
Abstract
This overview presents the physical principles, design, measurement capabilities, and summary of planned operations of the autonomous detector of radiation of neutrons onboard rover at Mars (ADRON-RM) on the surface of Mars. ADRON-RM is a Russian project selected for the joint European Space Agency-Roscosmos ExoMars 2020 landing mission. A compact passive neutron spectrometer, ADRON-RM, was designed to study the abundance and distribution of water and neutron absorption elements (such as Cl, Fe, and others) in the martian subsurface along the path of the ExoMars rover. Key Words: Mars exploration—Surface—Neutron Spectroscopy—Water. Astrobiology 17, 585–594.
1. Introduction
I
Neutron and gamma spectroscopy observations of celestial bodies are known to depend on the flux of galactic cosmic rays (GCRs) as the primary source of nuclear irradiation. The airless bodies and planets with thin atmospheres are continuously bombarded by high-energy charged particles (primarily protons and alpha particles) of GCR. They produce secondary high-energy neutrons, which are slowed down to a very broad energy range (to epithermal and thermal energies) before leaking out of the subsurface. The observation of the neutron leakage flux can be used to estimate hydrogen and water content. Hydrogen is the best moderator of fast neutrons and it is usually distributed in the planetary subsurface in the form of bound water or water ice.
Neutron spectroscopy can also detect the presence of strong neutron absorbers, which include trace elements such as Gd and major elements that constitute soil, such as Cl, Fe, Ti, and others (for details, see also Section 4).
The ExoMars rover, which is currently scheduled to launch in 2020, will carry the compact passive neutron spectrometer autonomous detector of radiation of neutrons onboard rover at Mars (ADRON-RM) to the equatorial region of Mars as part of the mission's science payload. The main science objective of the ExoMars mission is dedicated to understanding the evolution and habitability of Mars. This strategy includes the search for possible past and present biosignatures of martian life and characterization of water and geochemical distribution by way of a sophisticated drilling system designed to investigate the shallow subsurface to a depth of 2 m. At completion of this mission's landing site selection, four candidates—Aram Dorsum, Hypanis Vallis, Mawrth Vallis, and Oxia Planum—were under consideration. These landing sites exhibit evidence of a complex aqueous history in the past and provide a reasonable compromise between the achievement of scientific goals and issues that have to do with engineering requirements. All the proposed locations offer an opportunity to investigate numerous scientific targets of interest within a several-kilometer drive of the proposed landing site; this is an expected traverse distance that will constitute the primary portion of the mission. Recently, the Oxia Planum was selected as the primary choice, with Aram Dorsum and Mawrth Vallis as backup options. Oxia Planum is a 3.9 billion-year-old clay-rich region located within a valley system of outflow channels where varying compositions of rock and sedimentary deposits related to past warm and wet environments are exposed.
The ADRON-RM instrument is under development at the Space Research Institute, Moscow, Russia, under contract with the State Corporation Roscosmos and will be contributed to the joint European Space Agency (ESA)-Roscosmos ExoMars mission by Roscosmos. While onboard the rover, ADRON-RM will measure the spatial variability of neutron flux emitted from the martian surface. The data processing procedure will convert the raw data into an estimation of bulk water distribution and abundance of neutron absorption elements, initially chlorine and iron. The instrument will also provide continuous monitoring of the neutron component of the radiation background and expand our knowledge about Mars' surface radiation, which will inform with regard to future human missions to the planet. In this study, we present this experiment's primary scientific goals (Section 2), a detailed instrument description (Section 3), and instrument measurement capabilities (Section 4).
2. Scientific Goals
Investigations performed by various space missions over the past decade have revealed a complex mineralogical and aqueous history of Mars, which could be associated with habitable environments (see, e.g., Squyres et al., 2004, 2012; Bibring et al., 2006; Bell, 2008; Grotzinger et al., 2013, 2015). This has prompted the implementation of two instruments for the 2020 ExoMars mission—the passive neutron spectrometer, ADRON-RM, onboard the ExoMars rover and the active gamma and neutron spectrometer, ADRON-EM, onboard the ExoMars stationary landing platform—the primary goal of which will be to measure water distribution in the martian subsurface. We expect that ADRON-RM/ADRON-EM measurements in synergy with other ExoMars instruments will advance our understanding of geological and geochemical processes that have been at work on Mars, as well as the aqueous history and past and present climate of the planet.
