
Abstract
Some applications are very sensitive to the weight of the robot, such as space manipulation or any untethered mobile manipulation. In this article, we designed a five-module unilaterally bending serial manipulator with length of 32 cm and a weight of only 18 g. The manipulator is driven by dielectric elastomer actuators (DEAs). Each module consists of a spatially closed tubular structure, which has the capability of large deformation while simultaneously maintaining torsional rigidity. The design is based on the buckling of columns. To achieve global deformation continuously, each module was controlled independently by a multichannel high-voltage power supply. As a demo, the manipulator was able to enter and exit a narrow L-shaped pipe. Experiments demonstrate that the manipulator driven by spatial DEAs can be super lightweight and can realize large continuous deformation.
Introduction
Soft robots, due to their high flexibility and adaptability, have broad prospects in unstructured environments such as human–machine collaboration, flexible grasping, medical surgery and rehabilitation, machine maintenance and repair, and narrow space exploration. 1 Soft manipulators are a typical form of soft robots. Compared with rigid serial manipulators, soft manipulators have many advantages, such as highly redundant degrees of freedoms (DOFs) from their intrinsic series elastic elements, higher human–machine adaptability, lighter weight, and lower cost overall.1–4 They can service missions involving underwater manipulation, performing wearable assistance, and finding many medical applications.5,6
Most current soft manipulators are based on the muscular hydrostat systems of the appendages of various animals such as elephant trunks, octopus tentacles, and earthworms.7–9 In these systems, transverse and longitudinal muscle groups act as the actuators to produce bending movement. To mimic this biological movement, several types of driving methods have been employed to simulate the muscles of these animals, such as through cable, fluid pressure, or shape memory alloys (SMAs).10–12 Each method has its own merits and demerits; a brief comparison of these driving methods is given in Table 1.
Comparison of Driving Methods for Soft Manipulators
DEA, dielectric elastomer actuator; SMA, shape memory alloy.
The cable-driven manipulators cannot realize a deformation larger than that of pneumatic actuators because the movement is produced by local shortening that is limited by the cables needing to remain in tension; however, it is potentially flexible and capable of continuous motion.13,14 For pneumatic manipulators, it is difficult to realize precise positioning because the driving compressed air expands soft silicone, causing low rigidity and low resistance to vibration. 15 SMAs have better performance, but a key drawback is the slow response and difficulty to hold in any precise position caused by its crystal structure transformation characteristics. 16
As a kind of smart material, dielectric elastomer actuators (DEAs) driven by an electric field can realize large voltage-induced strains. They have a fast response, intrinsic compliance, easy to realize high DOFs, and high energy densities.15–21 Considering these attractive advantages and potential applications of DEAs, various soft robots driven by dielectric elastomers (DEs) have been developed, such as climbing robots with electrostatic adherence ability, grasping robots with stiffness variation, soft manipulators with spring skeletons, and swimming robots.22–31 Soft bending actuators are a kind of soft manipulators, which can only achieve bending movement for smaller radii of curvature to perform grasping, crawling, or in-plane locomotion, they also have a variety of driving methods, such as DE, pneumatic, cable, and others. 32
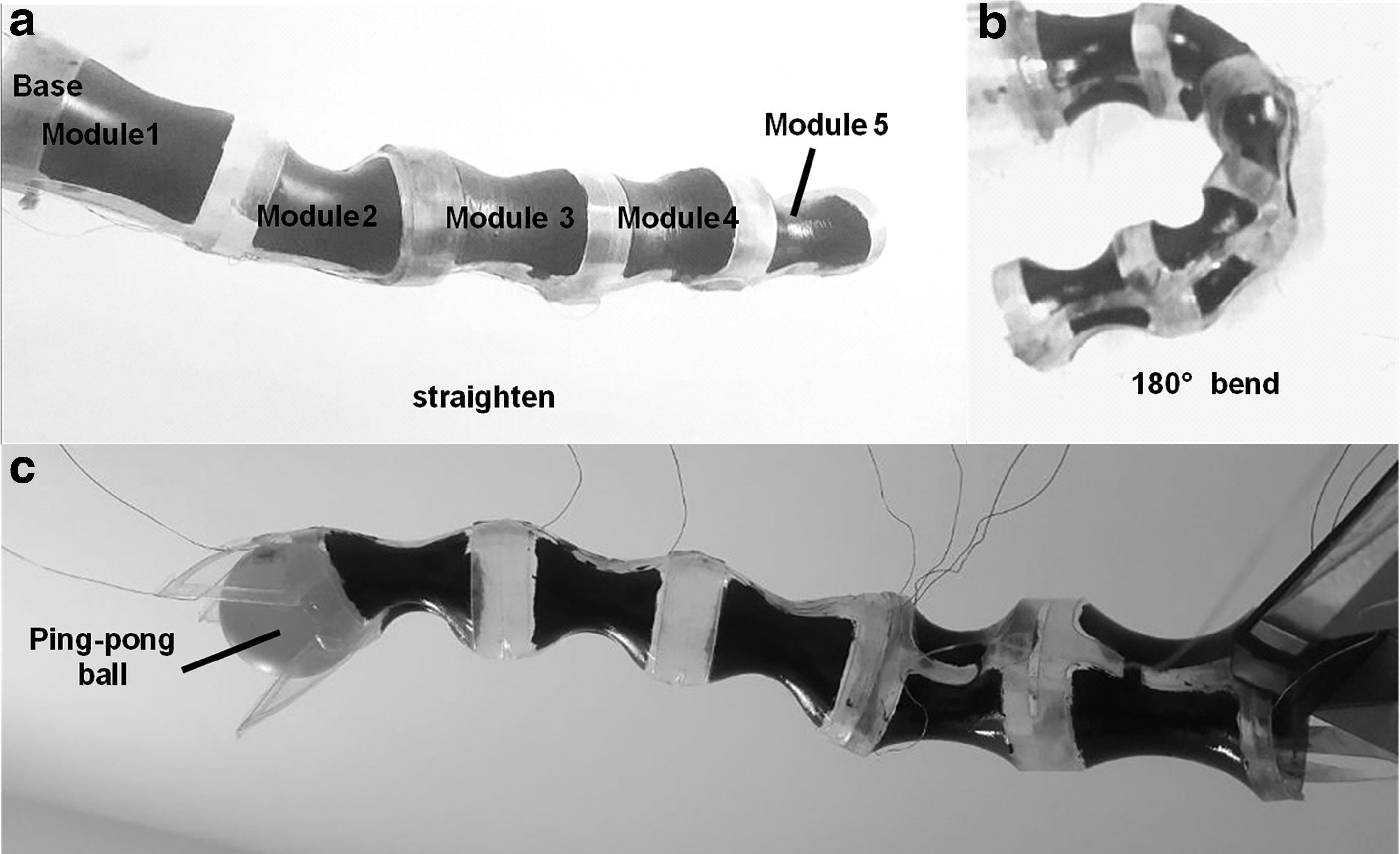
In this article, we have designed a finger-like manipulator consisting of a series of linked tubular actuators, and the manipulator can globally deform >180° and has the ability to stay static at any angle within this range. Based on these modules, a super-lightweight manipulator was fabricated that can undergo large and continuous deformations (Fig. 1).
Principle of Large Deformation of the Module
The manipulator is composed of identical modules that were serially connected one-by-one. The module is a closed tubular structure driven by DE films. The principle of the large deformation of the tubular structure is as follows: the gradually increasing buckling of the column is generated by a radial force caused by the restoring force of the prestretched DE films as shown in Figure 2. To achieve a large bending deformation by small axial shrinkage, the column (shown in Fig. 2) of the structure is designed analogous to a loaded beam, and the top plane ABC will rotate for a large angle if the beam buckles as shown in Figure 2c. In addition, the buckled segment can increase the torsional rigidity of the system. The pressure on the column is caused by two prestretched DE films. The frames were fabricated by rolling a laser-cut polyethylene terephthalate (PET) supporting frame into a spatial tubular structure. Fabrication details of the module and the manipulator will be introduced in the later section “Fabrication of the Manipulator.” The DE film is a layer of 400% × 400% biaxially prestrained VHB™ 4910, which had an initial thickness of 1 mm.

