
Abstract
Introduction:
To evaluate forces exerted on a stone with different ureteroscopic irrigation systems.
Methods:
A 3 mm steel simulated stone was welded to a 3F stone basket and inserted into the working channel of a 4.5F Wolf semirigid ureteroscope. The basket shaft was attached to a 50 g load cell. The urterescope was placed in a ureteral model (14F silicon tubing). Simulated blood (McCormick™ Red Dye, 1 dye drop/15 mL H2O) was dripped adjacent to the stone at 12 drops/min. Endoirrigation devices were attached to the ureterscope and irrigation was applied at a rate sufficient to maintain visualization of the stone. Force on the stone was measured with the following endoirrigation systems: Boston Scientific™ Single-Action-Pump System (SAP) hand-pump and NuVista Medical™ Flo-Assist® foot-pump.
Results:
No significant difference (p=0.19) in the number of pumps required to maintain a clear endoscopic field was found between the SAP (0.20±0.075/second) and Flo-Assist device (0.25±0.056/second). The pump duration of the Flo-Assist was found to be less (1.12±0.40 seconds) than the SAP (1.35±0.31 seconds), but not significantly different (p=0.24). The average maximum impulse was significantly lower (p=0.0002) for the SAP (8.34×10−5 Ns) than the Flo-Assist (1.96×10−3 Ns). Total maximum impulse (2.02×10−5 Ns) for the SAP and total average impulse (5.51×10−6 Ns) were found to be lower than the Flo-Assist device. The Flo-Assist had a total maximum impulse of 4.49×10−4 Ns and total average impulse of 8.85×10−6 Ns, however, these differences were not statistically significant.
Conclusion:
The hand-pump (SAP) and foot-pump (Flo-Assist) irrigation devices tested require comparable amounts of pumps for similar durations of time to maintain endoscopic visualization. Overall, the SAP device exerts less average maximum force on the stone than the Flo-Assist device.
Introduction
