
Abstract
From February 1 to 28, 2018, the Austrian Space Forum, in cooperation with the Oman Astronomical Society and research teams from 25 nations, conducted the AMADEE-18 mission, a human-robotic Mars expedition simulation in the Dhofar region in the Sultanate of Oman. A carefully selected field crew, supported by a Mission Support Center in Innsbruck, Austria, conducted 19 experiments relevant to astrobiology, engineering disciplines, geoscience, operations research, and human factors. This expedition was the 12th in a series of analog missions that emulate selected aspects of the science expected for a human Mars mission, including the characterization of the (paleo)geological environment, human factors studies, and the search for biomarkers. In particular, an Exploration Cascade was deployed as a suggested workflow for coordinating the timing and location of the respective instruments and experiments. In validation of this workflow, the decision-making interaction between the field and the Mission Support Center was studied. This article introduces the AMADEE-18 mission and provides the mission-specific context for the other contributions of this special issue.
1. Introduction
Human/robotic Mars missions are envisioned for no earlier than the late 2030s, including surface sojourns of at least 1 month (Drake et al., 2010). Since the Apollo-era, analog studies have supported planetary surface missions (Preston and Dartnell, 2014) as an effective and efficient tool to prepare for future missions to Mars. Mars analogues on Earth are used to understand processes on the Red Planet from a scientific point of view (Wentworth et al., 2005; Michalski and Niles, 2011), optimize operational workflows (Losiak et al., 2014), and test field equipment and human factors in a representative environment. Such past analog campaigns include initiatives such as the NASA Desert Research and Technology Studies (D-RATS) field simulations conducted between 1997 and 2010 (Abercromby et al., 2013; Ross et al., 2013), the NASA HI-SEAS long-duration missions (Binsted and Hunter, 2013 and Binsted and Manoa, 2015), the MOONWALK project (Imhof et al., 2015), the NASA NEEMO underwater missions, the ESA CAVES missions (Bessone et al., 2015), and the NASA BASALT mission (Thomas et al., 2016) among others. There are numerous locations on Earth that can be studied as Mars analogues, for example, for the CAFE study (Preston et al., 2012), that constitute an extensive list of current Mars analog sites on Earth.
So far, the Austrian Space Forum (Österreichisches Weltraum Forum [OeWF]) has conducted 12 multi-institutional Mars analog field campaigns since 2006 as part of the PolAres Program. Their aim was to identify research gaps in exploration roadmaps such as the Global Exploration Roadmap (GER) of the International Space Exploration Coordination Group (ISECG), the NASA Mars Reference Architecture (DRM 5.0), initiatives such as the Mars Exploration Robotic Programme (MREP) of the European Space Agency, or the more recent NASA AM mission architectures (Thronson et al., 2018). With a focus on the surface elements in such efforts, geoscience and astrobiology were identified as design drivers for the OeWF PolAres program. The balance between human and robotic activities and an efficient and safe remote science support (RSS) strategy are considered critical elements for mission architecture.
Missions of the OeWF were conducted in diverse locations (1) that are representative of average current Mars conditions such as the Morrison Formation in southern Utah in 2006 (Groemer et al., 2007) and the northern Sahara near Erfoud, Morocco, in 2013 (Groemer et al., 2014), (2) that resemble the early and wet Mars-analog site of Rio Tinto Spain in 2011 (Orgel et al., 2014), and (3) that include subsurface exploration simulations at Dachstein Ice Caves in 2012. These OeWF field missions totaled nearly 100 experiments and engineering tests in the fields of astrobiology, robotics, human factors, geoscience, and spacesuit operations. Most of these experiments were performed in cooperation with international partners. Major recurring assets include two Aouda-class spacesuit simulators (Groemer et al., 2012), field infrastructure for time-delayed communication, and a Mission Support Center infrastructure.
AMADEE-18 is the most recent field expedition, where a carefully selected crew of 16 researchers and engineers and roughly 200 team members from 25 nations were involved. The mission took place in the Dhofar governorate in the Sultanate of Oman from February 1 to 28, 2018.
This article first describes the mission architecture, infrastructure, and the test site, and includes an overview of the Mission Support Center architecture (Section 2). This is followed by descriptions of the experiments and a reference to other articles in this special collection (Section 3). In Section 4, we introduce the “Exploration Cascade” as an innovative approach to combining the workflows of the experiments, as well as an analysis of the mission performance and lessons learned (Section 5).
