
Abstract
Despite that various soft bending actuators have been presented in recent years, their widespread application in knee assistive devices is still hindered by their uncomfortable geometry, limited torque output, control complexity, and high cost to enhance the knee joint during various human movements. Inspired by accordion bellows, we proposed a novel design of foldable pneumatic bending actuators (FPBAs) in this study, which were fabricated with the thermoplastic polyurethane fabric materials. FPBAs could produce torque by the inflation or interactive compression of their interconnect air chambers with no airflow restriction occurring at any bending angle. General mechanical equations for FPBAs were derived to characterize their output torque as functions of their geometry and internal air pressure. To evaluate the feasibility of FPBAs, a specific prototype with rectangular chambers was constructed and tested by mechanical experiments. A knee exosuit equipped with the prototype was also designed, and five subjects were recruited to perform static postures in knee rehabilitation training with and without the assistance of the knee exosuit. Subjects' persistence time and knee extensors' surface electromyography signals were recorded and compared, which verified the assisting effects of the knee exosuit. Besides knee assistive devices, the FPBAs could also be applied to other soft robots thanks to their competitive advantages, such as flexibility, large torque output, low-pressure input, simple fabrication process, light weight, and low cost.
Introduction
As the largest and most complex joint in the human body, the knee joint is vulnerable and easy to be suffered from osteoarthritis (OA). 1 Knee OA is a common degenerative joint diseases, especially among the elderly, obese individuals and people who exercise strenuously frequently.2,3 The damaged or missing cartilage increases the friction between bones and leads to other abnormalities, making the patients feel pain in daily activities when they are walking, running, squatting, or climbing stairs. At present, the medical treatments to knee injuries and OA are mainly palliative medication, surgery, and nursing-assisted rehabilitation training.
These traditional treatments are time-consuming and expensive, and most of them could have unpleasant side effects. However, due to their autonomous and nonintrusive properties, wearable knee assistive devices may be a potential solution to prevent people from knee injuries and OA, and to help patients with knee injuries and OA relieve from the pain and rehabilitate via targeted training in their daily activities.
Extensive research on knee assistive devices was performed in the form of rigid exoskeleton structures in the past few years.4,5 Most of them used motors assembled with transmissions and bearings or springs coupled with clutches as their actuators.6–8 Despite that the actuation technologies of knee exoskeletons have made great progress, their widespread application is still limited because of their huge weight and rigid design. The huge weight of these actuators affected the natural energetics and biomechanics of users,9,10 which could increase the metabolic burden and finally aggravate device abandonment. 11
In addition, because of their rigid designs, most knee exoskeletons failed to mimic the real knee joint, which had an unfixed axis of rotation. 12 The misalignment between the exoskeleton and human knee leads to skin irritation and unwanted additional loading,13,14 which may further aggravate the injuries and OA of knee joints. Moreover, the exoskeletons were hard to control and the price was high, which also limited their wider application to assist human knee joints.4,11 Therefore, it is necessary to develop innovative soft actuators that are portable, controllable (complex response to simple input), and cheap for wearable knee assistive devices.
Research on soft actuators made of various flexible materials has become a hotspot in the field of robotics.15–19 For example, the shape-memory alloy (SMA) actuators could return to their original form when subjected to a memorization process between two transformation phases. They are temperature or magnetic field dependent, but these transformations are at the cost of hysteresis and low response time. 20 Electroactive polymer (EAP) actuators could produce substantial deformations in the presence of an electric field, but high voltages or hermetic encapsulation is required. 21
Although significant progress has been made in the field of SMA and EAP actuators, there still exist barriers to their practical applications in wearable knee robotics. Bowden cables, as another kind of soft actuators, have been successfully applied to wearable robots for walking assistance and gait rehabilitation for patients after stroke.22–24 However, because of their linear mechanisms, Bowden cables require that metal structures and bearings serve as a transmission that converts linear motion into rotary motion.
Soft pneumatic actuators (SPAs) actuated by compressed air are also commonly used in soft robotics due to their low weight, large actuation stress and deformation, and low cost.25–31 The McKibben actuator is one of the most popular SPAs, which could produce a linear contraction and large force. 32 To drive the bending movement of wearable robots, however, they also need to convert the linear contraction into the rotary motion. 33
Inspired by the McKibben-style actuators, researchers have designed fiber-reinforced bending (FRB) actuators to produce bending deformation directly. 34 Unfortunately, high pressures (>100 kPa) are needed for both the McKibben and FRB actuators, 29 which are unsafe to assist the human movement. In case the material or the seal of the devices is damaged, the high pressure will cause harm to the human body. The hybrid bending actuators consisting of soft air chambers and external rigid or origami shell have also been presented,35,36 but the fabrication process of them is so complicated that it could not be industrialized.
