
Abstract
The close examination of cliff strata on Mars may reveal important information about conditions that existed in the past on that planet. To have access to such difficult-to-reach locations, the Association Planète Mars (France) has, since 2001, been experimenting with designs of manually operated, instrumented vehicles capable of being lowered down the faces of cliffs. The latest tests in the series in which the Cliff Reconnaissance Vehicle (CRV) or Cliffbot was used were conducted as part of the Austrian Space Forum's MARS2013 field analog project in Morocco in February 2013. Experimentation centered on vehicle configuration for maximum all-terrain capabilities; operational procedures, which included use while the operator was wearing an analog space suit; and imaging, mapping, and geological/biological feature detection capabilities. The exercise demonstrated that Cliffbot is capable of examining hard-to-reach rock strata in cliff faces but that it needs further mechanical modification to improve its ability to overcome some particular terrain obstacles and situational awareness by the operator. Key Words: Mars—Exploration—Human missions—Analog research—Cliffs—Geology. Astrobiology 14, 406–416.
1. Introduction
I
In 2001, the Planète Mars association decided to experiment with designs for instrument-bearing vehicles that would be capable of examining otherwise unreachable strata in cliff outcrops. Since the beginning, the Planète Mars concept was centered on a vehicle (referred to as the Cliff Reconnaissance Vehicle or CRV) operated by an astronaut located at the top of the target cliff, who would lower the vehicle down the cliff face and bring it back up at the end of the study exercise. Around the same time, the Jet Propulsion Laboratory (Pasadena, CA) also initiated experimentation on “cliffbot” rovers (e.g., Pirjanian et al., 2002; Schenker et al., 2003). Their concept was to have two anchoring rovers located at the top of the target cliff and a third rover operating on the slope of the cliff that was linked by a tether to the two anchoring rovers. The two anchoring rovers were designed to release or rewind the tether linked to the cliffbot, and the cliffbot itself had wheels with motors. Their system was designed to be operated with remote instructions (e.g., from Earth). Additionally, the University of Nebraska—Lincoln has also conducted experiments on the two anchoring rovers plus one cliffbot rover concept (Paulsen, 2005; Paulsen et al., 2005).
2. Initial Planète Mars CRV Experimentation
The initial tests of the CRV system (Fig. 1) occurred on a Seine river chalk cliff in Vernon, France, in November 2001 (Souchier, 2002). The main objective, in the first tests series, was to find the best configuration for an all-terrain vehicle for steep slopes, vertical cliffs, and slopes even greater than 90° (overhangs). A video camera was fitted to obtain an initial view of what could be observed by the vehicle along the cliff. The general design was a four-wheel vehicle, equipped with 1 m long lateral rods to avoid a±90° roll tip-over. Only one tether was used to suspend the vehicle, but close to the vehicle the single tether was divided in two, and closer to the vehicle in four. By this configuration, the vehicle could come back from an overhang only in the 0° or 180° (inverted) position. In the case of an inverted position, the vehicle would slide on its ski-like back structure.