The main objectives of the ADRON-RM scientific investigation include following measurements and activities: • Measurement of the distribution of bulk hydrogen content (in the form of free or bound water) at the stationary platform location and along a rover traverse; • Evaluation of the bulk composition of major soil neutron absorption elements (Cl, Fe, S, Ti, etc.) at the stationary platform location and along a rover traverse; • Monitoring of the neutron component of the natural radiation background and estimation of neutron radiation dose at the martian surface from GCRs and solar particle events (SPE); • The potential to monitor seasonal changes of the neutron environment due to variations of atmospheric and subsurface properties. The mission duration is currently limited to slightly more than 200 sols on the surface, which will provide the potential to observe at least one transition between two seasons. If the rover survives beyond its estimated lifetime at the surface, it could potentially offer full coverage of the martian seasons.
Depending on the final configuration of the ExoMars rover, ADRON-RM will participate in joint analyses (optimally starting from the ground calibrations) with other instruments. Currently, the science team expects that data from the ADRON-RM instrument will be used in combination with data from the WISDOM instrument (Ciarletti et al., 2009, 2015). WISDOM is a ground-penetrating radar that will provide a detailed view of the martian shallow subsurface structure by sounding the upper layers of its crust down to 3 m (Ciarletti et al., 2015). Joint analysis of ADRON-RM and WISDOM data will contribute to a reconstruction of the subsurface water distribution and detection of hydrated minerals. Data from these instruments can be used for the selection of optimal sites for the drilling operations and sample collection from varying depths.
The ExoMars landing configuration comprises a stationary landing platform and rover. At the first stage of the surface mission, the ADRON-RM will be used to provide simultaneous observations in conjunction with instrumentation integrated onboard the stationary landing platform. We plan to operate ADRON-RM along with an active gamma and neutron spectrometer—ADRON-EM (onboard the landing platform). The monitoring of variations in induced DAN produced by an active gamma and neutron spectrometer will serve to derive more details on subsurface properties at the landing site, such as elemental composition, water, and density profiles.
We expect that ADRON-RM investigations, in combination with DAN studies onboard NASA's Curiosity Rover, will continue in situ water distribution measurements and improve enhanced global Mars water distribution maps through the comparison with past and present orbital measurements. This will provide synergy with neutron and gamma spectrometry onboard Mars Odyssey (Boynton et al., 2002, 2006; Feldman et al., 2002, 2011; Mitrofanov et al., 2002; Litvak et al., 2006; Maurice et al., 2011), which has mapped the surface of Mars with a resolution of 300 × 300 km, and will include new orbital collimated neutron measurements onboard ESA Trace Gas Orbiter (FREND instrument, currently in orbit around Mars) with a resolution of 40 × 40 km (Malakhov et al., 2014). Surface missions on Mars, including MSL, ExoMars, and possibly Mars 2020, will support orbital mapping with ground truth measurements of water abundance at multiple locations at Mars' equatorial region.
3. Instrument Description/Accommodation/Surface Operations
The ADRON-RM is designed as a single unit (Fig. 1). The principles and design are inherited directly from the DAN instrument onboard NASA's 2011 MSL Rover mission (see Litvak et al., 2008; Mitrofanov et al., 2012). DAN consists of two separate units integrated at the two sides of the rover: a pulsed neutron generator (DAN/PNG) and detector element (DAN/DE). DAN can be operated both in active and in passive modes of measurements. In active mode, the DAN/PNG produces 2-μs pulses of high-energy (14.1 MeV) neutrons emitted into the 4π steradian around the DAN/PNG. In passive mode, the DAN/DE measures neutron albedo from the subsurface, which is produced by the rover multimission radioisotope thermoelectric generator (MMRTG) and GCRs.
Three-dimensional visualization of ADRON-RM instrument. ADRON-RM, autonomous detector of radiation of neutrons onboard rover at Mars.
Thus, ADRON-RM is a reproduction of the DAN instrument, but only in part; the ADRON-RM design includes significant modifications implemented to reduce the instrument's mass to the required ∼1.7 kg mass budget. In addition, ADRON-RM will measure only neutrons albedo of the surface produced by GCRs due to the fact that the ExoMars rover uses solar panels for energy generation, which makes the passive data analysis of ADRON-RM easier than was the case for DAN.
Following the DAN/DE design, ADRON-RM uses two 3He proportional counters, which were manufactured by LND, Inc. (New York). The counters are 25 mm in diameter and 55 mm in total length (with an active length of about 25 mm). A counter is filled with 3He gas under 4 atmospheres of pressure. The detector configuration is selected to measure neutron flux produced in the subsurface by the GCR in different energy bands such that it can resolve the subsurface neutron leakage spectrum from thermal energies (<0.4 eV) up to ∼1 keV. The measurements of the neutron leakage spectrum will be used to determine water distribution and the presence of neutron absorption elements and monitor the neutron component of the martian radiation background (for details, see also Section 4). Each proportional counter detects neutrons through the neutron capture reaction 3He+n->3H+p. The first neutron detector (counter of epithermal neutrons or CETN) is a proportional counter wrapped in a cadmium enclosure. Cadmium has a very high absorption cross section for neutrons with <0.4 eV. For CETN, it allows for the detection of low-energy epithermal neutrons above the cadmium threshold in the energy range from 0.4 eV up to 1 keV. The variations of epithermal neutron flux (along the rover traverse) are mainly produced by changes in subsurface hydrogen distribution (primarily in the form of bound water), for details, see Section 4.
