solely on their subjective intuition to set it up, which led to printed products with limited and imprecise response actions. Therefore, the rationality of magnetization profiles is crucial in ensuring that printed products accurately respond to external magnetic field stimulation and exhibit the desired movements.
Lum et al 58 proposed a method for automatically generating magnetization profiles and driving fields, which can achieve the desired time-varying shape. The magnetization profiles are constructed by using a melting and solidification method to create the desired shape of both active and passive components. The specific process is as follows: first, the passive material is melted and solidified to form the passive components. Then, the shape of active components with uneven width is laser-cut on the passive components. And finally, the active material is also melted and solidified at the cutout shape positions.
After the two rounds of melting and solidification, a specific fixture is used to fix the shape of the entire product. At the same time, a magnetic field is applied to create the magnetization profiles. After the above process, the fixture is removed, and the component will return to its original state. When the magnetic field is applied again, the product will deform into a specific fixture according to the previously set magnetization profile. To introduce shape programmability into materials, it is proposed to embed high coercivity hard-magnetic particles into a soft polymer. 59
Kim and his colleagues 60 proposed a modeling approach for predicting structural shape changes in this type of magnetic printing material. The team proposed a constitutive law hypothesis for ideal hard-magnetic soft materials. Based on this hypothesis, they believed that applying an external magnetic field would induce torque in the hard-magnetic particles, leading to the emergence of asymmetric magnet-static stresses. Consequently, this would cause an asymmetry in the total Cauchy stresses of both magnetic and mechanical stress components. Based on the principle that magnetic Cauchy stress can cause mechanical effects, an ideal constitutive model of hard-magnetic soft matter is developed with Abaqus.
By conducting experiments, it has been demonstrated that using a simulated model to guide the experiments on hard-magnetic soft materials can enable the complex design of magnetic pole patterns for printing structures. This allows for the construction of magnetic field contours and the design of shape deformations in the structure. 13 Wu et al 37 introduced a magnetic soft actuator based on a liquid crystal elastomer incorporated with Fe3O4 particles. In the process of magnetically assisted programming of the soft actuator, the construction of a magnetization profile was mentioned. In the study, the shape of the actuator was changed artificially, and then its temperature was increased to 150°C by applying a magnetic field based on the magnetothermal response.
The actuator was left to stand in the magnetic field at this temperature for 5 min, and after the dynamic key exchange, the magnetic field was removed. At this point, the magnetic soft actuator returned to its original state. The construction of the magnetization profile for this actuator is completed, and programming shape can be achieved by applying a new magnetic field. Martin et al 61 introduced biomimetic microstructures, such as the cortical bone unit structure, in mammalian cortical bone. They achieved this by coating magnetic nanoparticles onto the surface of ceramic particle materials. This innovative technique allowed each voxel of the material to be programmed to have an oriented arrangement under an applied magnetic field.
Consequently, the productions mimicked the naturally existing discontinuous composite material structures found in nature, ultimately enhancing the mechanical performance of the structure. This article suggests that the research on localized orientation arrangement of rigid components can be extended to 4D printing; to achieve magnetic programming of localized soft magnetic materials, manufacture materials with discontinuous orientation structures, and address the challenges currently faced by 4D printing, such as low printing accuracy and low structural strength. 62
Azukizawa et al 63 have proposed a magnetic soft actuator that is produced by photopolymerization printing. And this actuator involves dispersed magnetic particles in a soft resin. The magnetization profile of this actuator is constructed during the printing process. When it was printed, a permanent magnet is used to align and arrange the anisotropic orientation of magnetic particles in the material, so that the chain clusters formed by the magnetic particles are parallel to the direction of the magnetic field.
In a more detailed manner, Lantean et al 64 systematically investigated the microscopic mechanism behind the formation of chain-like structures in Fe3O4 magnetic nanoparticles. They investigated the effects of four factors, including viscosity of the soft base material, content of Fe3O4 magnetic nanoparticles, intensity of the magnetic field, and duration of the magnetic field, on the construction of magnetic field profiles in the use of magnetic intelligent materials for Digital Light Processing technology. And they studied the microstructure after layer-by-layer analysis solidification, and ultimately demonstrated in situ characterization, proving the precise control of chain length and angle formed by each layer of Fe3O4 magnetic nanoparticles, resulting in a uniform microstructure.
