
Abstract
We have developed the space suit simulator Aouda.X, which is capable of reproducing the physical and sensory limitations a flight-worthy suit would have on Mars. Based upon a Hard-Upper-Torso design, it has an advanced human-machine interface and a sensory network connected to an On-Board Data Handling system to increase the situational awareness in the field. Although the suit simulator is not pressurized, the physical forces that lead to a reduced working envelope and physical performance are reproduced with a calibrated exoskeleton. This allows us to simulate various pressure regimes from 0.3–1 bar. Aouda.X has been tested in several laboratory and field settings, including sterile sampling at 2800 m altitude inside a glacial ice cave and a cryochamber at −110°C, and subsurface tests in connection with geophysical instrumentation relevant to astrobiology, including ground-penetrating radar, geoacoustics, and drilling.
The communication subsystem allows for a direct interaction with remote science teams via telemetry from a mission control center. Aouda.X as such is a versatile experimental platform for studying Mars exploration activities in a high-fidelity Mars analog environment with a focus on astrobiology and operations research that has been optimized to reduce the amount of biological cross contamination. We report on the performance envelope of the Aouda.X system and its operational limitations. Key Words: Human Mars exploration—Planetary protection—Space suit—Simulator. Astrobiology 12, 125–134.
1. Introduction
R
However, there is only sparse experimental data available on the potential contamination vectors. Hence, also from the astrobiological perspective, the study of scientific and operational aspects of human Mars missions under high-fidelity conditions has become a major field of investigation for mission planners. Two of the key elements of such activities are space suits and mobility systems, such as the NASA Lunar Electric Rover (Garry and Bleacher, 2010), habitat structures like the NASA Habitat Demonstration Unit in Arizona (Kennedy et al., 2010), and the Mars Desert Research Station in Utah (Westerberg et al., 2009). Knowing the routes and quantities of contaminants enables the development of technologies, tools, and operational procedures to minimize the hazard of sample contamination below an acceptable limit. Such a limit would be defined as being below the detection threshold of the most advanced life-detection instruments at a given time.
Aouda.X (see Fig. 1) has been developed to reinvigorate the debate as to whether humans should be allowed to access astrobiologically sensitive areas on Mars. We identified the following fields as relevant for studying contamination vectors in the context of crewed extravehicular activities (EVAs) (Groemer, 2008).

Photograph of the Aouda.X space suit simulator (Photo: M. Lang). Color images available online at
Key aspects of the space suit simulator
•
•
•
•
•
Considering these aspects, the following supplementary assets have been developed in addition to the Aouda.X space suit simulator: a Mars Exploration Rover—class Mars analog rover (“Phileas”), sampling tools, an operational infrastructure (Mission Control Center during field tests), and a most likely mission scenario, similar to the NASA Design Reference Mission (DRM Version 5, Hoffman, 2001), with elements from the Aurora exploration scenario of the European Space Agency (Kminek, 2004). In addition, various geophysical methods were tested under simulated planetary exploration scenarios: ground-penetrating radar, geoacoustics, Raman and visible/near-IR spectroscopy, photo interpretation, and remote science support infrastructure (a research team using the suit's telemetry stream and data from the field instruments to support the crewmember in the field in near-real time) in order to assess their usability in the field.
2. Aouda.X Materials and Configuration
Developed between 2008 and 2011, Aouda.X is a prototype for a high-fidelity space suit simulator optimized for astrobiological exploration on Mars. The NASA Advanced EVA capabilities study (Hoffman, 2004) concludes that (as opposed to current EVA systems used, e.g., on the International Space Station, for future missions), the EVA garment must have sufficient mobility to allow the EVA crewmember to walk (the current EMU [Shuttle/Station Extravehicular Mobility Unit] and Orlan garments do not have this capability), reach objects on the ground, and operate in a dusty, low-pressure…environment for…up to 550 days and 200 sorties …, with only maintenance and servicing available from the crew.
Aouda.X is designed to reflect the major limitations a space suit would have under 0.38g gravitation at 10 mbar ambient atmospheric pressure, including physical load (mechanical counterpressure for all joints, weight, and range of motions), sensory limitations (impaired vision, hearing and tactile senses, added cognitive workload when operating a complex system), technical constraints (finite energy supply and telemetry bandwidth, finite robustness of the mechanical structures, thermal control system constraints), but also the advantages a future space suit will offer. This includes enhanced situational awareness by means of an On-Board Data Handling (OBDH) system that autonomously monitors vital functions of the crewmember as well as engineering and environmental sensor data. It also assists the suit tester by means of a software assistant that records parameters during sampling (e.g., position, environmental data, audio commentary, and sample number for each sampling).