The second neutron detector (counter of thermal neutrons or CTN) is another proportional counter, which is only partially wrapped in the cadmium enclosure. Experience acquired during MSL's Curiosity surface operations made it clear that a significant part of thermal neutrons can be produced not only in the subsurface under the rover but in rover structures as well. To reduce this background for the next generation of neutron spectrometers, a narrowing of the field of view was proposed by covering the bare proportional counter with partial cadmium shielding that would leave an open window, under the rover, oriented toward the surface. This detector is sensitive to the thermal and epithermal neutrons, but its selected configuration suppresses the detection of thermal neutrons from practically all directions (including major rover structures) except for the solid angle looking to the ground beneath the rover. Because of this, the difference in the counting rate between the CTN and CETN counters will be produced by surface thermal neutron flux in the energy range below 0.4 eV. Thermal neutrons are sensitive both to the changes in water distribution and the presence of neutron absorption elements (see Section 4 for more details).
For each detector, the ADRON-RM electronics accumulate 32-channel spectra. Signal and data processing are provided by digital electronics and a low/high-voltage board that is accommodated inside the unit. The ADRON-RM digital electronics also provide the support of the telemetry and commanding interface between the instrument and the ExoMars rover computer element.
The ADRON-RM instrument's telemetry is structured as three different types of telemetry frames. The first one is used for standby mode and contains service and housekeeping information only. The second type of telemetry frame is used for the passive operation mode to record service and housekeeping information together with the science spectral data (measured as two 32-channel spectra in each neutron detector). It will be used as a primary observational mode during rover traverse. The accumulation period for these data frames is 20 s by default, but can be changed from the ground in accordance with science purposes. The third type of telemetry frame adds time resolution to the measurements in the passive mode by recording information (arrival time and spectral channel, unofficially called neutron word) about each neutron registered in the instrument detectors. This mode will be operated in the vicinity of the landing platform for joint operations with the active neutron and gamma spectrometer ADRON-EM to monitor dynamic albedo (at different locations around landing platform) induced by ADRON-EM.
The instrument has no permanent internal memory. The data frames will be recorded and immediately transmitted from the instrument to the rover computer. This means that all ADRON-RM measurements will be performed only when the Rover Compute Element is awakened (∼it could be shortened to 6 h per martian sol).
A summary of the main ADRON-RM parameters is presented in Table 1.
CETN = counter of epithermal neutrons; CTN = counter of thermal neutrons.
ADRON-RM is accommodated inside the ExoMars rover body at the rear balcony. The height above the surface is ∼0.8 m. The instrument is mounted on the special standoffs for thermal isolation. To keep the instrument within a required operational temperature range, from −40°C up to +50°C, ExoMars provides a thermal strap to connect rover's internal heat sources with a chassis of the instrument.
In accordance with instrument telemetry options, ADRON-RM operations will use passive and time-resolution passive measurements/modes. As mentioned above, all time-resolution passive measurements will be conducted together with ADRON-EM (Golovin et al., 2014). ADRON-EM will use the same flight model of PNG as was implemented in the DAN experiment. DAN spatial resolution is a circular area with a radius of about 1.5 m (Sanin et al., 2015). This corresponds to the instrument configuration where PNG and neutron detectors are separated in space by 1-m distance. We expect that during initial surface operations, the closest distance between the ADRON-RM detectors and PNG on the landing platform could be set up as close as 1 m. The PNG of ADRON-EM will emit neutron pulses with a selected frequency and irradiate the martian subsurface to produce a dynamic albedo of epithermal and thermal neutrons, which will be detected both by ADRON-EM and ADRON-RM. In this combination, ADRON-RM will monitor how dynamic albedo will decay with rover departing from the platform and test the density and inhomogeneity of the surrounding area. It is expected that this mode will be used during a restricted period of time while the rover is in the vicinity of the landing platform. Moving away and to much further distances will significantly decrease the measured signal in the ADRON-RM detectors. Numerical simulations and preliminary ground tests have shown that at a 3-m distance, the neutron count rate drops by a factor of 10 (which is still appropriate for the measurements) and that a 10-m distance presents an absolute boundary where the signal decreases by a factor of 100 and a significantly increased amount of time will be required to accumulate appropriate statistic of counts.
