
Abstract
The purpose of this article is to reopen from a practical perspective the question of the extent in altitude of Earth's biosphere. We make a number of different suggestions for how searches for biological material could be conducted in the mesosphere and lower thermosphere, colloquially referred to as the “ignore-osphere” because it has been generally ignored in the meteorological community compared to other regions. Relatively recent technological advances such as CubeSats in very low Earth orbit or more standard approaches such as the rocket-borne MAGIC meteoric smoke particle sampler are shown as potentially viable for sampling biological material in the ignore-osphere. The issue of contamination is discussed, and a potential solution to the problem is proposed by means of a new detector design that filters for particles based on their size and relative velocity to the detector.
1. Introduction
The physical pervasiveness of life and its associated biological structures around Earth has been an open and much-discussed question for centuries. The idea that Earth might be a source of living material in the Solar System, and beyond, has both practical and philosophical implications. In terms of pure ecology, the maximum altitude at which life might be found is an important question in its own right as it defines the Earth system's physical extent as a habitat. An example of a practical application is in exploring the upper atmosphere as a possible transport mechanism for pathogenic microorganisms around Earth (Brown and Hovmøller, 2002; Bebber et al., 2014). Furthermore, it has been suggested that if biological particles can be found in the thermosphere, then hypervelocity space dust has sufficient momentum to facilitate the planetary escape of such particles, which leads to astrobiology implications in the form of the transport of biological material beyond Earth (Berera, 2017). There has been no concerted research effort placed on the mesosphere and thermosphere by the astrobiology community, despite this interest (Smith, 2013; Dassarma et al., 2020; Šantl-Temkiv et al., 2022). The concept of the biosphere was first introduced by the geologist Eduard Suess in 1875 as the surface on Earth where life can be found (Suess, 1875). This was later extended by the Russian polymath Vladimir I. Vernadsky to be any complete system which encapsulates life (Vernadsky, 1998). As the word implies, a biosphere has boundaries beyond which life cannot be found. Therefore, it is at the boundaries of the biosphere that one finds life at the extremes. Research has established the existence of life at extreme temperatures within volcanoes and in the arctic, at extreme pressures in the deep ocean, and in high-radiation environments (Clarke et al., 2013; Krisko and Radman, 2013; Richard et al., 2020). Certain life-forms have even been shown to survive in the space environment (Moissl-Eichinger et al., 2016; Kawaguchi et al., 2020). The extent of the biosphere in the upper atmosphere, that is, the existence of life at extreme altitudes, remains comparatively little explored.
In certain meteorological circles, the mesosphere and lower thermosphere (MLT) is colloquially referred to as the “ignore-osphere” because its unique position makes it inaccessible via balloons and conventional aircraft due to the low air density. It is also inaccessible for satellites as there is still sufficient air for drag to be non-negligible (Stern, 2010). Thus, until recently, the only viable sampling option has been to use sounding rockets. In the last decade, new possibilities for sampling have arrived, such as small inexpensive CubeSats and low Earth orbit commercial spacecraft (Virgili-Llop et al., 2014; Saeed et al., 2020).
The highest altitudes where life seems to have been plausibly established are the top of the troposphere and the lower stratosphere (Bryan et al., 2019; Dassarma et al., 2020; Šantl-Temkiv et al., 2022). However, studies deeper into the stratosphere remain controversial due to questions of contamination. In a recent review, Šantl-Temkiv et al. (2022) emphasized that caution is required when interpreting findings in studies where decontamination measures are not fully reported. Earlier studies do not fully report decontamination measures or evaluate the issue compared to modern standards. However, there is a consistent literature dating to the present which reports micrometer-sized particles in the stratosphere, for example Rosen (1964), Heintzenberg et al. (2003), Xu et al. (2003), Yin et al. (2012), Ursem (2016), and Šantl-Temkiv et al. (2022).
Additional studies found that these particles include bacteria (Wainwright et al., 2003; Griffin, 2004; Ursem, 2016; Šantl-Temkiv et al., 2022). The most recent observational campaign of the stratosphere found two bacterial species, Bacillus simplex and Staphylococcus pasteuri, and a fungus, Engyodonitium album, at 41 km (Wainwright et al., 2003).
