
Abstract
Abstract
Soft robot has become a hot topic recently due to its distinct advantages over traditional rigid robots such as high deformability and good impact resistance. However, the coupled deflections of flexile materials bring challenges to soft robotic research in many aspects such as kinematic modeling, dynamic analysis, and control. Besides, unwanted deformations might enlarge external dimensions of soft robots, causing a reduction in the efficiency and bringing about unexpected or harmful contacts with surrounding environments that will significantly affect the robots' performance. In this study, we propose a new inflatable soft actuator driven by two spiral chambers twined with fibers for the first time. A key feature of this actuator is that it possesses a pure and high-efficient torsional motion with no bending and extension movements when works without load, which reduces the difficulties of theoretical analysis and control to some extent. Kinematic model is established by combining virtual work principle and elastic strain energy function for nonlinear flexible materials. The new soft torsional actuator module is carefully designed and fabricated, of which both the kinematic property and output torque are investigated experimentally. Results show that the module exhibits good linearity with air pressure ranging from 35 to 100 kPa, and can provide a torsion angle of up to 110° with an angular displacement accuracy of ±2° in empty loaded conditions; the maximum output torque reaches 0.026 N·m with the corresponding air pressure of 100 kPa. Finally, three soft robots are assembled by utilizing this new, inflatable, pure, soft torsional actuator, and successfully carry out different manipulating tasks. This work might provide some insights into the design of linear soft actuators without coupled deformations in future.
Introduction
I
Soft torsional actuators can be roughly divided into the following four categories: fiber weave actuators,1–5 antagonistic shape actuators,1,6 rotary pneumonic actuators,1,7,8 and pleated chamber actuators.9,10 For example, Paynter et al. 11 made a pneumonic elastic twister with an axially elongated, hollow cylindrical chamber pretwisted by 180°. By varying fluid pressure fed into the elastic shell when the torsional actuator is inflated, the flexible shell of the twister expands, causing the pretwisted actuator to uncoil and rotate the torsion bar output. Tsukagoshi et al. 7 developed a “flat tube” made of urethane that can change its cross-sectional shape from flat to round when pressurized by pneumatics from the inside. By helically stacked into a cylinder, a wound tube actuator can generate rotational motion in conjunction with extension. Ivlev 9 developed a rotary actuator with pleated rotary elastic chambers, which can be operated by gas or liquid and uses a hard motor shell to generate torque from 11 to 20 N·m. Jeong et al. 12 developed DNA-type double-twisting actuators, of which the motions are mainly caused by photoinduced stress differences. These helical actuators can be used as chemical and biological sensors in future. Bishop-Moser et al. 5 developed a parallel combination of a wide class of cylindrical fiber reinforced elastomeric enclosures (FREEs) that can simultaneously provide coupled deflections, including translation, bending, rotations, and screw motions. Martinez et al. 8 fabricated a twisting actuator with a helical patterned paper strip wrapped around a cylindrical pneumatic channel, of which the pressurization both elongates the tube that causes it to twist around its long axis, resulting in a motion that combines twisting and extension. Sanan et al. 1 introduced the principle of an antagonistic shape actuator and designed a fluidic torsional actuator by combining two oppositely oriented helix-like structures into a single structure. By using a fabric to construct the actuator, the motion between the ends of the actuator approximates pure rotational motion with minimal linear motion. Later, they made a rotary Peano actuator by using the same contraction principle as the linear Peano actuators, of which the rotary motion is generated by virtue of