Routine passive measurements will shape the primary ADRON-RM surface operation plan, which will be implemented during the rover traverse to monitor water distribution, detect the presence of neutron absorption elements, and monitor the neutron radiation background. During strong SPE, ADRON-RM will monitor its temporal evolution (up to several days) and estimate the neutron radiation dose.
4. Instrument Measurement Capabilities
The main science capability of the ADRON-RM instrument is to measure natural neutron background at the surface of Mars, which is produced by GCRs in the martian subsurface, and monitor induced neutron flux generated by the active neutron and gamma spectrometer ADRON-EM integrated into the onboard ExoMars lander platform. The neutron environment at the surface of Mars depends on various factors, including GCR energy spectrum, composition, and column density of the atmosphere and elemental composition of the martian regolith. GCRs are energetic charged particles (mostly protons and alphas, ∼99%) that originated outside the solar system and have accelerated to very high energy while traveling through the interstellar medium. Typical energies of GCRs can be in the range of 0.1 MeV/nucleon to 10s GeV/nucleon near Earth and Mars orbits.
The high-energy GCR particles enter the martian atmosphere and initiate nuclear cascade interactions (called spallation or fragmentation) with the nuclei existing in the Mars atmosphere, which creates a number of secondary particles such as neutrons, pions, and muons. These secondary particles along with the surviving primary particles travel further down to the surface of Mars and interact with the surface material (soils, rocks, regolith, etc.). Typical characteristic depths of GCR interactions with the surface material are ∼200 g/cm2.
In the subsurface, charged particles produce fast neutrons that scatter through the subsurface material as they lose their energy. These neutrons interact with soil nuclei and trigger nuclear reactions and leaking from the subsurface back to space. The presence of hydrogen significantly influences the neutron leakage spectrum due to effective neutron moderation and final thermalization through collisions with hydrogen nuclei. As a result, the variations of neutron flux detected onboard a rover in different energy bands correlate with subsurface hydrogen/water abundance. Thus, to restore hydrogen/water content, it is necessary to model a surface experiment and evaluate how neutron counting rate changes for different hydrogen concentrations.
All factors that affect the neutron count rates in instrument detectors should be properly modeled in this approach. This means that numerical simulations should include a model of the GCR environment, models of atmospheric and surface material elemental composition, and a model of the rover structure as well. Examples of such simulations are described in the works of Jun et al. (2010), Sanin et al. (2015), and Tate et al. (2015) who included a Monte Carlo radiation transport code called MCNPX (see, e.g., McKinney et al., 2006; Pelowitz, 2011) that has been used with representative atmospheric and soil composition models and taken into account rover structure.
We used this experience along with that gathered in other orbital and surface missions to evaluate ADRON-RM measurement capabilities and model this experiment onboard the ExoMars rover. Following this approach, the combination of data from two neutron detectors is used in a model-dependent data deconvolution where the observed counting rates (in each detector) will be modeled, thus accounting for the detector response functions, rover composition and structure, and different models of martian subsurface. In the simplest numerical models, the martian subsurface could be modeled with several parameters such as bulk content of water, bulk content of neutron absorbing elements, and bulk density. In more complicated models, the subsurface is usually described with a different layered structure of water depth distribution (i.e., the water contents in different subsurface layers). By using minimization procedures, key model parameters (most importantly, bulk water content) can be defined, which would provide the best fit correspondence between the observed and modeled counts in all detectors (Litvak et al., 2014; Litvak, 2015; Mitrofanov et al., 2014; Sanin et al., 2015).
Numerous studies performed with the DAN instrument have shown that at the vicinity of the MSL landing site at Mars' equatorial latitudes, significant variability both in bulk concentration of subsurface water and in an equivalent concentration of chlorine can be expected. Chlorine is considered in this approach to be a major soil element constituent with a high neutron absorption cross section that represents an average concentration of all neutron absorption elements (Mitrofanov et al., 2014).
Measurement capabilities of ADRON-RM can be evaluated through DAN passive data processing if it is taken into account that major source neutrons onboard ExoMars rover come from the GCRs. DAN measurements in the passive mode (same mode of measurements as implemented for ADRON-RM instrument) strongly depend on the MMRTG power system (autonomous source of electricity and heat based on decay of natural radioactive isotope). It generates considerable neutron and gamma background in a wide energy range. This source is so strong that it dominates above GCR neutron flux (up to 4–6 times higher than neutron flux produced by GCRs). The ExoMars rover neutron background is much smaller because its primary electricity will be generated by solar panels (like Mars Exploration Rovers) and only small radioisotope heat units (RHUs) will be used to provide thermal stabilization of the entire system. This configuration generates at least 100 times less neutron background and, in accordance with the instrument requirements, will be located at 300–600 mm away from ADRON-RM. As a result, the GCR neutrons will dominate in an ADRON-RM measured signal.
