
Abstract
Soft actuators using pressurized air are being widely used due to their inherent compliance, conformability, and customizability. These actuators are powered and controlled by pneumatic supply systems (PSSs) consisting of components such as compressors, valves, tubing, and reservoirs. Regardless of the choice of actuator, the PSS critically affects overall performance of soft robots because it governs the soft actuator pressure dynamics, and thereby, the general dynamic behavior. While selecting and controlling PSS components for meeting desired soft actuator performance, specifications such as PSS mass, volume, and duration of operation must also be considered. Currently, there is no comprehensive study on PSS optimization for meeting dynamic performance and PSS specifications, due to limited understanding of soft actuator pressure dynamics, large solution space for PSSs, and variability in soft actuators. By considering critical parameters of PSS and soft actuators, we introduce and demonstrate PSS parameter optimization. We propose a normalized model for soft actuator pressure dynamics and quantify the relationship between PSS parameters, soft actuator design parameters, and dynamic performance metrics of rise time, fall time, and actuation frequency. After experimental validation, we applied these results and optimally select and control PSS components to meet desired soft actuator performance for a soft exosuit, while minimizing mass of selected components. The measured pressure response with this prototype agrees well with simulations, with root mean square errors <5.2%. This work is a step toward furthering the scope of soft robotics, as it enables PSS modeling and optimization, for meeting the desired soft actuator performance while also addressing PSS specifications.
Introduction
Soft robotics1,2 provides customizable solutions to a range of applications such as wearable devices,3–9 mobile robots,10–14 and grippers2,15,16 due to unique characteristics such as compliance, conformability, and versatility. A significant number of soft robots generate motion through soft pneumatic actuators (SPAs) (Fig. 1B) powered by pneumatic supply systems (PSSs).4–13,17–21 PSSs (Fig. 1A) typically consist of three main components: source for generating pressurized air, pneumatic line for connection, and valves for controlling flow direction. 22 By virtue of the pneumatic flow, PSSs govern the soft actuator pressure dynamics, and thus the overall soft robot dynamic behavior.1,2,22 To meet dynamic performance specifications such as rise time, fall time, or actuation frequency, PSSs have to be tailored, that is, the PSS components and their control parameters such as source pressure, valve duty cycle, and compressor duty cycle must be selected carefully. Regardless of the soft actuator used, improper selection or control of PSS components can lead to either too slow or too fast dynamic response, or can even damage the soft actuator.

A PSS powering SPAs.
Accordingly, researchers have studied some aspects of PSSs for soft robotic applications. Wehner et al.
22
compared portability and relative merits and demerits of different choices for the pneumatic source such as battery-powered compressors, liquid
Although there are numerous studies on soft actuator kinematics, deformation and force interactions using analytical modeling,14,24–26 rigid-kinematic approximations,27–29 or FEA,30,31 soft actuator pressure dynamics are relatively less explored. The major reasons limiting study of soft actuator pressure dynamics are (i) nonlinear nature of pneumatic flow, (ii) large variability in PSSs with respect to components and their control parameters, (iii) nonlinear nature of soft actuator behavior due to material properties, design geometry, and large deformations, and (iv) large variability in soft actuator design with respect to design, materials, and operating pressures.1,32 As a result, soft actuator dynamic response is most commonly modeled by fitting the experimentally measured response to first or second order linear systems.6,12–14,29,33,34 Such models do not relay information about the underlying flow mechanics, and are insufficient for customizing PSSs to meet performance requirements. In addition to performance, applications often dictate specifications on the PSS in terms of its mass, volume, tubing length, and duration of operation; and a trade-off has to be made in PSS design, as improved dynamic performance necessitates a bulkier PSS as shown in Figure 1C. 22 Currently there is no systematic method for PSS component selection and control to simultaneously meet specifications of dynamic performance and the PSS.