2. Methods and Infrastructure
2.1. Mission objectives and programmatic context
AMADEE-18 was the first mission of the decadal AMADEE program, which provides a framework that focuses OeWF analog missions on the search for life on extraterrestrial planetary bodies. This is realized through an “Exploration Cascade,” which is a workflow that defines the deployment sequence of the experiments to optimize the search for putative biomarkers. The Exploration Cascade is described in detail in Section 4.
In addition to this astrobiology focus, the AMADEE program entails a long-term strategy that ensures the transfer of knowledge through the Science Data Archive, the lessons learned, and the standing international teams of the OeWF. With analog missions planned every 2 to 3 years, these measures also enable a programmatic evolution from each analog mission to the next one.
The AMADEE-18 objectives were to study operational workflows of a human/robotic Mars mission and experiments pertinent to future flight missions (Beaty et al., 2005). It not only served as a testing platform for human factors observations, geoscientific techniques, and engineering experiments, but also to study the test site for its analog potential. Quantifiable milestones and measurable success criteria were evaluated by means of the Analog Mission Performance (AMP) metric postmission (Section 4). Furthermore, by implementing the Vienna Statement on Analog Planetary Research (VSAPR, signed by more than 20 institutions involved in analog research), the AMADEE program promoted awareness about analog planetary research.
2.2. Field campaign preparation
The campaign preparation started 30 months before the campaign execution, largely based on experience gained during preceding campaigns (Groemer et al., 2016). A series of on-site scouting missions were carried out between March and October 2017 by the AMADEE-18 leadership team, scientific support staff, and members of the Omani National Steering Committee. The scouting missions included candidate sites in the governorate of Dhofar, Oman, which were examined in situ and assessed against geological, geophysical, logistic, and operational requirements, taking into account photographic and cartographic data sets, soil sample analysis (e.g., grain size distribution and abrasive properties), and meteorological parameters such as projected temperatures, wind, and light conditions.
For an analog planetary mission of the complexity of the AMADEE series, seamless interoperability between the field crew, mission support crew, remote science teams, and on-site support was perceived as a critical success factor. To guarantee interoperability across all areas of expertise, a two-stage interdisciplinary training was introduced. The “Analog Mission Basic Training” and the “Analog Mission Advanced Training” courses were multiday training units mandatory for mission support crews. The field crew underwent campaign-specific training. The entire campaign staff, which comprised ∼200 individuals and included external experimenters, met for 3 large multiteam training units as follows: an AMADEE-18 Qualification and Operations Rehearsal, a Procedure and Contingency Dress Rehearsal, and a Scientific Dress Rehearsal. These training units allowed for an incremental integration of training, know-how-sharing, and team building that led to an increasing level of efficiency.