2.1. Structural layout and materials
Aouda.X is based upon a Hard-Upper-Torso (HUT) system with a rigid fiberglass chest-corselet with aluminum enforcements for heavy-load parts and a personal life support system in the backpack (see Fig. 2). The thermal underwear is made of polyester microfiber with embedded microcapsules of phase change materials. The phase change material granules have a surface density of 3 million capsules per square centimeter and interact with the skin's temperature to provide a buffer against temperature swings. The underwear is also the carrier matrix for electric wires (sensors, power, and data).
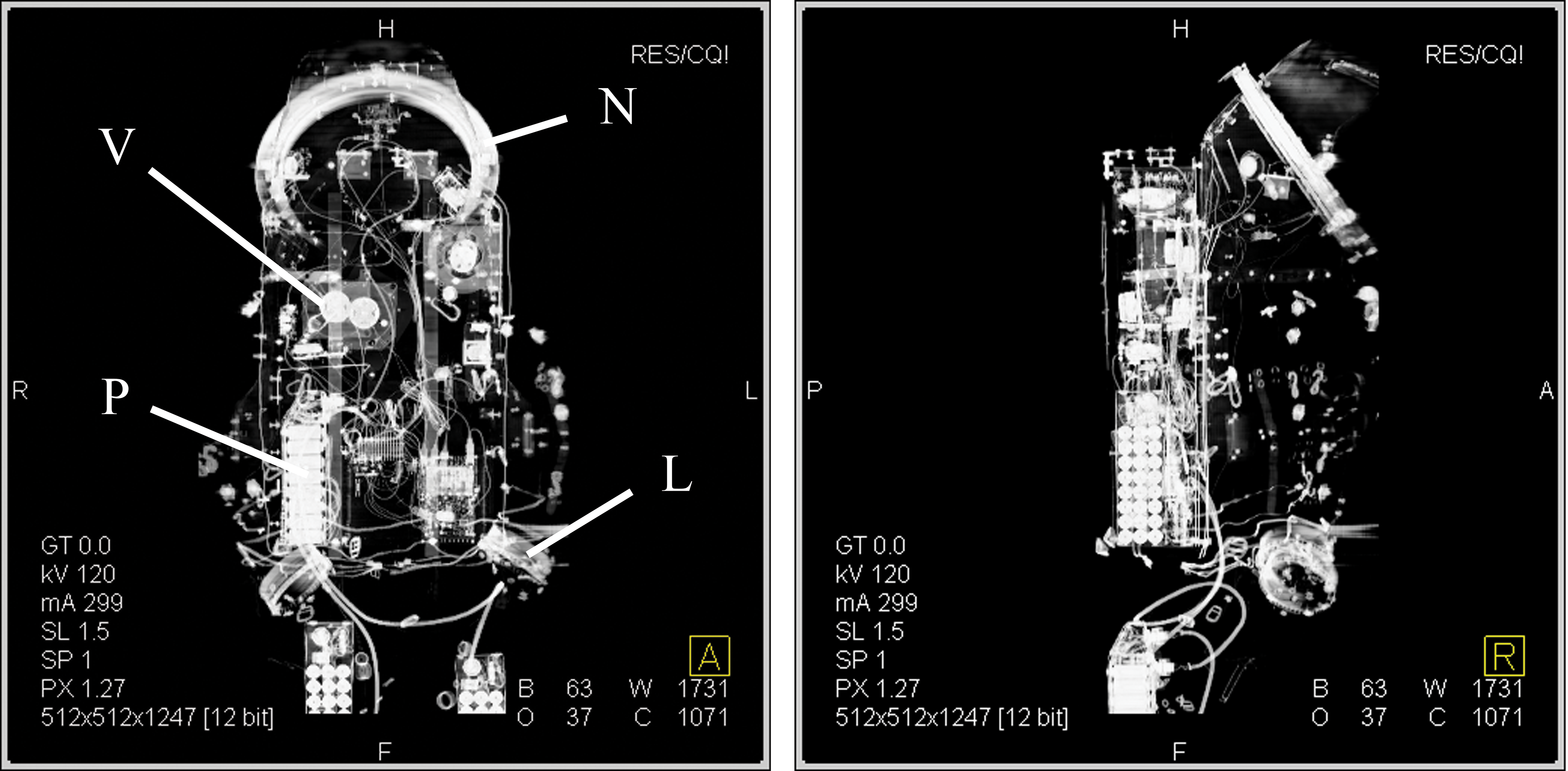
Computer tomography of the Aouda.X Hard Upper Torso (lateral and anterior view based upon 3714 individual images). Orientation landmarks: aluminum neck ring (N), ventilation elements (V), lock interfaces for the gloves (L), and the power packs (P). (CT-Image: Med. Univ. Innsbruck, Dept. of Radiodiagnostics/TILAK). Color images available online at
We have decided for a HUT and against a rear-entry space suit, due to the following issues: • • • •
Depending on the torso mounting, the donning can in principle also be done by a single assistant. Field tests in 2005 also showed that rear-entry suits do need assistants (Graziosi et al., 2006). Another difficulty for the suit subject is securing a waist belt and shoulder harness system to carry and relieve the weight of the suit and liquid air backpack. For all the pressurized suit runs at Desert RATS (Research and Technology Studies), each suit had a support team that aided in donning and doffing along with securing the weight relief devices. In addition to these technical challenges, rear-entry suit port mechanisms are also patent-protected (US Patents 6959456 and 5697108).
Between the inner and the outer layer—instead of the pressure hull—we have implemented the mechanical exoskeleton (see below).
The outermost layer is comprised of Inventex, a fabric made of a Kevlar (30%) and Panox (70%) textile, coated with an aluminum layer (Fig. 3). The Kevlar fiber starts to degrade at 420°C; for short duration it can withstand higher temperatures. The second component, Panox, is a preoxygenated polyacrylnitrilfiber with >60% carbon content and a very high limited oxygen index of 45 and a specific weight of 332 g/m2.
