
Abstract
The shallow subsurface of Mars is extremely interesting as a possible microbial habitat because it becomes temporarily wet, it is shielded from radiation, and mixing by aeolian processes could provide the sources of energy and nutrients necessary for sustaining microbial life in it. The Modern Aqueous Habitat Reconnaissance Suite (MAHRS) was developed primarily to search for potentially habitable environments in the shallow subsurface of Mars and to study weathering, but it can also be used to search for potentially habitable environments in the shallow subsurface of other planetary bodies such as the Icy Worlds. MAHRS includes an instrument developed to measure regolith wetness and search for brine in the shallow subsurface of Mars, where it is most likely to be found. The detection of brine can aid in our understanding not only of habitability but also of geochemistry and aqueous weathering processes. Besides the regolith wetness sensor, MAHRS includes an electric field sensor, an optical microscope, and a radiometer developed to characterize the near-surface environment and study mixing by aeolian processes. MAHRS was designed to aid in the selection of optimum areas for sample collection for return to Earth.
1. Introduction
Habitability is defined as the potential for an environment to support life, on scales ranging from microscopic to planetary-wide. The habitability of an environment depends on the presence of three main ingredients: (i) a solvent capable of supporting complex biochemistry (e.g., Siegel et al., 1979; Marion et al., 2003); (ii) a source of energy for creating and maintaining complex molecules, structures, and pathways which life depends on (e.g., Hoehler, 2004); and (iii) nutrients and raw materials for biosynthesis (e.g., Wackett et al., 2004). In addition, these ingredients must be available within environmental conditions amenable to the assembly, stability, and interaction of complex structures and molecules (e.g., Pappalardo et al., 2013; Rummel et al., 2014).
Assessments of habitability have focused to a large extent on determining whether liquid water has been present on planetary bodies (e.g., Rummel et al., 2014). However, microbial survival also depends critically on water activity (a w), temperature (T) and other factors such as the composition of the solute of the aqueous solution potentially hosting microbes. On Earth, metabolic activity has been detected at temperatures as low as about T ≈ 240 K and at water activity as low as a w ≈ 0.6 (e.g., Rummel et al., 2014). The fact that Mars is an extremely cold and dry planet in comparison with Earth poses major constraints on habitability. But the fact that terrestrial microorganisms are known to adapt to low temperature and low water activity suggests that the conditions limiting habitability on Earth could be relaxed when studying the habitability of other worlds.
The lowest temperature at which concentrated aqueous saline solutions (brines) freeze is known as eutectic temperature T E, while the solution with this minimum freezing temperature is known as eutectic solution. The eutectic temperature of a solution and the solution's water activity a w(T E) at this temperature depend on the solution's composition; for example, complex natural NaCl-rich solutions such as terrestrial seawater remain partially liquid down to temperatures of about T E ≈ 230 K and water activity a w(T E) ≈ 0.7 (e.g., Koop et al., 2000), while calcium perchlorate solutions remain liquid at temperatures as low as T E ≈ 199 K (e.g., Pestova et al., 2005; Hecht et al., 2009; Rennó et al., 2009; Fischer et al., 2014) and a w(T E) ≈ 0.5 (e.g., Rivera-Valentín et al., 2018).
Liquid brine inclusions form ubiquitous habitable channels in terrestrial sea ice (e.g., Junge et al., 2001). They form when saline water is cooled below the freezing point temperature of pure water. This is interesting because brine inclusions likely exist on Mars and the Icy Worlds. Indeed, ice precipitates from diluted solutions when they are cooled, increasing the solutions' concentration, while salt precipitates when concentrated solutions are cooled, decreasing the solutions' concentration (Wankat, 1973). Thus, natural climate cycles drive the concentration of saline solutions toward their salts' eutectic value (e.g., Rennó et al., 2009).
The Phoenix mission discovered salts, most likely liquid brine, and ice at its landing site on Mars' polar region (Hecht et al., 2009; Rennó et al., 2009; Smith et al., 2009; Cull et al., 2010; Fischer et al., 2014, 2016). Indeed, perchlorate salts with extremely low eutectic temperatures were found not only at the Phoenix landing site (Hecht et al., 2009) but also at Gale Crater on Mars' equatorial region (Glavin et al., 2013), suggesting that perchlorate salts are ubiquitous on Mars (Kounaves et al., 2014).
The freezing of brine likely produced the soft ice found by Phoenix in the shallow subsurface of Mars (Rennó et al., 2009; Cull et al., 2010). Subglacial water found trapped below the ice of Mars' southern polar cap must also be briny (Orosei et al., 2018). Since halophilic organisms thrive in terrestrial brines (Boetius and Joye, 2009), even at subfreezing temperatures (Siegert et al., 2001; Mikucki et al., 2009), brines could form habitable environments on Mars. In addition, brine inclusions in radiation-shielding icy layers could lead to the formation of habitable conditions on Europa and other Icy Worlds.
Brine formation by the direct contact of water ice with salts such as Ca(ClO4)2 is the mechanism most likely to produce liquid water within Mars' current diurnal cycles (Fischer et al., 2014). It is likely that perchlorates have been deposited at the Phoenix landing site by atmospheric processes (Catling et al., 2010) and concentrated into patches at the surface and in the shallow subsurface by freeze-thaw cycles (Rennó et al., 2009). These patches could form temporarily habitable environments (Fischer et al., 2016). Since Ca(ClO4)2 changes phase at similar environmental conditions as salt mixtures closely matching the individual cation/anion concentrations found in the regolith of the Phoenix landing site on Mars' polar region (Nuding et al., 2014), they are excellent analogs for studying aqueous processes on Mars.
McEwen et al. (2011) postulated that aqueous processes produce narrow dark features named recurring slope lineae (RSL) on present-day Mars. Ojha et al. (2015) found direct evidence that the amount of hydrated salts observed around RSL increases when they become active. More recent results indicate that RSL are likely granular flow on deep slopes (Dundas et al., 2017), as posited by Martínez and Rennó (2013) based on thermodynamic arguments. Thus, the granular flow causing RSL is likely triggered by changes in the hydration state of salts present in the martian regolith. This is interesting because it suggests that aqueous processes might be currently active even at relatively warm, low-latitude, areas of Mars.
A diverse array of terrestrial microorganisms thrives in brines, even in subglacial and deep seafloor habitats that lack sunlight (Thomas and Dieckmann, 2002; Boetius and Joye, 2009; Mikucki et al., 2009). The discovery of sulfur and iron cycling microbial communities in the subglacial brine that episodically drains from Taylor Glacier in Antarctica's Dry Valleys (Mikucki et al., 2009) is particularly relevant to the understanding of the habitability of Mars. Boetius and Joye (2009) describe these hypersaline habitats and the microorganisms that inhabit them. Here, we summarize recent discoveries that shed light on our understanding of the habitability of Mars and the Icy Worlds.
The discoveries of life in saline aquifers, deep-sea brine pools, and ancient subglacial brine reservoirs (Biddanda et al., 2009; Green and Lyons, 2009; Joye et al., 2009; Mikucki et al., 2009) have expanded our understanding of life in extreme environments. The cycling of iron, methane, and sulfur in highly saline habitats in the absence of sunlight highlights the metabolic flexibility of extremophiles (e.g., Boetius and Joye, 2009). The halophilic algae Dunaliella salina, a member of a class of microorganisms first discovered in the Dead Sea (Fig. 1, left) (Baas-Becking, 1931; Wilkansky, 1936; Oren, 2008), survives in brines with more than 20% salt content (Boetius and Joye, 2009). Halophilic microorganisms have been isolated from Dead Sea samples more than 50 years after their collection, indicating an extremely low mortality rate in highly saline environments (Arahal et al., 1996).

Halophilic microorganisms thrive in brines. (
The extremely halophilic archaeon Haloquadratum walsbyi discovered in a Red Sea salt pond (Walsby, 1980) that floats in sunlit nutrient-rich brines (Fig. 1) has been cultivated in the laboratory. Halophilic organisms with salt-adapted enzymes are found in many branches of the tree of life, including archaea and bacteria, suggesting either that adaptation to saline environments occurred numerous times or that lateral gene transfer occurred during their evolution.
Mud volcanoes, brine lakes, and anoxic basins exist in the seafloor of the Black Sea, the Red Sea, the Mediterranean Sea, and the Gulf of Mexico (Fig. 2, left). These seafloor brines form when subsurface fluids encounter ancient, buried salt deposits (e.g., Boetius and Joye, 2009). Brines are also habitats for microorganisms in cold subglacial regions. Blood Falls, at the foot of the Taylor Glacier in Antarctica's Dry Valleys, is a “brine-fall” of iron(II)-rich fluid (Fig. 2, right) that contains interesting microorganisms such as the sulfur oxidizer Thiomicrospira arctica (Siegert et al., 2001). This habitat is a good analog for potentially habitable environments on Mars and the Icy Worlds.