Thermoplastic polyurethane (TPU) fabric air bags as the passive load-bearing structures have been widely used in medical, sports, and construction industries, such as the positioning airbags for doors and windows. Recently, TPU fabric air bags have also attracted the attention of researchers in the field of SPAs, because of their advantages, including availability, affordability, safety, comfort, good wear resistance, high output torque produced by lower air pressure, and simple fabrication methods.
For example, Natividad et al. 37 developed a reconfigurable pneumatic bending actuator (PBA) with replaceable inflation modules that were in the form of air bags fabricated by sealing a TPU-coated nylon fabric. Nesler et al. 38 designed and evaluated a Mylar film balloon actuator that could perform human-scale mechanical work by self-intersection, but extreme deflection angles of the actuator might restrict airflow during the inflation or exhaust process.
In addition, SPAs made of TPU fabric materials have also been applied to wearable robotic systems. Natividad and Yeow 39 developed a wearable shoulder exosuit centered around a TPU fabric beam to assist the rehabilitation practice of the cerebral palsy patients. O'Neill et al. 40 presented a soft wearable shoulder robot with TPU actuators, however, the two distal chambers of its abduction actuator minimally contributed to the moment generation due to their reduced moment arm.
Sridar et al.41,42 demonstrated the feasibility of I cross-section TPU actuators to assist knee rehabilitation during the swing phase of walking, but the other phases of walking were not considered. Also, two of the I cross-section TPU actuators could only produce a torque of 4.4 N·m, which was not enough to assist the knee joints during other movements, such as deep flexion, stair ascent or descent, and running. In a word, the output angle range and output torque of TPU actuators need further improvement to be applied into knee assistive devices, which motivates us to shorten such a gap.
Inspired by the accordion bellows, in this article, we present a novel design of foldable pneumatic bending actuators (FPBAs) made of TPU fabric materials, which could be commonly used in air bags of various massage apparatuses, for example, massage armchairs and eye massage instruments. The most obvious difference between the new designed prototype and other similar devices is the way in which its air chambers are connected.
As depicted in step 3 of Figure 1, the heat-sealing connection areas of adjacent chambers are approximately triangular (upper narrow and lower wide) and an air vent is designed in the area, which ensures that the airflow inside the FPBAs is always unobstructed. Also, through this kind of connection method, the FPBA itself could bend naturally as long as it is inflated or deflated, unlike other bending actuators, which require additional components, such as the strain-constraining fabric, 43 the guiding TPU spine, 37 or the origami-based folded paper shell, 36 to guide the bending movement. In addition, the novel design of FPBAs could not only avoid the limitations of other actuators' bending angle range and airflow blocking but also provide more torque than other pneumatic devices, under the same input pressure conditions.