Previous studies have compared passive gravity/pressure-dependent systems to active systems requiring hand or foot compressions, however, as new products become commercially available there is a continual need for independent evaluations of these devices. 1,3 The objective of this study was to evaluate a new foot-pump device, specifically focusing on irrigation parameters that may affect stone migration. By measuring the magnitude and duration of forces on a stone in a simulated model, our objective was to predict which system results in a higher probability of causing stone migration to improve the overall efficiency of endoscopic stone removal procedures.
Materials and Methods
A 3 mm steel simulated stone was welded to a 3F stone basket wire with the handle and sheath removed. The back-end of the stone basket wire was back-loaded into the working channel of a Richard Wolf™ 8701.534 semirigid ureteroscope (4.5/6F, 3F working channel). The back-end of the basket wire was then attached to a 50 g load cell (Sensotec, Columbus, OH; Model 31).
The ureteroscope was placed in a ureteral model (14F silicon tubing) directly in line with a stone positioned proximal to the scope tip (Fig. 1). Simulated blood (McCormick™ Red Dye, diluted 1:300, 1 dye drop/15 mL H2O) was dripped into the ureteral model adjacent to the stone through a 24-gauge needle at a rate of 12 drops or 0.6 mL/minute. Endoirrigation devices were attached to the ureteroscope and irrigation applied at a rate sufficient to maintain visualization of the stone by an experienced urologist. The irrigation bag was secured at a height 183 cm above the set-up. We evaluated the force exerted on the stone when controlled irrigation was performed with the following endoirrigation systems (Fig. 2):
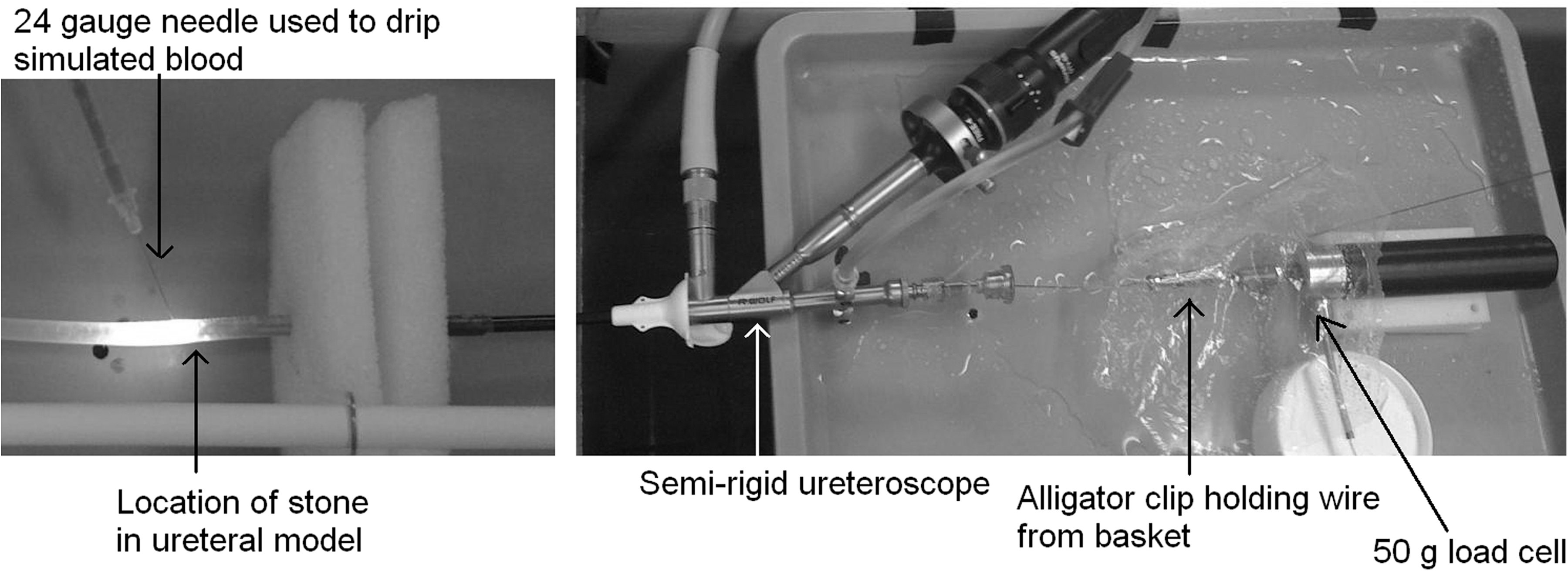
Experimental set-up.
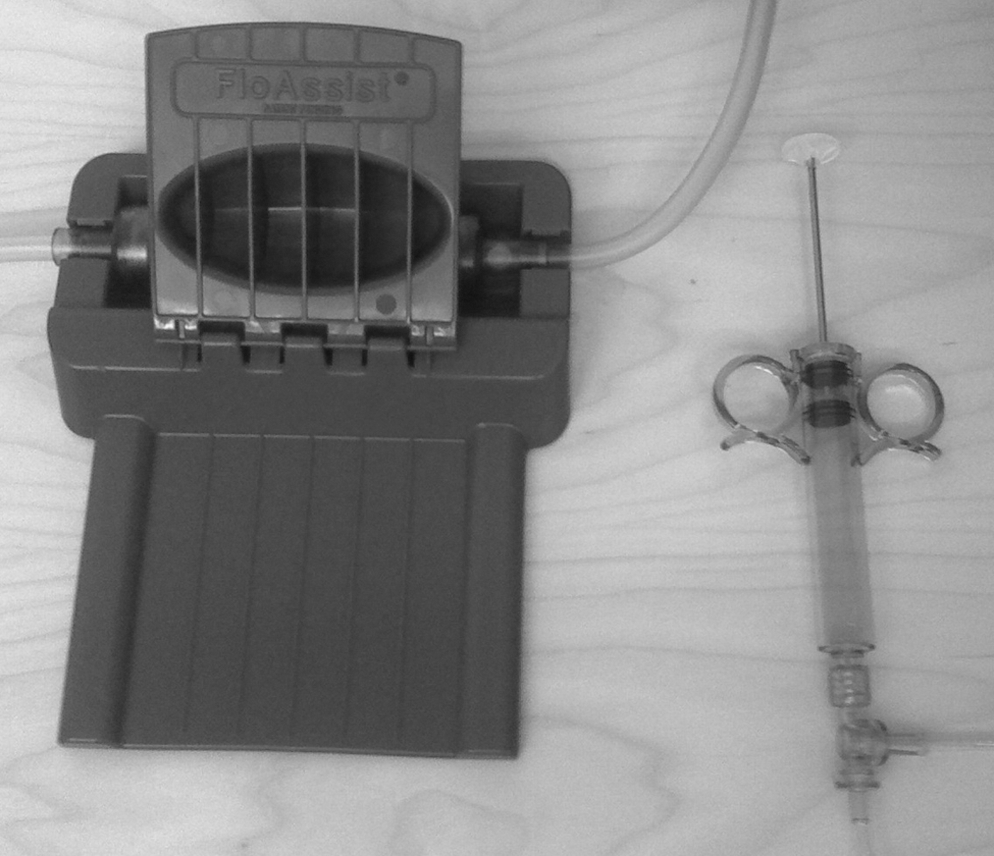
Irrigation devices: Flo-Assist (left) and single-action-pump (right).