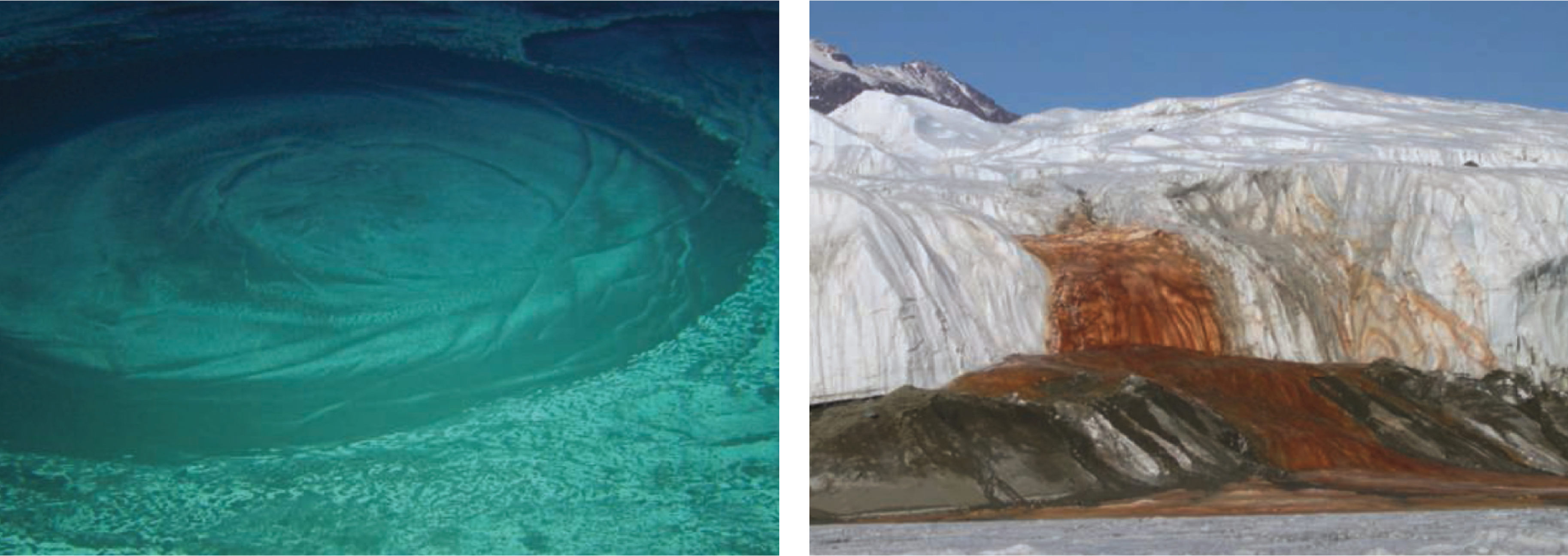
Brine habitats are found around the world. (
The existence of a global liquid water ocean below the icy surface of Europa (e.g., Ojakangas and Stevenson, 1989; Spohn and Schubert, 2003; McKinnon et al., 2009), likely containing biogenic elements (Hand et al., 2007), makes Europa a compelling target for astrobiology (Pappalardo et al., 2013). However, energy for biological processes might not be widely available in Europa's subsurface ocean. In fact, the availability of liquid water might be the best-resolved aspect of Europa's habitability (Pappalardo et al., 2013), but the understanding of this aspect can be improved significantly.
Sea ice is extremely interesting from the habitability perspective because it provides one of the coldest habitats for life on Earth, habitats with temperatures as low as 238 K (Maykut, 1986). Extensive microbial communities develop seasonally in sea ice in the polar oceans, in spite of their extremely low temperatures and high salinities (Palmisano and Garrison, 1993; Junge et al., 2001). Indeed, as illustrated in Fig. 3, microbes thrive in brine inclusions in sea ice, which concentrate nutrients and organics for microbial consumption (Junge et al., 2001). A lander could easily probe brine in the shallow subsurface of Mars. Indeed, the Phoenix lander most likely did (e.g., Rennó et al., 2009; Fischer et al., 2014).
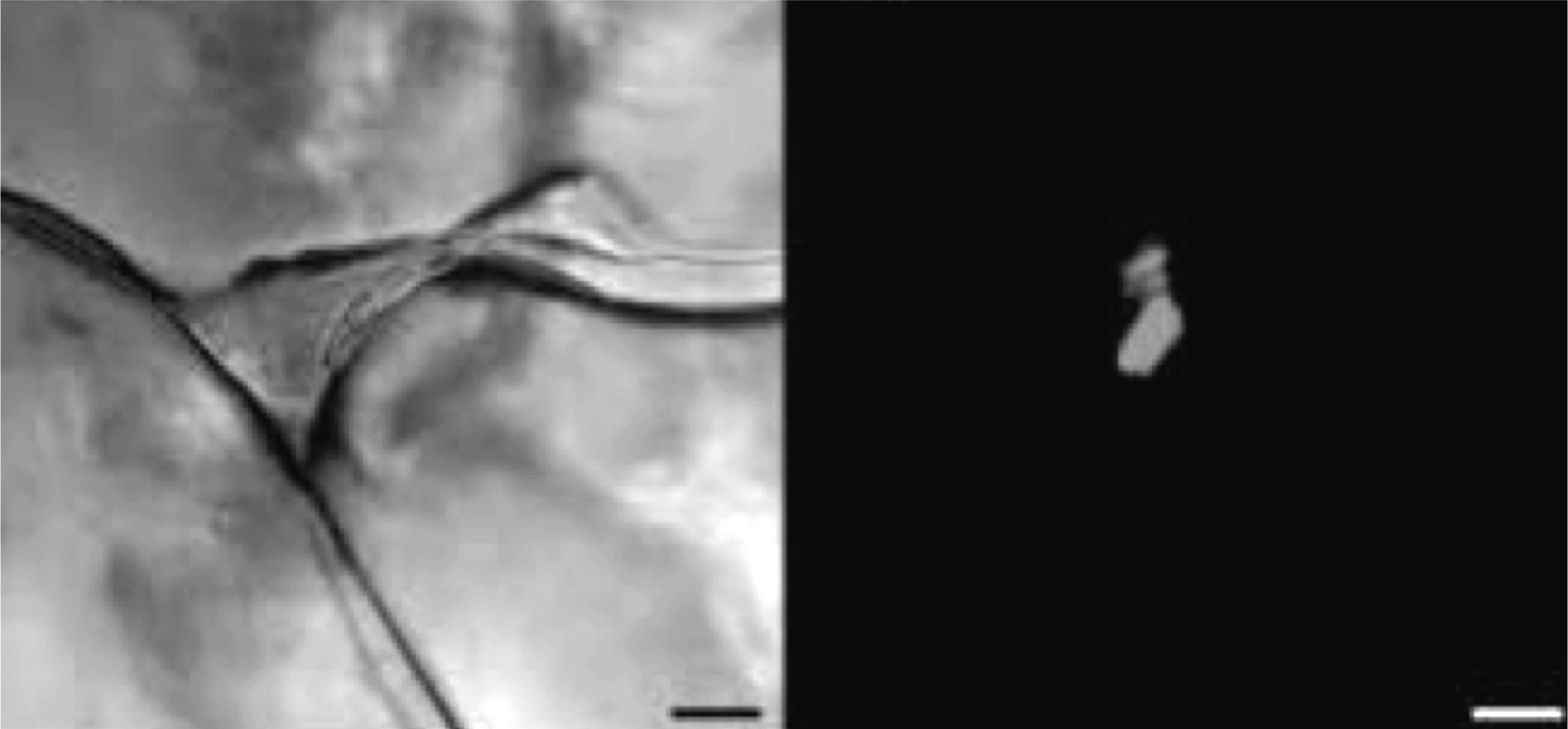
Microbes thrive in brine channels in sea ice. (
Analyses of martian soil samples show that they contain calcium carbonate, possibly magnesium carbonate, iron oxyhydroxides, smectites, iron sulfate, magnesium sulfate, and serpentines (Smith et al., 2009). Together with the most likely existence of liquid brines (e.g., Rennó et al., 2009; McEwen et al., 2011; Ojha et al., 2015; Dundas et al., 2017) and methane (Formisano et al., 2004; Mumma et al., 2004, 2009; Webster et al., 2015, 2018), this suggests that Mars could be habitable. Indeed, Curiosity found evidence for a past habitable fluvio-lacustrine environment on Mars (Grotzinger et al., 2014) and evidence for the formation of frost on Mars' equatorial region (Martínez et al., 2016).
Here we describe the Modern Aqueous Habitat Reconnaissance Suite (MAHRS), an instrument suite being developed primarily to support the search for habitable environments on Mars, but that could also be used to study the habitability of other planetary bodies such as the Icy Worlds. MAHRS is sufficiently mature to be proposed to Discovery, New Frontiers, or flagship missions.
2. The MAHRS Instrument Suite
MAHRS could shed light on habitability by measuring the wetness of the shallow subsurface and quantifying the exchange of material between the shallow subsurface and the atmosphere. Physical weathering processes that MAHRS could quantify include rock abrasion by the impact of saltating particles, and rock splitting caused by thermal stresses and ice and salt crystal growth in voids. Chemical weathering depends strongly on water abundance that MAHRS could measure in the shallow subsurface. Indeed, MAHRS could assess weathering by detecting saltation events, measuring the energy of the saltators, measuring the liquid water content of the top regolith, detecting possible change of phase of brines in the shallow subsurface, and characterizing the intensity of solar radiation at the surface. This is desirable because past and current studies of martian weathering have been mainly theoretical because of the lack of quantitative in situ measurements. We envision MAHRS being integrated into a rover or lander containing a robotic arm and other instruments such as an analytical laboratory capable of characterizing the geochemistry of the surface.
For dust lifting processes to be understood, the dust particle mass flux, the near-surface electric field, and the depth of the saltation layer need to be measured (e.g., Freier, 1960; Schmidt et al., 1998; Zheng et al., 2003; Kok and Rennó, 2006, 2007, 2008, 2009a, 2009b; Esposito et al., 2016). In addition, the dust concentration and regolith properties influencing dust lifting, such as regolith wetness, need to be measured (e.g., Borlina and Rennó, 2017). Thus, MAHRS is required to measure dust particle flux, dust concentration, electric fields, regolith wetness, and solar radiation. MAHRS will measure dust particle mass flux and the depth of the saltation layer at heights ranging from 0.01 to 2 m above the ground.