Using DAN numerical models (density and elemental composition of the martian subsurface and atmosphere, assumptions about rover structure, flux of GCRs), which were adapted to the ADRON-RM design (configuration, differences in neutron detectors, properties of RHUs), we estimated the variability of epithermal neutron signal measured by the ADRON-RM CETN detector as a function of varying water abundance in the subsurface. Figure 2 shows how a normalized counting rate measured by CETN changes with average subsurface water. The normalization condition (count rate equal to 1) was selected for the water content with 2.5% and chlorine with 1.1% (average abundance measured by DAN at Gale crater). It can be seen that the CETN count rate is quite sensitive to water concentration. It increases more than two times if the water concentration decreases from 2% to a very dry subsurface (such low values were observed at Gale mainly at dunes) and decreases more than two times if water concentration increases from 2% to 10% (highest values observed at Gale so far at the locations with traces of past aqueous activity and with enrichment of hydrated minerals, see Mitrofanov et al., 2014). On the other hand, an epithermal count rate does not significantly depend on the variability of the abundance of neutron absorption elements. This is illustrated in Fig. 2 by comparison of the CETN signal modeled for the different chlorine compositions. So, we can conclude that the CETN count rate will be a good indication of H concentration in the martian subsurface, and the curve shown in Fig. 2 could be used as the water sensitivity curve of ADRON-RM.
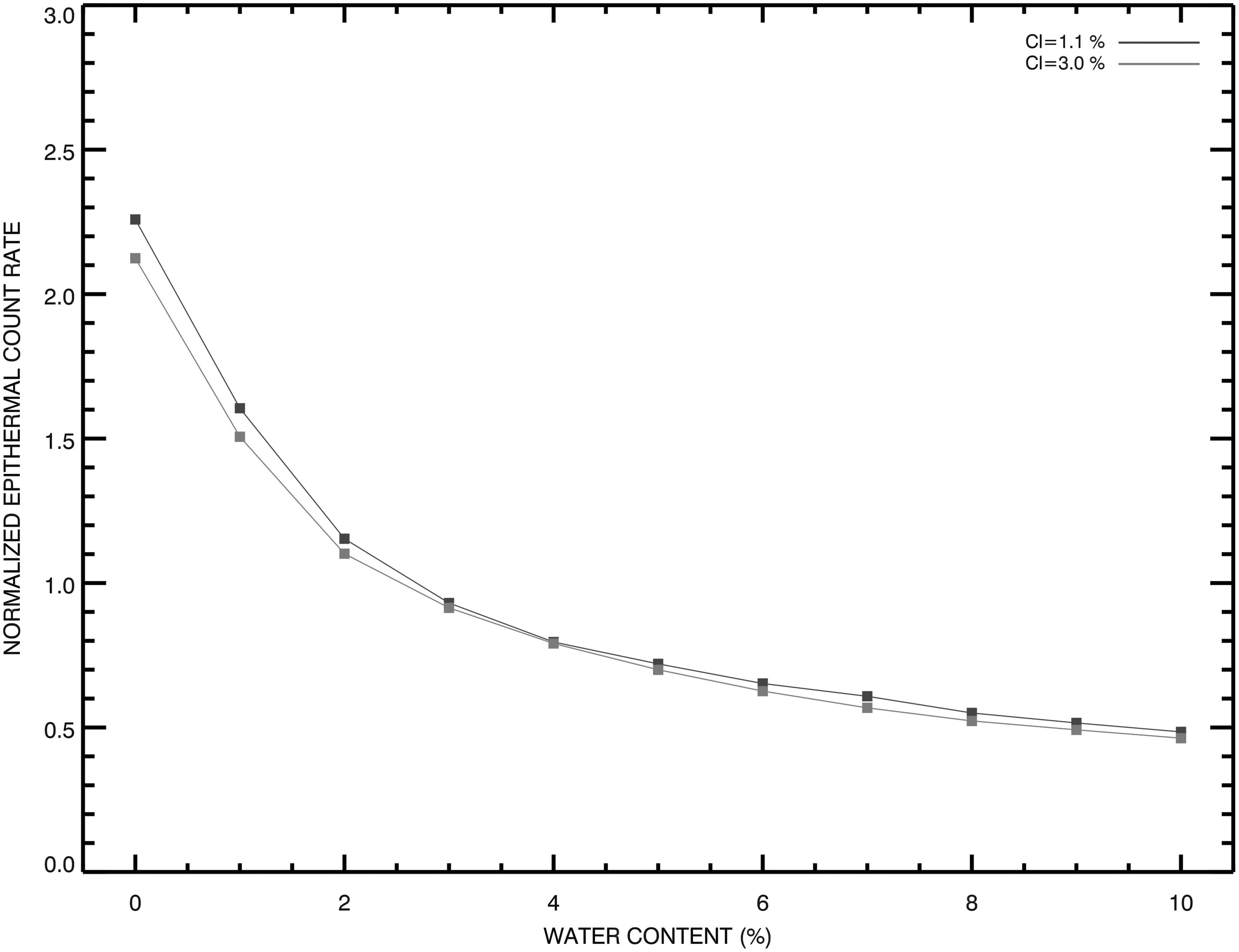
The epithermal neutron count rate modeled in ADRON-RM CETN detector versus different concentrations of water and chlorine. CETN, counter of epithermal neutrons.