By studying the effect of critical parameters of PSSs and soft actuators on dynamic performance, here, we introduce parameter optimization. Based on ideal gas laws and the ISO 6358 standards,35,36 we propose a comprehensive model for pressure and flow dynamics of soft actuators. This normalized nonlinear model is applicable to a wide range of PSSs with respect to source, valve, and pneumatic line, as well as to soft actuators with varying sizes, operating pressures, and amount of deformation. After validating the results experimentally, we apply them to the design and testing of a portable PSS for a wearable robot, which meets desired dynamic performance while minimizing mass of selected components. In addition to improving the understanding of soft actuator pressure dynamics, this study enables optimal design through selection and control of PSS components to simultaneously address specifications of PSS and soft actuator performance. The main contributions of this study are
a comprehensive model for soft actuator pressure dynamics,
investigation of the impact of PSS parameters and soft actuator design parameters on actuators' dynamic performance, and
validation of PSS parameter optimization through novel soft exosuit prototype design and testing.
Proposed Approach for PSS Parameter Optimization
The source of the PSS generates the air pressure, which drives the flow through the valve and pneumatic line to the soft actuator. Based on the pressure generation mechanism, PSSs in academia and industry can be largely categorized into two configurations as shown in Figure 2.

For the flow propagation through the PSS, we use the ISO 6358 standard model,35,36 which is applicable to a diverse range of commercially available components for the valves and pneumatic line. After deriving the governing equations of pressure and flow dynamics, we identify critical parameters of these PSS components affecting pneumatic flow, and classify them into two types as follows:
Next, we identify the soft actuator design parameters affecting its pressure dynamics, and denote them as
Considered Parameters of Soft Pneumatic Actuator and Pneumatic Supply System
Only applicable for configuration B.
PSS, pneumatic supply system.
Lastly, we categorize design requirements as:
For optimizing PSSs, the relationship between PSS parameters, soft actuator design parameters, and the mentioned specifications must be quantified. In the subsequent sections, we derive the model for soft actuator pressure dynamics, and simulate its pressure response while varying
Modeling Pressure and Flow Dynamics
To study pressure dynamics of soft actuators systematically, we use existing established models for air flow through PSS.36,38–42 In addition, we propose a new quasi-static pressure–volume relationship for modeling soft actuator expansion. The commonly used assumptions in pneumatic studies36,38–42 are as follows: (i) there is no air leakage; (ii) air follows ideal gas equations; (iii) the ambient is at standard pressure and temperature, P0 = 0.1 MPaA,
Modeling pressure dynamics of PSSs
As described in Figure 2, we classify PSSs into two types based on the source used. For constant pressure PSSs (Fig. 2A), we have
For constant flow PSSs (Fig. 2B),
where
During soft actuator inflation and deflation, air flows through the valve, tubing, and fittings. We model this flow using ISO 6358 standard,35,36 which calculates the flow through a component using the upstream and downstream pressures, and two parameters, sonic conductance C and critical ratio b, (
where
This model, an approximation of flow through an orifice, is applicable to a wide range of commercial components and has been used previously in PSSs with positive pressure36,42–45 as well as vacuum.46–48
To model the combined effect of tubing, fitting, and valves, we calculate the equivalent
Modeling soft actuator pressure dynamics
We model the soft actuator as a chamber with variable internal volume,
where
where we define the expansion ratio,
The soft actuator pressure dynamics, while implicitly considering internal volume dynamics, are then described by
Normalization
We normalize soft actuator and PSS pressure dynamics with soft actuator internal volume and the equivalent sonic conductance. We first define normalized sonic conductance as
For constant flow PSSs, we additionally define normalized reservoir volume,
Next, we normalize soft actuator pressure dynamics by
where
For constant pressure PSSs,
And for constant flow PSSs, the normalized source pressure dynamics are given by
Using the above, the normalized soft actuator pressure dynamics are given by Equations (3), (4), and (10)–(13). For constant pressure PSSs, the normalized dynamics depend on
Generating Mapping from PSS Parameters and Soft Actuator Properties to Dynamic Performance
In this study, we simulate the normalized soft actuator pressure dynamics and use the predicted pressure response to quantify the relationship between dynamic performance and the parameters f, c, and
We first quantify soft actuator dynamic performance using the following metrics:
where
Methods
1.
a. Source pressure,
b. Expansion ratio,
c. Critical ratio,
For constant flow PSSs, we further carried out simulations for
d. normalized compressor flow,
e. normalized reservoir volume,
By linear interpolation of the pressure response data, we calculated
Results
Fall time, 
a.
b.