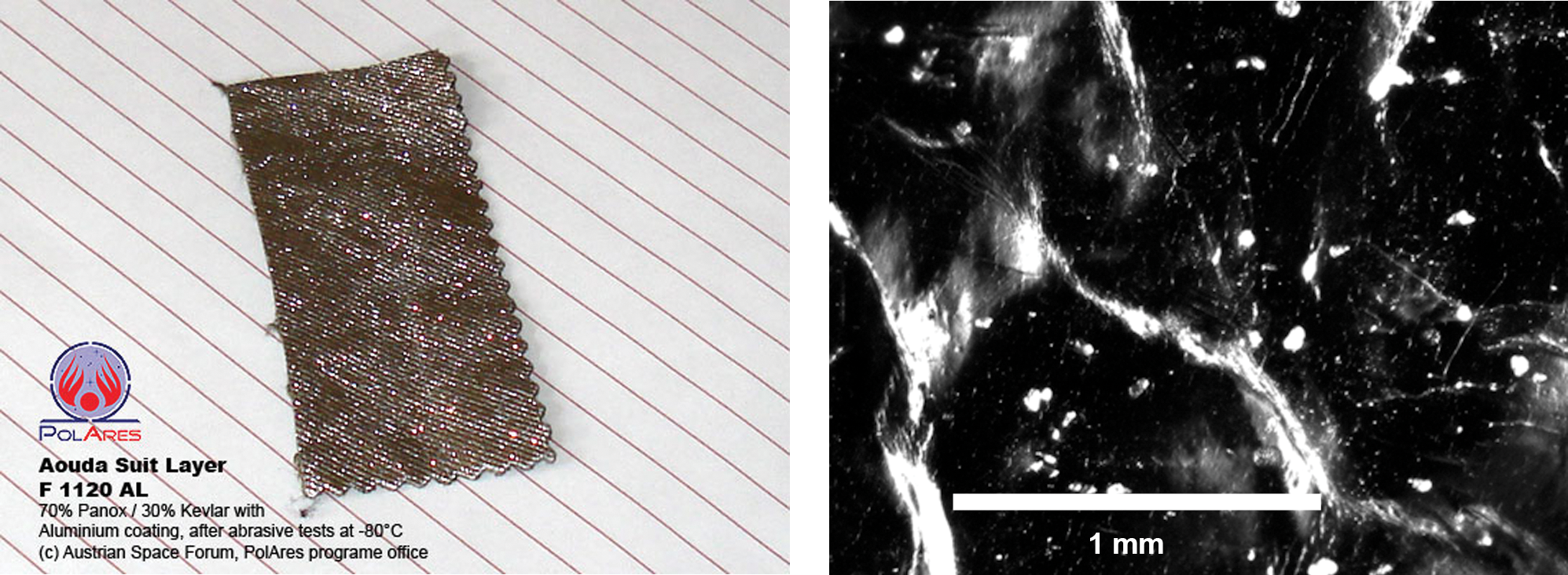
Tissue sample of Inventex after abrasive tests at −80°C (lines are 1 cm apart). The right image shows the fine structure of the aluminum coating under 50×magnification (scale bar is 1 mm). Color images available online at
The helmet has a visor made of 5 mm poly-methylmethacrylate and hosts a head-up display to display procedures, sensor data, video signals from other external cameras, or maps. Additional features include a food and water dispenser for drinking as well as provisions for human metabolic waste. Thermal control, body moisture and carbon dioxide removal, as well as air supply, are achieved with a redundant ventilation system in addition to electrical heaters for the air intakes and foot heaters.
The total system weight is 45 kg; the average donning time is 90 minutes. At least two assistants are required for mounting the simulator.
2.2. Power and communication
The power system of Aouda.X is based upon three power cells with 180 Wh per cell with custom built LiFePO4 accumulators that enable discharge temperatures down to −20°C with a main bus voltage of 26.4 V. The OBDH system can run >20 hours per cell, and the ventilation system lasts 5–6 h, depending on the actual ventilation and thermal control system power needs.
Communication with the Mission Control Center (MCC) and the field operations team is ensured via two W-Lan systems that operate at 5 and 2.4 GHz and a backup radio system, which is based upon industrial professional PMR radios. The 5 GHz network provides a bridged access-point to access-point connection by using Wireless Distribution Service at a speed up to 150 Mbit/s (IEEE 802.11n standard using one antenna). The 2.4 GHz network is configured to act as an access point for an IEEE 802.11b/g network, which means that standard commercial network interfaces can connect devices to the suit network, for example, to communicate with the suit by using a smartphone to download telemetry in real time.
