
Abstract
Background and Purpose:
Navigation of endolumenal devices, such as image rendering capsules, have been described for diagnostic purposes in the animal, and more recently, human models. In urology, the ureter is a prime lumenal structure that often needs to be explored for diagnostic and therapeutic purposes. A novel device using a flotation mechanism in a water-filled environment was developed and its navigation achieved with magnetic-aided guidance. The device was tested for propulsion and real-time control in the ex-vivo setting.
Materials and Methods:
An endolumenal bionic worm (EBW) with a magnetic core was developed and introduced into synthetic lumens (SL) and supermarket chicken lumenal structures. The latter involved the gastrointestinal lumenal tissue of supermarket chickens; ie, the ex-vivo equivalent of a ureteral substitute lumen (USL). Navigation was graded by achievement of the EBW in propulsion to premarked sites, ability to remain static when necessary, and trauma to the USL. The structures were observed under the microscope for breech after the exercises. Navigation was observed in 10 SLs and 10 USLs.
Results:
The EBW was successfully steered using the magnetic guidance system with hydroflotation. Observation of endolumenal surfaces did not reveal evidence of trauma in either model.
Conclusion:
Hydroflotation magnetic-aided endolumenal navigation (HMAEN) of a microdevice was achieved endolumenally with targeted real-time control and with no observed trauma to the structures. HMAEN could potentially be used to guide devices like the EBW to permit diagnostic and therapeutic ureteroscopy including biopsy of ureteral and renal pelvis lesions, thus ushering in the platform for the next paradigm in endolumenal urologic procedures.
Introduction
In urology, the ureter is a prime lumenal structure that often needs to be explored for diagnostic and therapeutic purposes. Whereas ureteroscopy, conventional imaging, and extracorporeal therapies are useful tools in many instances, there is a paucity of atraumatic and real-time navigation systems to aid in diagnostic and therapeutic procedures involving the ureters and renal pelvis. In its current status, the role of this technology as a mode for performing cystoscopy may not be necessary, because currently flexible cystoscopy permits relative ease of access for diagnostic and therapeutic purposes.
Examination of the ureter and pelvicaliceal system has technical and logistical demands, however. Even though conventional ureteroscopy has a complication risk that is purported to be less than 1% overall, some centers still report significant complication rates. 7 A similar analogy is likened to the platform used by the upper gastrointestinal physicians in which esophagastroscopy can be performed with relative ease, but mucosal endolumenal examination of the small bowel is difficult; hence, the use of image-rendering capsules for this purpose.
The introduction of a small navigable device into the ureter and navigation of the device along the lumen has potential applications. The potential exists for microcameras (diagnostic and surveillance purposes), ablation tools (for stone management, biopsy, and destruction of lesions), and drug delivery units to be attached to a navigable device. Before the application of the functional aspects can be envisaged, it is imperative that a robust and replicable unit is developed that can be steered reliably and precisely to a given endolumenal target site. Once such a unit is developed, the next steps would naturally be to use the device for functional diagnostic and therapeutic purposes in the porcine and, if successful, in the live human case. In future, such a device could be potentially introduced into the ureter via a flexible cystoscope.
A novel device using a flotation mechanism in a water-filled environment was developed and its navigation capability with magnetic-aided guidance tested. The device was specifically tested for propulsion and real-time control in the ex-vivo setting.
Materials and Methods
The overall test model comprised a magnetic guidance platform (Fig. 1) and a propulsion test platform (Fig. 2). The magnetic guidance platform comprised an axis of three equidistant and circumferentially placed paired rod-magnet units. The axes of rods were placed around a transparent cylindrical structure that housed the propulsion test platform. The magnets were placed is such a way that they could be guided to move along the rods placed in a horizontal axis. The complex of rods and magnets were such that they could impact on the propulsion test platform. The propulsion test platform comprised a roughly cylindrical endolumenal bionic worm (EBW) that was 3 mm in cross-sectional diameter and 5 mm in length. The EBW comprised a magnetic core such that it responded to the movement of magnets on the magnetic guidance platform.