2.3. Geological context of the test site
The study area was located in the Sultanate of Oman, Arabic Peninsula, in the northeastern part of the Dhofar region, ∼130 km northeast of Thumrait (Fig. 1) between 55° and 56° east and 18° 30′ and 18° 40′ north. The selected outcrop covered an area of 300 × 300 km in the Dhofar desert plain.
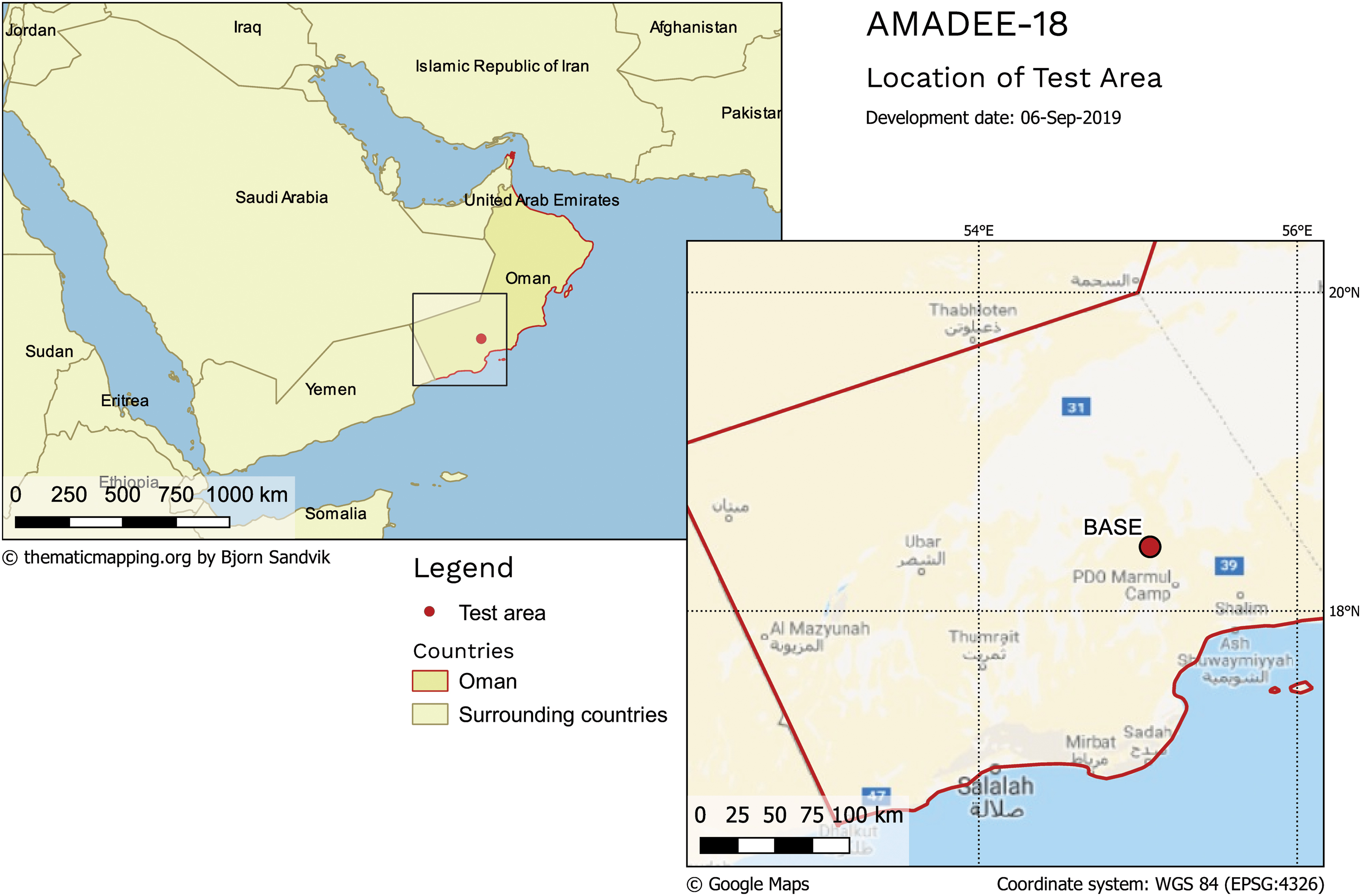
Location of test area and the AMADEE-20 of the Kepler Base Station at 18,4232 N/55,04330 E at an elevation of 250 m a.s.l. Color images are available online.
The test area was in the South Oman Salt Basin syn-rift deposits. These are dominated by the Southern carbonate combined with the Deep basin elongated area of the Huqf Supergroup sediments from the Precambrian/Cambrian boundary (Rollinson et al., 2014). Several quaternary deposits of alluvial fans were found. These unconsolidated sediments are present together with other outcrops and range in size from several centimeters up to 1 m of silicified dolomites and organic-rich laminated chert (silicilyte) that belong to the Ara formation (Platel and Roger, 1989). Furthermore, these alluvial fans are mostly composed of sand, pebbles, and boulders and are cemented by poorly rolled clasts covered with a thin dark oxidized coating (Yuan et al., 2016).
The feeding area of the sediments for the alluvial formations comes from the north-northwest region and is, in essence, a product of erosion and meteorization of Oman Mountains outcrops and the Huqf Supergroup sediments. On the contrary, a part of the aforementioned nonconsolidated sediments of the alluvial deposits include volcanic rocks from alkaline to basaltic composition (Platel and Roger, 1989; Roger et al., 1989). The volcanic rocks are interbed samples of the Precambrian/Cambrian deposits: limestones and silicified dolomites, and fragments of hydrothermally altered and silicified dolomite-carbonates. In addition, the volcanic rocks include magnetite and sulfide mineralizations that are remnant products from hydrothermal processes at the Oman Mountains (Reuning et al., 2007). To our knowledge, the hydrothermalism present in the Dhofar area was vaguely studied and, according to other authors, the hydrothermal processes are related to magmatic actions with intrusion of late-stage veinlets where magma carried metals of magnetite and sulfides (Amthor et al., 2005). Other secondary alteration processes identified are supergene alterations on the site samples. From a rough petrological description and field studies, secondary mineralization of alunite, coesite, and montmorillonite in the sediments together with oxides and secondary chlorite is observed (Coleman and Bailey, 1974; Lepvrier et al., 2002; Ramseyer et al., 2013).