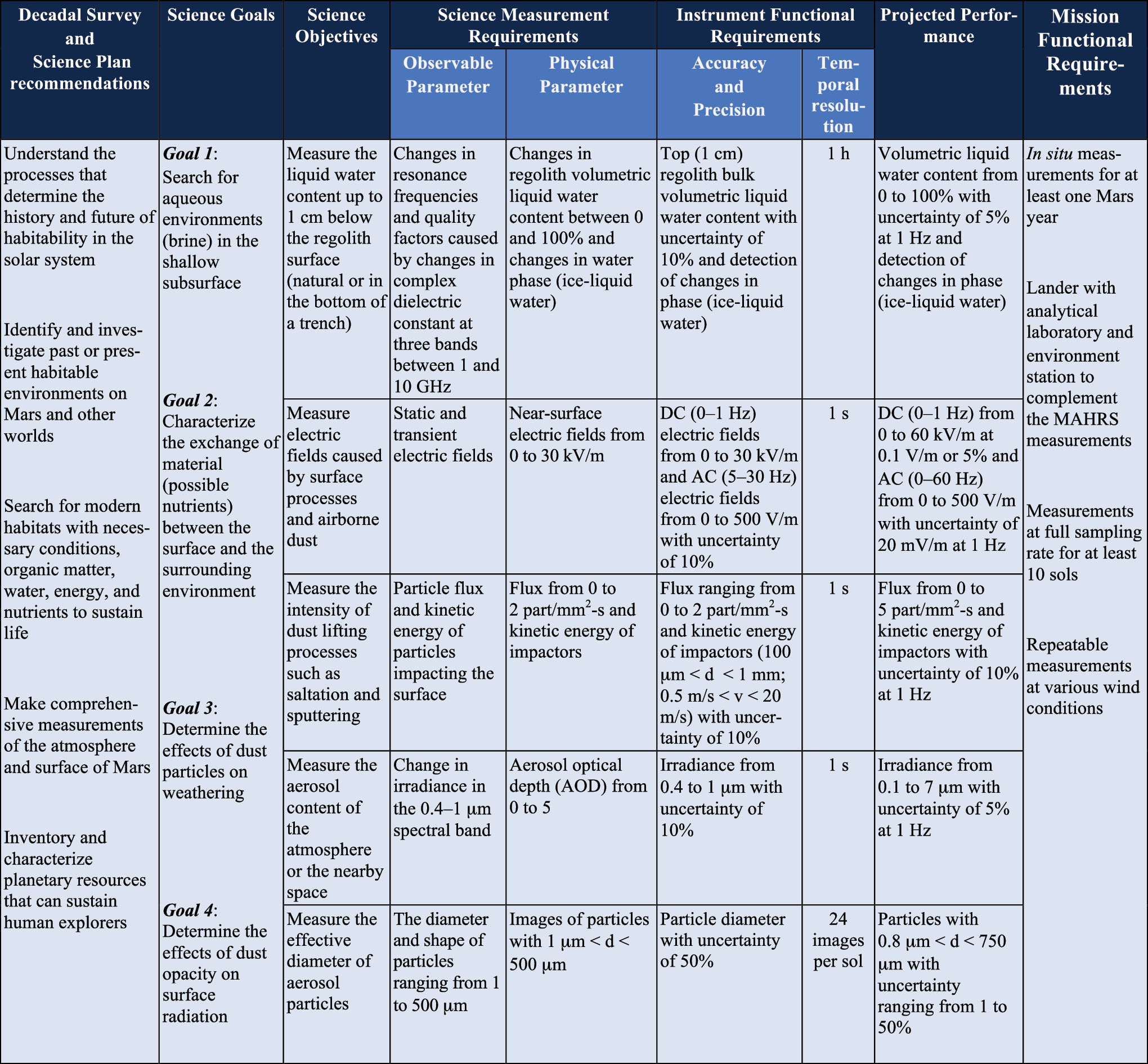
MAHRS responds to the top priorities of the 2013–2022 Decadal Survey and the 2018 Astrobiology Strategy (National Academies of Sciences, Engineering, and Medicine, 2018). As shown in Table 1, the main goals of MAHRS are to (1) search for aqueous environments in the shallow subsurface; (2) characterize the exchange of material between the surface and the surrounding environment; (3) determine the effects of dust/sand particles on weathering; and (4) determine the effects of dust opacity on surface radiation. This article focuses on the development of the overall instrument suite and measurements strategy. Individual instruments and the detailed results of their environmental tests and calibrations will be described in articles in a more specialized journal.
The Science Traceability Matrix indicates that MAHRS responds to the top priorities of the 2013–2022 Decadal Survey, the 2007–2016 Science Plan for NASA's Science Mission Directorate, and the 2018 Astrobiology Strategy
The complete measurement requirements and a brief description of the MAHRS instruments are provided in Table 1. Next, each instrument is discussed in alphabetical order.
2.1. The Electric Field Sensor (EFS)
Measurements of electric fields are important because there is evidence that they have a significant impact on dust lifting and habitability (e.g., Atreya et al., 2006; Delory et al., 2006; Kok and Rennó, 2007, 2008, 2009b; Esposito et al., 2016). On Earth, lightning transfers charges from the surface to the ionosphere, producing a global DC electric circuit. Moreover, on Earth lightning produces standing global electromagnetic waves in the surface-ionosphere cavity known as Schumann resonances (e.g., Heckman et al., 1998; Jackson, 1999). Similar processes are expected to occur on Mars because dust storms and dust devils are predicted to be electrically active (e.g., Melnik and Parrot, 1998; Farrell et al., 1999; Farrell and Desch, 2001; Ruf et al., 2009; Rennó and Ruf, 2012).
The lower end of the EFS DC electric field measurement range has been determined by the need to detect the potential absence of a global electric circuit on Mars, implying electric fields of the order of 0 V/m during quiescent periods (no dust activity). The upper end of the DC electric field measurement range is the electric breakdown value of the near-surface martian atmosphere, predicted to be about 20–25 kV/m (e.g., Melnik and Parrot, 1998).
The goal of the EFS measurements of AC electric fields is to search for evidence of Schumann resonances on Mars, which could be used to map electric discharges globally from a single location (e.g., Heckman et al., 1998). Therefore, the amplitude and frequency range of the EFS AC electric field measurements are those necessary for capturing the first three modes of the martian Schumann resonances, estimated to be orders of magnitude larger than those on Earth (Ruf et al., 2009; Rennó and Ruf, 2012). The accuracy and precision required for both the AC and DC electric field measurements are a fraction of their values (10%).
The EFS uses an innovative technique to measure electric fields accurately even while the sensor is subject to the impact of charged particles (Rennó et al., 2008; Rennó and Rogacki, 2013), in contrast with the techniques used by previous electric field sensors. Indeed, the EFS is capable of making accurate measurements of electric fields even within active dust-lifting processes.
The EFS is capable of measuring vector electric-fields ranging from DC to AC fields of about 100 Hz at higher accuracy and sensitivity than other instruments. This is accomplished by using a combination of quadrature modulation and phase-sensitive quadrature demodulation, implemented in a processor or digital signal processor as illustrated in Fig. 4 (Rennó and Rogacki, 2013).
The block diagram of the EFS electric field sensing subsystem indicates that the sensing cylinder is split into four sensing elements along the axis of rotation to measure true DC and AC fields (Rennó and Rogacki, 2013).
The EFS has been matured to Technology Readiness Level (TRL) 6 after tests at Mars-like environmental conditions in the Michigan Mars Environmental Chamber (MMEC). In addition, an earlier version of the EFS has been operating for more than 4 years at the University of Michigan (U–M) field site in the Owens Dry Lake in California. This has been testing the EFS operation for extended periods of time (years) in one of the dustiest places in the United States (Fig. 5). This test has proved that the EFS' newest dust seal is capable of keeping the rotating mechanisms in working conditions for years. The Owens Dry Lake field site is part of a project on saltation and dust lifting funded by the National Science Foundation (NSF). The data from the instruments installed at this field site are received in real time at U–M.
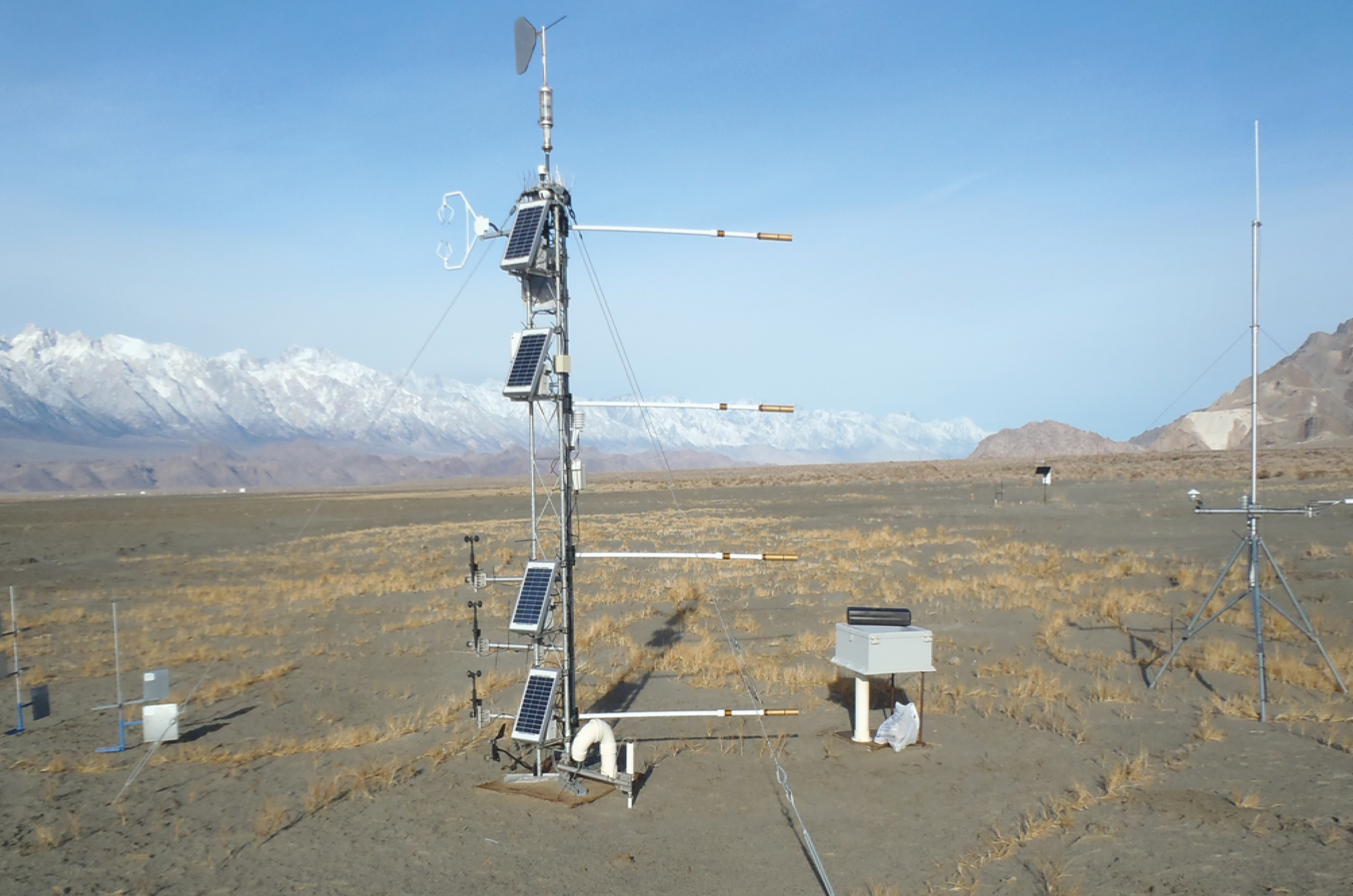
The EFS has been operating continuously for more than 4 years at the U–M field site in the Owens Dry Lake in California. The Owens Lake area is one of the dustiest places in the United States. The gold-plated instruments at the tip of the four parallel horizontal rods extending to the right of the tower are the EFS (Halleaux and Rennó, 2014).