A simplified module.
The PET frames (shown in red in Fig. 2d) will deform once adhered to the prestretched DE films, and this interaction force can be decomposed into a radial force Fn and a tangential force Ft. Fn makes the frame elliptical and bends the column inward and Ft will cancel each other out on the column.
Performance Analysis and Parameter Design of the Module
Load capacity, bending angle, repeatability, and response time must be taken into account while designing a soft manipulator. The performance of each constituent module determines the performance of the manipulator as a whole. Owing to the irregular surface of the DE film on the module, complicated strain distribution, and strong nonlinear constitutive relations of DE materials, the analytical deformation analysis is not trivial. Therefore, as a simplified approach, we tried an experimental method to optimize the desired bending angle and stiffness of the structure, which are defined by the height of the tubular structure, the thickness and width of the PET column, and the number of DE films. Because the driving modules could be considered as part of a tube that can be normalized by a dimensionless ratio of diameter to height, that is, the two modules with the same ratio have similar deformation characteristics. Therefore, the analysis of the influence of height is sufficient to design the modules between the two parameters of height and diameter. For convenience of fabrication, diameter D of the module is chosen as a constant value of 50 mm, and the height was let to change to allow for deformation of the module. Parameters of the module are defined in terms of the unfolded planar shape of each module, shown in Figure 3.