The first CRV tests. From left to right: Test 2 (2/12/2001) on an 18 m quasi vertical cliff, Test 6 (31/12/2001) on an overhang, Tests 7–10 (3/01/2002) on a clay 30° slope with embedded fossils. (Courtesy of APM/A. Souchier.) (Color images available online at
3. First Tests in Exploration Simulation Missions
The US Mars Society implemented a simulated martian habitat in the Utah desert close to Hanksville in 2001, and a member of the Planète Mars team was selected in the second crew to occupy this Mars Desert Research Station (crew MDRS 2). Tests of the CRV were conducted at that time at the MDRS location, “in (suited) simulation,” and no significant negative results occurred due to operational restrictions imposed by the user wearing a spacesuit (Fig. 2). This result was interesting because the vehicle was not initially designed for preparation and operations when wearing the analog space suit's heavy gloves. Additionally, the weight of 80 N (corresponding to the 8 kg vehicle mass under 1g) was far higher than the probable weight on Mars of a smaller-mass operational vehicle under 0.38g. We therefore consider these tests as a worst-case demonstration.
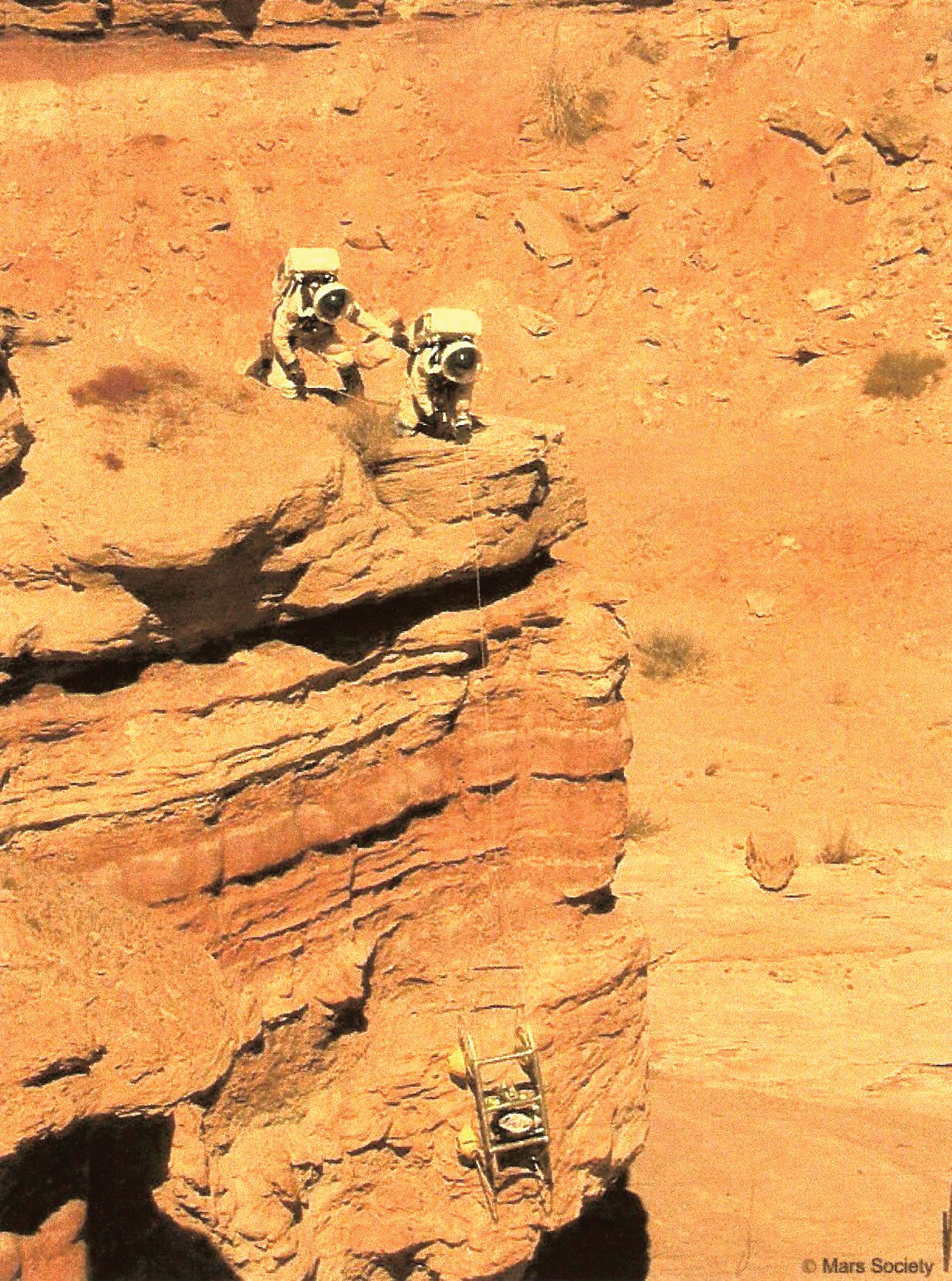
Test 12 (24/02/2002) with two operators in analog space suits in Utah (Courtesy of Mars Society/APM). (Color images available online at
In mid 2002, the vehicle was slightly redesigned (5 cm larger), and a small camera (the Hazcam) was installed on board with a real-time video transmission to a monitor on which the operator could remotely observe the vehicle situation. Tests with this CRV 2 configuration were conducted in November 2002 during the MDRS 7 simulation in Utah (Souchier, 2003a, 2003b).
4. The Vehicle Third Configuration
In 2003, taking into account difficulties encountered whenever the vehicle was brought back upside down (sliding mode) and after one retrieval blockage during the MDRS 7 simulation, a new design concept was formulated. CRV 3 was redesigned as a vehicle with two large-diameter wheels with the instrument platform pendulating freely under the main axis (Fig. 3). As in the previous version, 1 m long rods extended on the left and right sides to avoid a tip-over of the vehicle (avoiding the±90° roll position). But in case of retrieval back from an overhang in an upside-down position, the new vehicle would still be on its wheels. In the process, the mass went down from 8.5 to 4 kg. The first test of the redesigned vehicle occurred in December 2003 in France, and the vehicle was back in use in simulation in Utah afterward for mission MDRS 23 in February 2004 (Pacros, 2004), MDRS 26 in March 2004, MDRS 39/40 in April/May 2005 (Sainte Marie and Pacros, 2005), MDRS 43 in February 2006 (Brulhet et al., 2007; Souchier, 2010), and MDRS 90 in February 2010.