The analogy to Mars is in the massive clay-, carbonate-, and likely sulfide-bearing deposits in several locations on Mars. Indeed, the existence of a possible similar basin formed from a water hydrothermal environment and magmatic activities on ancient Mars >3.8 billion years ago has been reported (Chevrier and Mathe, 2007; Michalski et al., 2017). Among the mineralization reported, noteworthy detections include talc, talc-saponite group, Mg-bearing nontronite, glauconite, and serpentine (Chevrier and Mathe, 2007; Michalski et al., 2017). These minerals, clay assemblages, and secondary mineralizations are all common in specific terrestrial outcrops that serve as terrestrial analogues such as the Dhofar desert. Also, the alteration processes from ancient volcanic activities can be related from the mineralogical detections of past and present rover missions (Yen et al., 2017 and therein). In this regard, the Dhofar mineralogy could provide clues and potential biomarkers about the past and present specific environments on Mars, particularly whether Mars was suitable to sustain life.
2.4. The AMADEE-18 mission architecture
The AMADEE-18 mission had two core elements as follows: (1) a base station (the “Kepler” station; see Fig. 2) in the Dhofar desert with 16 crew members in isolation, representing the Mars surface segment and (2) a Mission Support Center in Innsbruck, Austria, representing the ground segment of the project (Fig. 3). The latter included the Flight Control team (FCT), which observed the (10-min time-delayed) telemetry data from the field. This unit was managed by a Flight Director, whose team interacted via a single point of contact (“EARTHCOM”) with the field crew. The FCT included medical personnel for monitoring the field crew health, especially during EVAs, a procedures officer (“PROCEDURES”) who observed compliance with experiment protocols, and a liaison officer (“CONTACTS”) who served as a single point of contact for external support teams and researchers. In addition, a “RECORDS” position ensured a chronological recording of mission-relevant events, in the field, in the MSC, and externally.

AMADEE-18 test site where samples were taken for laboratory analysis (Kepler station in the background, viewing direction is toward west, credit: OeWF/Florian Voggeneder). OeWF, Österreichisches Weltraum Forum. Color images are available online.
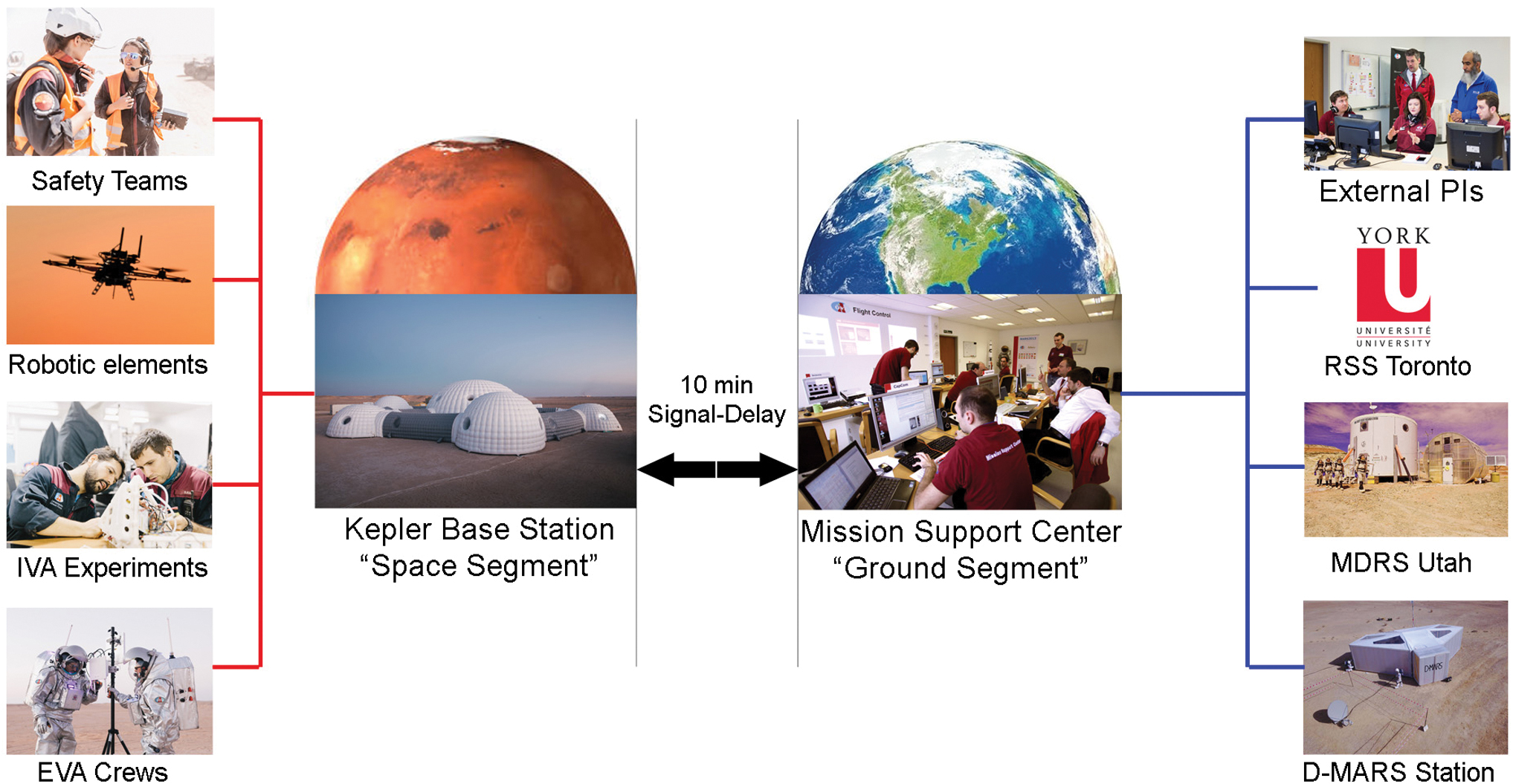
The AMADEE-18 mission architecture; IVA included conducting experiments including sample procurement, as well as housekeeping and technical maintenance. IVA, intravehicular activities. Color images are available online.

The Kepler base station, hosting the 16-person field crew. This infrastructure was specifically designed and deployed for the AMADEE-18 mission. In a radius of 5 km, no access from the outside was permitted (photo: OeWF/Florian Voggeneder). Color images are available online.
Two core elements of the MSC were the flight planning (“FP”) team and the “RSS.” Complementing this operational branch, the FCT was supported by a Science Data Officer (“SDO”), a dedicated IT team, and the administrative group.
2.4.1. MSC/RSS