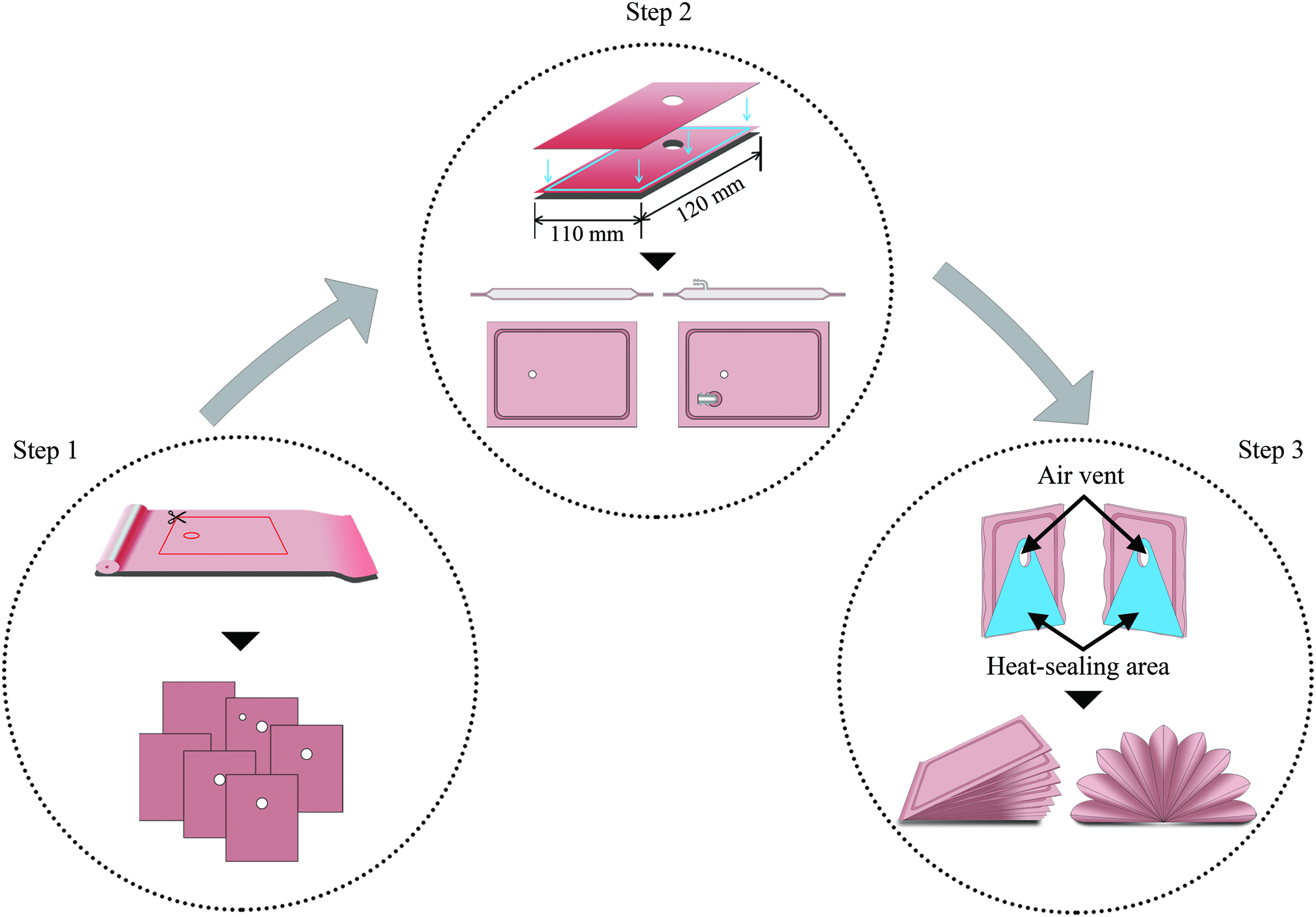
Fabrication steps for the FPBA prototype. Step 1: Cut the TPU fabric materials into rectangular sheets with a suitable size. Step 2: Heat seal the periphery of each air chamber and install the air tap on one of the chambers. Step 3: Connect all the air chambers as a whole by heat sealing the blue triangular heat-sealing areas between two adjacent chambers. The positions for these preset circular air vents are not heat sealed, because they are designed for airflow between chambers. TPU, thermoplastic polyurethanes. Color images are available online.
Here we present the novel design of FPBAs along with the governing equations and experiments to test their performance.
Materials and Methods
Biomechanics and design requirements
To set the performance requirements for FPBAs, we investigated the existing literature on the biomechanics of human movements and collected the kinematic and dynamic data of the knee joint in common human movement forms.44–47
As illustrated in Figure 2, the flexion angle

The illustration of the annotated flexion angel α of the human knee joint. The flexion angle α is defined as the angle between the femur and the tibia of the human body in sagittal plane.
The maximum flexion angles and peak torque of the knee joint in various forms of human movements are listed in Table 1. It should be noted that the peak torque of the knee joint refers to the maximum net torque generated by the muscles and other body structures around knee joints during movement. In addition, because the knee joint torque data have different unified standards in different literature, we hypothesized a virtual individual with 65 kg in weight and 1.75 m in height for the following analysis. The data of peak knee joint torque of the virtual individual are listed in the fourth column of Table 1.
Peak Knee Angles and Torque in Various Human Movements
The data are estimated from curves in the literature.
As summarized in Table 1, the variation range of
Also, it should be noted that completely replacing the torque function of knee joints could lead to muscle atrophy or other side effects. Therefore, considering the prevention and rehabilitation of knee injuries and OA, a part assistance of the peak torque is enough to enforce the knee joint during various human movements.
From the above analysis, we could acquire two basic design requirements for the FPBAs: first, FPBAs should be able to generate bending motion between 0° and 150.4° knee flexion angles; and second, they should provide enough torque assistance to the knee joint in various postures.
The new design of FPBAs
Based on the above requirements, we propose a novel design of FPBAs with the inspiration of accordion bellows in this article. Similar but not identical to accordion bellows, FPBAs on one side are fixed together and they could rotate freely on the other side, as the specific prototype of FPBAs shown in Figure 3.