The original planar shape and parameters of the module.
Based on experiments, the deformations of the module with different values of b and l were obtained and shown in Figure 4. In general, the bending angle will increase as the height increases as the width b decreases.

To improve the driving performance of the module, more layers of DE films should be applied and values of the parameters should also be changed. To test the driving performance of the module with different number of layers of DE films, some modules with different parameters were fabricated, the values chosen based on the condition that the output deformation angle should be >45°, and the maximum bending moment M should be >20 Nmm. The parameters of the module are listed in Table 2. All the parameters of the PET frame are the same except the thickness t and width b. The bending angle, response time, and output torque were tested to demonstrate the performance of the driving modules.
Parameters of the Planar Polyethylene Terephthalate Frame
The bending angles with different applied voltages are shown in Figure 5a. The output deformation angles are >45° in both modules with single or double DE layers, which demonstrates the excellent deformation ability of the module. However, the response time of the module is slow and the data are shown in Figure 5b; the slow response may be caused by the increased thickness of DE film after the column has largely buckled. The output torque increases with the number of DE layers as does the potential driving ability of the DE film if stacked to many layers.

Experimental results of the driving modules.
Fabrication of the Manipulator
The manipulator is composed of five modules, and the modules closer to the base were made to be stronger to drive the other modules closer to the end. Therefore, the modules near to base should have more layers or a larger area of DE films. Modules 1 and 2 (shown in Fig. 1) were designed with two layers, and modules 3, 4, and 5 were designed with only one layer. Modules 1 and 2 were fabricated together using only one piece of PET, and modules 3, 4, and 5 were fabricated together using another single piece of PET. Then the two structures were connected, and a manipulator with five DOFs was fabricated. The procedure to fabricate modules 3, 4, and 5 is shown in Figure 6, and modules 1 and 2 were fabricated by the same procedure.

Fabrication process of modules 3, 4, and 5.
Here are the details of the fabrication process. First, the VHB™ 4910 film was prestretched; conductive carbon paste electrodes were patterned and fine wires were connected under the protection of a mask; second, a flexible laser-cut PET frame was attached to the VHB film. The shape and geometric parameters of the frame before wrapping are shown in Figure 7 and Table 2; then, the entire module was cut around the edges and then was wrapped into a tubular structure. Finally, the two segments were connected into one manipulator. When more than one layer of DE film was used, a stacking procedure illustrated in Figure 8 was additionally performed. After application of flexible electrodes on opposite sides, the DE film can act as an actuator by applying a low-power high voltage between the electrodes.