For safety reasons, a commercial GPS satellite tracking device enables a positioning accuracy of 6.4 m during field tests.
2.3. On-board data handling and software
The Aouda.X data handling hardware is based upon an Intel Atom Z510 hyperthreading dual core processor that operates under Ubuntu Linux. External sensors are connected via Programmable Interrupt Controllers in the arms and torso to enable an A/D conversion and preprocessing of the data. These nodes manage power, setup, regular data reading, and alarms of sensors and actors via various busses (USB, I2C one-wire, and Ethernet).
The sensor network of the current configuration monitors 3 voltages, 17 temperatures, CO2, helmet humidity, pressure, helmet visor dew point, acceleration, heart rate (via earlobe plethysmography), and continuously relays video and audio from the crewmember. The data are compiled with a custom-made software package, MARVIN (Mars Analog Versatile Information Network), and displayed internally on the head-up display as well as relayed via Wlan to the MCC with the NI Labview-based software package EDDy (External Data Display).
2.4. Human-machine interfaces and operations
To operate the suit's OBDH system, the suit's on-board computer recognizes voice commands and talks back to the suit tester. In addition, if the audio connection should become inoperative, flight operators can send text messages to the display, which are read by a voice synthesizer.
As voice commands are rather inflexible when navigating through complex menus, we have implemented a set of three digital accelerometers built into the middle layer of the suit gloves on both sides. These are connected to a Programmable Interrupt Controller processor on the back of the hand to perform the preprocessing of the data with a 10-bit resolution for 2, 4, or 8 g and pulse recognition. These allow the crewmember to navigate through the head-up display menu similar to a computer mouse.
In addition, accelerometers can also be used for navigation: when integrating the average of the six accelerometers, inertial navigation, for example, in subsurface environments is possible for short ranges.