The interdisciplinary RSS team linked the experiments' principal investigators (PIs) with the mission's operational personnel. Before the field deployment, they supported the external PIs in the preparation and established an understanding of the experiments' scientific objectives. This understanding enabled them to represent the PIs and to tackle basic questions that arose during the operations on behalf of PIs. The RSS team also coordinated the OeWF internal experiments and was responsible for postmission laboratory analysis of the geological samples collected by the analog astronauts.
During the AMADEE-18 mission, the RSS team was split into two groups. One group was located in the Mission Support Center in Austria and handled operational requests by other MSC teams (Fig. 3). The other group assisted the operations remotely from Toronto, Canada. This team handled the longer term questions that required in-depth analysis and research and performed a preliminary analysis of field data from Oman.
2.4.2. MSC/FP and geodata workflow
The process of FP was crucial for managing field resources and maintaining an efficient schedule to maximize the scientific output while observing operational constraints. Such constraints included available crew-time, safety regulations, and mission rules.
The basic planning process of AMADEE-18 was similar to that of the preceding OeWF missions MARS2013 (Hettrich et al., 2014) and AMADEE-15 (Groemer et al., 2016) and used a 3-day advance planning workflow. Before mission start, the FP team compiled the respective experiment requirements, such as time, personnel, power, bandwidth, and terrain. Based on this, the general mission architecture and the main operational constraint activities were scheduled in the Mission Plan (MP). Based upon the MP, the plans were refined in the so-called Field Activity Plans (FAP), which specified the field crew's time line for each day in 15-min increments. As the mission progressed, the deviations between MP and FAP increased due to the accumulated effects of unscheduled or external events, such as dust storms or technical anomalies.
The FAP-directed experiment locations as well as related traverses that met operational constraints were communicated to the field crew via the Traverse Plan (TP). For the development of this plan, in contrast to the previous missions MARS2013 (Losiak et al., 2014) and AMADEE-15 (Groemer et al., 2016), a more elaborate geodata workflow was implemented (Sejkora et al., 2018). During previous missions, TPs were created by using Google Earth, accepting several shortcomings (Losiak et al., 2014). For AMADEE-18, a central server with GeoServer software stored all geodata and made them available to clients by using the Open Geospatial Consortium standards. QGIS was used (QGIS 2.18, QGIS Development Team, 2016) as a client software. Versions of one TP could be shared as read-only copies, which were automatically transferred to the field server with a 10-min delay. The most recent version of each day's TP was automatically displayed in the head-up display of the spacesuit simulators to enable efficient navigation during an EVA.