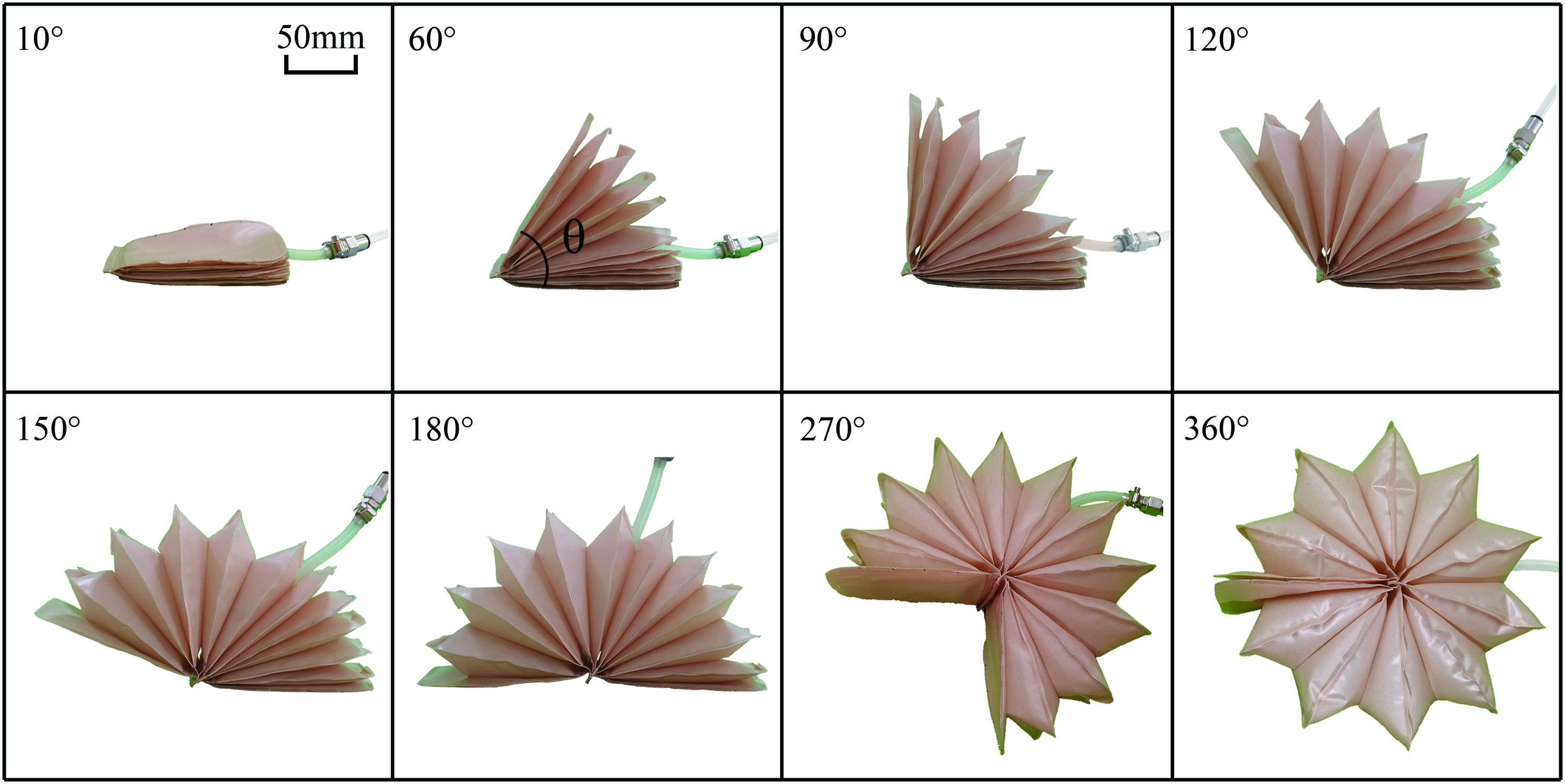
The FPBA prototype at different angles. When the prototype is filled with different volumes of gas, it could expand to any angle θ between 0° and 360°. The prototype's internal pressure equals the atmospheric pressure when it is free from external forces and in equilibrium. FPBAs, foldable pneumatic bending actuators. Color images are available online.
With this kind of geometry, FPBAs can be folded into fan shapes at different angles
As for the materials used to construct FPBAs, we selected the TPU fabric materials due to their advantages, including the affordability, safety, comfort, and good wear resistance. In addition, when the TPU fabric chambers are sealed by the high-frequency welding machine, the maximum tolerable gauge pressure for the fabric and the seam can be above 100 kPa.
Although we only show the prototype with rectangular chambers, with the design method proposed in this article, it is also feasible to make other prototypes by changing their chambers' geometry, number, or the heat-sealing area shapes. For applications, it not only can be configured with existing knee assistive devices but also can be simply integrated into an elastic wrap to form a knee exosuit, as shown in Figure 4A. The knee exosuit can provide assistive torque to human knee joints directly without any other motion transmission mechanism.

The dedicated experiment platform for testing the static and elastic property of FPBA prototypes. The FPBA prototype is mounted between two hinged plates. The angles and internal pressure values of the prototype could be read from the angle scale on the circular rail and the pressure sensor display, respectively. The output torque is obtained by multiplying the reading of the force sensor by the distance (100 mm) between the force sensor and the hinge. Color images are available online.
Generalized mechanical equations
To quantify the mechanics of FPBAs, a closed-form expression for their output torque in terms of the internal pressure and geometrical parameters is derived. Unlike the pneumatic elastomeric actuators that provide torque through the high strain of their extensible air chambers, FPBAs could be considered inextensible because they are made of TPU fabric materials that are nonstretchable, but flexible. Therefore, we can characterize the mechanical properties of FPBAs easily by taking advantage of the virtual work principle. As shown in Figure 5, one side of a specific FPBA is fixed, and the specific FPBA is in an equilibrium state under an external torque T. Obviously, the output torque

An FPBA prototype in equilibrium state at angle θ. T represents the external torque applied to the prototype, and τ represents the output torque of the prototype. Color images are available online.
