
Abstract
Abstract
This article presents a soft handling system inspired by the principle of the natural wave (named Wave-Handling system) aiming to offer a soft solution to delicately transport and sort fragile items such as fruits, vegetables, biological tissues in food, and biological industries. The system consists of an array of hydrostatically coupled dielectric elastomer actuators (HCDEAs). Due to the electrostriction property of dielectric elastomers, the handling system can be controlled by electric voltage rather than the cumbersome pneumatic system. To study the working performance of the Wave-Handling system and how the performance can be improved, the basic properties of HCDEA are investigated through experiments. We find that the HCDEA exhibits some delay and hysteretic characteristics when activated by periodic voltage and the characteristics are influenced by the frequency and external force also. All this will affect the performance of the Wave-Handling system. However, the electric control, simple structure, light weight, and low cost of the soft handling system show great potential to move from laboratory to practical application. As a proof of design concept, a simply made prototype of the handling system is controlled to generate a parallel moving wave to manipulate a ball. Based on the experimental results, the improvements and future work are discussed and we believe this work will provide inspiration for soft robotic engineering.
Introduction
R
One of the important applications of the soft machines or structures is manipulating objects, including grabbing, transportation, sorting, and so on. When some delicate and fragile items such as fruits, vegetables, and biological tissues are to be transported or sorted in food and biological industries, the existing solutions with rigid surface will not be preferred due to destructive interactions with the items. 6 Thus, researchers have proposed many pneumatic solutions. A pneumatic platform with a soft surface is developed for transporting and sorting delicate items by Festo Company. The structure of the individual module is complex and elaborate because of the need to control pneumatic channel and valves. Likewise, a pneumatic peristaltic soft robot and a table containing an array of expandable soft chambers based on the pneumatic system have been proposed in literatures.7,8 The robot can transport objects using the peristaltic principle and the soft expandable chamber table can roll a ball from one position to a specified position by the controlling of a pneumatic manifold. Besides, a conceptualized soft peristaltic sorting table was given to study the probabilistic automation to find the optimal control sequence and the respective algorithm by Stommel and Xu. 9 However, the presence of pneumatic actuators will inevitably comprise pneumatic circuit, pumps, valves, and pneumatic control systems, which make the system become more cumbersome and expensive. Meanwhile, the pneumatically powered soft machines require complex design and fabrication processes and the power sources are generally big and bulky. 1
In recent years, a new type of soft material called dielectric elastomer (DE) has been intensively studied and widely used in various areas, including soft robots, biological devices, energy harvesters, and medical instruments,10–13 due to their high energy density, high energy efficiency, light weight, scalability, and low noise features. 14 One typical kind of dielectric elastomer actuator (DEA) is the hydrostatically coupled dielectric elastomer actuator (HCDEA), which consists of two membranes of a DE clamped with rigid circular rings.15–17 When a voltage is applied on the electrodes between one of the membranes, the other membrane produces a push–pull action due to hydrostatic coupling. These research progresses make it possible to design an electric soft handling system, avoiding the deficiency of the pneumatic system.