To operate Aouda.X, additional hardware like an on-site server infrastructure and satellite communication have to be set up. Via a Virtual Private Network tunnel, the full telemetry can be relayed to the MCC, which may interact with the suit by, for example, adjusting the ventilation or thermostats.
In addition to the MCC, the Field Control Center is a forward field element that represents a local asset, such as a (simulated) martian habitat or an orbital station, to collect and disseminate data in real time. During field simulations, the Field Control Center serves as a network hub and local command infrastructure that can operate autonomously from a MCC, but it also serves as a relay and hosts safety personnel for contingency situations supervised by a biomedical engineer at the MCC.
2.5. Contamination protection and monitoring
Aouda.X has been designed to minimize the amount of biological transfer between the environment and the inside of the suit. We have implemented a biobarrier made of Inventex (see above) that is coated with aluminum to reduce the adhesiveness for fluids and dust particles. At temperatures ranging from −110°C to +250°C, the material's mechanical properties (response to thermal and abrasive stress) remain nearly unchanged, although it does not provide any radiation protection. The outer hull has a smooth surface to minimize the sticking of larger dust particles, as was the case on the lunar Apollo A7L suits' outer tissues.
Vibrational tests at 156 kHz for 1 min showed that only 5–10% of the granular material with sizes <90 μm adhered to the outer-layer textile (Groemer et al., 2009).
To monitor a potential contamination, a microspherule suspension (10 μm sized coated carboxylate-modified polystyrene beads) is used in various concentrations and excitation wavelengths. This method has proven to be a sensitive, highly specific, and robust quantitative tracer for both forward and backward contamination (Groemer et al., 2011).
With this procedure, the contamination potential of the suit simulator is tested. However, we cannot offer any prediction as to the possibility of sterilizing the actual tissue used before a Mars mission. The type of textile that will ultimately be used is still an unknown component; hence, we focused on studying the material properties of Inventex as a potential candidate textile. However, the tissue used for a real mission—and as such its decontamination procedures—may deviate from these properties.
3. Performance Envelope
3.1. Exoskeleton
Governed by thermodynamics, the work required to change the volume of a gas is given as
where p is the pressure and V is the volume before (V 1) and after (V 2); the force required to actuate joint movement can be inferred from this expression, as an extrapolation is made as to the length through which the actuating force travels. However, this approximation represents only the “worst case” upper limit calculation, assuming a strictly cylindrical geometry, that leads to high physical workloads. For example, assuming a suit pressure of 0.6 bar, this would lead to a required force of 7300 N for bending the waist of an average human. A better approximation is done by using toroidal cylinders, bellows (e.g., like in a moving worm), and convolute joints, as well as hard convolute sections, to reduce this workload significantly.
In summary, the geometry of the joints as well as the pressure applied are the two major factors that determine the force requirements. The European and Russian space suit systems use a pressure regime of typically 0.4 bar (including the Orlan-M—derived “Mars500” EVA system); the US systems are tailored to 0.6 bar. Hence, it is possible—as far as the reference designs of future Mars surface space suit systems are available—that a martian space suit system will also use these values. The principle lower limit is 0.2 bar with a 100% oxygen atmosphere due to the required partial pressure of oxygen. However, this imposes an unacceptable safety risk with respect to fire hazards within the suit system. Mechanical counter-pressure systems that use human subject—specific “lines of non-extension” avoid the usage of a pressure hull (Carr, 2005). However, there will still be a significant counterforce from the thermal and micrometeorite garment.
The Aouda.X simulator does not have a pressurized hull; instead it has a network of calibrated expander strings mounted to the rigid elements of the suit to simulate the mechanical counterforce a crewmember would experience (Fig. 4a). The majority of the physical exhaustion experienced during EVAs comes from the gas counter pressure. Hence, mimicking these forces is an essential element of a high-fidelity space suit simulator.

(

The set of strings runs from the tip of the fingers throughout the entire movable sections of the body and can be adjusted to compensate for different limb lengths of each crewmember as well as for various pressure regimes.
3.2. Performance envelope measurements
With 3-D motion capture technique, the physical performance envelope of Aouda.X was studied on a human test subject. The built-in exoskeleton is designed to emulate the torque developed by a space suit with positive internal pressure when a joint of the suit bends. The following movements were analyzed with 2-D and 3-D motion capturing: shoulder flexion, elbow flexion, hip flexion, knee flexion, ankle flexion, shoulder abduction, hip abduction, thigh rotation, and humerus rotation. Furthermore, the maximum volume (reach envelope) the test subject could enclose with his arm movements (two- and one-handed) was analyzed with respect to the limited field of view due to the suit's helmet. The results were compared to data of the NASA Extravehicular Mobility Unit (EMU).