The purpose of this article is to reopen the question of what the upper limit of Earth's biosphere is with practical calculations and suggestions for field campaigns. Our article builds on the preexisting observations of the lower atmosphere and on recent work that has identified strong vertical winds, among other mechanisms such as volcanic eruptions, as capable of ejecting nanometer-sized particles into the MLT (Berera, 2017; Berera and Brener, 2022).
The highest altitude mission that sought to determine the extent of the biosphere was conducted in 1974 by Imshenetsky et al. of the Institute of Microbiology, USSR Academy of Sciences (Imshenetsky et al., 1978). They used sounding rockets fitted to capture microbiological samples up to 77 km in the mesosphere. They reported finding fungal spores. These findings are the only published study of these altitudes, and therefore there remain concerns about contamination. We propose a new approach to address these questions. Only through multiple and independently run studies will it be possible to settle concerns around contamination, as was done for determining the existence of life in the deep ocean (Gronstal et al., 2009; Escudero et al., 2018).
Samples from the surface of the International Space Station have been found to have DNA from several kinds of bacteria that were genetically similar to those found in the Barents and Kara Seas' coastal zones (Grebennikova et al., 2018). It was proposed that the wild land and marine bacteria DNA could transfer from the lower atmosphere into the ionosphere-thermosphere using the ascending branch of the global electric circuit. However, a more likely explanation would be contamination due to spacecraft passing through the lower atmosphere. Atmospheric transmission of microbes has also been postulated as one of the mechanisms behind Antarctic microbial diversity changes (Pearce et al., 2009).
2. MLT Sampling Methodologies
2.1. Standard approaches
Since the late 1940s, there have been rocket sampling missions to high altitudes (Martell, 1970). These initially involved the use of evacuated steel bottles with an altitude-triggered opening and closing mechanism. Vacuum tubes are a valid method for directly sampling the upper atmosphere, but they are limited in terms of temporal and volumetric capacity.
With the advent of the Cold War, it became imperative to sample the upper atmosphere for radioactive fallout during nuclear weapons tests. To capture enough of these particles, larger volumes needed to be sampled, which led to the development of the first cryogenic samplers such as the ENCAR-1 (Denton, 1970; Martell, 1970). Prior contamination of such a sampling device is readily detectable via a Geiger counter, and there are no large natural sources of radioactive material in the atmosphere. Hence, these earlier studies had little with which to contend with respect to contamination (Martell, 1970).
The only direct searches for biological material in the MLT were conducted by Imshenetsky et al., who used a specially designed sampler located in the nose cone of a sounding rocket (Imshenetsky et al., 1978). These authors assumed that the rocket's outer casing would experience temperatures > 1000 K that would act as an ascent sterilization. While this is correct in principle, aerodynamically modeling the heating profile for the rocket is the only way to be certain. The assumption by Imshenetsky et al. (1978) that the heating was uniform and therefore the sterilization would also be is a flaw in their contamination strategy.
Since the missions by Imshenetsky et al. (1978), there have been no further samplings of the MLT conducted that looked directly for biological particles. This led the aerobiology community to conclude that 77 km is the maximum empirically defined extent of the biosphere in altitude (Horneck et al., 2010; Smith, 2013). The review by Smith (2013) criticized this conclusion as Imshenetsky et al. (1978) neglected to give details on contamination precautions other than the aforementioned drag heating of the rocket exterior or the sealing of the samples in flight (Smith, 2013). It is crucial that future field campaigns report clearly and transparently all procedures used, even those considered routine.
The MLT has been studied by those trying to understand meteoric smoke and the formation of noctilucent clouds. The most relevant to our work is the MAGIC meteoric smoke particle sampler (Hedin et al., 2014). Meteoric smoke particles are neutrally charged and nanometer in size, making them challenging to detect. Berera and Brener (2022) hypothesized that MLT large vertical winds could potentially be strong enough to push particles of this size to around 120 km in rare events.
This problem of the air density is a question of whether the flow is in the continuum limit. Physically, this corresponds to whether the particles are dominated by individual molecular collisions, such as in Brownian motion, or by the larger-scale fluid dynamics. This is determined by the number density of the air molecules with respect to the characteristic length scale of the object in the flow. MLT flow conditions range from the transition region between continuum and noncontinuum to the free molecular flow regime (noncontinuum). The rarefaction of a gas that interacts with an object with characteristic size L can be described by the Knudsen number, Kn =
In the MLT, Kn ranges from 0.1 to 10,000; hence, any direct flow measuring instrument must be capable of dealing with both transition and free molecular flow, unless separate missions are conducted per regime. Flow conditions and momentum transfer also change depending on the sizes of particle considered. In the MLT, particles with L ∼ 10 nm interact enough with the surrounding rarefied gases that their interaction can be considered continuous (Hedin et al., 2007a). Most viruses have a radius of around 20 nm; therefore, if one only wanted to search for whole viruses and larger bacteria or fungi, simple continuum modeling may be appropriate. However, accurate modeling of the effect of the gas on heating the detector would need to be carried out.