To establish the relationship between the output torque and internal pressure of FPBAs, we assume that the virtual angle change and volume change of FPBAs in equilibrium are
with
where Pi is the internal absolute pressure of FPBAs and
By substituting Equation (2) into Equation (1), the closed-form expression for torque
where P is the internal gauge pressure of FPBAs.
Because air chambers of FPBAs are inextensible, their volume V can be expressed as a function of the angle
Furthermore, the general closed-form expression for output torque
Obviously, this general equation is suitable for FPBAs in any arbitrary geometry of which the volume can be expressed as a function of the angle
Besides, FPBAs can be used as torque springs when they are filled with a certain amount of gas and have no gas exchange with the outside. Set the initial volume and the internal absolute pressure of FPBAs as
Therefore, the torque/angle relationship for the torque springs is expressed as follows:
By choosing different initial states and volume/angle relationships of FPBAs, we can design various torque springs according to different application requirements.
Design and fabrication of the prototype for FPBAs
Based on the concept of FPBAs, we constructed a physical prototype with rectangular air chambers to validate the mechanical properties of FPBAs derived from the above general equations. The prototype is made from TPU fabric materials commonly used to fabricate the air bags of massage armchairs. Thus, the prototype is very light and weighs only 91.84 g.
The prototype proposed here is essentially the combination of many ventilated air chambers. As shown in Figure 1, the fabrication process for the prototype is simple and only has three steps. First, the TPU fabric materials are hand cut to many rectangular sheets with length and width of 120 and 110 mm, respectively, and holes for the ventilation between adjacent air chambers and the installation of an air tap are created on these sheets. Next, each chamber is constructed by heat sealing the perimeter of the two sheets mentioned above, and an air tap is installed on one of them. After all the single chambers are finished, they are butted together by sealing the shaded parts shown in step 3. All the sealing processes mentioned above are carried out on the high-frequency welding machine (JA-5KW-ZP-01; Jiazhao High Technology Co., Shenzhen, China) commonly used in plastic product factories.
Experimental protocols
To evaluate the mechanical properties and assistant effects of FPBAs, we developed a dedicated experiment platform with a series of pneumatic components and a stainless-steel device for angle and torque measurements. As shown in Figure 4, the stainless-steel device consists of two hinged plates used to install FPBAs, two circular sliding rails with angle scale for angle adjustment of the two plates, a fixed base, a hinge, and a force sensor (DYLF-102; DAYSENSOR, Bengbu, China) with 0.1 N and 2 mV/V of sensitivity. The hinge and the force sensor are both fixed on the base.
One of the plates is attached to the force sensor at zero scale of the sliding rails, while the other can change its orientation along the rails and be fixed at a desired angle. The force sensor is mounted on the base 100 mm away from the hinge center to facilitate easy conversions of force sensor readings to torque values exerted by FPBAs. As for the pneumatic components, there is a pump (TYAP1212; Pumptip, Ningbo, China) for pneumatic supply, a valve that controls the opening and closing of the gas path, and an air pressure sensor (DP-101; Panasonic, Japan) with 0.1 kPa of sensitivity to record the internal gauge pressure of FPBAs.
Two test protocols were implemented on the dedicated experiment platform to evaluate the output torque and elastic property of the prototype.
The output torque protocol
The static output torque for the prototype was measured for variable internal pressures at different fixed angles. In these measurements, the gauge pressures P varied in increments of 2 kPa from 0 to 40 kPa, while the fixed angle
The elastic property protocol
To evaluate the torque elasticity of FPBAs, the prototype with an angle of 180° was first mounted on the platform and filled with different amounts of compressed air to maintain different initial pressures between 0 and 10 kPa in increments of 1 kPa. Then, the valve was turned off to ensure airtightness. The free plate was rotated slowly by manual operation along the sliding rail from 180° to 90° and then returned to 180°. The internal pressure and output torque data of the prototype under each initial pressure were recorded in these processes.
In addition, the FPBA prototype was also embedded into a flexible knee exosuit to verify its assisting effects to knee joints in various human movements, and a male subject (23 years old, height 166 cm, weight 56 kg) was recruited to test the knee exosuit. It should be noted that all the experimental procedures used in this study were approved by the Northwestern Polytechnical University Ethics Committee, and the subject gave written informed consent and provided permission for publication of his photographs for scientific purposes.
As shown in Figure 6, the knee exosuit consists of onboard electronic and sensing systems, off-board pneumatic and control systems, and the knee sleeve attaching the prototype behind the user's knee. The knee sleeve is made of elastic knitted fabrics to ensure fixation and comfort, and Velcro straps are sewn on it to allow the user to adjust its tightness. An air pressure sensor module (BMP180; BOSCH, Germany) is placed in the tube to monitor the internal pressure of the FPBA prototype. The onboard electronic system includes a microcontroller (STC89C52RC; YouXin Electronic, Shenzhen, China) used to process the information from each sensor and transfer the processed data to the off-board microcontroller (STC89C52RC; YouXin Electronic) through NRF24L01 wireless communication modules.