An earlier version of the EFS flew in a European Space Agency (ESA) stratospheric balloon. The balloon flight piggybacked on an experiment led by the University of Paris VI (Seran et al., 2013). The EFS performed nominally in the balloon flights in February and March of 2011. Each flight lasted between 4 and 6 h (Fig. 6). Since the temperature and pressure at the flight altitude ∼30 km is similar to that at the surface of Mars, these flights tested the EFS operation in a Mars-like but clean environment.
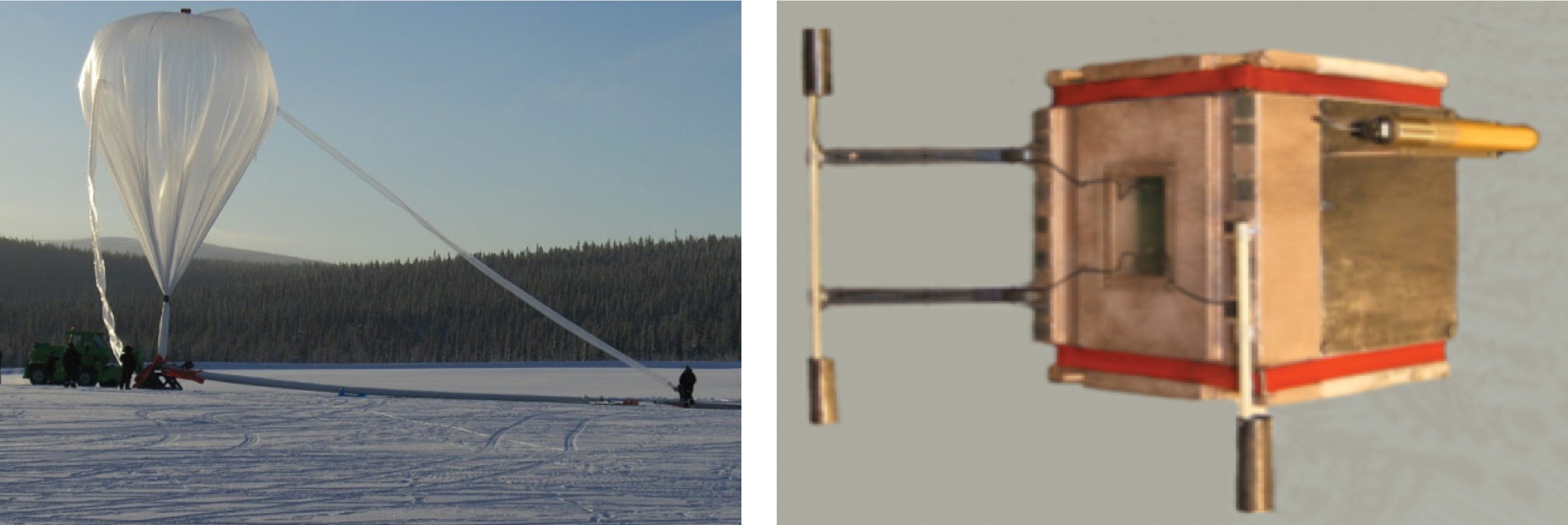
An EFS prototype flew in an ESA stratospheric balloon. (
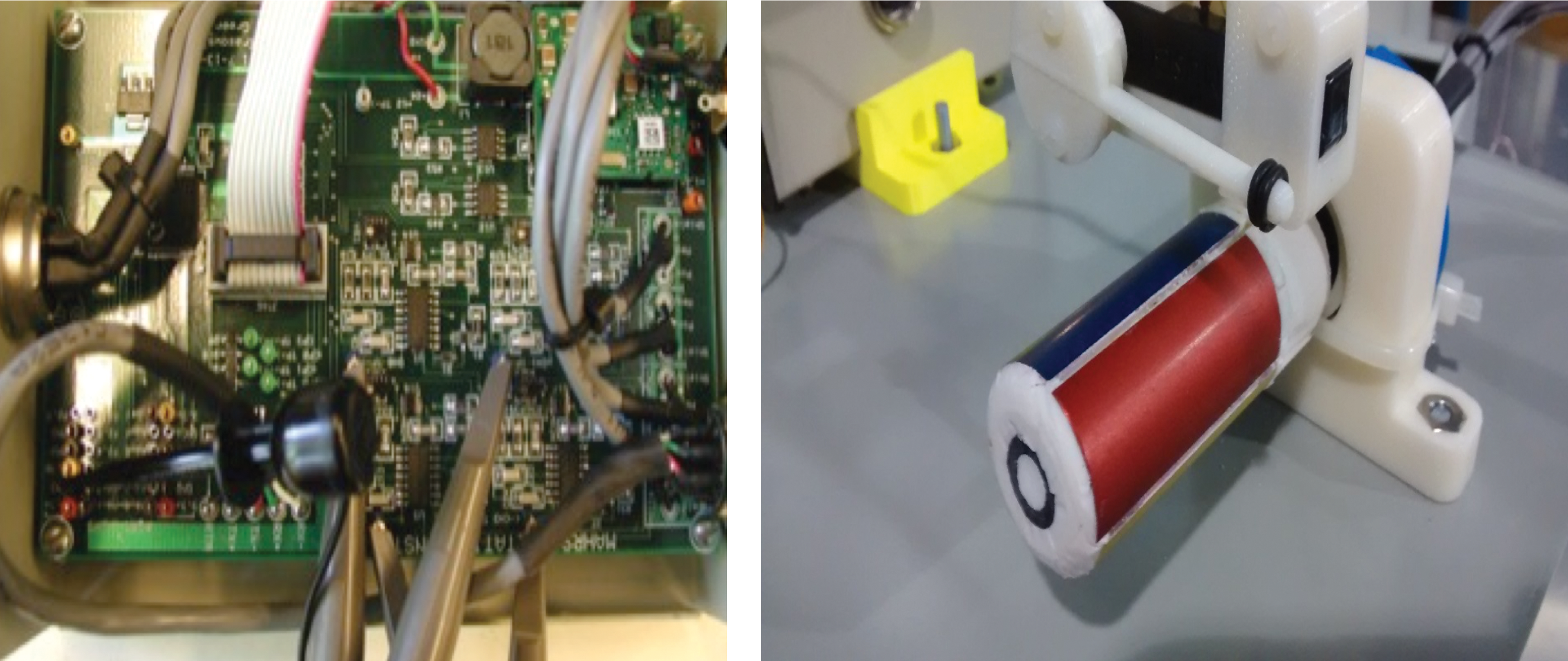
The EFS uses shielded bearings with space-qualified dry lubricant. The dust-seal geometry was studied and tested carefully before the flight-qualifiable EFS was designed because the dust seal impacts the motor size and power requirements. The current EFS prototype weighs 1 kg and consumes 1 W when operating nominally and 2.4 W with heaters turned on. The EFS is 22 cm long and 6.5 cm in diameter. The sensor diameter is constrained by the size of the rad-hard Field Programmable Gate Array (FPGA) mounted in one of the rotating electronic boards shown in Fig. 7. The EFS design and the results of its tests will be discussed in detail in a journal article focused on the EFS design and tests. However, we point out that Rennó et al. (2008) showed that the EFS is capable of measuring electric fields accurately even when subject to the impact of charged dust particles. This occurs because the amplitude of the signal induced by electric fields depends on the rotation of the sensor (angular velocity), but the signal induced by the impact of wind-borne charged particles depends only on the cross-section area of the sensing cylinder perpendicular to the wind vector and the flux of charged particles. Moreover, the signal due to the impact of charged particles is transient because the sensor is isolated from the ground, vanishing when the sensor reaches the electric potential of the charged particles.
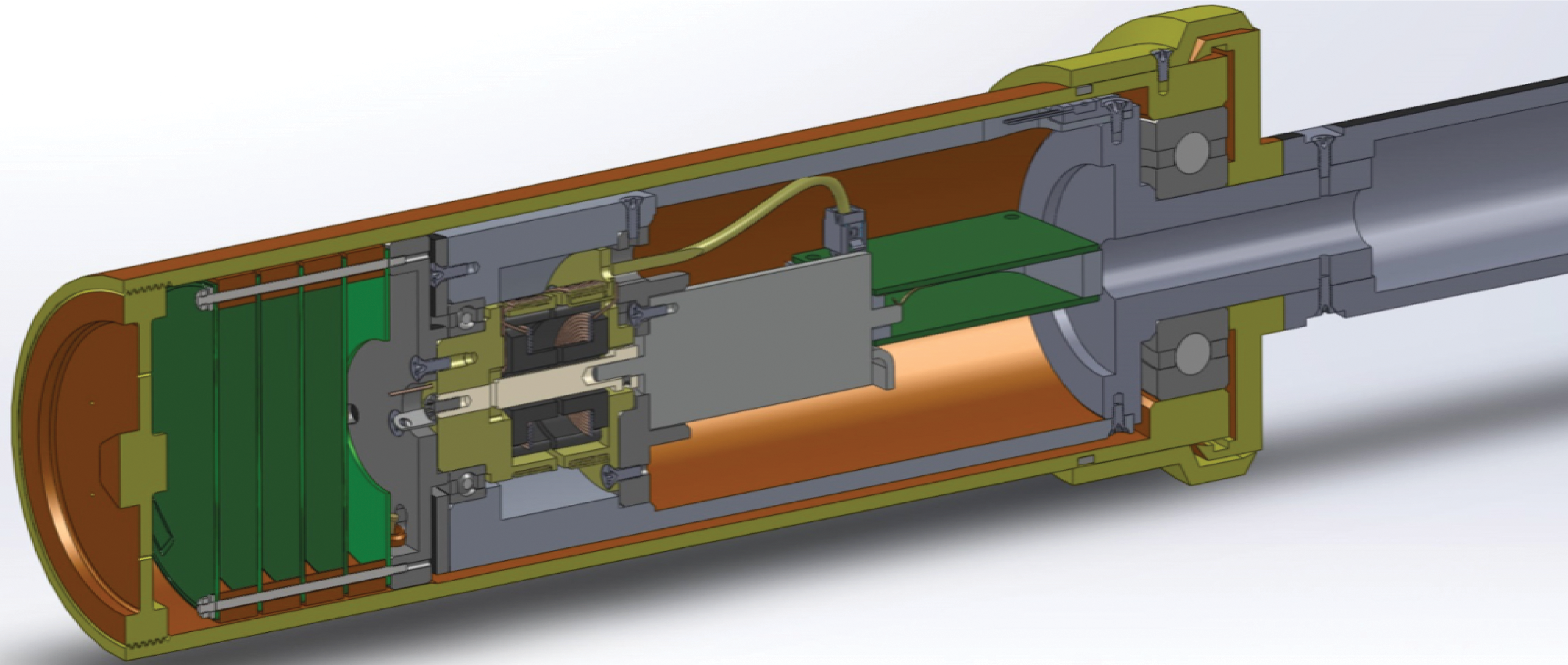
The EFS flight version is cantilever with two ball bearings colored in dark gray, a large one in the rear of the instrument and a smaller one in the front of the rotating transformer. Two nonrotating electronic boards are mounted horizontally in the rear of the instrument, while four rotating electronic boards are mounted in the front of the instrument. A DC brushless motor is used to spin the sensing cylinder.
