
Abstract
Objective:
To assess the significance of a surgeon's experience on the mechanical forces applied to tissues through laparoscopic instruments.
Materials and Methods:
A total of 34 participants were enrolled into the study (8 experts, 10 intermediates, and 16 novices). Laparoscopic graspers with a sensing module to detect load were used by participants to carry out six ex vivo tasks: to grasp a porcine ureter in three positions either 1, 5, or 10 times, in turn, with both dominant and nondominant hands. The data were logged and recorded by a custom data acquisition software to calculate the peak force (Fmax) and mean force (Frms).
Results:
Significant correlation was observed between Fmax and Frms (Pearson correlation, r = 0.97, p < 0.0005). No statistical significant difference was observed when comparing the effect of the three different tasks on peak force (F(2,1084) = 0.28, p = 0.753). There was a statistically significant difference in mechanical forces applied with those more experienced applying consistently lower mechanical forces (F(2,1084) = 21.36, p < 0.0005). In individual training groups, the effect of dominant hand was significant in the novice (significantly lower, F(1,510) = 6.70, p = 0.010) and consultants (significantly higher, F(1,250) = 9.601, p < 0.020) with the intermediate group showing no significant difference between the hands.
Conclusion:
Outcomes have suggested a relationship between the training level of the surgeon and the forces imparted on the tissue. This demonstrates a need for further training in surgeons until a consistent low force can be applied to tissues. Whether such measures could be used as an indicator of surgeon proficiency is unclear; however, it has the potential to be used to determine whether more training is needed for surgeons.
Introduction
T
During open operative procedures, the surgeon receives direct haptic feedback when manipulating tissues and is, therefore, able to regulate the amount of exerted forces, so that they are sufficient to prevent tissue slipping out of the instrument, yet not excessive to prevent tissue damage. Moreover, direct vision and three-dimensional (3D) visual cues are available; hand–eye coordination is, therefore, preserved. With the advent of MIS, long rigid instruments have been introduced between the surgeon's hands and the tissue, and, therefore, the direct feedback of mechanical forces is lost. The current instrumentation obstructs the perception of forces, velocities, and displacements of the tissues and the proprioception required for motor performance is distorted. 3 With direct haptic feedback, the trainee is able to perform laparoscopic tasks more consistently. 4 This is likely to be a result of better differentiation of tissue types with the use of direct vision as well as tactile feedback. 5
The steep learning curve required to overcome these obstacles posed by MIS has long been recognized as a potential hurdle for trainee surgeons especially given the static training models currently in place. Although virtual reality simulation has the potential to offer important advantages in the area of training for new skills and procedures, evidence on the transfer of skills from the simulated environment to the operating theater is still limited, especially in advanced surgical procedures. 6 The direct feedback from tissue handling is diminished in MIS and, therefore, the discrepancy between “safe” and potentially “traumatic” mechanical forces applied to tissues is far more discrete as compared with traditional approaches in surgery. Given that most virtual reality simulators used for training currently lack realistic haptic feedback, 7 trainees find it difficult to safely differentiate between varying forces applied to tissues.
In this study, we look to compare mechanical forces applied to ex vivo porcine tissue through laparoscopic instruments by novice, junior, and expert surgeons to assess whether those with more experience handle tissue with a reduced, consistent level of mechanical force. If so, this would highlight the need to reinforce the importance of mechanical forces applied to tissues at an early stage of training to ensure safe handling and minimal trauma.
Materials and Methods
Thirty-four participants with different levels of experience in laparoscopy participated in the experiment. In the United Kingdom, once a student graduates from medical school, a further 2 years of foundation training is carried out to acquire the general competencies to work as a junior hospital doctor. This will involve working on wards with nurses and allied health professionals and delivering day to day medical care to in- and outpatients. Having completed the required foundation in the practice of hospital medicine, the next stage involves 2 years of core training either in surgery or in medicine. Core surgical training lasts 2 years and provides training in a hospital in a range of surgical specialties, and trainees are expected to take the examination to achieve membership of the Royal College of Surgeons or equivalent. For surgical specialty training, core trainees are invited to apply for the specialty training post through a national selection process. If successful, trainees are allocated a national training program number and join a regional “rotation” as a specialty trainee (ST3—designating the fact that is the 3rd year of a 7-year formative training program and finish as ST7. STs are often called registrars [resident]). The participants were divided into three groups (novices, intermediates, and experts) defined by their position in the medical training pathway. Novices included junior doctors who had been qualified for 1 to 2 years and had completed at least 4 months training in surgery, intermediates as surgeons who were in surgical specialty training, and experts were defined as surgeons who had completed their training (UK: consultants and USA: attending). This did not correlate directly with specific training on MIS skills, yet was a good indication. The study was approved by the local research committee.