CRV 3 main characteristics during the MDRS 43 2006 simulation mission (Courtesy of APM/A. Souchier). (Color images available online at
During this period of time, the main modification was a change to a one-tether configuration close to the vehicle, with a direct link of the main tether to a semi-rigid rod attached to the vehicle. The transition from one to four tethers was an efficient solution to bring the vehicle back in a 0° or 180° roll position from an overhang, but unfortunately in the case of a very irregular cliff wall, the tether division points could become stuck on a protrusion when going down. This occurred during the MDRS 43 simulation in Utah. A dedicated test was conducted successfully in November 2008 to demonstrate that the new configuration was still efficient to cross up an overhang.
5. Testing Philosophy versus Terrain Configuration
As testing has always been conducted on actual terrain and not on a terrain with artificial obstacles, it is difficult to characterize what type of obstacles the vehicle is able to cross and what type of terrain remains inaccessible. To progress in the configuration efficiency, the philosophy has been to understand what was the cause of a blockage or any type of difficulty (from photos or videos), bring about a configuration improvement, and then test again on the same slope or cliff starting from the same location. Thus, tests 12 (MDRS 2 in 2002), 24 (MDRS 7 in 2002), and 70 (MDRS 43 in 2006) were conducted on the same spot in Utah. Also, tests 29 (MDRS 7 in 2002), 71 (MDRS 43 in 2006), and 78 (MDRS 90 in February 2010) were conducted on the same spot in Utah. In Vernon, France, the same cliff overhang is used to demonstrate the vehicle capabilities.
6. Tests during Austrian Space Forum Simulations
The Dachstein ice cave simulation in April–May 2012 introduced new objectives for the CRV. For the first time, the vehicle would operate on ice or in areas transitioning from rocks to ice. The video data acquisition would focus not only on information on the walls' (icy or rocky) terrain but also on what lies at the bottom of a hole not accessible by humans. For conditions particular to caves, the CRV was fitted with three flashlights to illuminate the main camera (Sciencecam) and Hazcam fields of view (Fig. 4). The vehicle hole floor mapping ability was demonstrated by rotating the vehicle suspended by its tether from a 15 m overhang (Souchier, 2012a, 2012b).