their helical arrangement on a cylinder with the change of radial, axial dimensions when pressurized. Connolly et al. 2 reported pressure-driven, mechanically programmable soft actuators with silicone rubber and polymer fibers. By simply varying the fiber angle, they can tune the actuators to achieve a wide range of motions, including axial extension, radial expansion, and twisting. Roche et al. 4 reported a soft actuated material that mimics the biological form/function relationship of the left ventricle of the heart, which possesses multiple DOF and mimics the heart movement with coupled deformations, including twisting and extension.
Previous studies on soft torsional actuators have greatly promoted the development of soft robotics in many aspects such as flexible material, preparation technology, analysis theory, and control method. However, current soft torsional actuators exhibit not pure twisting motion but coupled deflections accompanied by other forms of deformation. Since generating direct twisting motion is difficult, it is more common to design a torsional actuator based on other forms of motion, such as radial or axial expansion. As it is difficult to control the other direction of the deformation, the twisting motion is always coupled with radial or axial expansion and bending distortion. The coupled motions of soft torsional actuators always increase the level of nonlinearity of soft robot systems and bring difficulties and challenges in kinematic modeling and control. Besides, for coupled-motion actuators, substantial energy may be wasted on unwanted deformations, causing an adverse impact on the efficiency of soft robots. What is more, these unwanted deformations might enlarge the robots' external dimensions, bringing about unexpected or harmful contacts with surrounding environments, which will significantly affect the robots' performance such as moving abilities and safety. Therefore, it is interesting and challenging to develop pure-motion soft actuators.
Aiming at developing a pure torsional soft actuator, this article uses the principle of helical twisting and the drive mode of the fluid elastic actuator to directly generate the torsional motion by inflating spiral chambers. First, the design and fabrication of the new spiral-type inflatable pure soft torsional actuator are introduced. Then, kinematic model for describing the relationship between the torsion angle and input air pressure is established based on the principles of virtual work and elastic strain energy function for nonlinear flexible materials. Experiments are carried out to investigate the kinematic properties and output torque of the soft actuator. Finally, by integrating this soft actuator modular with other soft modules, three functional soft robots are built to successfully carry out various tasks such as manipulating and grabbing.
Structural Design and Fabrication
Structural design
There are two basic concepts for the design of the inflatable soft torsional actuator: (1) the actuator possesses a high torsional deformation capability and (2) when twisting, there are no obvious coupled deflections such as bending, extension, and expansion. Based on these concepts, the spiral-type inflatable pure soft torsional actuator is carefully designed, as shown in Figure 1, which mainly consists of cylindrical shell, spiral chambers, and confined layer. The cylindrical shell is made of Smooth-On 0030 silicone, a kind of flexible material with high elasticity and harmlessness to human beings. The two identical spiral chambers that twined with fibers symmetrically distributed around the center of the actuator constitute the driving mechanism, and can generate torsional motion when inflated simultaneously. The spiral chamber is a hollow cylinder surrounded by a thin fiber line, which can limit the chamber's radial deformation and provide the actuator with more pure elongation. One end of spiral chamber is sealed with a harder 50A silicone and the other end is connected to the airway for gas actuation. An inextensible material embedded in the center of the cylinder is used to limit axial elongation and enforce more twisting motion when inflating.