The slope of the water sensitivity curve (Fig. 2) can be used to estimate the required time of measurements to detect the water equivalent hydrogen with a required accuracy. Thus, to detect the content of H beneath the rover with accuracy of 0.1% by mass fraction at the level of 3σ (three standard deviations), it is necessary to continue ADRON-RM measurements at least for 2 h, which can be accomplished at the long duration stops of the rover. The requirement to detect variations of water content with a lower accuracy of 0.5% or 1% can be fulfilled during much shorter stops or even while driving (required time is 2–10 min).
The first ADRON-RM measurements will be done near the stationary landing platform together with operation of the active neutron and gamma spectrometer. This means that the initial normalization to the absolute values of water abundance will be set up from joint analysis of active and passive observations (as is used onboard the MSL Curiosity Rover, see, e.g., Sanin et al., 2015; Tate et al., 2015).
Another possibility for testing the elemental composition of the martian subsurface comes from the analysis of CTN count rates. Numerical modeling has demonstrated that variations of thermal neutrons (the difference between count rates measured by CETN and CTN detectors) do not show significant dependence from variations of hydrogen, but revealed a strong correlation with chlorine abundance (Fig. 3). The thermal count rate changes about twofold, while the concentration of chlorine in the subsurface changes sixfold from 0.5% to 3%. This dependence can be used to evaluate variability of neutron absorption elements (chlorine concentration will characterize an equivalent concentration of all neutron absorption elements) along the rover traverse.
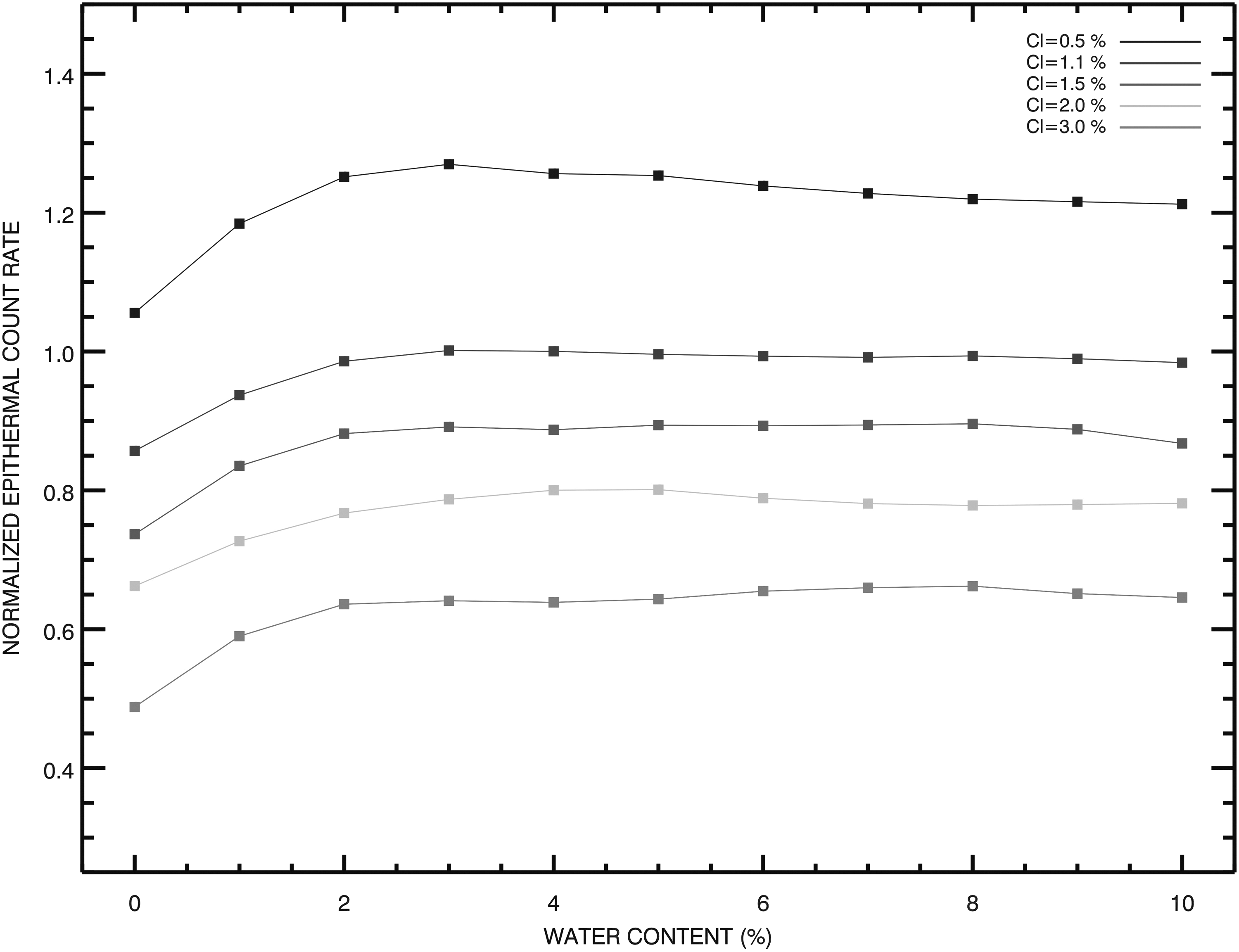
The thermal neutron count rate modeled in ADRON-RM detectors (difference in count rates between CTN and CETN detectors) versus different concentrations of water and chlorine. CTN, counter of thermal neutrons.