In this article, a novel, soft handling system based on HCDEAs has been developed to transport or sort delicate and fragile items using the principle of nature wave (named Wave-Handling system). The design and fabrication processes of the soft HCDEA unit and the handling system are presented. Moreover, we conduct experiments on the HCDEA unit to find the basic properties affecting the performance of the handling system. As a proof of concept, we fabricate a prototype of the Wave-Handling system. Then, we design a simple control circuit to control the system to generate a parallel moving wave to manipulate a ball. Finally, we discuss the drawbacks, improvements, and control of the proposed handling system and analyze the advantages of the proposed design compared with the pneumatic system. We believe that the soft Wave-Handling system will provide a new solution for manipulating and inspiration for soft robotic engineering.
Materials and Methods
Design and fabrication of the HCDEA unit
The essential characteristic of the HCDEA is an actuator that couples the movements of the two membranes through a fixed volume of fluid. In this study, we choose a spherical structure that consists of two DE membranes (one as active membrane, the other as passive) and a fixed volume of air, as shown in Figure 1. When a voltage is applied on the active membrane between the electrodes, there will be charges accumulating on both sides of the membrane as a result of its insulation. The opposite charges on the two electrodes are attracted to each other, thus generating an electrostatic Maxwell pressure
18
where
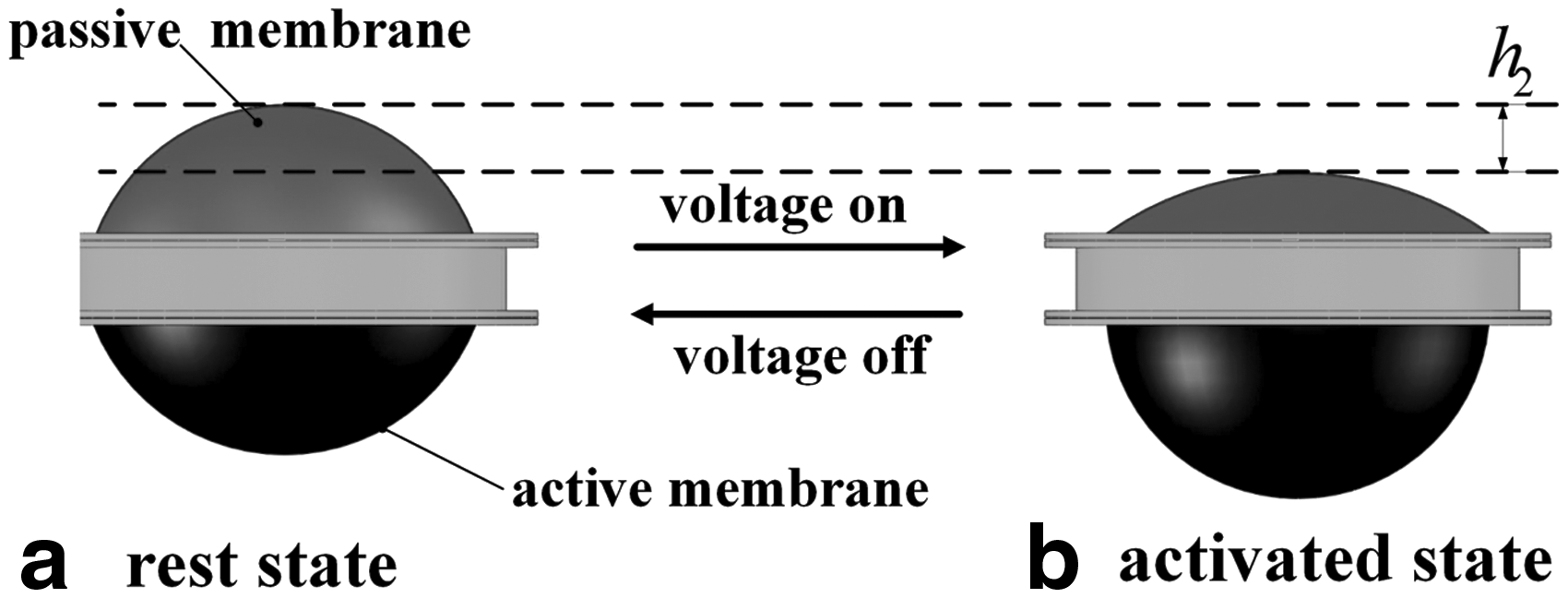
Working principle of the HCDEA unit.
An electrically induced actuation of the active part exerts a smaller force than the passive membrane onto the fluid inside the actuator. The force is hydrostatically transmitted to the passive part. Accordingly, the fluid is used to internally transfer the actuating action from the active part to the load without any direct contact between them. Thus, the passive membrane will contract and exert a pull actuation, whereas when the voltage is off, the passive membrane will extend and exert a push actuation. Thus, a stroke controlled by the voltage can be obtained.
The HCDEA unit here was fabricated according to a multistep procedure summarized in Figure 2 and described below. We choose the commercially available VHB4910 (3 M Co.) as the DE membrane since it exhibits large deformation. First, two pieces of circular VHB membrane with the same diameter are both uniformly prestretched with extension of four times and then clamped by rigid plastic frames, as shown in Figure 2a–c. Then, the electrode material is brushed onto the two sides of one of the DE membranes. The membrane with electrodes functions as the active part of the actuator and the other membrane without electrodes functions as the passive part (Fig. 2c). Then, the two membranes and a cylindrical structure constitute a sealed volume, which are bounded by the surfaces of the active and passive parts as well as the inner wall of the cylindrical structure. A one-way valve is connected to the cylindrical structure, as shown in Figure 2d, by which we can alter the initial hydrostatic pressure in the sealed volume. Finally, when the air was filled in the volume with some proper hydrostatic pressure, the HCDEA unit was built (Fig. 2d).