3.3. Measuring method overview
Simi Motion was used to calibrate the plane of motion, track reflecting markers automatically, and further on export their trajectories. The angles were analyzed by using simple vector algorithms to find the extreme angles.
For the two-handed reach envelope, the subject was instructed to hold a small object (pencil) in his hands and move it on horizontal planes on the edge of the largest possible area. The subject started on the lowest possible plane and finished on the highest. For the one-handed reach envelope, the procedure was the same, apart from the subject executing the movement with only one hand and no object in his hand.
To receive the significant limitations of ranges of freedom (2-D analysis), the subject performed a set of specific 2-D motions. The movements were performed two times: first while wearing a flexible tracksuit to keep the effect on mobility as small as possible. The second time, the movements were performed in the Aouda.X space suit simulator. The results are given in Fig. 4b (suited vs. unsuited 2-D mobility), Fig. 5 (comparison of Aouda.X with the EMU), and Fig. 6 (3-D motion range, one-handed and two-handed).
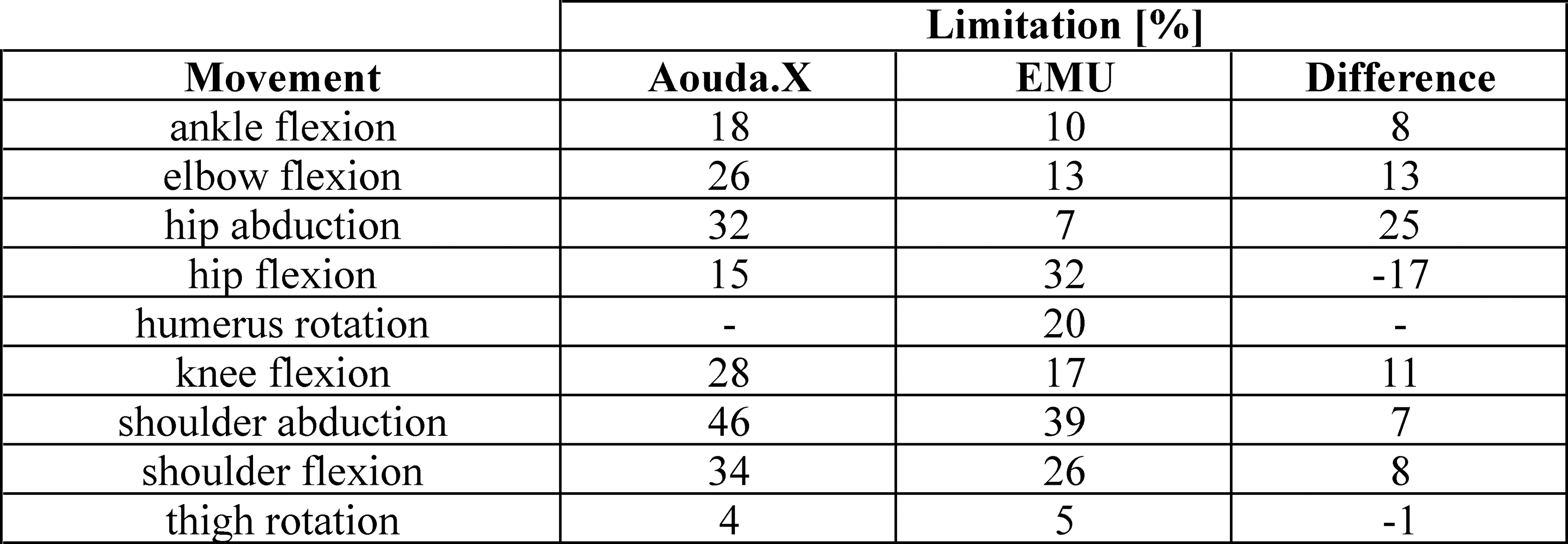
Comparison of the movement limitations between the NASA EMU and Aouda.X.