The knee exosuit system and its components.
By analyzing the received data, the off-board microcontroller can control the solenoid valve (4V210-08; CHNY, Shenzhen, China) according to the on/off control algorithm to realize the pressurization and depressurization of the FPBA prototype. The signal processing algorithm used in the onboard and off-board controllers is the classical Kalman filtering algorithm. The sensitivity and time lag for the whole system are 0.1 kPa and 7.5 ms, respectively. Apart from the solenoid valve, the off-board pneumatic system also consists of pneumatic supply sources and tubes. All the components worn on the human body weigh only 298.31 g.
To verify the assisting effect of the knee exosuit, a persistence time testing protocol and a surface electromyography (sEMG) protocol were designed. In these two protocols, all subjects were asked to perform five common static postures in the knee rehabilitation trainings. As shown in Figure 7A–E, the five postures are forward lunge (FL), barbell lunge (BL), half squat (HS), deep squat (DS), and Bulgarian deep squat (BDS). When the knee exosuit assisted the five postures, its internal pressure was preset to 12.1 kPa (FL), 9.3 kPa (BL), 10.6 kPa (HS), 14.8 kPa (DS), and 14.3 kPa (BDS), respectively. All these preset values of pressure were determined based on the survey data in Table 1, the experiment data in Figure 8, and the subjective feedback of the subjects.

Five static postures in knee rehabilitation training, and statistical data on the time spent by five subjects in performing each posture with and without the knee exosuit assistance.

Testing results for the output torque protocol.
To ensure the safety of subjects and the accuracy of each posture, all the tests were performed under the supervision of a professional rehabilitation doctor. It also should be noted that all the experimental procedures used in this study were approved by the Northwestern Polytechnical University Ethics Committee, and the subjects gave written informed consent and provided permission for publication of their photographs for scientific purposes.
The persistence time testing protocol
Five healthy subjects (22 ± 1.26 years old, height 1.65 ± 0.07 m, weight 55.52 ± 6.47 kg) were recruited to perform the five static rehabilitation postures mentioned above with and without the assistance of the knee exosuit, respectively. During this experiment, we record the persistence time the subjects insist on each posture under the two assistance conditions. In total, there are 10 tests for each subject, and each test is done three times to ensure the validity of the testing data. The detailed anthropometric data of the five subjects are shown in Table 2.
Subjects' Detailed Anthropometric Data
The sEMG testing protocol
The sEMG signals of the subject 2's knee extensors are collected when he performs the five rehabilitation postures shown in Figure 7A–E with and without the assistance of knee exosuit, respectively. In total, there are 10 tests for the subject 2 in this protocol. As shown in Figure 9A, three sEMG sensors (8-channel; BioVision, German) with sampling frequency of 100 Hz are placed on the locations of three major knee extensors: rectus femoris (RF), vastus lateralis (VL), and vastus medial (VM), respectively. Also, the reference electrode is placed on the location of patella where there is no skeletal muscle distribution. All the 10 tests in this protocol are conducted twice to ensure the accuracy of the collected sEMG data. After being collected, the raw sEMG signals are first band-passed filtered between 20 and 450 Hz and then filtered out for 50 Hz power frequency interference with an eight-order Butterworth filter.

The sEMG sensor placement and normalized sEMG signals of subject 2.
Results
From Figure 8A, it is observed that the output torque increases with the increasing internal pressures and decreasing angles of the prototype. The output torque of the prototype is up to 25.74 N·m when its internal pressure and fixed angle are 40 kPa and 30°, respectively.
For more intuitive presentation of the relationship between the internal pressures and output torque of the prototype, the test data and their linear fitting lines at several fixed angles are plotted in Figure 8B. It is obvious that the output torque of the FPBA prototype is proportional to its internal pressures at all the fixed angles, and the prototype provides better torque output with decreasing angles. These results are also consistent with that derived from Equation (5). For further explanation, we define a new variable
Therefore, the Equation (5) can be updated as follows:
When the FPBA prototype is mounted at a fixed angle, the
Moreover, all the output torque and internal pressure data in this protocol are linearly fitted at each fixed angle, and the corresponding values for
Therefore, the closed-form expression for the output torque
in which
During the experiment process for the elastic property protocol, it was seen that the prototype could provide torque output through its own compression deformation without any external air input, like a torque spring. All the experimental data are presented in Figure 10. It is observed that the output torque can reach up to 21.80 N·m when the prototype with an internal pressure of 10 kPa is compressed to 90°. The output torque of the prototype increases with increasing compression angles, as shown in Figure 10. In addition, the greater the internal initial pressure, the higher the output torque values at any compression angles, that is, the bending elastic stiffness of the prototype increases with increasing internal initial pressures. It should also be noted that there is always a hysteresis phenomenon when the prototype returns from angles of 90° to 180°, as seen in Figure 10.