2.2. New approach: Relative-velocity filtered sampling
Here, we propose a new technique for reducing the risks of contamination that affects sampling at high altitudes. A detector needs to be designed that can sample high volumes over long periods of time in order to have a reasonable chance of encountering a biological particle. Detectors that impede the airflow are not appropriate, as this will increase drag, reducing the flight time and thence the total sampled volume per mission.
For a detector that continuously samples a flow, the particles move with respect to the detector rest frame. We propose that most contaminants from craft interior and exterior will likely be approximately at rest with respect to the detector. Therefore, by eliminating particles which satisfy that criteria, one reduces an aspect of the contamination problem.
In terms of detector design, it is easier to apply this thinking by considering the velocities of the particles. Contaminants from the payload delivery system will have a velocity smaller than particles entering the detector as part of the flow generated by the motion of the rocket or orbiting craft. Contaminants are most likely to come from the exterior of the craft's surface, and due to the low density at these altitudes, they will take longer to reach velocities close to the mean flow.
Therefore, if the detector moves sufficiently fast, greater than an order of magnitude relative to the rarefied gas flow, then any particle that detaches itself from the exterior of the craft that enters the detector will have a slower velocity. This could allow for such a detector to be placed at a position other than at the head of the rocket. However, careful simulation and modeling would be required to ensure the correct relative velocity is selected for an accurate trigger action.
Figure 1 depicts a high-level schematic of the triggering process for taking a sample. Once the craft is at the selected sampling altitude, the sampling probe should open to allow the air to pass through it. After some short time, the triggering mechanism is activated. To detect a particle of interest to capture, a small lidar system could be used to scan the incoming flow in the tube detecting both particle size and velocity. The triggering computer will have two options. It can either allow the flow to continue through the detector or it can close a valve, forcing the flow to pass into a sampling chamber where particles can be captured. The decision tree is
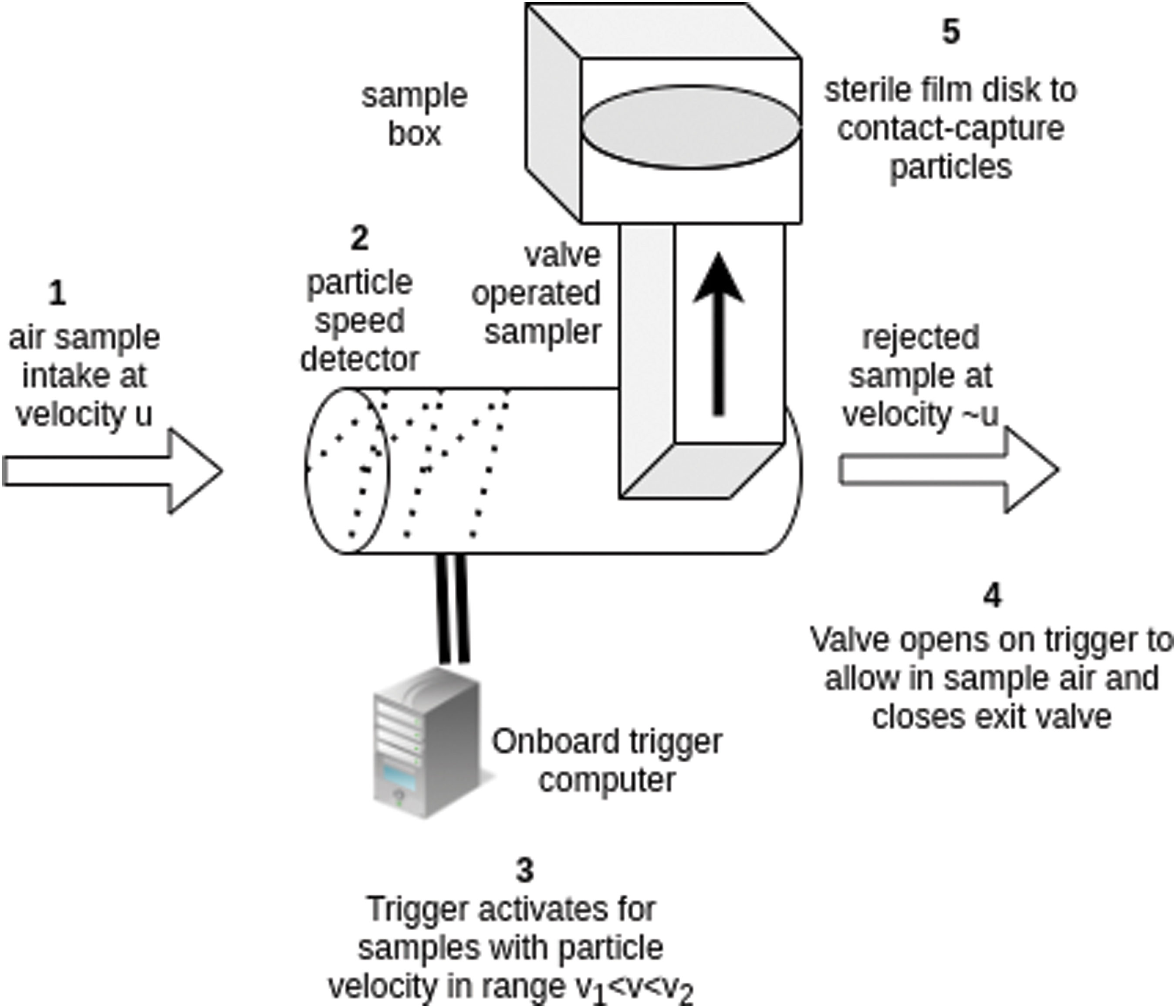
Trigger mechanism key stages.
IF v < u: valve open, particle is rejected from analysis
IF v ∼ u or v > u AND size > 10.0 nm: valve close, particle accepted for analysis,