We envision various modes of operation for the EFS, including (1) continuous operation for measuring electric field at 1 Hz for hours per day to measure the frequency of dust lifting caused by wind gusts and small-scale weather systems such as dust devils (Kok and Rennó, 2008; Kok et al., 2012), (2) operation for a few minutes each hour to characterize the diurnal and seasonal variations in the near-surface electric field, and (3) operation triggered by events such as dust storms and dusty plasma activities. Increases in dust opacity measured by the MAHRS Radiometer (RAD) could be used to trigger the operation of the sensor. The various modes of operation will be refined and tested in the field as part of the maturation of the instrument suite architecture.
2.2. The Optical Microscope (OM)
The Optical Microscope (OM) was designed to characterize sand and dust particles (saltators) on Mars. The lower end of the OM measurement range at about 1 μm is the typical diameter of airborne dust particles while the upper limit at about 500 μm is the diameter of the largest saltators (e.g., Toon et al., 1977; Clancy et al., 1995; Kok, 2010; Vicente-Retortillo et al., 2017). The accuracy and precision required for the OM measurements are a fraction of the particle size.
The MAHRS OM is based on an instrument developed for the Mars 2001 Surveyor Lander, the microscope for the Dust Accumulation and Removal Technology (DART) experiment (Fig. 8). The DART microscope was designed to image atmospheric dust particles that would settle on its objective. The microscope's objective was heated by four positive temperature coefficient (PTC) thermistors that would prevent frost from forming on it. The imager was a single-chip FUGA–15 active pixel sensor (discrete photodiode) imager produced by Fillfactory, with a 512 by 512 array of 12.5 by 12.5 μm pixels randomly addressable by an external processor. This high-heritage imager flew on ESA's TeamSat mission and X-ray Multi-Mirror Mission (XMM-Newton) (Habinc et al., 2000) and was tested at Mars environmental conditions during the DART development.
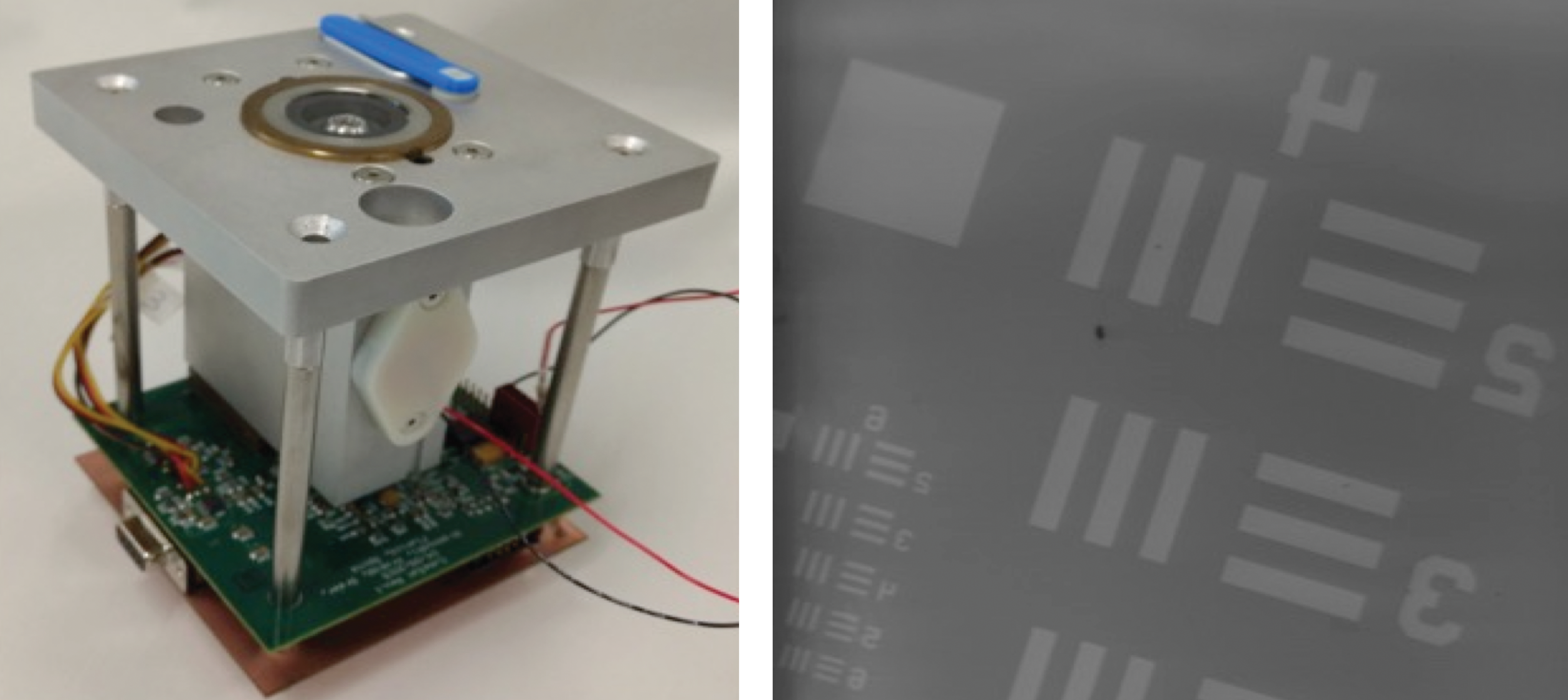
(
A block diagram of the MAHRS OM electronics is shown in Fig. 9. The image sensor is an On Semiconductor STAR1000 radiation-tolerant active pixel sensor that has flown as a star tracker on ESA's Alphasat (Schmidt et al., 2015). The processor core is a Microsemi ProASIC3 FPGA, which has a radiation-tolerant flight version. The processor's memory is Everspin Magnetoresistive Random-Access Memory that has a radiation-tolerant flight version produced by Cobham Aeroflex, which can store one entire image even when powered down.
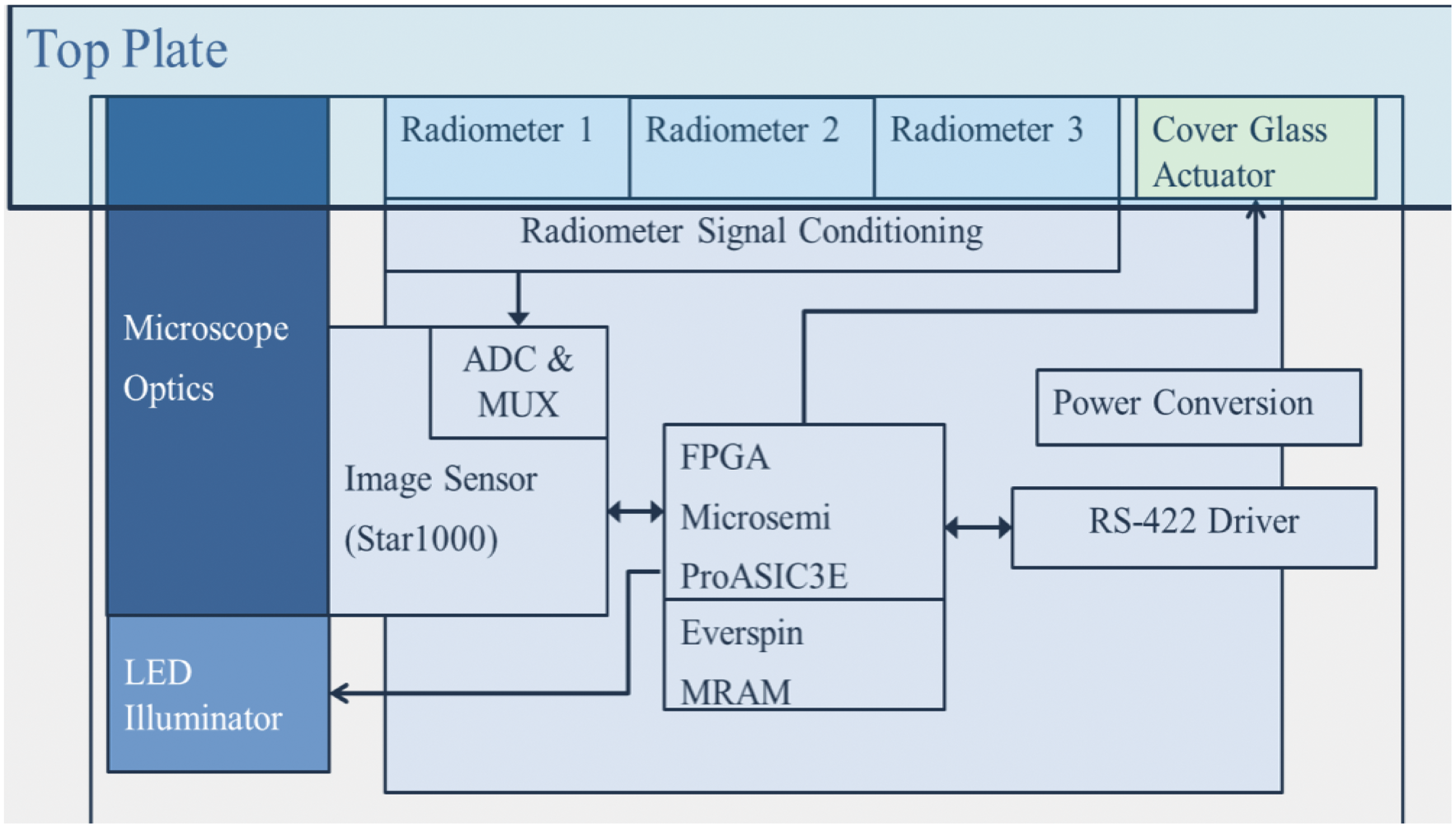
The electronics and image sensor of the MAHRS OM is an updated version of those of the DART microscope.