Experimental data for the elastic property protocol. The arrows to the upper right indicate the loading processes in which the FPBA prototype is compressed from 180° to 90°. The arrows to the lower left indicate the unloading processes in which the prototype returns to 180° from 90°. Color images are available online.
The hysteresis rates for the FPBA prototype at initial pressures of 0 kPa, 2 kPa, 4 kPa, 6 kPa, and 8 kPa are 36.29%, 16.73%, 14.68%, 12.34%, and 12.76%, respectively. These hysteresis rates are all less than that (∼50%) of the soft pneumatic interference actuators. 38 The hysteresis phenomenon may result from the friction among chambers of the prototype or other unmodeled factors.
The detailed statistical data of the persistence time testing protocol are shown in Table 3. The ratios of the persistence time under the assistance and no assistance conditions for each posture are also listed in Table 3. As seen in Table 3, all the ratios are greater than 1, and the maximum ratio is up to 3.52 when the subject 1 performs the FL posture. This result clearly illustrates that the proposed knee exosuit has obvious assistance effects on the five static knee rehabilitation postures.
The Mean Persistence Time for Five Postures of Each Subject (Unit: s)
BDS, Bulgarian deep squat; BL, barbell lunge; DS, deep squat; FL, forward lunge; HS, half squat.
In addition, the mean and standard deviation of the persistence time data for all subjects are plotted in Figure 7F. From Figure 7F, we can see more intuitively that the knee exosuit is effective for each static rehabilitation posture, especially for the static FL posture.
To show the changing of sEMG signals of subject 2 more intuitively, we further process the filtered data with a sliding window (average) of 800 data points. For comparison, the sEMG signals of muscles VM, VL, and RF from 20 to 30 s in the 10 tests of subject 2 are extracted.
Figure 9B–F depicts the normalized sEMG signals with respect to the maximum signal of VF in each posture under the condition where there is no knee exosuit assistance. We also mark the averaged percentage reduction of each muscle's sEMG signal under the assistance condition to that under the no assistance condition in the upper left corner of Figure 9B–F. With the help of the proposed knee exosuit, all muscle sEMG signals are significantly reduced (the maximum reduction is 64.21%, as marked in Fig. 9D) except for the RF signal in posture DS. As shown in Figure 9E, the sEMG signal for RF with assistance increased by 5.76%, but the increase is very weak and negligible.
In addition, the muscle RF is inherently less active when a human performs the posture DS. In other words, the knee joint does not need much help from the muscle RF in the posture DS under normal state. Therefore, all the results observed in Figure 9B–F verify that the knee exosuit equipped with the FPBAs proposed in this article could provide assistance to the human knee joint in rehabilitation trainings.
Discussion
Applying wearable knee assistive devices is a potential way for prevention and rehabilitative treatment of knee injuries and OA. While existing knee assistive devices have made great progress, such as knee exoskeletons, their widespread applications are still limited by some obstacles, including huge weight, rigidity, control complexity, and high cost. Inspired by accordion bellows, we proposed a novel design of FPBAs to avoid the disadvantages mentioned above and constructed a specific FPBA prototype to verify its suitability for knee assistive devices.
Applicability for knee assistive devices
The most basic requirement for actuators of knee assistive devices is that they can provide appropriate torque to the human knees at any flexion angle. Obviously, the FPBAs investigated in this work can not only meet the above basic requirement but also improve the performance of knee assistive devices.
As shown in Figure 3, FPBAs can be deployed to any angle without any airflow restriction due to their foldable and inflatable properties. Therefore, it is possible for FPBAs to assist human knees in various human movements. Furthermore, by comparing the statistics of persistence time in Figure 7F and the sEMG signals in Figure 9B–F, we conclude that the FPBA prototype could provide enough assistance to the knee joint during rehabilitation trainings.
Moreover, the FPBAs are lightweight (the prototype constructed in this article only weighs 91.84 g) and need no transform mechanism to produce a bending motion, which will greatly reduce the weight of knee assistive devices and further decrease the metabolic burden of users. Besides light weight, flexibility is another competitive attribute of FPBAs. The flexible property allows FPBAs to provide torque in the flexion/extension direction of human knees without producing unwanted loading to other directions, which ensures the safety and comfort of users. Also, FPBAs are low cost and easy to be controlled by the input pressure, and their shape and size can be customized according to the specific needs of users. Therefore, the FPBAs proposed in this article are well suited for application in knee assistive devices.
Advantages as the PBA
Recently, PBAs have attracted a lot of attention of researchers in the soft robotic community, and various PBAs have been designed and evaluated through mechanical experiments.18–19,27,28,36–43 Compared with the existing PBAs, the FPBAs are found to have many advantages.