The TPs were developed together with the FAP several days before their execution. This allowed findings from previous mission days to be incorporated in future plans. The most important source of information in this respect was the logged GPS positions of the spacesuit simulators, which were also available in the MSC via GeoServer. This may be one advantage of our approach in contrast to other planning strategies, such as the one used by the NASA D-RATS for the 2010 field simulation (Hörz et al., 2013), where they developed all TPs before mission start.
The base layers for all developed plans included an optical aerial image with a resolution of 0.5 m and a digital elevation model with a resolution of 5 m, both covering a radius of >10 km around the base station, provided by the Oman National Survey Authority. In addition, to achieve a higher temporal resolution, data by Planet (PlanetTeam, 2017) were used, which has a high update rate at a resolution of 3 m.
A formatted map that showed the TP for a specific day, including a list of coordinates for all points of interest and expected travel times between them, was transmitted to the field as well for quick reference. This map, together with the FAP for that day and some additional information, such as a weather forecast, formed the Daily Activity Package.
2.5. Field infrastructure
The AMADEE-18 field station “Kepler” was based upon a custom-built inflatable dome structure, complemented with rigid container elements for crew quarters, hygiene facilities, and the operations module. The infrastructure included a power grid with a redundant generator output of 450 kW and a symmetric data link at 20 Mbit/s. The Kepler station offered space for a greenhouse, science containers, storage containers, and workshops that included additive manufacturing capacity, and a medical infirmary. In addition, a mess and kitchen modules were available.
On-site mobility included two electrical vehicles (Ziesel—experimental tracked vehicles), three all-terrain vehicles, and four off-road SUVs. The base station communication was designed to be robust and included W-LAN connectivity (allowing for voice-over-IP communication); satellite telephone; regional TETRA radio systems connected to a civilian emergency call center in Muscat, Oman, and the military checkpoints securing the area; HAM radio stations and mobile devices; as well as PMR radios. Depending on the risk profile, all EVA crews were connected via at least two independent communication loops (Beaton et al., 2018).
Core elements of the missions included two Aouda spacesuit simulators capable of emulating the restrictions of an actual planetary surface spacesuit. Based upon 11 previous missions, the OeWF had accumulated a total of 747.5 EVA-hours, leading to significant experience in conducting analog EVAs.
3. The AMADEE-18 Experiments
The A-18 experiments were selected in a four-step external peer-review process that affirmed expertise of the submission, scientific and engineering merit (methodology, technological readiness level [TRL]), alignment with OeWF programmatic considerations, and test-related risk. The selection of science activities was complemented by nonpeer-review research activities and junior researchers' experiments. The following experiments were selected for AMADEE-18 (Table 1).
Overview of Selected Experiments for AMADEE-18
RSS = Remote Science Support.
4. Science-Based Workflows: The Exploration Cascade
4.1. Motivation for the Exploration Cascade
To maximize the scientific output and have robust and reliable workflows, future human Mars missions need to be properly planned from the scientific tactical planning point-of-view to (1) establish an unambiguous geoscientific context, (2) avoid false positives or contamination regarding the search for biomarkers, and (3) have an established workflow to efficiently deploy instruments at the right location at the right time and lead to the right questions answered in the right step in the operational decision-making flow. Hence, the authors suggest an “Exploration Cascade,” adapted to the respective mission goals, that would use a methodology already used during mission preparation and simplify daily tactical FP during the mission.
During previous analog missions managed by the OeWF, the mission leadership noticed a compartmentalized approach of the PIs with a deficiency in (1) understanding the science case of the other experiments and (2) identifying overlaps of interest and synergy potential. Similar observations were made during previous D-RATS missions, where the RSS team and the operational lead were split into two separate teams (Yingst et al., 2013). Consequently, there emerged a risk to neglect complementary data sets or miss on the hypothesis building of the respective experiment team if the data fusion and hypothesis building only happened postmission. Therefore, the Exploration Cascade was designed to provide near-real-time tactical science support before and during the mission. It embodies the mission's objectives and intended data output and required instruments and techniques across instruments. The Cascade provides a generic overview into the experiment's execution times, those resources needed, and assessments as to what type of decision-making is available with confidence at any given point in the mission workflow.