The STAR1000 is a 1024 by 1024 array of 15 by 15 μm pixels randomly addressable by an external processor, which includes an onboard 10-bit analog-to-digital converter (ADC) to digitize the pixel values. The OM uses a commercial objective, available in 10X, 20X, and 40X magnifications. During tests at Mars conditions, a 20X objective was used, resulting in 0.75 μm pixels. An LED is used to back-illuminate the target, to allow for imaging in low light conditions. A test target was used to resolve objects 4.4 μm in dimension throughout Mars surface environments tests with no external light (Fig. 8). The STAR1000 provides an onboard programmable gain amplifier as well as variable integration time.
The OM electronics control is provided by the FPGA, and the host command and control is performed over an RS-232/485 link at 115,200 baud. The OM electronics assembly contains two stacked printed circuit assemblies; the top is the OM electronics core, and the lower power/communication (P&C) board provides the power conditioning and the serial transceiver. This allows the OM to conform to different spacecraft buses by adapting the P&C board.
2.3. The Radiometer (RAD)
RAD was designed to measure the irradiance at the surface of Mars in order to estimate the aerosol optical depth, but with a change in the filter it could also be used to measure the flux of UV radiation at the surface if desirable. The RAD measurement extends from the lower end of the visible band at about 0.4 μm to the near infrared at about 1 μm. This covers the most energetic range of the solar spectrum. The accuracy and precision of both the RAD irradiance measurements are a fraction of the irradiance flux (10%).
RAD uses three of the analog channels of the OM's radiation-tolerant STAR–1000 imaging array to measure the solar radiation flux at the surface of Mars at any spectral band of interest. The STAR–1000 imaging array has four input analog multiplexers and a 10-bit ADC. The OM imager uses one of these multiplexer channels. The remaining three channels are used to interrogate the radiometer circuits. RAD is designed primarily to measure relative changes in the optical opacity of the martian atmosphere. The radiometer itself is based on the S25 TO–5 Silicon Thermopile Detector from Dexter Research Center that was used on the Mars Array Technology Experiment (MATE). Sapphire or ultraviolet (UV) quartz windows can be used to measure UV radiation. Sapphire, which passes radiation at wavelengths ranging from 0.1 to 7.0 μm, was used on MATE. Additional optical filters may be used in the assembly to constrain the radiation flux to a particular band of interest, although filters were not used during tests. The RAD assembly consists of three detectors that allow radiation to be measured in three different bands.
The conditioning of the radiometer signal is relatively simple. For MATE, the output was predicted to be <26 mV in the martian environment. A simple low-noise, high-input impedance operational amplifier circuit is used on both MATE and MAHRS. The circuit is bundled into the microscope assembly and connected to the STAR–1000 ADC through the multiplexer.
The microscope/radiometer instrument assembly is connected to the host processor via a serial RS-232/RS-485 data link. Commands uplinked to the instrument determine whether the device should download an image or read and download radiometer data. Because the image pixels are randomly addressable, no memory is needed to store an image prior to download. Furthermore, subframes of interest can be selected for downlink or storage.
Measurements of solar radiation at the martian surface can be significantly affected by dust deposition on the sensors (Vicente-Retortillo et al., 2018). To minimize contamination by falling dust, the optical window has a cover that is opened only while making measurements. The cover is made of shape memory alloy similar to that developed by NASA Glenn Research Center (GRC) team members for the 1996 Mars Pathfinder Sojourner Rover Materials Adherence Experiment (MAE) (Jenkins et al., 1997). Moreover, a technique developed by Vicente-Retortillo et al. (2017) for correcting the data from the Mars Science Laboratory's UV measurements for the effects of dust deposited on the sensor's optical window will be used for generating radiation data products. This technique uses the response of the sensor to direct and diffuse radiation to remove the effects of dust deposited on the sensor from the data. More specifically, the technique uses the ratios of the signals between Sun-illuminated areas and shadows, acquired as the Sun moves toward the edge of blocked region of the radiation sensor's field of view, to find model-calculated values of atmospheric opacity and dust particle size that best match the measured ratios (Vicente-Retortillo et al., 2017).
2.4. The Saltation Sensor (SALT)
The Saltation Sensor (SALT) was designed to measure the flux and energy of saltating particles impacting the surface of Mars. This is important because saltation is one of the most important currently active geological processes on Mars (e.g., Silvestro et al., 2010; Bridges et al., 2012). The accuracy and precision of the SALT measurements of sand particle flux and the kinetic energy of saltators are a fraction (10%) of the predicted values (e.g., Kok, 2010).
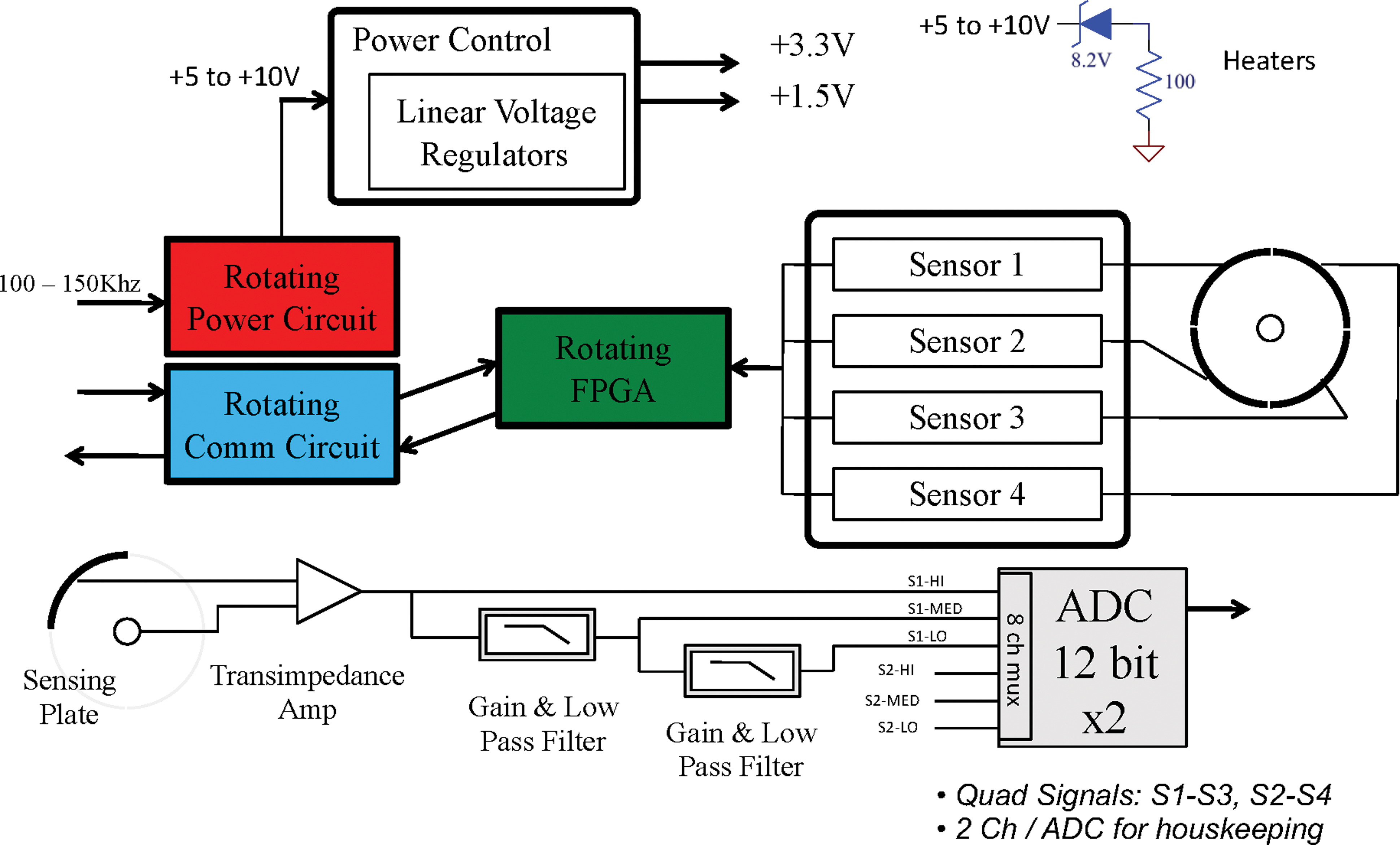
SALT uses a simple, low-power, piezoelectric sensor to characterize saltation events. The onset of saltation is determined by detecting the impact of particles on a piezoelectric sensor, while the intensity of saltation is determined by counting the number of particles impacting the sensor per unit time and integrating the amplitude of the pulses generated by these impacts—a measure of their energy—over a specific period of time. Four piezoelectric sensors are mounted 90° apart to also determine the impactors' incoming direction (Figs. 10 and 11).