Instrumented graspers
The laparoscopic graspers used in the experiment were curved dissectors (surgical innovations), modified to provide sensing of both grasping force and grasper face angle. This sensing module was positioned between the handle of the instrument and the shaft leading to the grasper faces (Fig. 1).
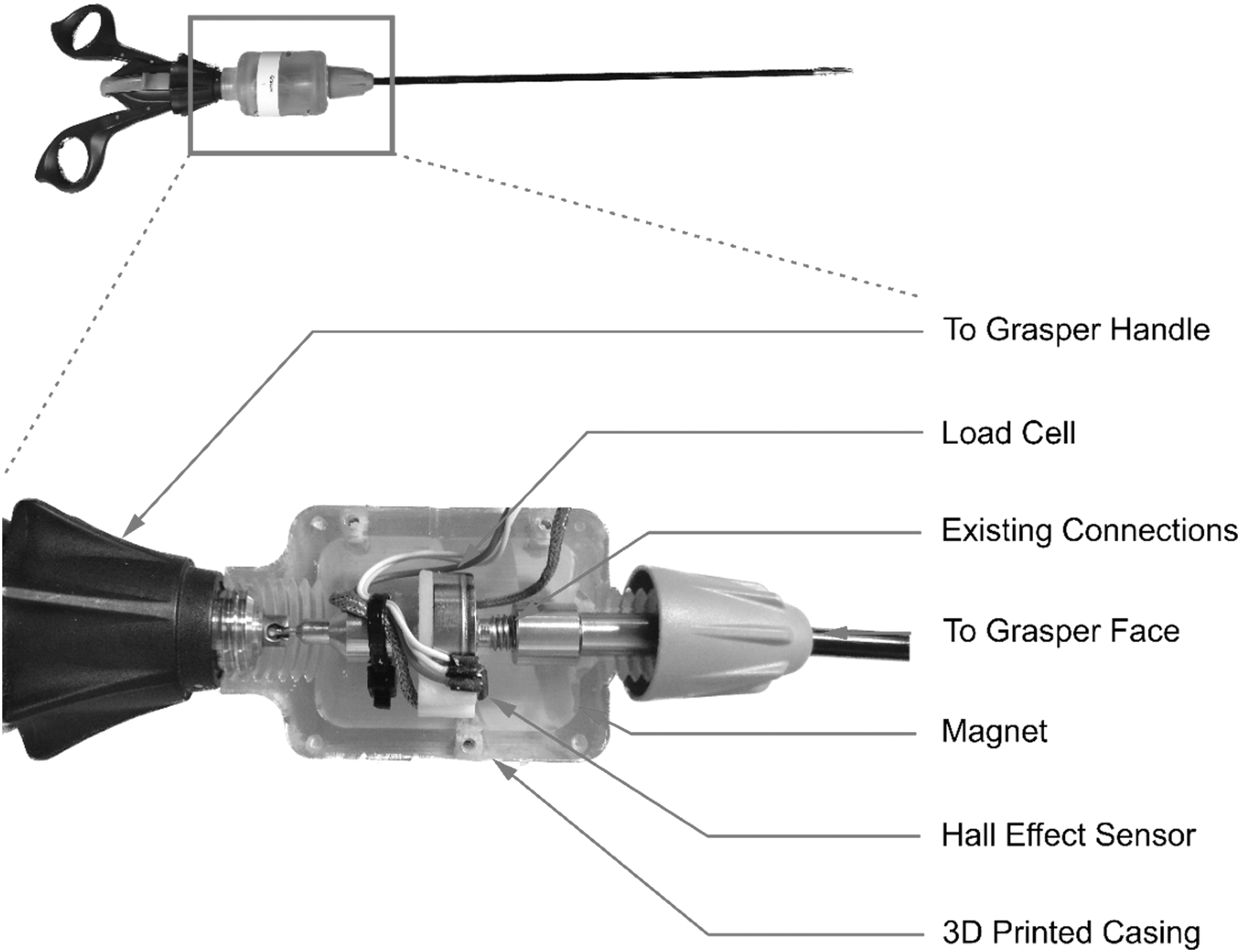
A photo indicating the structure of the instrumentation module of the graspers. 3D = three-dimensional.