Based on the design of the anisotropy for multiple chain clusters, the actuator can deform when a magnetic field is applied. However, this construction method of magnetization profile is nonreprogrammable. The deformation shape of the actuator is fixed at the beginning of the printing process. Compared with Azukizawa et al., whose actuators can only perform single transformation actions like “rock-paper-scissors,” Zhang et al 3 produced a bionic hand that achieves multiple transformations of a single structure; because it has a magnetization profile that can be reprogrammed by different magnetization curves after being erased.
Furthermore, Hu et al 10 introduced a technology that uses UV lithography to pattern magnetic particles in an oriented arrangement. This allows for selective magnetization of local structures through curing of the resin, thus enabling the construction of a magnetization profile locally. In addition, Zhu et al 65 introduced a mechanically guided 4D printing method for creating magnetization profiles of small-sized structures. This method can be used for programming magnetization profiles of different lengths, sizes, and shapes ranging from centimeters to millimeters.
Application
4D printing technology has a bright prospect for future application and has attracted the attention of many researchers in the past decade. As one of its branches, magnetically controlled 4D printing has opened up a broad avenue for the manufacturing of new actuators and microrobots. It is widely used in the fields of biomedical engineering, industrial manufacturing technology, and flexible electronic devices.
This section summarizes examples of possible widespread applications for magnetically controlled 4D-printed products. Due to the vast number of fields involved, this article primarily focuses on three major application areas: medicine, flexible electronic devices, and industrial manufacturing.62,66,67 It is expected to demonstrate the enormous development potential of magnetically controlled 4D printing in this section.
Biomedical field
The advancement of 3D printing technology and a growing understanding of biological systems have greatly propelled the development of intelligent materials in the field of medicine. This progress has led to the advantages of 4D printing technology, which is being reflected in various medical applications such as medical scaffolds, drug delivery systems, tissue regeneration, and medical soft robotics.67,68 Due to the nontoxic, harmless, and precise controllability of external magnetic field stimulation, magnetically controlled 4D printing has developed rapidly in the field of biomedical engineering. A variety of studies are emerging regarding medical devices manufactured by magnetically controlled 4D printing technology.
Implanting occlusion devices is an effective method for treating congenital heart disease. Lin et al 69 used shape-memory polylactide as the matrix and added Fe3O4 magnetic particles to it as a type of magnetic intelligent material, which is used to produce different shapes of occlusion device frameworks with 4D printing. Applying the external magnetic field, this type of occlusion device can temporarily deform into a linear shape to reduce the size of the incision during implantation in patients. After being implanted into the human body, the occlusion device undergoes permanent deformation and transforms into a bicuspid shape, to promote rapid endothelialization by facilitating cell adhesion, proliferation, and tissue growth, 70 when applied to changing external magnetic fields.
The trachea is the main channel for air exchange inside and outside the human body. A biodegradable tracheal stent is a medical device used to treat diseases such as tracheal stenosis. It can support the tracheal wall at the early stages of treatment, and then gradually degrade on its own after the cell tissue grows along the tracheal wall, eventually being expelled from the body.
Zhao et al 71 used magnetic smart materials to produce a tracheal stent with a shape-memory function by magnetically controlled 4D printing. Similarly, the tracheal stent can temporarily deform into a shape that is easy to enter the human body. After entering the specified position, it can be stimulated by an external magnetic field to restore its initial stent shape within 35 s. Due to the advanced nature of robotic technology, microrobotic surgical techniques have been gradually introduced for some minimally invasive surgeries, including small lesion removal and laparoscopic surgery.
Kim et al. used magnetic 4D printing technology to create a submillimeter self-lubricating soft continuum magnetic control robot, 35 hoping to use it to move and contact lesion locations in complex blood vessels. The robot is filament shaped, with the main body divided into a magnetic-responsive tip and a nonmagnetic active section. The robot is covered with a layer of hydrogel outer layer to improve biocompatibility and reduce movement friction.
According to the experimental results, the friction coefficient was reduced by ∼10 times. After further research, the team combined a real-time fluorescence endoscopic operating system platform, a set of linear drives, and a robotic magnetic mechanical arm capable of manipulating the filamentous robot to develop a remotely operated robotic neurointerventional platform. 72
Patient rehabilitation training and mobility difficulties among disabled individuals have always been the focus of social attention. To improve the mobility of the sick and even disabled individuals, Ploszajski 73 has proposed a novel active reinforcement fabric design. The team uses 3D printing to manufacture a “scale armor”-shaped fabric, which is primarily made of nylon and introduces magnetic fluid particles.