SALT reached TRL 6. (
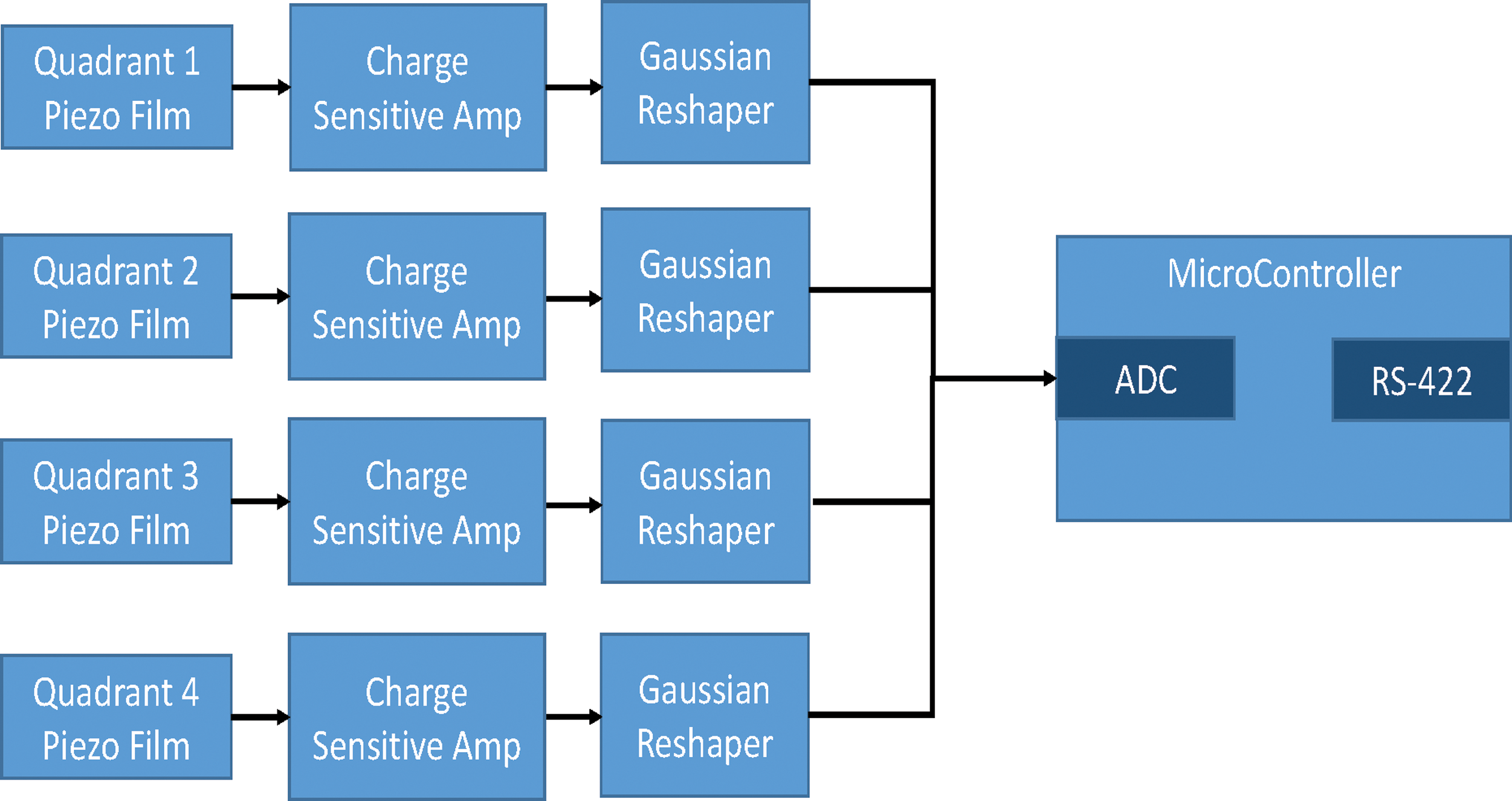
The SALT block diagram illustrates the four-quadrant signal conditioning of the sensor electronics.
SALT consists of four sensor units intended to be mounted at heights ranging from 0.1 to 2 m above the surface to measure the depth of the saltation layer, an important quantity (Kok and Rennó, 2007, 2008, 2009a). The SALT sensors are based on the Quartz Crystal Microbalance (QCM) dust sensor designed and fabricated for MAE by NASA GRC team members. The QCM was designed to measure dust deposition on the rover's solar panel. Its circuit was based on a zero cross detector generating a binary pulse train from the QCM quasi-sinusoidal output.
A similar circuit is used to condition the output of the piezoelectric sensor. However, in the case of SALT, incoming dust impact events are first pulse-shaped into quasi-Gaussian form and both digitized directly to obtain pulse height information and also converted into binary pulse trains to obtain pulse count information.
2.5. The Regolith Wetness Sensor (WET)
The Regolith Wetness Sensor (WET) was designed to search for brines and to measure the regolith's volumetric liquid water content (VWC) within the first few centimeters below the surface (Zandonadi et al., 2015). WET measures VWC with uncertainty of 10% and detects changes in water phase (freezing/melting). The regolith's gravimetric liquid water content (GWC) can be calculated from VWC, the regolith's bulk density (ρ R), and the density of water (ρ w) as GWC = VWC × ρ R /ρ w. The ring resonator needs to be in contact with the regolith for making these measurements. Thus, WET needs to be mounted on a robotic arm or a landing pad.
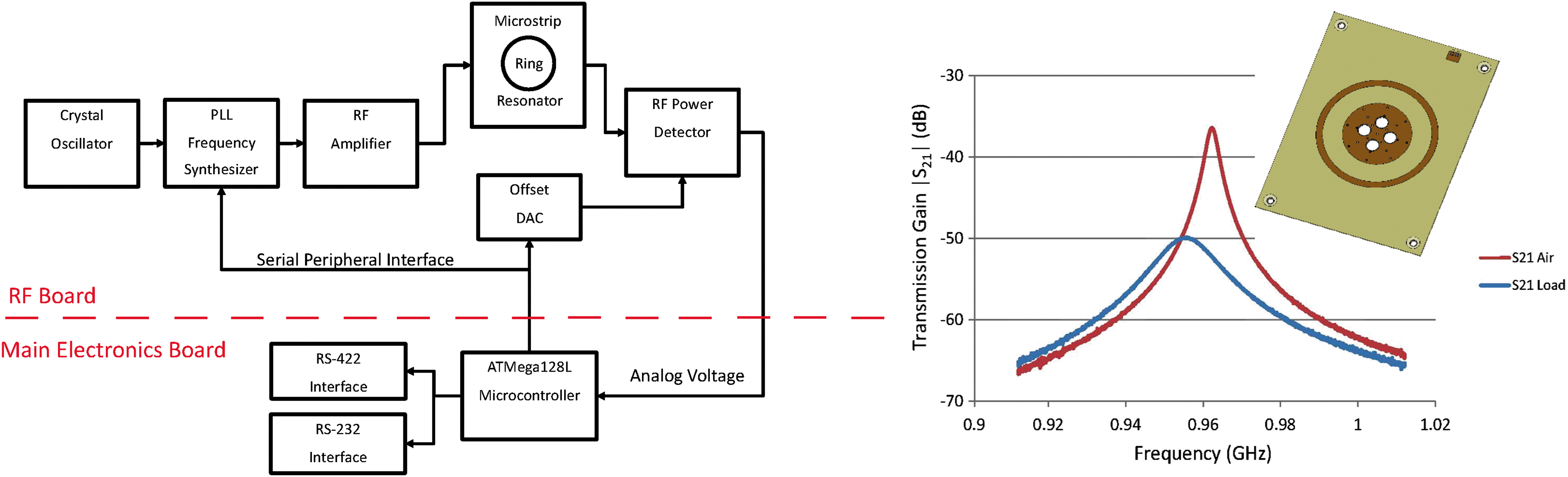
WET consists of a microstrip ring resonator and its control and data handling electronics (Fig. 12). Microwave resonators have been used to measure the dielectric properties of soils and the water content of snow (e.g., Kendra et al., 1994; Sarabandi and Li, 1997). Our contribution to the technology was the development of a technique that allows the detection of liquid water and brine unambiguously. This innovation is described next.
(
The quality factor Qj
of a resonator at angular resonant frequency ωj
is defined as 2π times the ratio of the maximum energy stored in the cavity per resonance cycle (W
0j
) to the average energy dissipated per cycle (Pj
), that is
where Tj
= 2π/ωj
is the resonance period and the subscript j indicates the resonance mode. Many properties of resonators can be studied by using analytical solutions to simple resonant circuits (e.g., Kajfez and Guillon, 1998). These solutions indicate that the quality factors of the resonances (Qj
) are a measure of the sharpness of their response to excitation and that losses always reduce the resonant frequencies. Indeed, it can be shown that the quality factor of a resonance is approximately
where fj = ωj /2π is the mode j ordinary resonance frequency (in Hz), and Δfj = Δωj /2π is the half-power bandwidth of the resonance (the bandwidth of the signal 3 dB below the peak power value at resonance frequency fj ) (e.g., Kajfez and Guillon, 1998).
Measurements of resonance frequencies and their quality factors allow the determination of the complex permittivity of materials in contact with a resonator (e.g., regolith, ice, brine, or wet regolith). However, it is important to note that changes in the quality factors of the resonances and the shifts in frequencies depend not only on the properties of the material in contact with the resonator (the load) but depend also on the properties of the resonant circuit (both the RF circuit and the ring resonator in the case of our instrument).
In general, a resonant circuit dissipates energy by dielectric losses (P
dj
), conductor losses (P
cj
), radiation losses (P
rj
), and external losses (P
ej
). Thus, the quality factors of the loaded resonator at the mode j resonance frequency (Q
Lj
) are related to the losses at the same frequency; that is
where Q uj are the quality factors of the unloaded circuit (e.g., Kajfez and Guillon, 1998). In our instrument, the external losses (Q ej ) are those occurring in the dielectric material in contact with the microstrip resonator (e.g., water, brine ice, regolith). Therefore, an important goal in the design of the electronics of our instrument and of its microstrip resonator was to maximize Q uj in order to maximize the sensitivity of the instrument to external loads (in a perfect resonator, Q uj →∞).