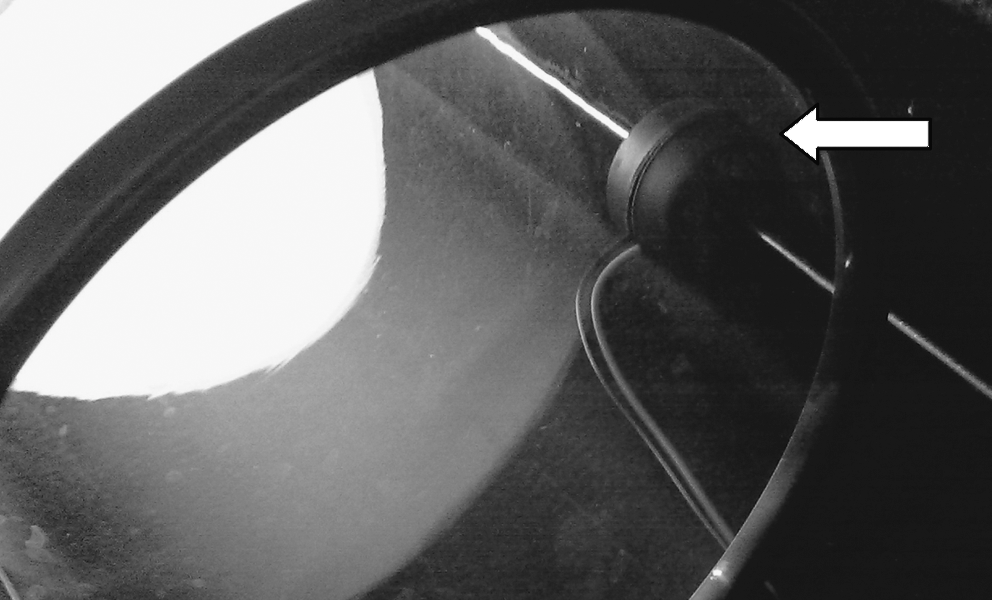
The magnetic guidance platform comprises an axis of three equidistant and circumferentially placed paired rod-magnet units. The arrow illustrates a rod-magnet unit around the cylindrical element.

The propulsion test platform comprises a roughly cylindrical Endolumenal Bionic Worm (EBW). One model of an EBW is seen (inset). The diagram illustrates a test run with a synthetic lumen. The arrow illustrates the red target mark to which the device was steered with magnetic aid.
Supermarket chicken intestine was used in this model because of its relative ease of acquisition for the purpose of this experimental study. The tissue has an intact lumen that is waterproof and resembles in several respects the human ureter. Porcine ureters could have been used, but in this preliminary study, the author chose the supermarket chicken intestine as the model. Animal rights issues in the United Kingdom make use of live porcine models difficult.
The net effect of the three paired rod-magnet units on the EBW was achievement of a precise navigation platform. The magnets permitted navigation with the aid of a computer program. To test navigation characteristics, the EBW was introduced into synthetic lumens (SL) and supermarket chicken lumenal structures. The latter involved the gastrointestinal lumenal tissue of supermarket chicken; ie, the ex-vivo equivalent of a ureteral substitute lumen (USL).
The natural peristaltic movement of the ureter potentially poses hindrance to endolumenal navigation. Endolumenal levitation was achieved in this model by using hydroflotation, thus obviating the need for levitation and tangent stabilization that necessitate complex computer-aided feedback control systems. The lumens were filled with water, and both ends were secured to prevent leakage. The EBW, when not in a magnetic field, simply sinks in the water-filled environment. When the magnetic field is deployed, however, the EBW centralizes in such a way that it is surrounded by water in all three planes so that it could be navigated in a way that a submarine immerses.
The rod-magnet complexes each lie 8 cms from the axis of the propulsion test platform circumferentially. Navigation capability was observed to weaken when the distance approached 12 cm. The navigation capability could potentially be preserved to function at rod-magnet distances greater than 12 cm by altering the intrinsic characteristics of the magnets used. This is an important factor to note when considering the potential application to the ureter in humans. The lumenal diameter of the SL tested was 4 mm and the mean diameter of the USL was on average 4.5 mm.
Navigation was graded by achievement of the EBW in propulsion to premarked sites, ability to remain static when necessary, and trauma to the USL. The premarked sites consisted of bright red paint placed in the form of a dot. The dot was 1.5 mm in diameter. It was observed by direct visualisation with the aid of a camera system attached to a monitor, but it could also be observed with the naked eye. The structures were observed under the microscope for breech after the exercises. Navigation was observed in 10 SLs and 10 USLs.