3D model of the spiral-type inflatable pure soft torsional actuator.
With the help of Software Abaqus, the influences of structure parameters on the deformation properties were analyzed, as shown in Supplementary Figures S1–S5 (see Supplementary Data; Supplementary Data are available online at www.liebertpub.com/soro), according to which, the length, outside diameter of the actuator, and the outside diameter of spiral chamber are given by 50, 18, and 6 mm, respectively.
Fabrication
In this work, all the molds are prepared by three-dimensional (3D) printing. The manufacturing process of the actuator involves two main steps: preparation of spiral chambers (Fig. 2a) and fabrication of the outer cylindrical shell (Fig. 2b).

Fabrication process of
(1) Step 1: first, 3D-printed molds are assembled in order, including the bottom cover, rod, pipe, and top cover; second, liquid silicone is poured into the pipe mold and cured at room temperature; and third, fiber is twined around the silicone tube and a molded silica gel is applied to seal one end of the cylindrical chamber.
(2) Step 2: first, the 3D-printed spiral supporting frame is penetrated through the holes of the finished inner chambers; second, 3D-printed molds are assembled in order, including the bottom cover, rod, pipe, and supporting frame; and third, liquid silicone is poured into the pipe mold and cured at room temperature.
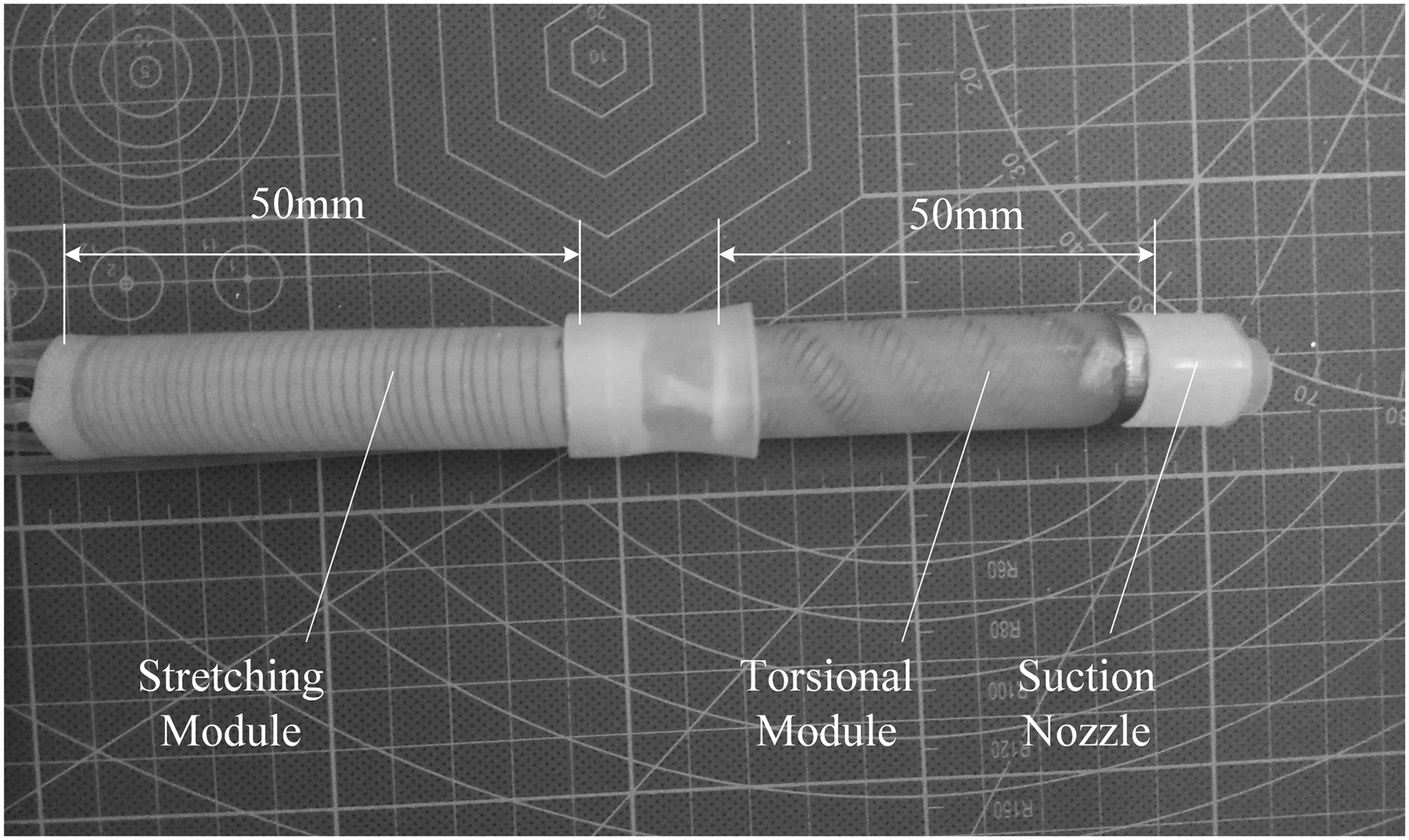
Figure 3 shows the finally fabricated soft actuator module. Two silicone tubes are connected to the airways of the two inner spiral chambers, respectively.

Photo of the fabricated soft torsional actuator module.
Kinematic Modeling
To better understand the underling deformation mechanism of this soft actuator, the analytical model is required to describe the kinematic properties. For each module, the mapping between the system input (air pressure in the spiral chambers, p) and output (actuator torsion angle,