1. Boston Scientific™ Single-Action-Pump System (SAP) hand-pump
2. NuVista Medical™ Flo-Assist® foot-pump
For practical comprehension of the effect of each irrigation device on the stone, calculations were conducted using the following formulas:
Time constitutes the duration of each pulse of irrigation by the respective irrigation systems. Force measurements were converted to impulses made up of positive and negative inflections based on the direction of the force experienced by the simulated stone within the model. Negative impulses reflect forces directed away from the ureteroscope, whereas positive impulses are associated with forces toward the ureteroscope and source of irrigation. Each system was evaluated for average number of pumps per second, average pump duration, average impulse per pump, average maximum impulse, total maximum impulse, and total average impulse. Statistical analysis included analysis of variance, paired t-tests, and Mann–Whitney where appropriate. A p-value of <0.05 was considered statistically significant.
Results
The Flo-Assist device required more pumps per second (0.25±0.06/second) than the SAP device (0.20±0.07/second) to maintain a clear endoscopic field but was not statistically significant (p=0.19). Average pump duration was less for the Flo-Assist (1.12±0.41 seconds) than the SAP (1.35±0.31 seconds) but not statistically significant (p=0.24). The average positive and negative maximum impulses were significantly lower (p=0.0002) for the SAP (8.34×10−5 and −9.5×10−5 Ns) than the Flo-Assist (1.96×10−3 and −1.3×10−3 Ns) irrigation system. Total maximum impulse (2.02×10−5 Ns) for the SAP and total average impulse (5.51×10−6 Ns) were found to be lower than the Flo-Assist device. The Flo-Assist had a total maximum impulse of 4.49×10−4 Ns and total average impulse of 8.85×10−6 Ns, however, these values were not significantly different from the SAP values. Figures 3 and 4 demonstrate the forces experienced by the simulated stone for the SAP and Flo-Assist, respectively.
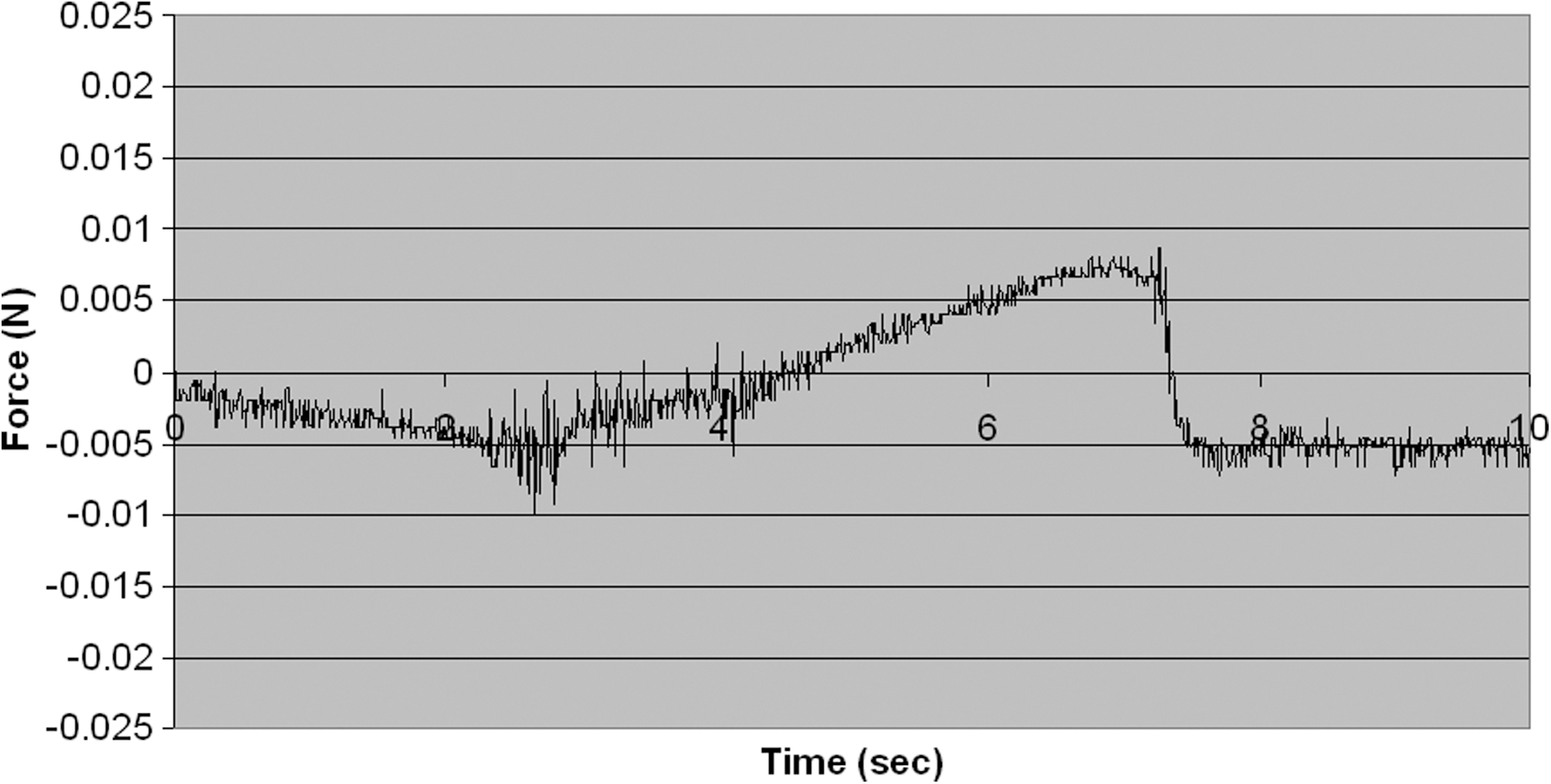
Force measurement for SAP device.
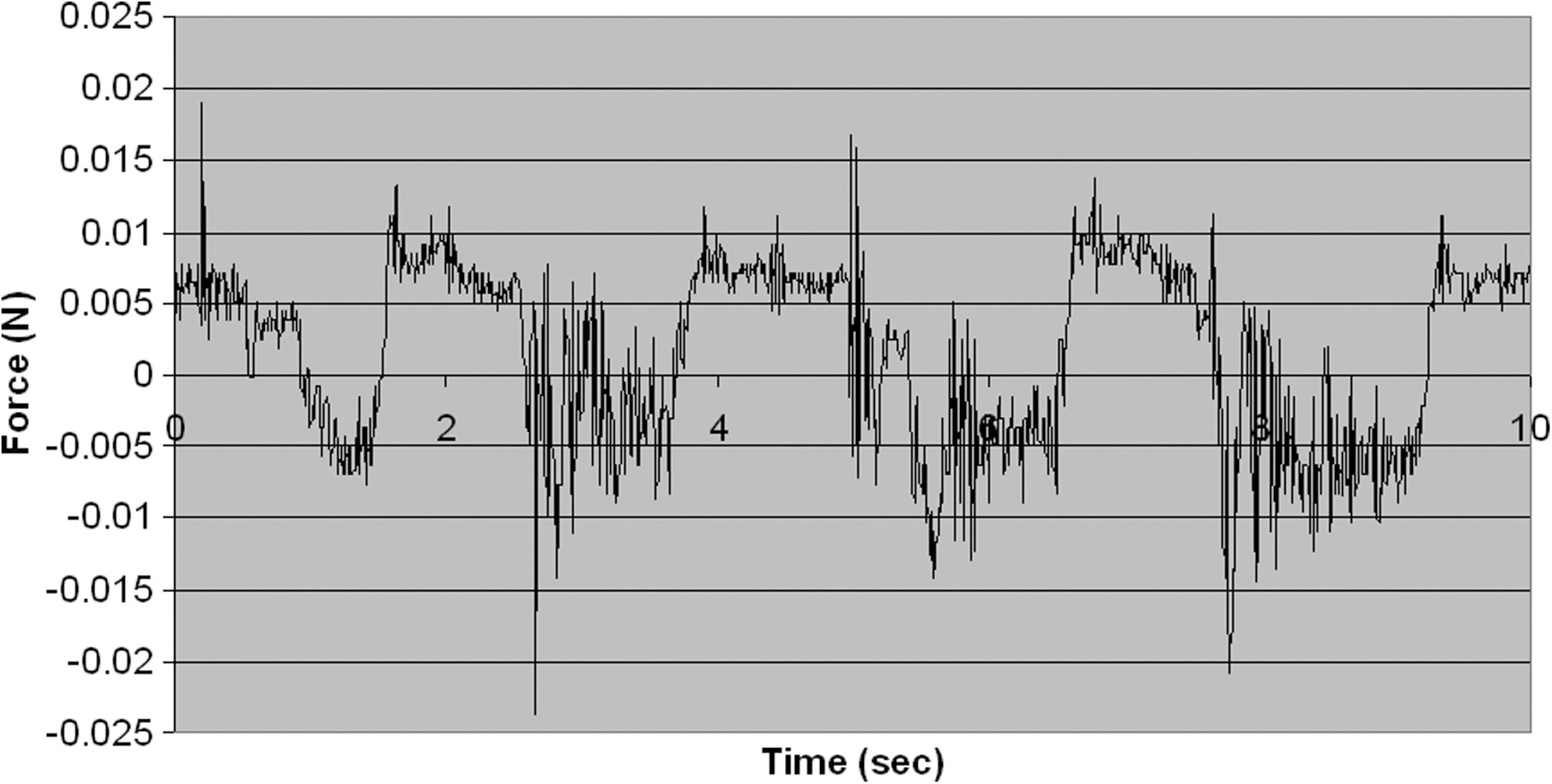
Force measurement for Flo-Assist device.