Along with tactical advantages, an Exploration Cascade offers more structure to future (analog) missions, including increased efficiency, avoidance of redundant data acquisition, and a fostering instrument team collaboration.
4.2. The Exploration Cascade
The AMADEE-18 Exploration Cascade (Fig. 5) is understood as a process flow, starting with the (orbital) remote sensing phase well before the ground crew arrives. The objective is to identify regions of interest similar to current landing site definition workflows. An example would be using data sets from MRO/SHARAD (Seu et al., 2004) to identify subsurface ice deposits. Additional data provided by, for example, aerial reconnaissance or landers narrow the definition of the (paleo)geological environment, such as identifying sedimentary structures at higher resolution and the physical characterization of the ground (e.g., temperatures, radiation, ground moisture).

Conceptual example for a segment of the Exploration Cascade as realized during the AMADEE-18 expedition to field test the methodology of the cascade. Color images are available online.
In Phase 2, before the arrival of humans on the surface, priority is given to remote sensing techniques with increased resolution, such as a Remote Micro-Imager (Gasnault et al., 2016), LIDAR, or IR imagers, as well as a combination of remote spectroscopic techniques, followed by compositional techniques such as Raman LIBS, LIF spectroscopy, RLS, UV spectroscopy, and the Mossbauer spectroscopy technique (Angel et al., 2012). Up to this point, this corresponds to traditional surface element deployment workflows, although with more assets than usually deployed in a single mission.
Once the humans arrive (Phase 3), a near-real-time analysis provides tactical decision-making support for the RSS on Earth. Unlike the case for robotic missions, timing becomes more critical due to human-specific operational constraints (e.g., the need to return to a base station after an EVA) and multiple robotic assets. Hence, the question evolves as to which step in the data acquisition triggers which input for hypothesis building. This depends on the immediate instrument data delivery and transfer architecture to a base station or Earth and is also subject to the capability in a RSS backroom to confirm data integrity and quality for analysis and formulation of a robust interpretation, potentially leading to hypothesis building. This knowledge then feeds into the operational segments of such a mission, for example, FP and ultimately the FCT communication back to the field crew. However, such a cycle needs to be carefully designed to synchronize the FP algorithm and the scientific process that traditionally work on different timescales.
Basic exploration decisions, such as starting with nondestructive measurements (e.g., obtaining environmental data and spectra) before removing rock samples from their context become more convoluted, are to be made carefully as more assets are deployed in the field. Multiple agents (e.g., several astronauts, rovers, copters, instruments) in complex mission architectures produce dependabilities in a (compared with a single-vehicle robotic mission) fast-paced environment. This might overload traditional mission architectures and needs to be well planned at least until the departure phase of the human mission.
After the experiment selection process concluded, a draft Exploration Cascade provided information on projected data harvests and timings. During the planning period, single targets and instrumental requirements, expected data outputs, required ranges, and so on were added to the Cascade revealing critical paths and dependencies. Step by step the instruments and experiments were added to the Cascade, identifying tactical weaknesses and balancing the workloads between the space and ground segment.
5. Selected Results and Lessons Learned
5.1. Experiment article overview
A total of six additional AMADEE-18-related articles that summarize the AMADE-18 experiments are presented herein as follows (other experiments were published outside this issue).
McMenamin discusses “Team Processes and Outcomes During the AMADEE-18 Mars Analog Mission,” which is a synopsis of the psychological observations TEAM and SIT-AS (McMenamin et al., 2020, this issue), except for the MIMIC experiment that focuses on stress markers in voice patterns.
Gruber et al. (2020, this issue) provide a methodology for evaluating the AMADEE-18 mission performance parameters in the article “AMADEE-18 and the Analog Mission Performance Metrics Analysis: A Benchmarking Tool for Mission Planning and Evaluation.” This article proposes a transferrable general workflow for assessing the efficiency and effectiveness of analog missions.
The AMADEE-18 samples were analyzed postmission, whereas the results of this geochemical analysis are described in “Laboratory Analysis of Returned Samples from the AMADEE-18 Mars Analog Mission” (Lalla et al., 2020, this issue).
“AMADEE-18: Vision-Based Unmanned Aerial Vehicle Navigation for Analog Mars Mission (AVI-NAV)” (Allak et al., 2020, this issue) describes a GPS-free navigational method with relevance to the Mars 2020 mission to Mars in 2020. Field data obtained with a custom-modified copter served as a test bed for a vision-based navigation system under realistic conditions in the Dhofar desert.