CRV 3 in Tristan Hole in the Dachstein ice cave (Courtesy of OeWF/APM/A. Souchier). (Color images available online at
Until the Dachstein simulation campaign, the only instrument carried by the vehicle was a video camera. The vehicle can, however, carry other instruments to study a slope or a cliff. The Dachstein simulation campaign featured the first use of another instrument other than a camera. A new vehicle designated CRV 5 with a configuration similar to CRV 3, but heavier than CRV 3, was provided by the Planète Mars association to the LATMOS laboratory in order to test a ground-sounding radar. The LATMOS laboratory is developing the ground-sounding radar for the ExoMars European rover, which is programmed for launch to Mars in 2018. CRV 5 was operated on smooth ice slopes, and no terrain difficulties were encountered. An electric winch was used for the tether activation.
For the Austrian Space Forum (Österreichisches Weltraum Forum, OeWF) MARS2013 Morocco simulation campaign, the objectives were as follows:
• Demonstrate the vehicle mobility capabilities on slopes with more or less obstacles and different slope angles. One particular objective for the Morocco simulation was to test the vehicle on very high cliffs (>18 m).
• Assess what the operating difficulties are when the vehicle is activated by an operator who is wearing a space suit.
• Determine how to improve the vehicle's situational awareness. The situational awareness is obtained by the operator by feeling the forces acting on the suspension tether, by visual observation of the vehicle, and through the information transmitted by the onboard video camera. The visual observation may come from the operator, but the direct visual link is often quickly lost when the vehicle is on the slope. On such occasions, the operator may have to stop the operation, tie the tether to the anchoring point, and have a look from another point to see the vehicle. Additionally, someone else may observe the vehicle from a different point and send information to the operator.
• Assess geology interpretation capabilities. This activity is conducted back at base. Eighteen tests were conducted between February 3 and 19, 2013, six of them while the operator was wearing the Aouda OeWF analog space suit.
The results for the different objectives are as follows.
6.1. Slope and cliff mobility objective
During the 18 tests conducted in Morocco, two mobility problems occurred. In one instance, the vehicle was not retrievable on a debris slope because a 40 cm diameter boulder became wedged between the right wheel spokes. But debris slopes are not the type of terrain for which the vehicle was designed. A solution, however, would be to have solid (unspoked) wheels. The present vehicle, which is only a demonstrator, was designed with the requirement of being able to fit in a suitcase for transportation, which precludes the use of solid wheels. Solutions with flexible fabrics, however, are possible, and a new wheel design will have to be considered.
During another test, the vehicle was blocked on its way up a cliff. The experimentation cliff was purposely chosen as very rough to push the vehicle to its limit. In this test, the rod that links the tether to the vehicle (also called the anti-yaw rod) engaged in a crack between two rocks, which gave it a slight S shape (Fig. 5).

Vehicle blockage at the end of test 96. The anti-yaw rod is engaged (and slightly bent) between two rocks. (Courtesy of APM/A. Souchier.) (Color images available online at
In yet another instance, the control tether became fixed in a vertical crack or joint in the cliff face. The vehicle was freed by pulling hard on the tether.
No other mobility difficulties were reported during subsequent tests.
We were successful in testing the vehicle on cliffs of heights >18 m; in fact, the maximum tether length we used was 46 m.
6.2. Operations in analog space suit objective
No special difficulties were encountered that could be linked to the vehicle operations in the Aouda space suits (Fig. 6).

Test 92 by an operator in the OeWF Aouda analog space suit (Courtesy of OeWF/Katja Zanella-Kux). (Color images available online at
6.3. Vehicle situational awareness objective
To improve the operator-vehicle situational awareness, the moveable Hazcam, which sends real-time pictures to the operator, was equipped with a rear-facing mirror. For the Morocco campaign, the Hazcam was oriented downward. As a result, the rear-facing mirror was aimed upward and provided a view toward the upper part of the cliff (Fig. 7). The mirror takes one-fourth of the camera field of view, perhaps not enough to have a clear view of the vehicle's surroundings. Initially, the idea was to equip the vehicle with two Hazcams, one trained upward, the other downward, but this configuration was not implemented for lack of time. A solution whereby the two camera signals could be sent in 5 s alternations to the operator, through only one video channel, would also be interesting.

Image from the Hazcam showing the debris slope with an observer in the upper left corner and the rear-facing (upward) mirror in the upper right corner (Courtesy of APM/A. Souchier). (Color images available online at
However, the Hazcam proved its usefulness by allowing the operator to understand the vehicle motions when the vehicle was out of sight and, in fact, under an overhang in the cliff rock.
For the Morocco MARS2013 campaign, the CRV was equipped with a new HD camera (in the Sciencecam position), and the pictures could be received in real time on a smartphone, which could improve the situational awareness. This capability was not used in Morocco but is available for future experimentation. The introduction of the new camera reduced the mass to 2.4 kg for the Morocco configuration. The 24 N weight would have been 9 N under martian gravity, which would ease the manipulation by the astronaut in a spacesuit. In general, it is estimated that Mars' lower gravity has beneficial effects on the operations by providing a lighter vehicle. Adding to ease for the operator, the low gravity also minimizes the tether wear on rocks. The unfavorable situation is when a blockage occurs when pulling the vehicle upward as was the case in Morocco when the anti-yaw rod that links the tether to the vehicle engaged in a vertical crack in the cliff. In Morocco, the weight of the vehicle was already too low to disengage down by releasing the tether. On Mars, the situation would have been worse. Otherwise, the smaller gravity on Mars does not modify the tip-over angles, for example.
It is interesting to note that, when a boulder became wedged in one wheel's spokes, the situation was not understandable from the Hazcam picture or from the Sciencecam picture (in posttest analysis). Understanding the blockage would have required a lateral viewing camera trained on the right wheel. During the following mobility problem (anti-yaw rod engaged in a crack), the blockage was understood by direct viewing and not by the Hazcam picture. Finally, two 170° field of view cameras would be at minimum necessary.
6.4. Geological interpretation capabilities objective
Interesting results were obtained in geological and terrain analysis in Morocco. Ten years ago, with the previous version of the vehicle, some tests were conducted on clay slopes on the Normandy seaside, in an area called the Black Cows cliffs where a considerable number of fossils from the Jurassic (Oxfordian) and Cretaceous periods are embedded in the ground (third photo in Fig. 1). Numerous fossils are visible on the ground by an observer. But in the camera field of view, which covered only a width of around 20 cm, not so many fossils were visible.
In Utah, during the MDRS simulations, very few fossils were visible in the cliffs on which the tests were conducted, so the geological analysis was limited to cliff vertical cartography by stitching photos extracted from the videos.
During the Morocco campaign, the new HD camera had a 120° field of view (a 170° field of view can also be selected). Numerous fossils were detected in the videos (Figs. 8, 9, 10, 11) and measured by comparison to the two laser spots visible in the field of view and separated by 22.5 cm. Naturally, such fossils are not representative of features that would be found on Mars. Their detection during the Morocco campaign should be considered as a demonstration of the capacity to detect anomalous or particular features on the terrain.