Figure 4 presents the modeled data that show how the ratio between epithermal and thermal count rates changes versus chlorine concentration in the subsurface for the different abundance levels of water. Taking into account that water concentration during surface observations could be derived from CETN data analysis (described above), this plot can be used to estimate the chlorine concentration from the measured ratio between count rates derived from the CTN and CETN detectors and independently measured content of water.
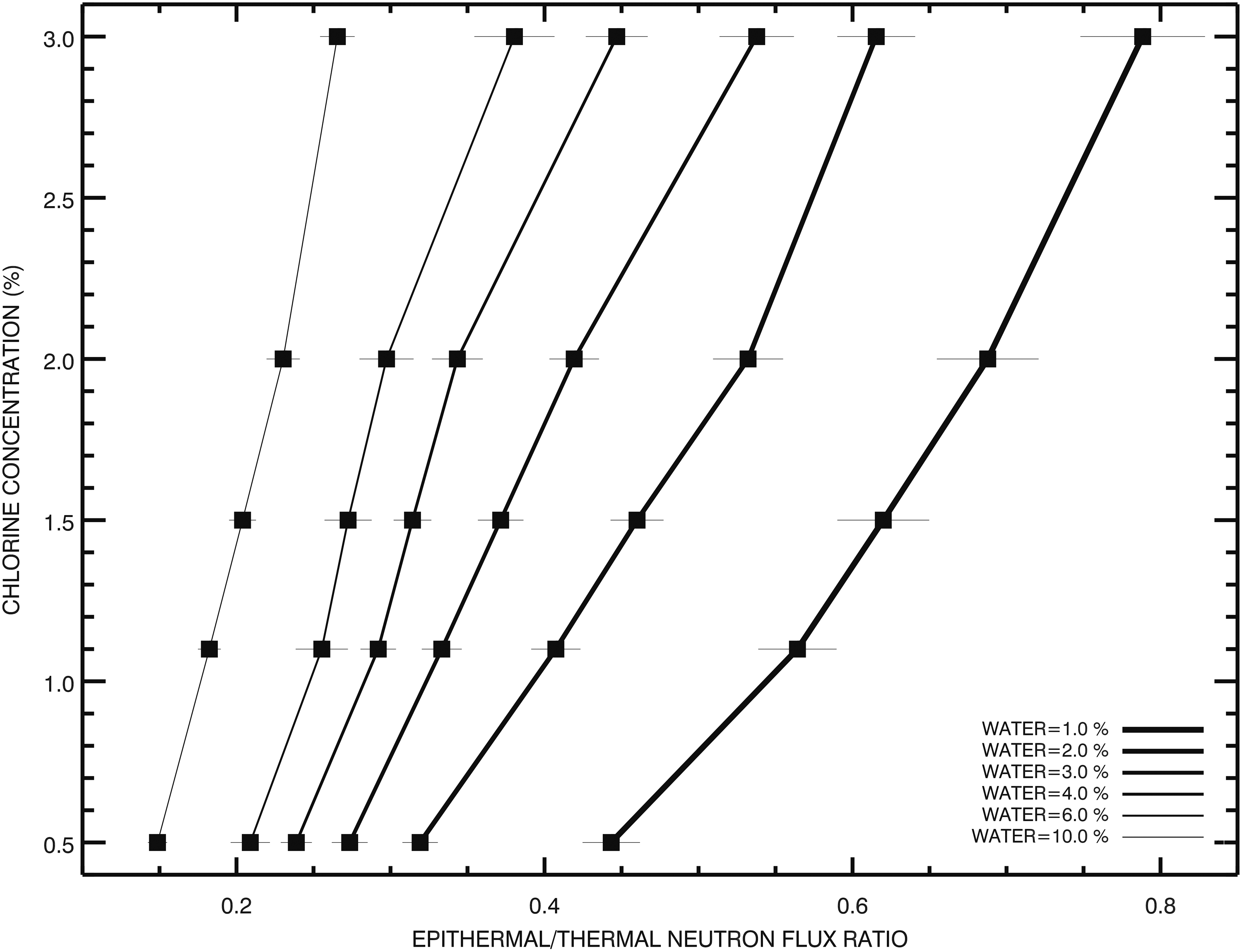
The modeled ratio of epithermal and thermal counts versus different concentrations of water and chlorine.
All the measurement capabilities, as presented above, correspond to the main mode of ADRON-RM operations, which is when the spectra of detected counts are accumulated during different time intervals (the minimal duration is selected as 20 s). This mode will be used during motion and at places where the rover is far away from the stationary landing platform. The mode of time-resolved measurements will be used to detect each count at each sensor, as the so-called count/neutron word, when the energy channel and detection time will be recorded in the telemetry frame, as the single 9-byte word. The data at this mode allow for construction of time profiles of DAN both for the CETN and CTN sensors, which follow moments of neutron pulse from the neutron generator onboard the stationary platform. This mode of measurements is similar to active measurements of DAN, but in the case of ADRON-RM, the moments of radiated neutron pulses will be determined experimentally, as the regular sequence of high-amplitude counts with the frequency of the neutron generator. With increasing distance from the lander, the amplitude of these counts decreases, and at some critical distance of about 10 m, the detection of pulses from the generator will not be possible.
The operations of ADRON-RM in time-resolved mode should be done in conjunction with active operations of ADRON-EM at the stationary landing platform. This allows for the measurement of time profiles of postpulse emission of thermal and epithermal neutrons from the subsurface at different surface locations around the lander