Fabrication process of the HCDEA unit.
Design and fabrication of the Wave-Handling system
The goal of this article is to design a handling system with a soft surface to transport or sort delicate and fragile items using the principle of nature wave. As mentioned in the Design and fabrication of the HCDEA unit section, the passive part membrane of the actuator is capable of exhibiting different push–pull strokes with different voltages applied to electrodes on the active part membrane of the actuator. Therefore, we can obtain a variety of moving wave shapes on the surface of the sorting table by regulating the value and timing of the voltage applied on the electrodes of each HCDEA unit. For example, as shown in Figure 3, the circle with red background stands for the actuator with voltage on, and the circle with black background stands for the actuator with voltage off. So, some typical waveforms of the soft surface can be generated through different actuation patterns. When the waveform varies periodically according to some certain control rules, the moving wave will be generated and the objects will be manipulated. This is similar to the principle of the nature wave where the water molecules within a wave move up and down in a circular motion, but remain in roughly the same place. Yet, the wave rolls over the surface of the sea and then transports the objects on its surface. 6

Several basic actuation patterns of the Wave-Handling system. Color images available online at www.liebertpub.com/soro
The Wave-Handling system was fabricated in the form of an array of HCDEA units, which were arranged on a horizontal holder. Then, a piece of elastic film made of a kind of silicone rubber (Wacker Chemie silicone rubber M4601) is attached to the apex of each passive membrane and works as the soft surface, as shown in Figure 4.

Prototype concept of the Wave-Handling system.
Finally, a Wave-Handling system with soft surface consisting of the HCDEAs (4 × 4) as the actuation component and the elastic film as the stuff carrier component is constructed. The principles of modularity and expandability guarantee high system flexibility.
Experiments
The Wave-Handling system handles objects by making moving wave shapes on the surface. The moving waves, generated continuously by changing the phase, amplitude, and direction of the actuation pattern over time, are able to move objects in a targeted manner. Each HCDEA unit can be controlled by the voltage independently to obtain diverse wave shapes to manipulate the objects in as many ways as possible. Therefore, the performance of the handling system is primarily determined by basic properties of the HCDEA unit. Thus, it is necessary to conduct experiments on the actuation unit to find the significant properties that directly affect the performance of the Wave-Handling system.
Experiments on the HCDEA unit
First, consider the working principle and material properties of the actuation unit, the amplitude of the resulting moving wave is affected by several main factors, including the initial hydrostatic pressure, pi, the force exerted by the sorted objects, F, the applied voltage, Φ, and the geometric dimensions, as shown in Figure 5. For a given HCDEA unit, the changes of the three quantities have important influences on the transportation and sorting of objects, in that they directly affect the waveform and wave velocity of the resulting wave. Therefore, examination of the relationship of these quantities will provide some significant idea for the fabrication and control of the sorting table.

Displacement variation of the apex of the passive spherical membrane in working conditions (section view).
In the experiments, a laser displacement sensor (KEYNCY LK-H500) is employed to measure the apex displacement of the DEA unit caused by the initial hydrostatic pressure, force, and voltage. The weights are employed to exert force on the DEA unit to mimic the situation when an object is on a DEA unit. Carbon grease (MG Chemical) is employed as the electrodes. A waveform generator (Agilent 33500B) is used to produce the input signal, and a voltage amplifier (TREK 610E) is used to amplify the input signal to apply voltage on the active membrane. A data acquisition card (NI USB-6363) combined with a computer is used to collect the experimental data. The experimental setup is shown in Figure 6.