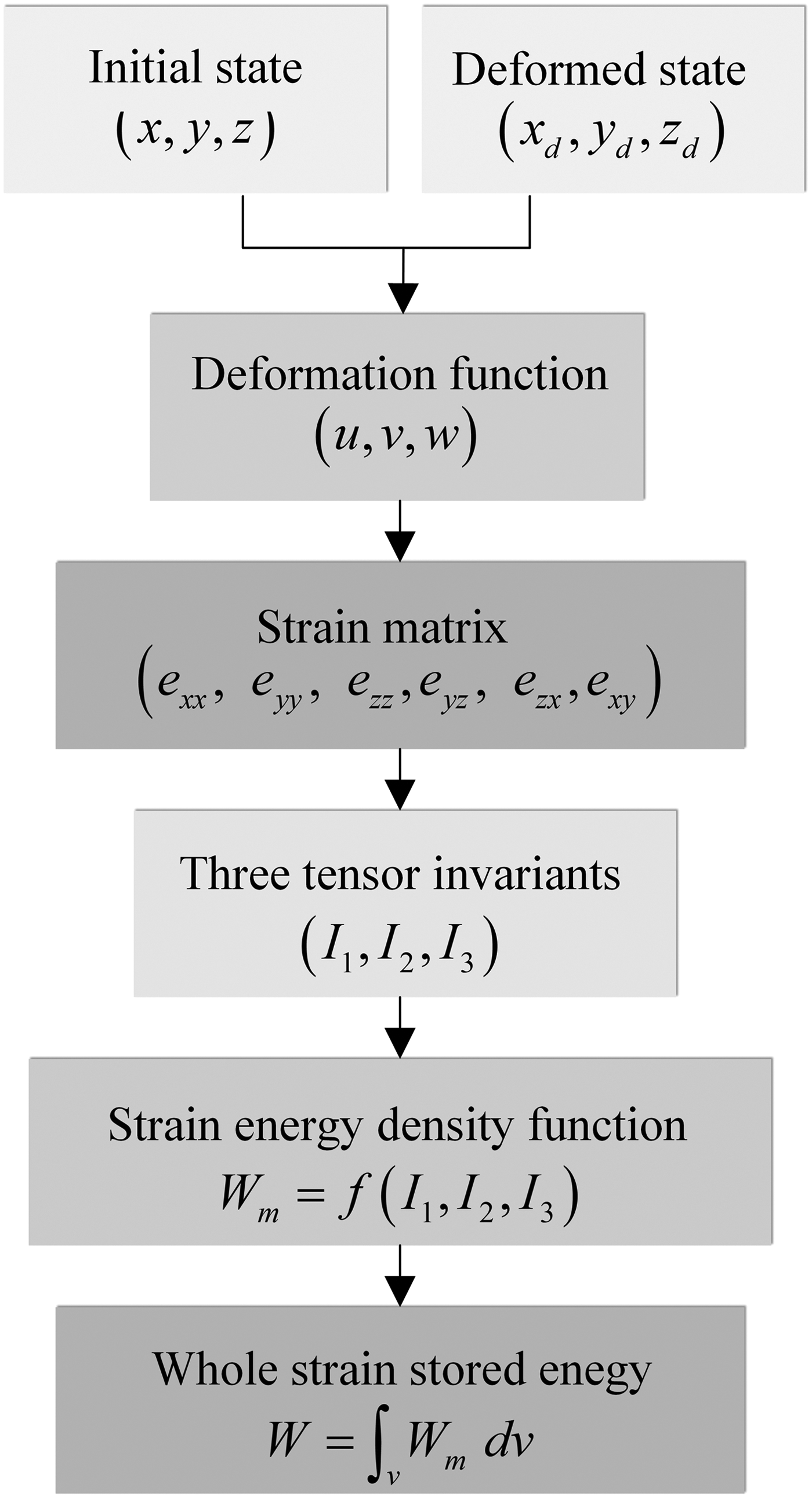
Illustrations of the kinematic modeling process.
Only empty loaded conditions are considered here, and assume that there is no position shift of the gravity center of the actuator when twisting. Then, the principle of virtual work for the system can be expressed as follows:
in which
A method similar to Rivlin's solution for large elastic deformation of isotropic materials
15
is applied to calculate
Illustrations of the stored energy calculation.
Deformation of the cylindrical shell
For the cylindrical shell, assuming that when twisting, each horizontal section normal to z-axis remains plane and only suffers a pure rotation about z-axis through an angle

Illustrations of geometry deformation before and after deformation:
in which
Besides, the volume ratio before and after deformation (
Deformation of the spiral chambers
The spiral chamber is simplified as a hollow cylinder by uncoiling the spiral shape, as shown in Figure 7. The axial elongation rate (