Applying an external magnetic field, this design can provide a certain amount of supporting force to replace traditional passive metal splints. To achieve a more targeted therapeutic effect, further research is being conducted to customize this design. The team uses 3D scanning technology to fit the geometric structure of the limb on the computer and simulates the actuation mechanism.
In addition, they program the shape of wearable assistive devices. This design immerses the printed nylon microstructure in a magnetic fluid, forming a magnetic fluid shell outside the large nylon particles. Zhang et al 24 created a biomimetic human spinal skeleton by magnetically controlled 4D printing. Experimental testing has shown that the spinal structure is able to regain its shape within 100 s. Therefore, it is suggested that different bone structures can be customized and 3D printed as needed. When in use, it is compressed and injected into the designated location, and then can be expanded to the desired size and shape by external magnetic field stimulation.
Precisely targeted drug release at the site of lesions has always been a difficult problem in the biomedical field that people have focused on. To address this problem, Kim et al 13 designed a soft robot with a six-legged structure with magnetically controlled 4D printing technology. Relying on the characteristic of shape change under magnetic field stimulation, the soft robot can roll forward or backward to a specific position with a pill and eventually release it.
Simińska-Stanny et al 74 successfully assembled nonmagnetic hydrogel and magnetic hydrogel into a single structure using 3D printing technology. By arranging magnetic and nonmagnetic materials in different configurations and applying a directed magnetic field, the structure can exhibit diverse movements. Based on this principle, they designed a tubular structure, as shown in Figure 2f, which is intended for transporting lightweight items in sterile areas.

A tubular structure with symmetrical distribution of materials (such as A and B) is capable of linear movement, with a distance of up to 50 cm and a maximum uphill angle of 10°. A tubular structure with nonsymmetrical distribution of materials can undergo curved trajectory movement under the influence of a directed magnetic field. Due to the nontoxic and nonhazardous nature of the magnetic field, magnetically controlled bioinspired microswimmers are often expected to be used for targeted drug delivery inside organisms. Biomimetic swimming microrobots achieve self-assembly and positional movement inside the human body through magnetic field control, effectively reducing the risk of bodily rejection and extending their service life.75,76
According to Piazzoni et al., 77 to improve the swimming speed of robotic swimmers, a swimmer with artificially controlled water–gel porosity rate was fabricated using UV-cured 3D printing. It is believed that the combination of magnetic materials and this printing technology has the potential to create magnetic field-controlled swimming robots with smaller volumes, faster swimming speeds, and more precise control of swimming directions.
Flexible electronic device field
The ability to simulate flexible skin and human touch is a manufacturing requirement for the new generation of sensors, and the emergence of flexible electronic devices has proposed new solutions for this requirement. The solution is to integrate different responsive stimulus materials with functional characteristics into traditional structures such as wires, coils, and functional films to achieve machine functionalities; for example, gripping, lifting, walking, swimming, or crawling. 78
The application of 3D printing technology in the manufacturing of flexible electronic devices has become relatively mature. Therefore, the emergence of 4D printing has raised new questions for researchers, whether it can be integrated into the manufacturing of flexible electronic devices, and the answer is yes.
Zhang et al 79 introduced a flexible tactile sensor, which is manufactured by DIW printing. The sensor mainly utilizes the linear relationship between the magnetic field signal and the load and position, and combines the folding magnetization method to improve the magnetic field strength around the three-dimensional Hall element sensor. This tactile flexible sensor can respond to the position and size of the force in the confined space. Its lights of different colors on the sensor correspond to different force positions.
Kim 13 has proposed a concept of reconfigurable electronic devices. By applying an external magnetic field in different directions, electronic devices have different forms and can achieve different functions. Lazarus et al 80 combined magnetic and conductive materials. By using 3D printing, they have manufactured magnetic core inductors, magnetic core transformers, and wireless power receiver coils containing ferromagnetic fluids, as shown in Figure 3.