First and the most outstanding advantage of FPBAs proposed in this article is that they can produce a larger output torque and a wider range of bending angles than other PBAs under the same input pressure conditions. We compared the FPBAs' output torque with five representative PBAs under the same angle and pressure conditions, and the results are illustrated in Table 4. As shown in Table 4, the FPBAs proposed in this article could provide more torque than all the five pneumatic actuators under the same conditions. More specifically, the torques the FPBA prototype provided were 33.8, 4.1, 1.8, 32.0, and 6.73 times that of the origami shell reinforcement actuator, 36 the I cross-section inflatable actuator, 41 the pneumatic interference actuator, 38 the rotary SPA (3 mm wall thickness), 43 and the PBA with replaceable inflation modules, respectively. 37
Comparison of Foldable Pneumatic Bending Actuators' Output Torque with Other Devices
The output torque values for other devices are estimated from curves in the corresponding references.
FPBAs, foldable pneumatic bending actuators; PBA, pneumatic bending actuator; SPA, soft pneumatic actuator.
In addition, as shown in Figure 3, FPBAs could be deformed to any angle between 0° and 360°. Also, when the FPBA prototype is not subject to external force, the deformation angle of it is only related to the internal gas volume. In other words, when the prototype is not subject to external force, a very small pressure can make it bend, and the angle depends on the amount of air inflated. The FPBA prototype could also be maintained at any angles between 0° and 360° when there is no external loading, even if the internal pressure of it equals the atmospheric pressure, which is also a great advantage over other drives, such as the actuators with paper-elastomer composites, 19 the fluidic elastomer actuators for robotic fish, 27 the lost-wax casting actuators for manipulators' grippers, 28 and the pneumatic actuators made of discrete actuation chambers. 18
Second, the generalized mechanical equations for FPBAs and the specific equation for the prototype designed in this study have been established, as presented in Equation (5) and Equation (11). On the one hand, these equations can guide the optimal design of FPBAs to obtain the desired mechanical behavior for FPBA prototypes, and many other potential geometries and mechanics beyond the prototype constructed in this work can also be explored. On the other hand, as mathematic models of FPBAs, these equations can help to simplify the automatic control process for FPBAs and improve the control accuracy.
Finally, the advantages of low cost and easy fabrication will improve the possibility of widespread application for FPBAs. FPBAs are made of TPU fabric materials, which are commonly used to make the air bags of various massage equipment, such as the massage chairs and the eye massage instrument. These materials are extremely cheap, just as the cost for the FPBA prototype constructed in this work is less than one dollar. As shown in Figure 1, the fabrication process for FPBAs is very simple and only consists of three steps: cutting, welding the sheets, and welding the chambers. In addition, the only specialized equipment used in the fabrication process is the high-frequency welding machine, which is commonly used in plastic product factories.
Wide application
Although FPBAs are originally designed for knee assistive devices, such as the knee exosuit constructed in this article, they also can be applied to other robotic fields due to their changeable geometry and size. For example, FPBAs can be assembled to various wearable robots to assist the human shoulders, elbows, ankles, knuckles, and other joints. Beside wearable robotic areas, they can also be applied to industrial robots, such as flexible manipulators and grippers. This is a promising area for future application research.
Limitations and future work
The pneumatic supply resource is the main determinant for the dynamic performance of pneumatic actuators. In this study, we only investigated the quasistatic mechanical performance of FPBAs by using a miniature pump. In future work, we will further explore innovative pneumatic supply sources, such as a passive pump mounted on shoes, a high-pressure air bottle, and a high-power compressor.
In addition, the user testing scheme for the knee exosuit designed in this article needs to be further improved. Also, the advanced human intention recognition techniques will be integrated into the knee exosuit system in future studies, such as the biomechanical information recognition and the surface electromyography recognition techniques.
Conclusion
In this study, we present the novel design and evaluation of FPBAs that could actuate knee assistive devices to enhance human knee joints during rehabilitation trainings. FPBAs are composed of interconnected air chambers made of TPU fabric materials with the inspiration of accordion bellows, and they provide torque output by the inflation or mutual compression of their air chambers. The mechanical performance and the feasibility of FPBAs to assist human knee joints were analyzed through the virtual work theory and subjects' wearing experiments. FPBAs could generate bending motions with no airflow restrictions at any angle and could provide human-scale torque at low input pressure, which enabled FPBAs to assist knee joints more safely in various human movements.
Also, the specific relationship among the output torque, internal pressure, and geometry of FPBAs may simplify the automatic control of knee assistive devices. Finally, FPBAs have promising potential to be applied in wearable or other soft robotics due to their competitive advantages, such as low cost, simple manufacturing, flexibility, and comfort. In the future, we will further address the limitations in this study and explore potential applications for FPBAs in other robotic fields.
Footnotes
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This research was supported by the National Natural Science Foundation of China (Grant Nos. 61603304 and 11572248) and the Qingdao Innovation Program (Grant No. 18-2-2-14-jch).