where u is the relative velocity between the analyzer and the air flow, which would approximately be Mach 3, and v is the speed of the particle detected by the lidar relative to the analyzer.
For an order of magnitude estimate of the scanning frequency and trigger speed requirements of such a detector, we assume the flow into the detector travels at 1000 m/s (approximately Mach 3, a typical sounding rocket velocity). This means that, for a particle with characteristic size of 1 nm, a detector of length 10 cm would have ∼100 μs to detect it, which is within the operating capabilities of circuitry.
Dyes that bind to specific proteins or nucleic acids (e.g., Sybr GREEN; Vitzthum et al., 1999) could be used to illuminate biological material. Currently, these take time to bind and illuminate, but in principle one could develop an instantaneously binding dye. The air could be sampled, sprayed, and then accepted/rejected for analysis based on the detection of fluorescence. An alternative procedure could be to spray the samples once they have been filtered by relative velocity, as a means of highlighting regions of interest on the film discs. A similar idea has been proposed not for detection of life but to eliminate contamination concerns by painting the exterior rocket surface with fluorescent beads to trace and identify contamination pathways (Juanes-Vallejo et al., 2011; Smith, 2013).
There are a number of engineering challenges, however, that would need to be dealt with. The crucial problem is that the detector must function for the transition and free molecular regimes. To do this, Direct Simulation Monte Carlo (DSMC) models of the detector would be required. This technique was used for the MAGIC detector experiments as well as the development of other MLT sounding rocket instrumentation (Hedin et al., 2007a). Secondly, the scanning device itself will be a challenge to engineers such that it can operate at high frequency and be relatively compact. There are a number of similar devices already developed for industry, as detecting small particles in a flow is a standard problem (see, e.g., Sudo et al., 2007).
However, this technique to mitigate contamination during sampling is only as good as the weakest point in a mission, from craft assembly through to post-sampling processing. These are specific challenges in microbiology due to the wide range of biomasses that need to be analyzed. This problem was tackled by Luhung et al. (2021), where the authors developed a four-stage ultralow biomass pipeline: amassment, storage, extraction, and nucleic acid analysis. They used several decontamination procedures, including a negative control, where they processed a sample collected with zero airflow into their detector for 1 min. Such a procedure should be implemented for our proposed technique.