Experimental setup for the actuation unit.
The specimen of the HCDEA unit is fabricated following the method shown in the Design and fabrication of the HCDEA unit section with two layers of DE membranes for both passive and active membranes. All the membranes are prestretched for four times. The size of the DEA unit is shown in Figure 7.
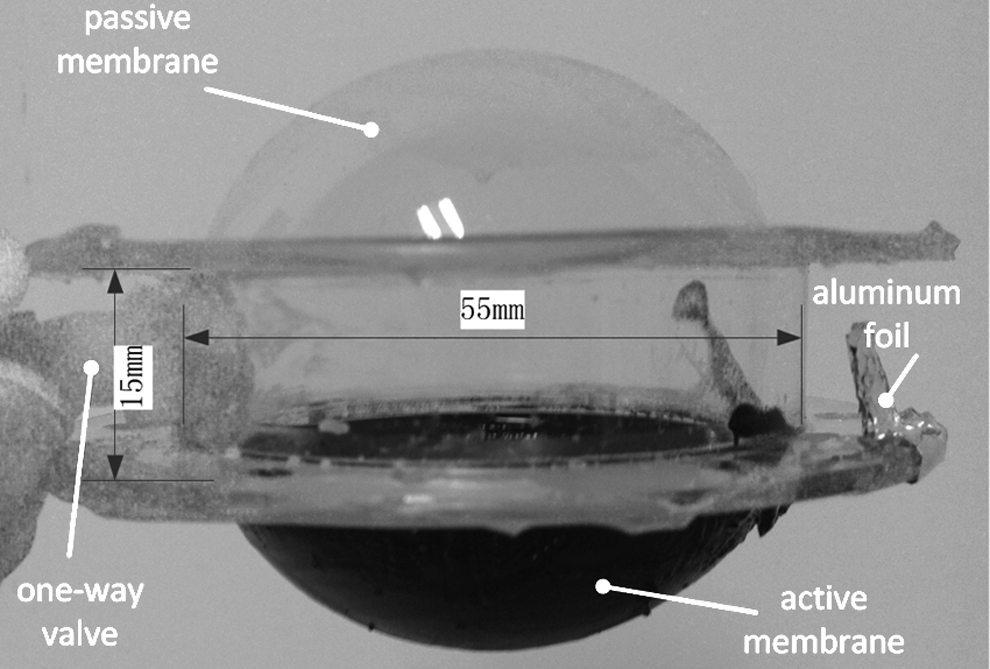
Prototype of the actuation unit (HCDEA unit).
The experimental data shown in Figure 8 suggest that the apical height of the HCDEA unit can be adjusted by the initial hydrostatic pressure. The amplitude of the resulting moving wave is part of the apical height, so a proper size of the apical height can lead to a proper amplitude of the resulting wave. Some particular factors affecting the value of the initial apical height will be discussed in the Results and Discussion section. In practical applications, the choice of the initial hydrostatic pressure may need to consider the weight and size of the sorted objects. Figure 9 shows the influence of the force exerted by the object on the value of apical height with three different initial hydrostatic pressures. The change of the apical height reduces the controllable range of the amplitude of the resulting wave because the external force is determined by the objects transported or sorted by the system, that is, it is fixed. The way to control the handling system during working process is to combine the control of the parameters of voltage, including the waveform, amplitude, and the frequency, and the control of the actuation pattern.

Apical height, h, versus the initial hydrostatic pressure, pi.

Displacement, h1, versus the force, F, with three different initial hydrostatic pressures. Color images available online at www.liebertpub.com/soro
Figures 10 and 11 show some important features of the HCDEA unit, which may have great effects on the performance of the handling system. The experimental data in both figures reveal the hysteresis characteristics of the HCDEA unit during the voltage loading and unloading procedures. A triangle wave voltage is used to examine the property. Figure 10 shows the hysteresis characteristics with three different forces exerted on the passive membrane. A larger value of the force leads to a lower value of the maximum displacement under the same control voltage with the same frequency of 0.25 Hz. Therefore, when the weight of transported or sorted objects is larger, it means lower amplitude of the resulting wave and maybe lower efficiency. Figure 11 shows the hysteresis characteristics of the HCDEA unit with three different frequencies of the triangle wave voltage without an external force. The frequency of the control voltage has obvious effect on the hysteresis characteristics during the working process of the actuation unit. The value of the maximum displacement reduces as the frequency of the control voltage increases. The hysteresis is caused by intrinsic nonlinearity and viscoelasticity of the specific DE material used in the experiment, that is, VHB. The significant impact of hysteresis on the peristaltic sorting table makes the precise control of the system very difficult because the same value of voltage during loading and unloading processes does not correspond to the same value of displacement, h2, as shown in Figure 10. What is more, there is a time delay during the rapid change of control voltage. Figure 12 shows the change of displacement of the apical height during a step voltage. When the frequency of the control voltage increases, there will not be enough time for the apical displacement to recover. This may reduce the amplitude of the resulting wave and efficiency of the system.