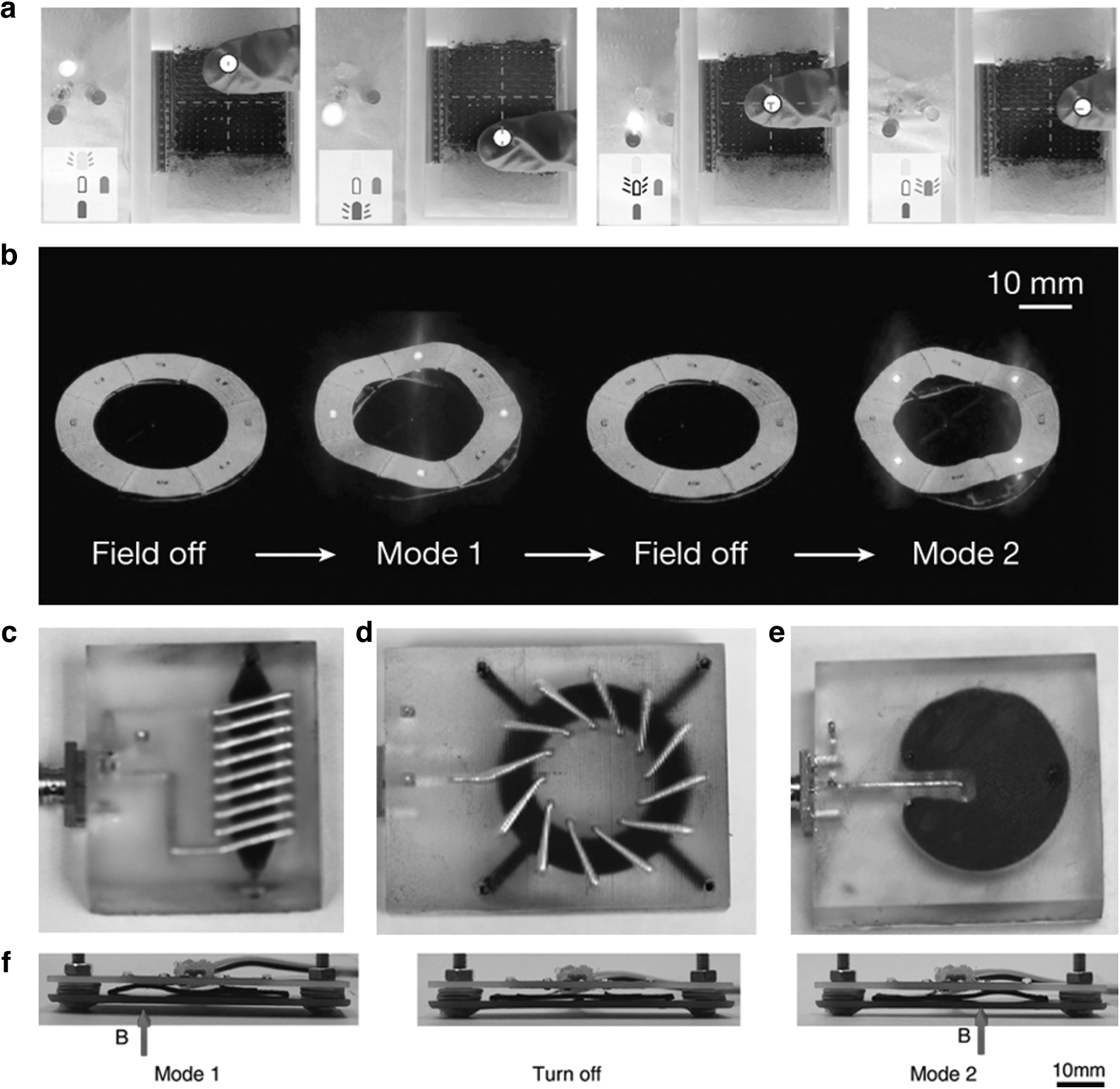
After testing, the inductance density of an inductor filled with ferromagnetic fluid has increased by nearly three times compared with traditional inductors. Chatzipirpiridis et al 81 used thermoplastic-bonded magnetic composite materials for 3D printing. They have successfully manufactured a set of miniature self-assembled planetary gearboxes, which contain both magnetic and nonmagnetic gears.
The maximum rotation frequency of this gearbox is 28 Hz, and the team proposed an idea that this gearbox is possible to become a magnetic rotary encoder in the future. Using the technique of constructing a small structure magnetization profile, Zhu et al 65 developed a multistate magnetic switch associated with electronic devices. This kind of switch can control the on/off state of LED lights through external magnetic stimulation.