The problem of contamination in low microbial biomass microbiome studies was thoroughly reviewed by Eisenhofer et al. (2018), and we strongly support the recommendations to minimize the influence of contaminant DNA in atmospheric sampling missions (Eisenhofer et al., 2018). Another approach to contamination control would be to deliberately introduce artificial contaminants, such as polystyrene spheres, onto the surfaces of locations from which contamination might occur. The detection of these spheres by the capture device would allow for contamination to be quantified and identified. Similar approaches are regularly used in deep subsurface microbiological drilling (e.g., Cockell et al., 2009), whereby fluorescent polystyrene spheres are added to the drilling mud to control for the internal contamination of core material. In summary, contamination can never be completely ruled out, as with other low biomass studies; but similarly to deep drilling and core recovery in low biomass environments, there are a number of ways to control and quantify the potential for contamination in the instrument, which would be a critical part of instrument design and development.
3. Mission Strategies
Firstly, we consider the use of sounding rockets, which could be used simply to repeat the experiments by Imshenetsky et al. (1978). Using a sounding rocket is beneficial as it provides a high sampling volume for relatively low cost. To zeroth order, even in the free molecular regime, the sampled volume will be given by the product of the flow rate through or over the surface of the detector with the sampling time. The flow rate to zeroth order is the surface area of the detector orthogonal to the flow product with the mean speed of the flow relative to the detector.
Assuming a relative velocity of 1000 m/s and a circular detector area of 0.007 m2, corresponding to a diameter of 10 cm, one finds a flow rate of ∼7 m3/s. A typical sounding rocket flight through the MLT lasts around 80 s, which would result in ∼560 m3 of sampled volume. To find one particle of biological material in such a volume would be a significant result in the MLT. The key factor in the total volume sampled is the time the rocket can spend in the MLT. Even just 20 min of horizontal flight at a fixed altitude would yield a sample volume of ∼8400 m3. There are groups working on sampling rockets capable of such flights (Strelnikov, 2022). While these calculations are extremely crude, they nonetheless demonstrate real potential for defining the biosphere even for extremely low particle concentrations.
One could devise a series of sounding rocket missions where the rocket cruises at a fixed altitude while sampling, at intervals of 10 km from 50–150 km. These should be launched months apart to avoid inter-launch contamination. Geospatial separation of the launch sites would also be ideal as Berera and Brener (2022) identified the poles as more likely to have biological material, since these areas experienced stronger vertical winds due to geomagnetic activity.
Of vital importance when considering the use of rockets is the aerodynamic design of the rocket and detector itself. This is to ensure that a steady, representative flow passes through the device and that when particles are selected for capture, blow-back is not an issue. Future work should examine ways to ensure that the particles captured at high speed have their momentum sufficiently arrested so that they stick to the sampler. These are crucial problems that have been around for some time in rocket-based sampling (Bird, 1988; Horányi et al., 1999; Gumbel, 2001; Hedin et al., 2007b).
Alternatively, CubeSats represent a significant advance in technology in the last decade. We propose an ambitious potential mission program that would use multiple CubeSats launched months apart to sample the upper thermosphere down to the lower thermosphere, prior to reentry. The commercial space industry has already developed CubeSats that can orbit for short periods in what is called the extremely low Earth orbit (ELEO) region, and there have already been field campaigns using multiple satellites to explore this region (Millan et al., 2019).
One example of such a CubeSat is the TSAT Globalstar ELaNa-5 ELEO satellite (ELEO-SAT), which has dimensions of 10 × 10 × 20 cm and an orbit velocity of ∼7 km/s (Voss et al., 2014). Using the same simple calculation method as before, this has the potential to sample ∼4200 m3 in 1 h. Without a propulsion system, it is not possible to control the altitude of the CubeSat, and any such system would add too much additional weight that would reduce the sampling time. Hence, the CubeSat rapidly decreases in altitude and, thus, cannot be used to sample a single altitude accurately.
However, there are two key benefits to CubeSats over conventional sounding rockets: firstly, CubeSats can sample for hours and even weeks, whereas rockets are limited to periods of minutes. Secondly, they sample the atmosphere globally, as they are in orbit. The ELEO-SAT is designed for atmospheric sampling between 120 and 325 km with over 600 orbits during the 5 weeks of flight time. To isolate altitude ranges, we suggest that a series of CubeSats should be deployed to sample different 100 km bands (e.g., 200–100 km).