Results
The EBW was successfully steered using the magnetic guidance system with hydroflotation. The navigation system allowed premarked targets to be reached and permitted the device to remain static at these sites. For the SL element of the study, the EBW was navigated to within 1 mm of the target site in 100% instances. In the USL element of the study, however, the EBW was successfully navigated to the 1 mm premarked target in 92% of test runs and within 2 mm of the premarked target in 100% of test runs. The relative laxity of the USL tissue as compared with the plasticated and firm nature of the SL tissue was thought to account for this marginal discrepancy.
The ability of the EBW to remain static at a given site was tested for 5 minutes in each test run. There was uniform success with the EBW being able to remain static in suspension. There was no difference between the two mediums. At the end of all test runs, the lumens were incised longitudinally and independently observed by high-power microscopy for signs of microscopic injury. This observation of endolumenal surfaces failed to reveal evidence of trauma in either of the models.
Discussion
Gettman and Swain 8 reported their experience with experimental evaluation of wireless capsule endoscopes in the bladder in 2009. The capsule was deployed into the porcine bladder endoscopically. Real-time images were transmitted at a rate of four frames per second, and navigation was achieved within the bladder using external magnets. They concluded that cystoscopy using the capsule was feasible.
One of the major difficulties with image-rendering capsules, like the EBW used in the current study, is the ability to perform precise navigation to a target site. Having achieved locomotion to the target site, the next challenge is to maintain target site position. In the live human case, it is envisaged that the potential site of deploymen—ie, ureter and/or bladder—would pose difficulty because of the intrinsic movement of the ureteral and detrusor musculature. The shortcomings established by gastrointestinal capsular endoscopy include the slow gastric/intestinal motility, poorer quality of images compared with fiberoptic scopes, the position of the capsule cannot be accurately controlled, potentially obstructed views, interpretation of results are very observer dependent, and inability to perform a biopsy or treat any pathology seen. The urologic application of the concept would pose similar challenges.
Several platforms for transmission of images are being explored. One potential mode involves a novel transmission technology; ie, electric-field propagation that uses the human body as a conductive medium for data transmission. Bang and associates 9 studied the role of this in evaluating the small bowel in 45 patients and concluded that it was a safe and effective mode for exploring the entire small bowel, with good image quality and real-time feasibility.
On the issue of capsular navigation, Ciuti and colleagues 10 looked at the role of robotics compared with manual magnetic steering. An endoscopic capsule prototype that incorporated permanent magnets was deployed in an ex-vivo colon segment. An operator controlled the external driving magnet manually or with robotic assistance. The capsule was navigated via the colon, with planned visualization and deliberate contact of targets preinstalled on the colon wall. They found that in the ex-vivo setting, robot-assisted control was superior to manual control in terms of targets reached. Under in-vivo conditions, they found that the robotic approach confirmed higher precision of movement and better reliability compared with manual control. In this study using hydroflotation with magnet aid, the author found no difference between manual control and computer aid.
The ability to navigate the EBW to a given target site with precision and to remain static at a given site in a water-filled environment without causing microstructural trauma bears potential promise in application for diagnostic and therapeutic endourology. Further refinements could enable ureteral and/or bladder tissue biopsy, tumor ablation, and drug delivery, such as intravesical chemotherapy with or without a time-release mode. Such platforms as described in this study could allow endourology to be performed effectively in the least invasive manner possible. Similar models are currently being studied for bowel endoscopic visualization. Most recently, Siemens and Olympus Medical Systems Corporation are collaborating on developing technology for a magnetically guided capsule endoscope system.
Conclusion
Hydroflotation magnetic-aided endolumenal navigation of a microdevice was achieved endolumenally with targeted real-time control and with no observed trauma to the structures. The coupling of microrobotic tools to endoscopic capsules, such as the EBW in this study, could in the future pave the way for diagnostic and therapeutic ureteroscopy, including biopsy of ureteral and renal pelvis lesions, thus ushering in the platform for the next paradigm in endolumenal urologic procedures. Studies are currently under way for stone and tissue ablation and tissue biopsy via the EBW in the ex-vivo setting.
Footnotes
Disclosure Statement
At the time of conducting/completing the study, the author had no competing financial interests.