The two laser spots (indicated L green and red) give a dimension reference of 22.5 cm. The fossil (F) size in the middle may thus be deducted at 18 mm (test 93 time 6.41). (Courtesy of APM/A. Souchier.) (Color images available online at

Two imbricated shell fossils (test 94 time 24.42) (Courtesy of APM/A. Souchier). (Color images available online at

Possible indication of fossils (circular shapes) during test 97 (time 3.16); the two laser spots (green and red) separated by 22.5 cm indicate 1.2 cm for the size of the circular shapes. (Courtesy of APM/A. Souchier.) (Color images available online at

Shell fossil in the lower picture part (test 98 time 7.58) (Courtesy of APM/A. Souchier.) (Color images available online at
Also, the Sciencecam video pictures may be assembled into a map of the cliff as shown thereafter (Fig. 12).
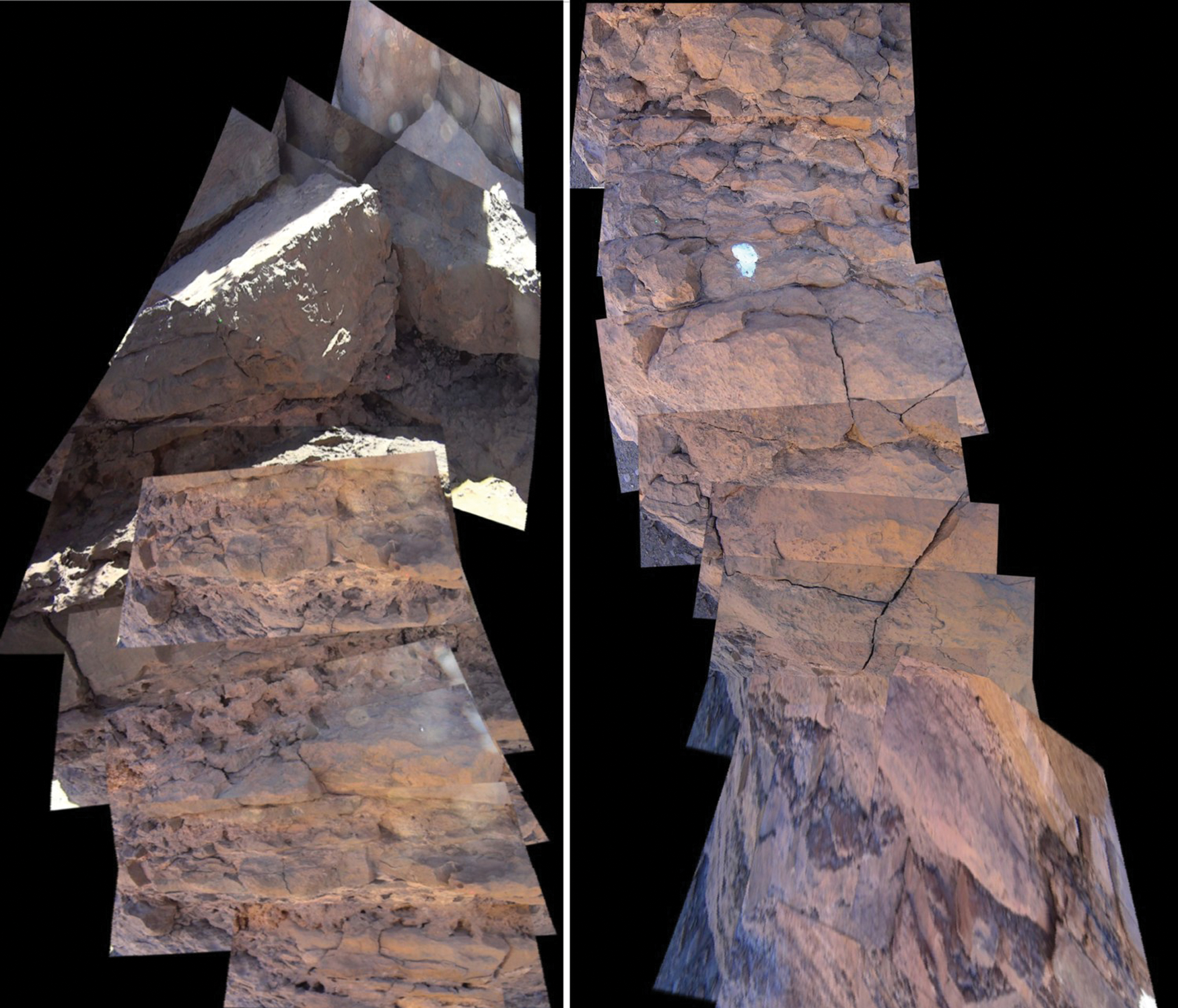
Cliff mapping from the video taken during test 97. The upper part is on the left and the lower part on the right. (Courtesy of APM/A. Souchier.) (Color images available online at
6.5. Other results
On February 18, the operating team discovered a cave with a sky opening in one of the Kess Kess mud mounds and sent the CRV in to explore this cave (Fig. 13). The lateral 1 m anti-yaw rods were not fitted to the vehicle so as to decrease the vehicle width. This operation was a good demonstration of the vehicle capacity to explore an area that is not accessible by an astronaut in a space suit.