Rise time, Rise time, 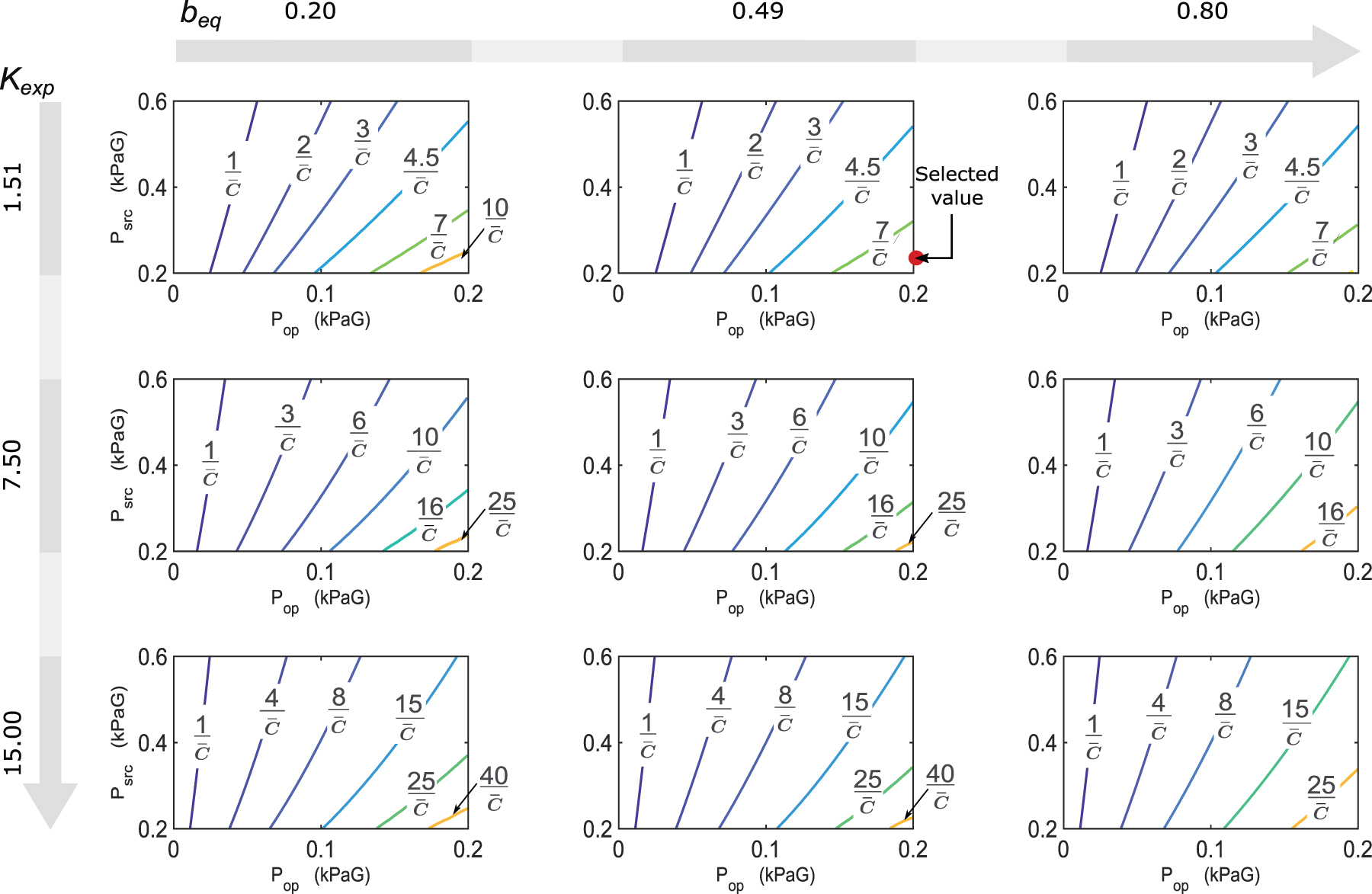
Soft actuator pressure and normalized volume before inflation are P0 and 1, respectively. After inflation, they become
As the average
a.