It contained a 200N load cell (LCM201-200N; Omega) and was positioned between the existing mechanism to measure the grasp forces and a Hall effect sensor coupled to a moving magnet to measure the movement of the linkage, thereby measuring the grasper face angle. The sensors were calibrated across a range of values and achieved resolutions of 0.005 N and 0.1° respectively. The instrumentation was housed in a custom casing fabricated by 3D printing. The full instrumentation module weighed 90 g. The data were logged and recorded by a custom data acquisition software at 100 Hz (Labview).
Experimental protocol
The instrumented graspers were used to analyze grasping forces in a simulated surgical environment. A portable laparoscopic box trainer (Eosim) was used in conjunction with a webcam (C920 HD Pro; Logitech) to replicate the visual environment of MIS (Fig. 2). Porcine ureter samples were divided into ∼50 mm sections, and spatulated from the distal end. The samples were then affixed within the simulated environment. Participants were then asked to grasp the sample in three positions with each hand, both dominant and nondominant. Each position was designated to a task, specifically grasping a total of 1, 5, or 10 times. Before the measurements were started, an overview was provided to the novices to explain how to perform the task.

The test setup in use, showing the simulated environment and positioning of the participants.
The grasp forces and grasper face angle were recorded, with a video of each task also saved. Grasps were identified by analyzing the force and position data, selecting peaks which surpassed both force and position thresholds. For each grasp, the peak force (Fmax) and mean force (Frms) were calculated, illustrated in Figure 3, using typical data for a grasping task. To eliminate bias of differing dominant hands, an Edinburgh Handedness Survey was completed by each participant.
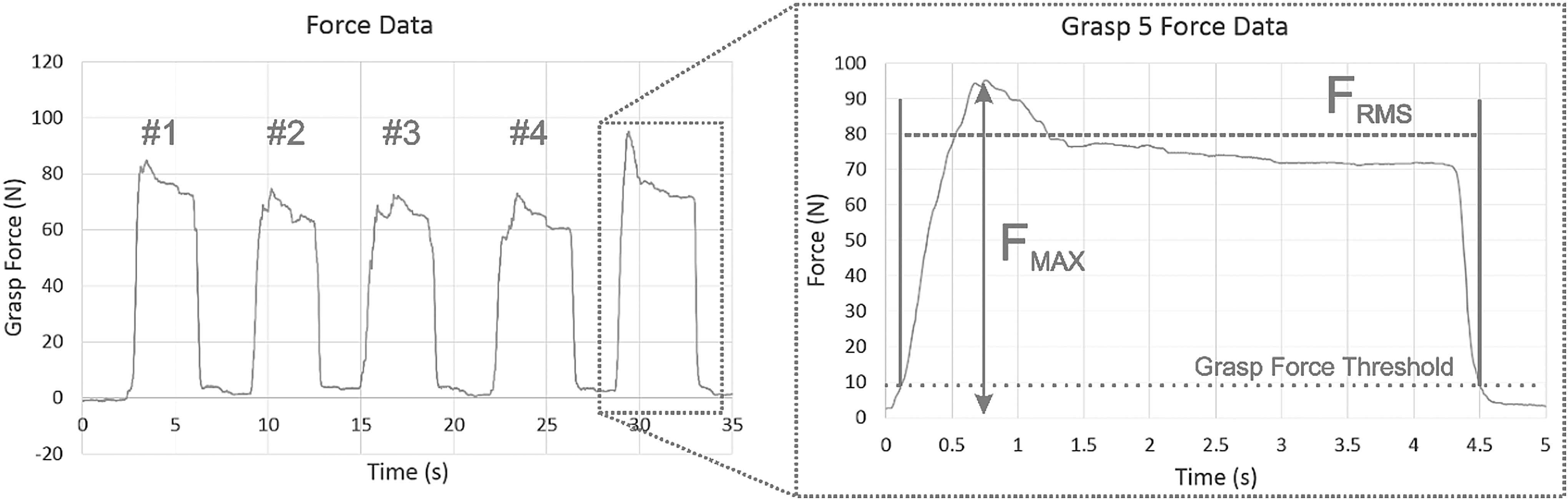
An example of typical grasping data. Fmax indicates the peak force whereas the Frms indicates mean force.