Discussion
This study was designed to characterize hand-pump and foot-pump irrigation systems with regard to the labor intensity required to maintain visualization, and the resultant forces on stones to predict the likelihood of stone migration. The ideal irrigation system will use minimal irrigation to maintain stone visualization without causing stone retropulsion. Based on calculations from force measurements, a comparative evaluation of the two systems was made.
Past studies have demonstrated that active hand- and foot-pump irrigation systems exert greater force on a stone than passive gravity and pressure based systems. 1 In this study, the average maximum impulse exerted on the stone by SAP hand system was found to be significantly less than the Flo-Assist foot system, suggesting a possible advantage for the SAP system in limiting retropulsion of ureteral stones and maintaining lower collecting system pressures. On the other hand, an average maximum impulse difference of two orders of magnitude suggest the foot-pump system may provide an enhanced ability to deliver a large bolus of irrigation to relocate stones to more accessible calices.
No significant difference in the total maximum impulse or total average impulse suggest similar flow characteristics between the two systems, however, the ergonomic differences between the two systems are clear. The Flo-Assist allows for hands-free operation by the surgeon, minimizing the need for additional assistance. However, use of the Flo-Assist while standing is a challenge, especially during lithotripsy procedures requiring the use of another foot pedal. Adding to this challenge, our results suggest the foot-pump system may involve slightly greater labor intensity, as indicated by the average number of pumps per second required to maintain visualization.
Our previous study evaluated a metal foot-pump (Peditrol©) and other hand-held devices, including the ACMI Irri-Flo. In comparison, the Flo-Assist (0.25 pump/second) is more efficient than the previous foot pedal (0.88 pump/second) and hand-held (0.40 pump/second) devices with respect to labor intensity. Our previous study also indicated the average maximum impulse was comparable for the SAP and Peditrol foot-pump that suggests the Flo-Assist foot-pump exerts impulses of a magnitude greater than previously seen.
An understanding of the forces that cause stone migration is also crucial for improving the primary goal of irrigation–to effectively maintain visualization. In a recent pilot study of an automated irrigation/suction system, the use of a constant irrigation pressure and suction flow rate demonstrated a reduction in operative time (32% with rigid scope, 53% with flexible scope) and increased stone-free rate (92% v 69%) when compared with pressure based systems. 5 The reduction in operative time was mainly attributed to improved visibility and working space, as a result of consistent dilatation of the ureter. The precise control of irrigation pressure and outflow with the automated system that allowed for consistent dilatation of the ureter also demonstrated a reduction in failure rate because of stone migration up to the renal cavities. 5 Based on such findings, further investigation of the ability for active (hand- and foot-pump) irrigation systems to operate with similar pressure and outflow characteristics to automated systems may reveal useful information for reducing the likelihood of stone migration while also optimizing visualization.
Conclusion
Our study data suggests the SAP hand-pump irrigation system provides an advantage over the Flo-Assist foot-pump system with regard to preventing retropulsion of ureteral stones, and may serve to increase the efficiency of ureteroscopic stone removal procedures. Active hand- and foot-pump systems provide sufficient control of irrigation flow and require similar amounts of labor intensity to effectively maintain endoscopic visualization. In addition, the ergonomic preference of the operator must be considered when determining the most effective irrigation system for the procedure at hand.
Footnotes
Disclosure Statement
Dr. Manoj Monga is a consultant for Bard Medical, Boston Scientific, Cook Medical, and Gyrus ACMI.