Geometrical relationship between elongation and torsion angle.
in which
in which ri2 is the outer radius of the chamber.
Strain matrix invariants and deformation energy
The strain energy density (Wm) of the incompressible larger deformation material is a function of invariants. For each element of the chamber, the six components of the strain
For a point on the shell, the three invariants are calculated by the following:
For an elastic cylinder undergoing pure torsional deformation, based on Mooney's theory in Ref.,
18
the stored energy density function is postulated by the following:
in which C1 and C2 are empirically determined material constants. The elastic modulus of incompressible material (E) can be expressed by
The total energy stored in the shell can be obtained by integrating over the initial volume domain in cylindrical coordinates:
As
For a hollow elastic cylinder undergoing a large elongation deformation, based on the neo-Hookean model in Ref.,
13
the stored energy density function is given by
The energy stored in the spiral chamber can be found by integrating over the initial volume domain in cylindrical coordinates:
where
Gas virtual work energy
The virtual work of the gas inside the chambers is the inner product of the pressure and the internal volume of the two deformed chambers. The motion speed of this inflatable soft actuator is quiet slow and the thermodynamical effects are neglected in this work. For one chamber, the volume is
The work done by the gas is
where p is the air pressure of the inner spiral chamber.
Sum of virtual work
According to the principle of virtual work, each component of the work can be given as follows:
Thus, the sum is
When the inner spiral chamber undergoes a deformation in the
in which
The final virtual work equation is found by substituting Equations (20), (15) in Equation (17), so the sum becomes
Thus, the relationship between the pressure and the torsion angle is established:
Then the torsion angle can be expressed implicitly as a function of air pressure:
Experiments and Discussion
Kinematic properties
To verify the kinematic model for this new soft torsional actuator, an experimental setup is built as shown in Figure 8, which mainly consists of a LabVIEW PC, data acquisition card, proportional valve, air pump, whole circle instrument, and rotation pointer. The bottom of the torsional module is fixed to the center of the whole circle instrument and a rotation pointer is mounted on top to indicate the torsion angle. Two proportional valves are used to connect a compressor and the airways of the torsional module. The LabVIEW PC is used to adjust the air pressure by controlling the proportional valves. When inflating via the airways, the actuator starts to twist accompanied by the rotation of the pointer fixed on top of the actuator. And from the whole circle instrument, we can read the torsional angle increasing or decreasing with the input air pressure controlled by the LabVIEW PC.

Experimental setup for investigating the kinematic properties of this soft torsional actuator.
We first investigated the coupled deformations of the actuator through a series of experimental photos during a typical inflating process (see Supplementary Video S1). Figure 9 shows the external profiles of the actuator with input air pressure changing from 0 to 90 kPa. A red rectangular frame coincident with the initial external profile of the actuator is added to each photo to help estimate the coupled deformation. It can be seen that there does exist a tiny unwanted deformation, however, it is small enough to be ignored.

Photos of the actuator during a typical inflating process.
Then experiments were carried out to measure the torsional angle of a soft actuator module varying with input air pressure, of which the results were compared with theoretical results obtained by numerically solving Equation (23). In the kinematic model, it is obvious that only the air pressure and the torsion angle are variables, while the other parameters are constants, which can be obtained by direct measurement. Table 1 lists the values of constant parameters used for the numerical solutions.
Figure 10 shows the torsional angle of a soft actuator module varies with input air pressure ranging from 0 to 100 kPa. Both the inflating and deflating processes are considered. It can be seen that the difference between the inflating and deflating processes is small, so the hysteresis behavior of this torsional soft actuator is not obvious; the theoretical results indicate a linear relationship between the torsion angle and air pressure, while the experimental results turn out to be nonlinear one.