In Fig. 2, we have illustrated the mission strategy. In phase 1, the CubeSat is launched and deployed by rocket. The CubeSat could be projected out of the rocket forward by an explosive charge so that it remains upstream of the rocket on its first orbit (∼90 min). For phase 2, the CubeSat will sample a region of atmosphere consistent with its orbital resonance as CubeSats can rise and fall by as much as 50 km in a single orbit (see, e.g., Fig. 16 of Voss et al., 2014).
CubeSat mission strategy core phases.
Alternatively, a single ELEO-SAT released from 400 km, traveling on average at 7 km/s for 325 km down to 120 km over 5 weeks (840 h), would have come into contact with approximately 105 m3 of air. Due to the high mixing rates at these altitudes, it is extremely improbable that the satellite could sample identical volumes of air.
CubeSats usually burn up in the mesosphere at around 110 km; however, it is necessary that the craft can be fully recovered. This could be achieved by using a commercially available system called a CubeSat Deorbit and Recovery System (DRS) (Carandente, 2014). The CubeSat DRS is a module that can be attached to the CubeSat containing a 1.2 m tension cone heat shield and parachute, all weighing <1.5 kg. This module is triggered to deploy the shield immediately prior to reentry (Carandente, 2014).
4. Discussion
It will never be possible to entirely rule out contamination from a human-launched craft. We would argue that this is not an issue for defining the upper limits of the biosphere because the increased distribution of microbiological material in the upper atmosphere and possibly into space caused by human activities is now most likely a fact. Even if we were to only consider this human-derived biological material, we could still ask: What is the extent of this material? Does the microbiology survive, and does it continue to replicate there?
If naturally occurring biology is to be found in the MLT, it is most likely to be on the scale of viruses, prokaryotes (bacteria and archaea), or possibly fungal spores (Imshenetsky et al., 1978; Berera and Brener, 2022). If one recovers viable biological material, then one could use such samples, together with the flight data, to better quantify the proportion of particles that are viable as a function of altitude. This could provide valuable data on microbial viability, survival, and destruction in the upper atmosphere.
Relative-velocity filtered sampling might also be applicable to searches for evidence of life on other planets. Conventional approaches require the landing of probes on the planet's surface, excavating the soils and performing analysis on samples (Anderson et al., 2012; Clark et al., 2021). Our proposal solves two problems: significantly reducing a major part of the contamination concerns and removing the requirement of landing a probe in order to sample for life. Of course, a land-based relative-velocity filter device would not eliminate the need for landing, although it could potentially reduce the need to move the probe around the planet. Using the natural winds to sample the biosphere is, in our opinion, likely to be a more efficient and lower-risk strategy than is currently achieved with rovers. An added advantage is that being at ground level, if there is any biology on the planet, it is more likely to be found closer to the surface, assuming the planet has a similar atmospheric structure to Earth (Smith, 2013; Berera and Brener, 2022).
5. Concluding Remarks
Defining the biosphere's extent in altitude is of interest to the microbiology and aerobiology communities and has implications for ideas in astrobiology. Few field campaigns have been conducted to empirically determine this upper extent of the biosphere, largely due to the difficulty of sampling the MLT. As with previous microbiological campaigns that have looked for life at the extremes, the contamination problem must be foremost in any effort to sample these remote atmospheric regions. We propose that a sampling device could detect the relative velocity and size of incoming particulates, thereby filtering sampled air to mitigate against self-contamination.
The main underlying feature of the relative-velocity-filtered sampling method we propose is that the particle of interest that is to be measured should be at a different relative velocity to the detector, thus eliminating contamination that may persist on the detector. The proposal in the present study is to utilize this method to look for biological particles in the upper atmosphere, above 100 km, which would be a novel discovery. The detector should be on a moving craft, such as a sounding rocket, satellite, or even a drone, which intakes the surrounding air at high velocity and then detects the particles of interest in flight.
We have investigated how such a device could be designed around a CubeSat craft in very low Earth orbit or in the nose cone of a rocket to enable sampling of the MLT. The ideas involve several engineering challenges, specifically around the rapid detection of particles using a lidar that is lightweight, small, and of sufficient temporal and spatial resolution. Other technologies yet to be realized may be more appropriate or in the future be developed, but the principle of using the relative velocity of individual particles in a flow will in general always be applicable.
Footnotes
Acknowledgment
The authors were supported by the United Kingdom Science and Technology Facilities Council, with Charles S. Cockell under grant ST/V000586/1.
Abbreviations Used
Associate Editor: Don Cowan