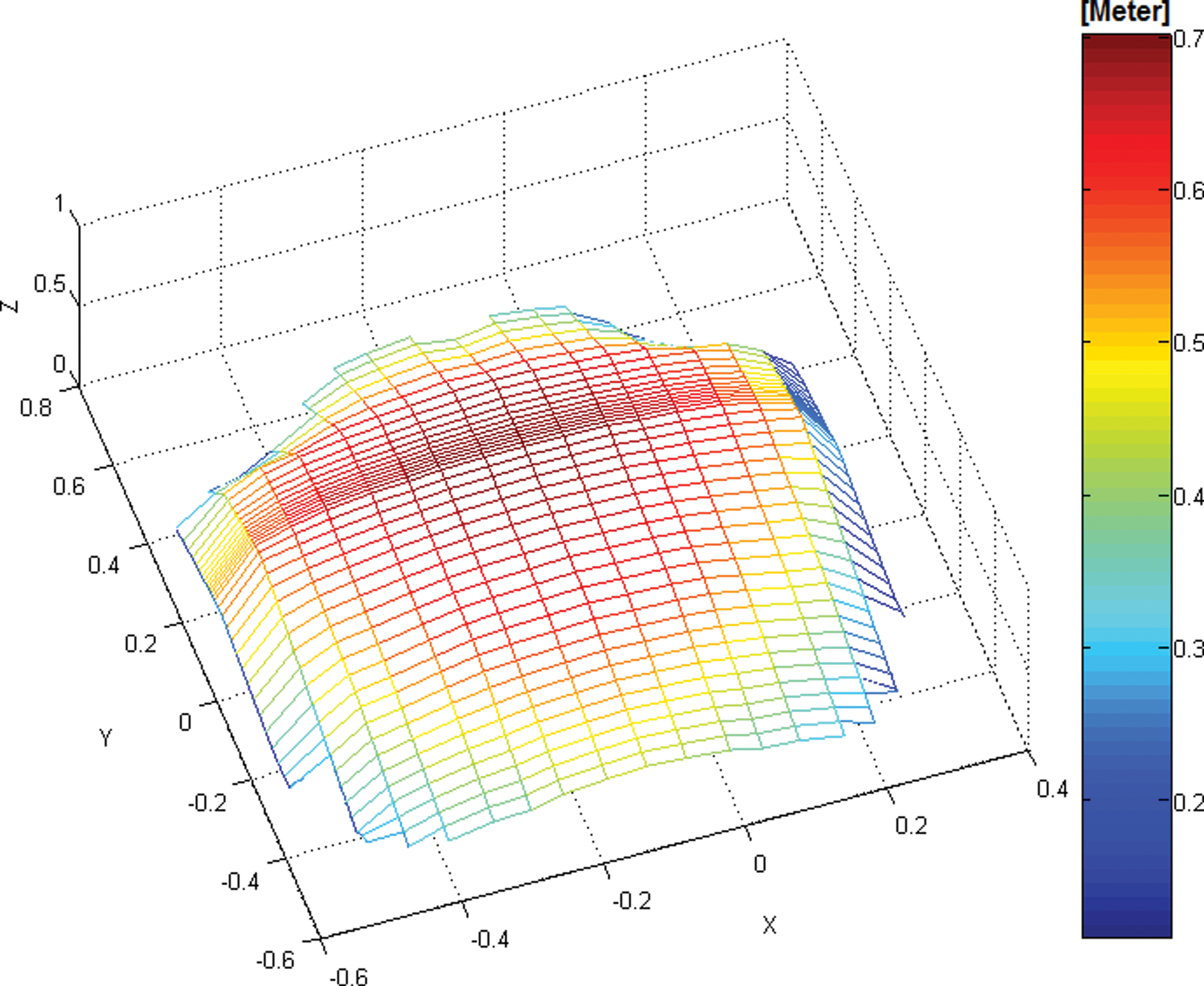
3-D motion range measurement with one hand (right) and two hands (left); the coordinate system's origin is defined by a marker on the suit tester's xiphoid (lower end of the sternum). Color images available online at

Our data show that the one- and two-handed reach envelopes differ strongly (0.37 m3 vs. 0.099 m3) and are both not majorly affected by the analyzed field of view (one-handed: −0.79%, two-handed: −2.88%). The limited mobility of 2-D joint movement could, however, be compared to data of the EMU and reveals possible areas of future adoptions for the Aouda.X space suit simulator, as six out of eight movements had greater limitations with the Aouda.X. The 3-D analyses of the reach envelopes indicated significant influence of the HUT on medial humerus movements especially in cranial direction.