Theoretical and experimental results of the torsion angles varying with air pressure.
Besides, it is interesting to find that when the air pressure is above 35 kPa, this soft torsional actuator possesses near-linear kinematic properties both theoretically and experimentally, with an offset of approximate constant (≈20°) between the theoretical and experimental results. Besides fabrication errors, several causes might be contributed to the discrepancies: first, because of end effects, 2 the minor structural difference between the two ends and the rest part of the spiral chamber leads to nonuniform deformations; second, because the spiral chambers and the shell do not closely fit together, some slight slippage exists at the spiral chamber/shell interface 4 ; what is more, there exist gaps between the fabric fiber circles, so when inflating, the spiral chamber not only extents axially but also expands radially in the gaps, which consumes a small fraction of energy. That is why the experimental results are smaller than theoretical results.
The actuator can provide a torsion angle of up to 110° with the corresponding air pressure of 100 kPa. Considering that when the air pressure bellows 35 kPa the actuator is in the preloading stage, to build linear systems that are easy to control and possess high positional accuracy, this actuator module can be set to work in the conditions of the air pressure ranging from 35 to 100 kPa. Then according to Equation (23), the relationship between the torsional angle and air pressure can be expressed by the following:
In addition, the angular displacement accuracy of this soft actuator module is investigated. Considering the hysteresis effects as shown in Figure 10, there exist some differences between the inflating and deflating processes. Therefore, two groups of experiments are carried out, where only empty loaded conditions are considered as well. Group 1 records the torsion angle errors between the actual results during the inflating process and theoretical results obtained from Equation (23), with the air pressure gradually increasing from 0 to 100 kPa. While Group 2 records the torsion angle errors with the air pressure gradually decreasing from 100 to 0 kPa, corresponding to the deflating process. Experiments of each group repeat five times with the results being averaged.
Figure 11 illustrates the average errors varying with torsion angle, from which it can be clearly seen that the angular displacement accuracy of this soft actuator module is within ±2° both in the inflating and deflating processes; the maximum difference between Group 1 and 2 is about 0.8° with the torsion angle of 45°, indicating that the soft actuator can be treated as a linear one in the conditions of the working air pressure ranging from 35 to 100 kPa.

The angle error between the simulation results and experiment results.
Output torque
As one of the main parameters of torsional actuator, the output torque directly determined the load capacity and greatly affected the respond speed, especially for applications with high load or high-load inertia requirements. To measure the torques that the actuator can generate, an experimental setup was established as shown in Figure 12, which mainly consisted of a force sensor, rotation pointer, and support. Figure 13 shows the experimental results (see Supplementary Video S1). It can be seen that the relationship between the air pressure and output torque is nonlinear. However, when the air pressure ranges from 35 to 100 kPa, this new soft torsional actuator appears to be of good linearity. The output torque can reach 0.026 N·m with the corresponding air pressure of 100 kPa. Although this actuator possesses good twisting property, its output torque is relatively low compared to some rigid rotating joints. Therefore, this actuator is only suitable for low load and low-load inertia applications such as light food and toy packaging and fragile object manipulating. However, the output torque can be raised by utilizing materials with a higher Young's modulus or using variable stiffness mechanisms (the stiffness of this erosional actuator is shown in Supplementary Figures S6 and S7), and then, the application of the actuator can be extended to various areas such as minimally invasive surgery (MIS) and pipeline inspection, which are beyond the scope of this work and not discussed in detail here.

Experimental setup for output torque measurements.