Displacement, h2, versus the voltage, Φ, with three constant forces. Color images available online at www.liebertpub.com/soro

Displacement, h2, versus the voltage, Φ, with three constant frequencies of input voltages. Color images available online at www.liebertpub.com/soro

Experimental data of the apical displacement of the passive membrane and the voltage on the active membrane. Color images available online at www.liebertpub.com/soro
Experiments on the Wave-Handling system
A prototype of the soft Wave-Handling system was developed to provide a proof of concept of the design described in the Design and fabrication of the Wave-Handling system section. In particular, the prototype was exploited to verify the simply made HCDEA unit and the system. Based on the gathered experimental results on the actuation unit performance presented in the above section, a qualitative test was carried out to prove the feasibility of the Wave-Handling system proposed in this work. All these actuation units were fabricated with the procedure described in the Design and fabrication of the HCDEA unit section and they are exactly the same and with the same initial hydrostatic pressure, which ensured that the surface of the system is level at rest state. Then, we can get various moving shapes of the surface through diverse control methods to meet the practical needs such as conveying and sorting objects. In this study, in the experiment, a parallel moving wave was produced by a well-designed control of the Wave-Handling system to convey a table tennis ball. The actuation units were divided into four groups, which were separated by dashed line, as shown in Figure 14. The

Procedure of determining the four input signals in the experiment. When a wave runs through the system, the membrane deforms over time. We choose the four points to illustrate the control procedure. D, apical displacement of passive membranes of the four groups of actuation units. V, voltage applied on the active membranes of the four groups of HCDEA units.
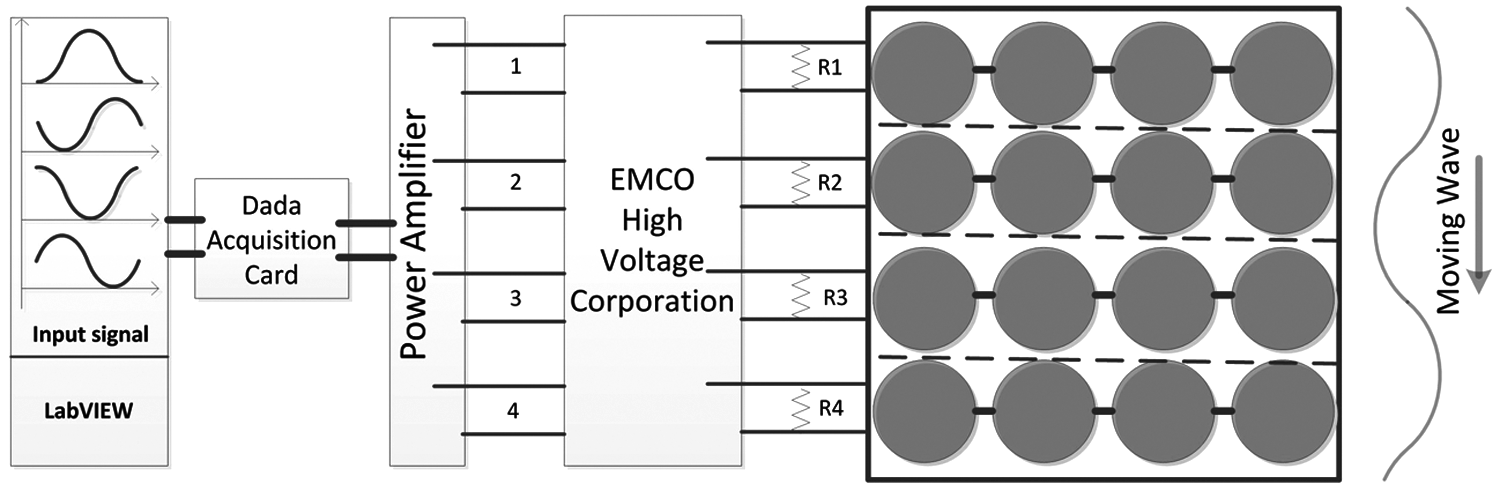
Control circuit of the Wave-Handling system in the experiment. Four sinusoidal signals output through data acquisition card based on the LabVIEW platform are then applied on the HCDEA units after passing through the power and voltage amplifiers. The four signals correspond to the four groups of the actuation units, as shown by the numbers. The resistor, Ri, is placed in parallel with the corresponding group of HCDEA units with the value of 60MΩ.
The specific parallel moving wave could be produced through adjusting the value of amplitude, the value of frequency, and the phase relationship of sinusoidal signals. Finally, the frequency of sinusoidal voltage applied to the actuation unit is 1 Hz, and the voltage offset and amplitude are both 2.15 kV. Figure 15 shows the Wave-Handling system rolling a ball.