4. Simulation Fidelity
4.1. Weight-to-force ratio
Space suits impose kinematic and kinetic boundary conditions that affect movement and locomotion and the metabolic costs of physical activity. Carr (2005) showed that, in reduced gravity environments, running in space suits is likely to be more efficient per unit mass and per unit distance than walking in space suits and further that the results would suggest that space suits may behave like springs during running.
The Aouda.X space suit simulator was designed to mimic these major limitations an astronaut would experience. The weight-to-force ratio has been set to reflect the weight the suit would have on the planetary surface. Subsystems that would be essential on Mars and contribute significantly to the mass of 120 kg can also be simulated adequately on Earth by other solutions and were hence replaced, for example, by using an ambient air ventilation system instead of a closed-circuit rebreather, or an open-loop thermal control system. The total system weight on Mars as such would not exceed 46 kg.
4.2. Contamination control
Previous and current suit systems have high leakage rates, averaging over 100 standard cubic centimeters per minute leakage. For example, the airflow path for space suits from Gemini through the Shuttle era conducts breathing gas into the helmet and the torso, where it is then collected for CO2 removal, temperature control, and replenishing with oxygen. The result of this type of design is that over 50 L of contaminant and human-borne bacteria and other effluent will be released through the suit joints and into the pristine martian surface during an average EVA of 4–6 h (Kuznetz, 1992).
Although Aouda.X is not pressurized (which hinders us from studying leakage rates), we minimize the amount of biological transfer by the following measures: • • • •
5. Discussion and Implications
Aouda.X has been tested under various conditions to gain operational experience. These tests started with a commissioning in a quarry near Kramsach/Austria to demonstrate the basic functionalities in mid 2009. The following simulations focused on mobility tests and thermal behavior (e.g., at −110°C in a human-rated cryochamber, Seefeld/Tyrol in September 2009) as well as in combination with typical geophysical instrumentation [ground-penetrating radar, geoacoustics, sampling (Pasterze glacier region, August 2009)] in various terrains [on and inside a glacier at 2800 m altitude (Kaunertaler glacier/Tyrol, July 2010)], in the subsurface at the Koppenbrueller cave in Upper Austria (March 2010), and in an integrated high-fidelity test at the Río Tinto Mars analog site in southern Spain (April 2011, see Fig. 7). During these tests, we gained operational experience, learned to understand the behavior of the suit, and explored procedures for the microspherule sampling.

Aouda.X during a field test at the Río Tinto Mars analog site in southern Spain (April 2011), operating the Eurobot Ground Prototype of the European Space Agency (Photo: ÖWF). Color images available online at
After 3 years of development, Aouda.X has proven to be a robust asset for simulating human exploration on Mars. The fidelity of the suit covers the following areas: • Implementation of all major limitations a space suit will likely have on Mars (including workload, sensory deprivation, but also improved situational awareness). • A realistic operational model: This encompasses timing and flight planning, servicing and communication infrastructure, and manpower needs for field operations. Only a fraction of the EVA time can actually be spent for science activities. At this stage, the space suit simulator has not only become interesting for astrobiology field research but also for mission planners and the human factors field. • An effective biobarrier through the choice of materials, suit design, and monitoring assets. However, as Aouda.X is not pressurized, the simulator is not allowing the study of gas leakage.
Footnotes
Acknowledgments
The development of the Aouda.X simulator was funded through a “generation-innovation” grant of the Austrian Federal Ministry for Transportation, Innovation and Technology. The most likely Mars exploration scenario was studied under a funding scheme of the Tyrolean Science Fund; the data analysis of the ground-penetrating and georadar measurements were sponsored by the Fund of D. Swarowski & Co. We also acknowledge the assistance of the University Hospital Innsbruck/Department of Radiodiagnostics I for the computer tomography work.
Author Disclosure Statement
No competing financial interests exist.
Abbreviations
EMU, Extravehicular Mobility Unit; EVAs, extravehicular activities; HUT, Hard Upper Torso; MCC, Mission Control Center; OBDH, On-Board Data Handling.