Results
The grasping study consisted of 34 participants, of whom 8 experts, 10 intermediates, and 16 novices completed a total of 32 grasps over the 6 tasks. Significant correlation was observed between Fmax and Frms (Pearson correlation, r = 0.97, p < 0.0005). Owing to this, the reported results shown in Figure 3 only focus on Fmax. Figure 4 shows a summary of grasps across tasks for the three skill levels. The associated grasp metric Fmax is given in Table 1. A one-way analysis of variance (ANOVA) was conducted to compare the effect of the three different tasks on peak force, yielding no significant differences (F(2,1084) = 0.28, p = 0.753).
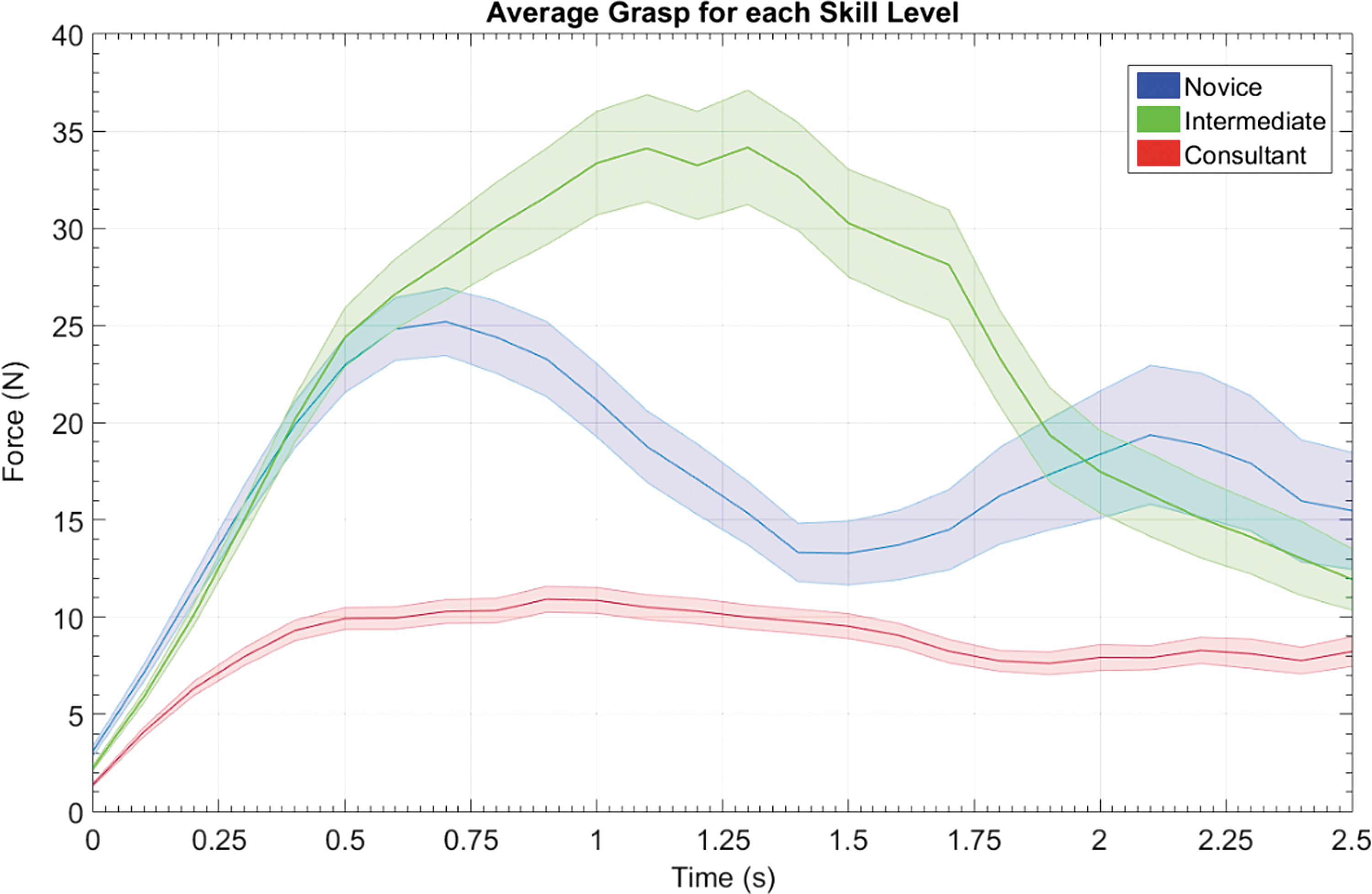
The average grasp for each skill level (±standard error of the mean).
Fmax = peak force; SEM = standard error of the mean.