Schematic of the control system.
Controller
The DEs require high driving voltages, so we designed a custom controller that can generate multichannel adjustable high voltages ranging from 0 to 15 kV as shown in Figure 8. Each channel has the same circuit layout: a normally closed and a normally open high-voltage relay were used to compose a charge–discharge circuit for each DE module, and hence the circuit can control every module independently. The relays are switched by signals from a programmable logic controller (PLC). An EMCO amplifier could amplify the input signal 1000-fold, input by a DC voltage signal generator with variable DC lower voltage (0–15 V). During operation, if the given DE module was required to receive a 0–6 kV voltage in linear increasing mode, the PLC controller would send a signal to let the signal generator output a 0–6 V voltage. Then the EMCO would amplify the voltage to drive the DE, and the working cycle was controlled by switching the relays, which were also controlled by the PLC.
Functional Demonstration
To test the deformation capabilities of the soft manipulator, a prototype composed of five modules was fabricated, and a simulation of pipeline navigation was demonstrated. As shown in Figure 9, the manipulator was tasked to pass through an L-shaped pipe. In the experiment, each module was controlled independently by our controller, and the sequence of movements of the modules is shown in Figure 9a. Experimental results demonstrate that the manipulator is able to navigate an L-shaped pipe successfully. For other pipe shapes, the voltages can be applied to each module to achieve other suitable shapes. Moreover, the manipulator made with three or five modules, shown in Figure 1c and 9b, also demonstrated grasping tasks, such as by grasping a ping-pong ball.

Discussion
In this article, a manipulator with five modules bending in the same direction was fabricated and demonstrated, which could only manipulate within a single plane. Compared with soft spring manipulators driven by DEAs in previous studies, our manipulator has lighter weight and a completely nonrigid structure with only a thin tube, although spring actuators can also move out-of-plane. The tube is made of a PET film that is much more compliant than the metal spring used in spring manipulators. Moreover, bistable actuators usually shaped like bent rulers that have larger bending angles; however, its torsional stiffness is usually low, resulting in very poor load capacities and even cannot hold its own weight.
To expand movement flexibility of the manipulator into spatial space, we can serially connect three driving modules in a circular arrangement at intervals of 120°, so that omnidirectional bending can be achieved, as shown in Figure 10.

Different joint arrangements of the manipulator made into different workspaces.
The load capability of the manipulator demonstrated in this article is quite poor because no more than three layers of DE films were staked to fabricate the module. The ability to stack more layers was limited by the manual fabrication process, so only a 2.7 g ping-pong ball could be carried by a small gripper, as shown in Figure 10. The payload-to-weight ratio of the manipulator is about 0.15. More than the current, two layers of DE films can be added to increase the load capability of the manipulator considerably, which was not investigated in this article. In the future, through more specialized equipment, more layers of DE films could be applied to drive the manipulator and a larger output torque could be obtained. In addition, some other electroactive materials, such as PVC gel, are also under development,15,33 which can be applied to drive the manipulator in the future.
Conclusion
In this article, a soft and super lightweight manipulator driven by DE films was proposed and tested. The global deformation of the manipulator was based on local deformation of each tubular module, and its length was >32 cm, but weighed only 18 g. The manipulator could be conveniently fabricated into different initial shapes capable of differing motion flexibility by changing the offset angle between adjacent modules. Since the analytical relationship between the angular displacement and the parameters was difficult to obtain, we proposed a simpler parametric design approach for the tubular module.
A prototype driven by five modules was fabricated, and the manipulator was capable of entering and navigating an L-shaped pipe by actively altering its shape. The manipulator could realize a continuous deformation in adapting to the shape of the pipe. The components of the manipulator are quite simple; there is nothing but a tube (made of PET or other flexible plastic), DE films, and complaint electrodes; there is no transmission component. By using more layers of DE films, a larger load-to-weight ratio can be obtained in the future.
Footnotes
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This study was supported by the National Natural Science Foundation of China (Grant No. 91648106), the Natural Science Foundation of Shandong Province (Grant No. ZR2016EEM16), and the Foundation of State Key Laboratory of Mechanical Strength and Vibration (Grant No. SV2016-KF-13).
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.