The position changes of the ball during two voltage cycles. In initial state
Results and Discussion
A new concept of designing a soft Wave-Handling system based on DE is put forward here. The feasibility of the concept has been proved through the experiments on the simply made prototype of the system. We find that the properties of the DE material play a pivotal role in the performance of the Wave-Handling system. In experiments on the HCDEA unit, the DE (VHB 4910) exhibits strong hysteresis characteristics (Figs. 10 and 11), which are difficult to predict through theory, although the loading curve have been predicted well. This means that it is very necessary to conduct experiments to understand the features of DE devices, especially when the dynamic behaviors of the device are involved, for example, the Wave-Handling system in the article. It can be concluded from the experimental results that the DEs with lower nonlinearity and viscoelasticity will greatly enhance the performance of the whole system. On the other hand, the output force can be adjusted by changing the number of layers of DE membranes without increasing the actuation voltage. Besides, the configuration of the Wave-Handling system can be changed through a different arrangement of the HCDEA units, which may easily make the system achieve modularity and expandability. The size and weight of the whole system can be relatively small and the structure of the handling system can be compact. For simplicity, an open loop control method (Fig. 14) was used to control the system to produce a parallel wave to convey a ball. To make the object transport along a specified trajectory at a proper speed, a certain set of HCDEA units should be activated and the control timing should be regulated. The concept of design of the system makes the control strategy very easy to develop. Even with the presence of hysteresis, nonlinearity, and viscoelasticity of the DE material, many effective control straggles have been developed for DEs. Considering the actual application scenario of the Wave-Handling system in industry, the diversity and flexibility of the resulting wave need more attention than the accuracy. Therefore, the control strategy with less accuracy, but high flexibility, is more favorable for the Wave-Handling system.
Conclusion
In some industries, such as food and biological areas, a conveyor not only needs to transport and simultaneously sort objects but also needs to be soft to ensure the delicate items such as fruit, vegetables, ovine offal, and biological tissues are not destroyed. Current, pneumatically powered, soft manipulating systems inevitably comprise pneumatic circuit, pumps, valves, and pneumatic control systems, which make the design and control of the system more complex. What is more, the whole system may become too cumbersome and expensive for more advanced applications. The DE is a kind of smart material with enormous potential applications in lots of areas, including soft robotics, sensors, energy harvesting, and so on. We design a Wave-Handling system based on the DE to meet the demands of transportation and sorting delicate items. The system consists of 16 DEAs that deform the soft surface, creating a wave motion that transports the objects. We have shown the feasibility of the concept of the design through experiments. Moreover, the handling system is controlled by electronic systems, which greatly simplify the design and control of the Wave-Handling system and reduce the weight and costs of the system at the same time.
The current drawbacks of the Wave-Handling system are primarily set by the material properties of VHB and the fabrication process. With rapid development of material science, when the DE with lower hysteresis and viscoelasticity is developed in the future, it will significantly improve the performance of the handling system. Meanwhile, the new fabrication technology such as 3D printing will play an important role in design and manufacture of DE devices.
We believe that by adopting these new materials and technology, this system will hopefully be widely used in the food and biological industries for automatically transporting and sorting delicate items. The Wave-Handling system could be positioned in the center of a conveying unit to distribute or to transport the goods to the next conveyor. The principle of modularity and expandability opens up new opportunities in applications where subsystems need to be quickly and flexibly integrated into production sequence.
Footnotes
Acknowledgments
This work was supported by the National Natural Science Foundation of China (Grant No. 51675413) and the Integration Project of the Major Research Plan of the Natural Science Foundation of China (Grant No. 91420301).
Author Disclosure Statement
No competing financial interests exit.