In the article titled “The ScanMars Subsurface Radar Sounding Experiment on AMADEE-18” (Frigeri and Ercoli, 2020, this issue), the feasibility of using an astronaut-operated georadar is demonstrated, including the detection of a subsurface wadi-structure at the test site.
5.2. AMP metric analysis
The AMP metric is an algorithm that provides a quantifiable measure for the performance of an analog mission through predefined performance parameters. The data to evaluate those parameters are collected via a standardized questionnaire, which yields the scores for the main Key Performance Indicators Complexity and Fidelity, as well as a quantitative assessment framework. The AMP metric is used to identify opportunities to enhance the missions. It also allows for a comparison with other analog missions across disciplines and agencies.
The AMP analysis is described in this issue (Gruber et al., 2020).
5.3. AMADEE-18-specific lessons learned
Besides technical lessons learned that are hardware-specific (such as a the physical strain of the Thermal Control Systems of the spacesuit simulator working at the edge of their operational capabilities as the temperature peaked as much as 8–10°C above the 5-year averages), there are key lessons learned, which include the following observations: The application of the Exploration Cascade as a conceptual tool to determine the best deployment modality of instruments was demonstrated. However, the need for the respective experiment teams to be physically present in the MSC to join the scientific discussion in near-real time was not fully implemented, nor was there a structured dialogue or decision-making within the RSS team, which led to a loss of efficiency. Hence, the data interpretation workflow needs to be detailed with standard operating procedures unlike in a traditional academic environment. It is advisable to only accept experiments with a sufficiently mature TRL. The integration and “last steps” developments during the deployment phase may jeopardize the functionality of an experiment, compromise field crew time budgets, and create risks. Hence, a well-structured, onboarding process is advisable for experiment teams to enable a smooth integration into a complex mission such as AMADEE-18. A well-trained RSS team is vital to a near-real-time assessment of field data. Requiring experiment teams to be physically present at the MSC was not enforced and led to a loss of information and ad-hoc operational decisions based upon an incomplete understanding of the experiment. A split RSS with an MSC-based team working in a similar time zone as the field crew, as well as a Canadian RSS team with an 8-h time-zone offset, enabled an almost 24-h science support for the mission. However, geographic diversity in participating members and the research teams required a well-defined communication workflow. Implementing a QGIS/GeoServer-based geodata architecture connected to the base station IT and the spacesuit simulators proved very powerful. It allowed for a precise planning of traverses (including determining expected loss-of-signal travers segments) and an accurate navigation to the locations for the experiments. In addition, the spacesuit simulators on EVA could be tracked by the Mission Support Center. The deployment of field-ruggedized 3D printers in the habitat turned out to be of great value beyond the ADAPT2MARS experiment to refabricate damaged equipment parts. This was enabled by having a standby 3D design team working on print files. A regional institutional partner (such as the Oman Astronomical Society) turned out to be vital for obtaining proper research licenses and working with authorities. Forming a national steering committee allowed for a connection with partners well before the mission and created nation-wide support for the mission in the general public, with industrial sponsors, authorities, and the national scientific community.
Footnotes
Acknowledgments
The AMADEE-18 project team greatly acknowledges the contributions of the Oman National Steering Committee, in particular H.E. Khattab Al Hinai and Saleh Al Shidhani. AMADEE-18 was supported by the European Space Agency, the Austrian Federal State of Tyrol, and the Oman Research Council, industrial partners, including the Petroleum Development of Oman, T-Mobile Austria, Oman Broadcast, Oman Air, Oman LNG Development Foundation, Oman Data Park, Azyan Telecom, Strabag, the Oman Public Authority for Radio and Television, Omantel, Bahwan Projects and Telecoms LLC, Suhail Bahwan Group, Occidental Petroleum Corporation, Orpic, Mideast Data Systems, Oman Data Park, Round LLC and Oman Fibre Optic. Site security was provided by the Oman Ministry of Defense, in particular the Royal Navy and the Royal Air Force, significant assistance in regulatory, diplomatic, and customs matters was provided by the Oman Ministry of Foreign Affairs.
The AMADEE-18 leadership greatly acknowledges the contributions and dedication of more than 200 project members and volunteers from 25 nations.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
The project was funded by the Austrian Space Forum under the AMADEE research framework, the individual experiment fundings are declared in the respective papers.