platform. Analyzing DAN/Curiosity observations, Mitrofanov et al. (2014) and Sanin et al. (2015) revealed that water distribution, chlorine abundance, and soil density are the major factors/parameters that may influence measured subsurface neutron albedo. They also proposed the model-dependent deconvolution with which to estimate these parameters. For ExoMars surface operations, if water and chlorine abundance is constrained from the individual ADRON-EM and ADRON-RM observations, this will reduce the number of free parameters of the considered soil model, and then joint ADRON-EM and ADRON-RM observations with variable distance between them could provide more conclusive data about inhomogeneity and density profiles.
5. Conclusions
The ADRON-RM experiment is the next implementation of nuclear methods for the exploration of solar system planets and their surfaces. In this particular case, a compact passive neutron spectrometer will be integrated onboard the martian rover developed by ESA as part of a joint ESA-Roscosmos ExoMars mission scheduled for launch in 2020. Our investigation summarizes the ADRON-RM instrument capabilities for measuring subsurface water and the concentration of Cl (and other neutron absorption elements) along a rover traverse. The instruments here have a high degree of heritage from the surface instrument DAN, which is currently operating onboard the MSL Curiosity Rover, and allow for the detection of subsurface water and chlorine concentrations with accuracies as low as 0.1%.
Footnotes
Acknowledgments
The science investigations, data analysis, modeling, and interpretations performed in this work are partially supported by grant no. 14-22-00249 from the Russian Science Foundation. The authors of the article are also thankful to colleagues from the DAN/MSL team and the ExoMars project for their essential help, fruitful discussions, and valuable comments. Part of the research was carried out at the Jet Propulsion Laboratory, California Institute of Technology, under a contract with the National Aeronautics and Space Administration.
Author Disclosure Statement
No competing financial interests exist.