Industrial field
Industrial manufacturing requires mechanical grippers to have high adaptability, high response speed, and precise detection of objects touched. Traditional rigid robots achieve multidegree of freedom motion through a large number of rigid connection joints, so most rigid robots have limited degrees of freedom. However, limited degrees of freedom are not enough to achieve free motion in complex environments.82–84 And rigid structures are often difficult to handle fragile items, so flexible grippers are needed to overcome these difficulties.
There are many driving methods for flexible gripper actuators. Magnetic driving is one of the most commonly studied methods. The emergence of functional MASM has also prompted magnetic soft robots to enter the research focus of researchers. 85
Sun Yat-sen University 41 has developed a flexible gripper with four fingers by magnetically controlled 4D printing, which has a fast response speed and can adapt to various special situations. After experimental measurements, the maximum gripping weight of the gripper is 30 times the weight of the gripper itself.
Wu et al 18 developed a gripper with five evenly spaced fingers using laser sintering printing. They conducted characteristic experiments on grippers with different magnetic particle mass fractions, and found that the sample with a magnetic particle content of 30 wt% had the best characteristics. Its maximum elastic modulus is 70.53 MPa, and the maximum elongation at break is 89.5%. Compared with clamps made of photosensitive resin, this gripper has better mechanical strength and a satisfactory flexibility effect.
By applying a magnetic field, the soft robot with six legs changes its posture. Kim et al 13 utilized a variable magnetic field to create a state, with six legs bulging and the center concave, for the soft robot, enabling it to support objects with a certain shape and size for rapid movement. Lantean et al 86 successfully produced magnetic response gear, magnetic response Archimedes screw, and magnetic response hammer actuator using magnetic control 4D printing, and combined them with nonmagnetic components.
By applying an external magnetic field, torque is successfully transmitted to other gear sets, forming a magnetic drive gear train. Based on the successful combination and movement of the components described above, they proposed the idea of a magnetically controlled gripper remotely.
Conclusion
The development trend of industrial manufacturing is nothing more than two major propositions: informatization and intelligence. Magnetically controlled 4D printing technology combines both characteristics and is an inevitable choice to comply with the development trend of industrial manufacturing. As a cutting-edge processing and manufacturing technology based on functional materials, magnetically controlled 4D printing technology has found a breakthrough for the previously difficult scientific and technological problems.
The characteristics of magnetic materials and the optimization of equipment processes will have a certain impact on the functionality of 4D printing products, ultimately affecting the future development of 4D printing. Therefore, in exploring this field, understanding the materials, printing process, and application possibilities of magnetically controlled 4D printing is crucial for conducting systematic research in this field, and has certain guiding significance.
Despite the rapid development of magnetically controlled 4D printing in the past decade, there are still many areas to be improved. For example, many materials used for magnetically controlled 4D printing are still a simple composite of magnetic and nonmagnetic materials. In addition, the thixotropy, rheological and magnetic properties of the ink do not meet the expectations, which will result in the poor structural strength of processed products and inaccurate shape change control. Therefore, the exploration of magnetic printing ink materials requires more in-depth research by researchers. And the high costs and low production efficiency of this technology all need to be addressed.
Although magnetically controlled 4D printing still faces many challenges, its vast potential for future applications cannot be ignored. The emergence of magnetically controlled 4D printing is expected to solve some existing industrial problems and provide new adaptive intelligent material structures for biological applications. Magnetically controlled 4D printing technology has a bright future and is the key to further deepening development in many fields. This article believes that one day magnetically controlled 4D printing will eventually enter every aspect of our lives.
Footnotes
Authors' Contributions
J.L. contributed to conceptualization, writing—original draft, investigation, resources, writing—review and editing. H.C. assisted with project administration, conceptualization, funding acquisition, resources, supervision, writing—review and editing. J.X. and J.Z. conducted visualization, investigation, writing—review and editing. Z.L. designed conceptualization, resources, and supervision.
Author Disclosure Statement
The authors declare that there are no conflicts of interest.
Funding Information
This research was supported by Beijing Natural Science Foundation (2222072), Foundation of Key Laboratory of Vehicle Advanced Manufacturing, Measuring and Control Technology (Beijing Jiaotong University), Ministry of Education, China (M21GY1300050), the Fundamental Research Funds for the Central Universities (2022JBMC032), and National Major Instrument Research and Development Program of Natural Science Foundation of China (51927810).