Illustrations of the output torque varying with air pressure.
Experiments on soft torsional actuator module-integrated soft robots
To further test the twisting function, in this section, we assembled three different soft robots by utilizing this new soft torsional actuator together with other functional soft modules we have developed in previous studies, 19 including bending modules and elongation modules. The motion of the soft torsional actuator is controlled by utilizing the above kinematic model. Three experiments with different soft robots involving shaped hole assembly, transferring in simulated complex stenosis of a stomach model, and mimicking the twisting motion of hand twist are designed to demonstrate the torsional capability (see Supplementary Video S1).
(1) Soft robot for shaped hole assembly
Unlike the insertion of a cylindrical pin directly into a hole, an orientation-specific pin needs to rotate to match the shape of the hole before insertion. The soft torsional actuator takes itself as the center of rotation, which can be used to adjust the orientation of objects to fit the shape of the holes. As shown in Figure 14, the assembled soft system consists of an elongation module and a torsional module. The former is used to perform the lifting and insertion operations, and the latter is used to produce a twisting motion. There is also a suction nozzle mounted at the end, which can grasp objects. The experiment uses four different shapes of objects: elliptical, triangular, rectangular, and star, which need to be put into the corresponding holes (Fig. 15a). As the shapes and the holes are misaligned, the former needs to rotate to fit the holes. The experiment requires that the four kinds of shapes should be placed into the corresponding hole in the imitative automatic assembly line.
Assembled robot for shaped hole assembly.
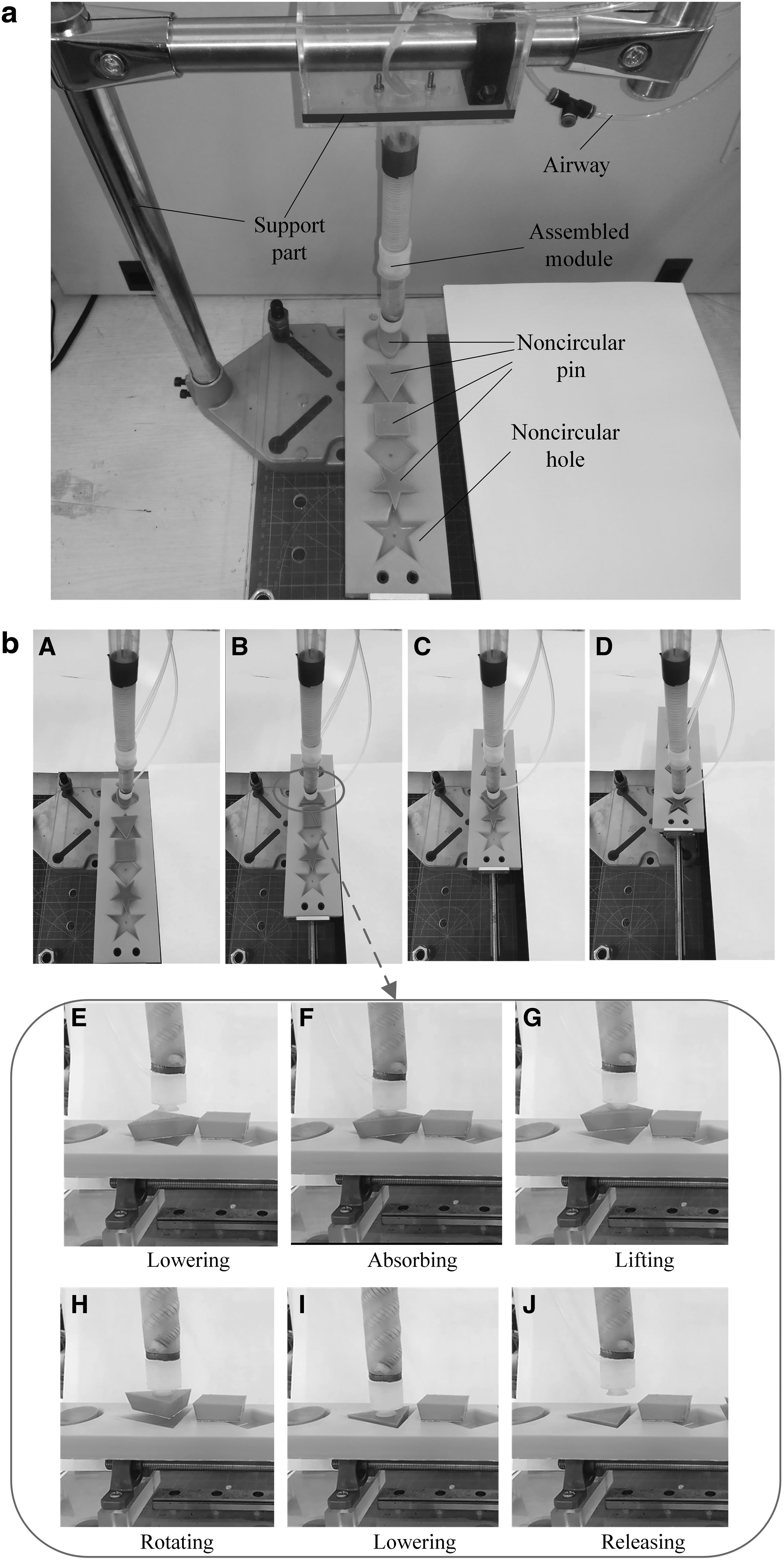
The whole experimental process is shown in Figure 15b. By sequentially picking up the shaped objects with the suction nozzle, lifting and moving, rotating and matching, lowering and inserting, the assembly task is completed, which proves that the developed soft torsional module has a good twisting ability and can adapt to various torsion angles.
(2) Soft robot for transferring in simulated complex stenosis of a stomach model
The features of the human stomach are complex and narrow due to the curved surface of esophagus and stomach. In MIS of the stomach, if the tools can change the angle and attitude to fit the stomach environment, it will be more convenient to perform cleaning, transferring, dressing, and other operation tasks.
The robotic arm assembled here consists of three bending modules, a torsional module, and a suction nozzle at the end. The bending modules are responsible for accessing the stomach and moving the objects through the esophagus. The torsional module is responsible for rotating objects into a specific orientation. For the purpose of reducing the resistance between the soft material and the environment, several rings made of aluminum wires are installed at regular intervals along the soft arm and the whole experimental environment is in water. The soft torsional module has the ability to twist and by operating with the bending module (Fig. 16), it can access the stomach model and rotate to achieve a specific attitude.