One of the Kess Kess mud mounds with a cave featuring a sky opening on the left. CRV 3 entering the cave during test 102 on the right. (Courtesy of OeWF/Katja Zanella-Kux.) (Color images available online at
7. Results
The MARS2013 OeWF Mars exploration simulation campaign has increased practical knowledge of the capabilities of the Association Planète Mars CRV.
Eighteen tests were conducted on the field during MARS2013, including six tests while the operator was wearing the Aouda OeWF analog space suit.
All the tests conducted by the operator in the analog space suit went well and demonstrated that the vehicle can be operated in a space suit in its present configuration, whereas an operational vehicle would probably include ergonomics improvements.
During the first week devoted to experimentation debugging, two mobility problems were encountered, one on a debris slope that was outside the vehicle operating envelope and another on a very rough cliff. All the following tests went well including the tests on high cliffs.
The vehicle has demonstrated that it can access slopes and cliffs that are not accessible to an explorer in a spacesuit. This capability has also been demonstrated in a cave.
CRV 3 could have carried instruments other than a camera during the MARS2013 simulation campaign. For example, considering only the hardware that was available in the field, the vehicle could have carried the methane detectors developed by Jane McArthur from University College London or the L.I.F.E. laser fitted on the ABM Space Education and Mars Society Poland Magma rover. This instrument detects biomarker molecules (chlorophyll and phycoerythrin) by laser resonance signal.
Regardless, during the MARS2013 simulation in which only the camera was on board, probing results were obtained, and posttest analyses showed that small, interesting features such as fossils were easily detected and their dimensions measured, and cliff mappings could be executed.
Footnotes
Acknowledgments
The association wants to thank OeWF and all the contributing organizations including the Moroccan authorities, which made possible this great terrestrial adventure in preparation for future Mars exploration by humankind.
Author Disclosure Statement
No competing financial interests exist
Abbreviations
CRV, Cliff Reconnaissance Vehicle; MDRS, Mars Desert Research Station; OeWF, Austrian Space Forum (Österreichisches Weltraum Forum).