A two-way ANOVA was conducted to compare the effect of surgeon's experience on the peak grasp forces. This showed that there was a statistically significant difference with those more experienced applying consistently lower mechanical forces (F(2,1084) = 21.36, p < 0.0005). A similar test was conducted to assess the relationship between experience and handedness (Fig. 5); however, this did not show a statistically significant interaction between dominant and nondominant hands (F(1,1084) = 0.06, p = 0.806). The interaction effect (training X hand) was significant (F(2,1084) = 5.66, p = 0.004); therefore, assessment of handedness in individual groups was performed.

Mean Fmax ± 95% confidence interval for all tasks against training level.
In individual training groups, the effect of dominant hand is significant in the novices (significantly lower, F(1,510) = 6.70, p = 0.010) and consultants (significantly higher, F(1,250) = 9.601, p < 0.020). The intermediate group showed no significant difference between the hands (Fig. 4).
Discussion
The advent of endoscopic, laparoscopic, robotic, and image-guided percutaneous techniques to manage patients is only the beginning of an ever-expanding array of minimally invasive modalities available. Such modalities have reduced haptic feedback as compared with conventional open techniques 8,9 and, therefore, the demands placed upon surgeons in training to be able to differentiate between the subtleties of safe and excessive mechanical forces are significantly greater. There is evidence to suggest that experience is the most important factor in allowing the surgeon to develop a safer sense of mechanical forces applied to tissues. 10 This evidence was echoed by the results obtained from our study, wherein we have shown that there are significant discrepancies in the mechanical forces applied to tissue between novice/intermediate trainees as compared with experts. Horeman et al. 11 also observed similar findings. Whereas the novice/intermediate groups were applying significantly higher forces onto tissue with increased variability over grasp time, the expert group showed a far greater level of force consistency with significantly reduced levels of forces applied as shown in Figure 4.
In vivo, there is a direct, graded response between forces applied and tissue damage, with liver and small bowel being most susceptible and ureter most robust. 12 In addition, certain laparoscopic complications can be attributed directly to tissue handling. One study analyzing the errors during laparoscopic cholecystectomies showed that graspers were the most frequently involved instrument in erroneous task performance: 70 out of 189 errors (37%) in 20 procedures. Importantly, 14 out of the 70 grasping errors (20%) were because of excessive forces and all of them required corrective action. 13 In a further study investigating erroneous task performance during 977 laparoscopic operations performed by 20 surgeons, graspers came third in frequency of causing complications (53%), after coagulators and dissectors. Because of the delicate arterial supply of the ureter, it is important to handle the ureter with minimal force. Clearly, the threshold of safe mechanical pressure that one can apply is dependent on the type of tissue surface; therefore, further work is required to first identify these thresholds and second to incorporate a feedback mechanism to alert the operating surgeon.
As such systems are currently not in place, surgeons find the ability to differentiate between safe and dangerous levels of tissue handling in laparoscopic surgery challenging. It is felt by some that there is currently an insufficient training model in place for surgical trainees to develop this skill. 14 In years gone by, trainees were able to learn and develop open surgery in the operating theater; however, the complexities of MIS are such that these conventional training methods cannot be replicated. Many have looked to simulation to fill this void in surgery and this has been an area that has grown in recent times. 15 Several training models have been proposed with the virtual reality simulators being popular in surgical training. 16 These can provide basic skills training in a controlled environment free of pressure of the operation on patients. They can also offer objective performance assessment without the need for monitored human supervision and directly measure multiple aspects of a subject's psychomotor performance on specific laparoscopic skills. The major flaw with current virtual reality simulators, however, is that the majority lack the feel of realistic haptic feedback. 17 As discussed earlier, this is crucial in allowing trainees to develop an understanding of safe grasping forces and is, therefore, an area that is deficient in current training models. There clearly needs to be improvement within this area of training if future MIS surgeons are to perform safer procedures with fewer complications.
Analysis of the forces acquired with the instrumented grasping system has given us a quantitative insight into the mechanics of surgical grasping. Specifically, it has suggested a relationship between the training level of the surgeon and the forces imparted on the tissue. This demonstrates a need for further training in surgeons until a consistent low force can be applied to tissues. Whether such measures could be used as an indicator of surgeon proficiency is unclear; however, it has the potential to be used to determine whether more training is needed for surgeons. Future work would characterize the tissues commonly involved in MIS to find the safe levels of force that can be applied.
Footnotes
Acknowledgment
The authors acknowledge the staff at LIMIT Suite, St James's University Hospital, Leeds, United Kingdom.
Author Disclosure Statement
No competing financial interests exist.