Assembled robot for transferring in simulated complex stenosis of the stomach.
This experiment uses a hyper-redundant soft robotic arm to enter the 3D stomach model (Fig. 17a) and operate the objects inside it. The soft modules are controlled by the LabVIEW PC, while the feed motion of the robotic arm is held by a user in an open-loop approach. The experiment requires that the robotic arm passes through the stomach model to move the objects to a specific position and attitude. As shown in Figure 17b, the soft robotic arm enters from the entrance of the stomach model and passes through the curved tube to reach the stomach interior. The objects, initially unordered on one side of the stomach, are grasped and transferred to the other, and are rotated by the torsional module one by one into alphabetical order.

The successful completion of this task verifies that the torsional module can increase the robotic arm's flexibility by adding a twist DOF at the end. As it can better adapt to the surface of the stomach through the rotation of objects or surgical tools, it would be useful in the development of soft medical robots toward MIS in the future.
(3) Mimicking the motion of hand wrist
The torsional motion of hand wrist greatly increases the flexibility for human beings to operate or grab items, even in complex and narrow spaces. In this work, we assembled a soft hand by utilizing this soft torsional actuator and five inflatable bending soft fingers that we developed in previous work, 19 as shown in Figure 18. The soft finger, which is also made of silicone with a radius and length of 5 and 60 mm, respectively, is driven by three straight chambers symmetrically distributed around the center of the finger and omnidirectional bending capability. The fabricated soft hand is about 80 mm wide and 200 mm high with a 3D-printed palm, and can be easily programmed and controlled to grab light objects with different shapes such as paper cups, pens, and plastic balls. Figure 19 shows the processes of the hand manipulating different objects to rotate from one position to another.

Photo of the fabricated soft hand.

Process of the soft hand manipulating objects with different shapes:
Conclusions
A new inflatable soft torsional actuator is proposed for the first time by using two spiral chambers twined with fibers as driving mechanism. The actuator possesses a pure torsional motion with no obvious coupled deformations such as bending, extension, and expansion, in empty loaded conditions, greatly reducing the difficulties of kinematic modeling.
For the kinematic properties, this soft actuator exhibits good linearity with air pressure ranging from 35 to 100 kPa, and can provide a torsion angle of up to 110° with an angular displacement accuracy of ±2° in empty loaded conditions. Based on the virtual work principle, an analytical model is established for describing the kinematic properties of the actuator by applying elastic strain energy function for nonlinear flexible materials. Although experiments reveal that there exists an error, ignoring the preloading stage, theoretical results are in agreement with experimental data with an offset of approximate constant, indicating that this analytical model provides insight into kinematic analysis of other pure deformation soft actuators. The output torque also has a significant linear correlation with the air pressure ranging from 35 to 100 kPa, with the highest value of up to 0.026 N·m.
Experiments on soft torsional actuator module-integrated soft robots indicate that this spiral-type inflatable pure soft torsional actuator might have potential applications in many areas such as medical treatment, rehabilitation training, and manipulating. Future work will also focus on improving the kinematic model by taking radial expansions of spiral chamber into consideration, developing linear and pure-motion soft actuators with different forms of deformation, and assembling multifunctional soft robot systems by using these actuators such as soft manipulator and hands.
Footnotes
Acknowledgments
This work is mainly supported by the Open Project Program of Key Laboratory of Preparation and Application of Environmental Friendly Materials (Jilin Normal University), Ministry of Education, China (No. 2017011), and Self-Planned Task of State Key Laboratory of Robotics and Systems (No. SKLRS201804C).
Author Disclosure Statement
No competing financial interests exist.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.