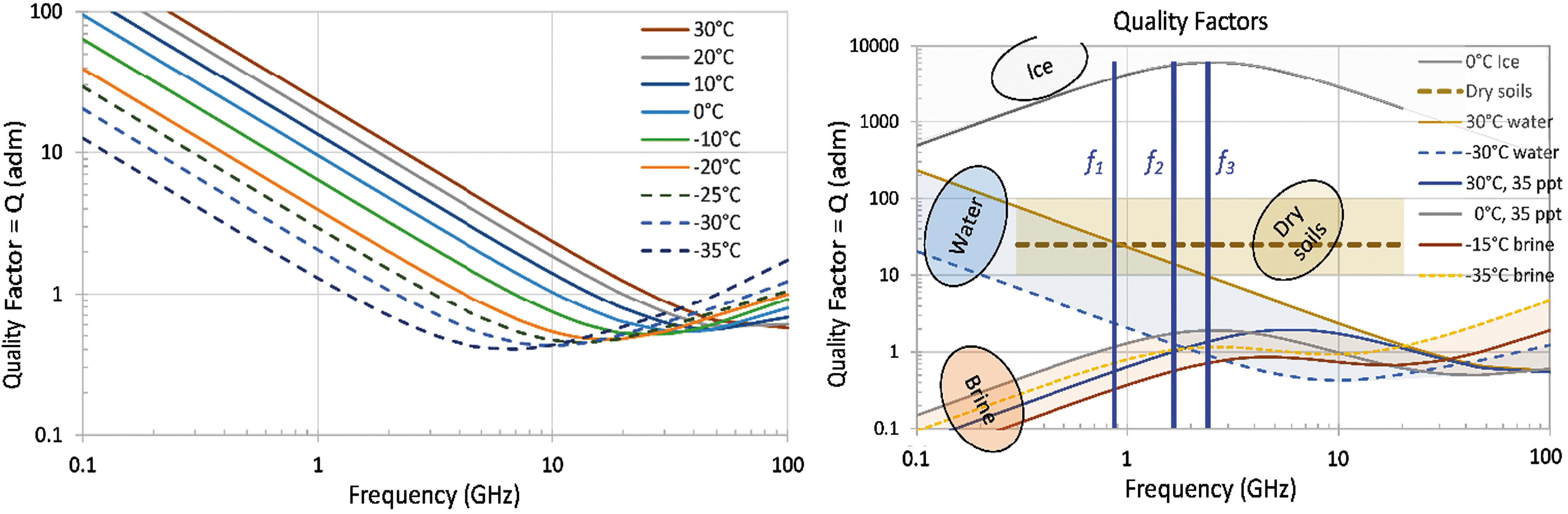
The quality factor of the unloaded sensor (WET) at its various resonance frequencies can be measured by calculating their values when the ring resonator is exposed solely to air. Laboratory measurements with the unloaded sensor demonstrated that WET is insensitive to temperature variations. In order to meet the requirements of searching for brines in the top regolith and measuring the regolith's liquid water content, we measure the shifts in the resonance frequencies and the quality factors of the resonances at approximately 0.94, 1.88, and 2.82 GHz. The reasons for the selection of these frequencies for WET and its microstrip resonator are explained below.
Microstrip resonators are sensitive to changes in the permittivity of materials in contact with them (the load) because the ability of a material to polarize and dissipate energy in response to changes in electric fields is a function of the material permittivity that is usually expressed in terms of the material's relative permittivity at the frequency of interest
where ɛ is the absolute permittivity at the frequency of interest and ɛ
0 = 8.854 × 10−12 F/m is the permittivity of a vacuum. The permittivity of a material is a complex number usually written as
where ɛ r′ is the real part and ɛ r″ is the imaginary part of the relative permittivity. The real part of the permittivity shifts the resonance frequencies of a resonator in contact with the material by changing the phase velocity of the electromagnetic waves propagating in the resonator. The imaginary part of the permittivity changes the quality factor of the resonances by dissipating energy of the electromagnetic waves propagating in the resonator.
The quality factor Q
ej
of the external dielectric load due to a material of permittivity ɛ
r = ɛ
r′ + iɛ
r″ (e.g., liquid water, brine) at the frequency of a specific resonance mode j is
The dielectric properties of the material in contact with the ring resonator at the frequency of the resonance mode j can be estimated approximately by using Eq. 6 and the relationships
and
where the subscripts L and u refer to values obtained by measurements with the loaded and the unloaded resonator (e.g., Kajfez and Guillon, 1998). More accurate values for the dielectric properties of materials in contact with the resonator can be obtained by using lookup tables constructed with data from laboratory measurements with a specific instrument (the resonator and its circuit).
Measurements between 0.5 and 5 GHz are ideal for detecting brines or liquid water with a microstrip resonator because the dielectric quality factors (the external quality factors in our case) of liquid water, brine, and their dependence on frequency are extremely different in this frequency range (Fig. 13). Measurements at this frequency range allow the detection of the presence of these substances and the quantification of their amounts. In addition, liquid water can be easily detected when it freezes or when ice melts because the change of state from liquid to solid and vice versa causes large changes in the imaginary part of the dielectric constant and therefore the dielectric (external) quality factor.
(
3. Field Measurements
We have been using commercial instruments that measure the same physical parameters as MAHRS to make measurements in an arid site in which the shallow subsurface is episodically wetted by runoff water from snowmelt in nearby mountains in the spring and from orographic thunderstorms in the late summer and early fall, a salty playa in the Owens Dry Lake in California (Fig. 5). Results from these field measurements inspired the development of the MAHRS instrument suite and, as discussed below, can also be used to assess MAHRS' ability to find potentially habitable environments and quantify weathering on Mars and other worlds.
The field measurements started before MAHRS was proposed and continued in parallel with the MAHRS development. This has been useful because insights gained in the field have benefited MAHRS; for example, a dust seal of the MAHRS EFS was tested at the field and then redesigned when inspection of a sensor that operated continuously at the field for about a year indicated that fine dust was getting into the sensor's ball bearings. Redesigned sensors have been operating successfully at the field since 2016. In addition, electric field, saltation, and irradiation measurements inspired the development of measurement modes to capture phenomena of interest such as the use of the detection of the onset of saltation to trigger image caption as illustrated in Fig. 15.
As discussed in the introduction, a full habitability assessment requires the determination of not only the presence of liquid water but also the composition of aqueous solutions if any is found, the solution's temperature, the solution's water activity, and other factors such as the existence of sources of energy, nutrients, and raw materials for biosynthesis. For this reason, MAHRS was designed for implementation in a lander containing an analytical laboratory capable of measuring the composition of the shallow subsurface material, and an environmental station capable of measuring temperature and water activity, including their variations throughout diurnal and seasonal cycles.
We have been measuring saltation, near-surface atmospheric electric fields, soil water content, solar irradiation, aerosol concentration, and photographing dust-lifting events automatically (triggered by saltation) at the Owens Dry Lake since December 2012 (e.g., Halleaux and Rennó, 2014; Borlina and Rennó, 2017). Except for the electric field sensor that is an earlier version of the EFS capable of measuring only DC fields (Rennó et al., 2009), all other instruments are commercial-off-the-shelf instruments (Halleaux and Rennó, 2014). These commercial instruments are similar but not identical to the MAHRS instruments. Saltation is measured with a Sensit H11-LIN sensor, DC electric field with a nonquadrature version of the MAHRS EFS (Rennó et al., 2008), soil VWC is measured 30 cm below the surface (close to the local briny water table) with a Campbell-Scientific CS616 sensor, and irradiance (between 0.3 and 2.8 μm) with a Campbell-Scientific CNR4 net radiometer. All measurements are made at 1 Hz, but the data presented in Fig. 14 represents hourly averages. Since the instruments we use at the field site are similar to the MAHRS instruments, the lessons learned at the field are being used to develop measurement strategies for assessing weathering and habitability on Mars and beyond.
It is clear from Fig. 14 that weathering due to abrasion by saltation is active at the Owens Dry Lake site. Indeed, saltation events occur regularly, with intense events like the one observed in March producing hourly mean DC electric fields of the order of 5 kV/m. Peak electric field values of more than 10 kV/m were detected frequently. On Mars, electric fields this large could have significant impact on dust lifting and habitability (e.g., Atreya et al., 2006; Delory et al., 2006; Kok and Rennó, 2007, 2008, 2009b; Esposito et al., 2016). Images taken before and after the March event are shown in Fig. 15. The acquisition of images during the March event was triggered by the detection of saltation.
The data shown in Figs. 14 and 15 indicates that aeolian processes are active at the Owens Dry Lake site, mixing the top soil and therefore likely providing the energy and nutrients necessary for sustaining microbial life in the shallow subsurface. The fact that the shallow subsurface surface becomes extremely wet periodically indicates that liquid water, a necessary condition for life, exists at the site in spite of the surface being extremely arid as illustrated in Fig. 16. Our measurements at the Owens Dry lake indicate that the site meets basic habitability criteria such as the existence of liquid water at the shallow subsurface and active mixing by aeolian processes that could provide the energy (redox gradients) and nutrients necessary for sustaining microbial life, but other parameters such as the composition of the aqueous solution, the solution's temperature, and the solution's water activity would also need to be measured. On Mars, the measurement of the regolith water content and the detection of active saltation could aid in the selection of optimum areas for sample collection. Areas of active saltation in which the water content is the highest would be the best areas for sample collection.

Year-long (2014) time series of hourly mean average of measurements of saltation, DC electric field, soil VWC, and solar irradiance at the Owens Dry Lake site with instruments similar to those of the MAHRS instrument suite. Saltation events with values less than 0.1 impacts/s are multiplied by 200 and plotted as a large dot to make them more visible. The gaps in soil VWC data occur when the soil VWC 30 cm below the surface exceeds the maximum measurable value of about 0.9, indicating extremely high briny liquid water content.

Images taken before and during the intense saltation event observed in March. This event produced an abrupt increase in the atmospheric opacity that reduced the solar irradiance at the surface significantly.

The surface of our field site in the Owens Lake is extremely arid as indicated by the panoramic image (
The detection of aeolian processes indicates that weathering by particle abrasion is active, while the presence of liquid water and freezing during diurnal or seasonal cycle would indicate that frost weathering is active (see Walder and Hallet, 1986), while large irradiation fluxes indicate rock weathering by thermal stresses is active (see Eppes et al., 2016). The data from the field measurements could be used to develop laboratory experiments to quantify weathering.
4. Conclusions
MAHRS was developed primarily to support the search for habitable environments on Mars, including in situ measurements to aid in the selection of optimum areas for sample collection. Additionally, some of MAHRS' instruments could also be used to study the shallow subsurface of other planetary bodies such as Europa and Titan.
MAHRS' main goals are to (1) search for aqueous environments in the shallow subsurface; (2) characterize the exchange of material between the surface and the atmosphere; (3) determine the effects of dust particles on weathering; and (4) determine the effects of atmospheric dust on surface radiation. Measurements with similar, but not identical, instruments at the Owens Dry Lake indicate that MAHRS can be used to estimate weathering, study habitability, and support the search of optimum areas for sample collection.
MAHRS and its individual instruments are sufficiently mature to be proposed to Discovery, New Frontiers, flagship missions, and other opportunities.
Footnotes
Acknowledgments
Funding for this project was provided by NASA's MATISSE Award # NNX13AR05G, ASTID Award # NNX12AR53G and Exobiology Award # NNX11AJ19G. We would like to thank Lorie L. Passe for editing an earlier version of the manuscript. We also would like to thank Dr. Christopher P. McKay, two anonymous reviewers, and the editor Dr. Sherry Cady for the excellent comments and suggestions.
Disclosure Statement
No competing financial interests exist for the applications described in this article.