From Equation (15) and Figures 3 and 4, we see that
At any frequency higher than that in Equation (15), the amplitude of pressure oscillation will reduce. In addition, at
b.
Soft actuator pressure and normalized volume before inflation are P0 and 1, respectively. After inflation, they increase to
Rearranging,
If the system reaches steady state, Equation (18) predicts the sustainable
To achieve this
where
If the normalized conductance,
For both types of PSSs, the air consumed per actuation cycle in standard L is given in Supplementary Data S4:
Validation
To validate the results from this parameter study, we powered a single pneunet actuator
23
with a pressure-regulated PSS (Fig. 2A), and compared the rise time, fall time,
Actuator volume,
Operating pressure,
Expansion ratio,
Normalized conductance and critical ratio,
Source pressure,
Figure 6B, C shows the pressure response and Supplementary Table S1 shows the root mean squared (RMS) and peak errors between experiments and the model. In addition, Supplementary Table S2 compares the predicted versus achieved fall time, rise time, and maximum actuation frequencies. We see that the model closely captures the behavior of the pneunet with <5.2% RMS error for all conditions. We also see that with higher source pressures, the measured inflation response is faster than that predicted by the model. This is because the inertia of the soft actuator limits the peak displacement at high actuation speeds, which leads to a smaller actuation volume and faster response.

Validation of results from PSS parameter study by testing the inflation and deflation response with a pneunet actuator.
Implementation to PSS Design
We implement the results from the previous section to select PSS components for an entirely portable soft exosuit through parameter optimization. The prototyped PSS was aimed to meet both dynamic performance and PSS specifications.
Design requirements
We have prototyped a soft exosuit as shown in Figure 8A for studying force interactions with the human torso. This exosuit consists of six soft actuators, called SPA-packs 17 (Fig. 9A), capable of producing forces up to 40 N each. We calculated the dynamic performance requirements of this exosuit for an application to support the wearer's weight in awkward work postures, based on,50–54 and a pilot study. These requirements must be met by a portable PSS, which should be compact and lightweight. Table 2 summarizes these performance requirements and PSS specifications.
Design Requirements and Corresponding Achieved Values of the Fabricated Pneumatic Supply System
Specifications for a single SPA-pack.
From valve to SPA-pack.
SPA, soft pneumatic actuator.
Parameter optimization and component selection
Using our mapping results, we calculated the range of PSS parameters f and c that meet performance requirements given in Table 2. Using these values, we compared commercially available options for source, valve, and pneumatic lines to find the optimal set of PSS components as described hereunder:
1. For tubing length 0.5 m (between valve and SPA-pack), we compared options for standard pneumatic tubing with internal diameters of 1.2, 2.5, 4, and 5 mm. Using Equation (S10), we calculated C and b for each, as well as
2. For
3. Next, we compared available valves and fittings, and noted the combinations of valve, tubing, and fittings with
4. From the desired number of full actuations, we calculated the total amount of air required as 897 standard L by applying Equation (20). Using this and acceptable range of
a. Pressure regulated: We compared acceptable options among high-pressure cylinders and liquid
b. Compressor based: We compared acceptable compressors and battery combinations that could provide
5. For every combination of PSS components that could meet performance requirements, we calculated the total PSS volume and mass. We selected the combination with minimum mass of components, as listed in Supplementary Table S3. It consists of a battery-powered compressor, two reservoirs, standard tubing and fittings, and six sets of proportional valves with custom manifolds.
6. For the selected components, we used Equations (18) and (19) to calculate optimal DC and DV.
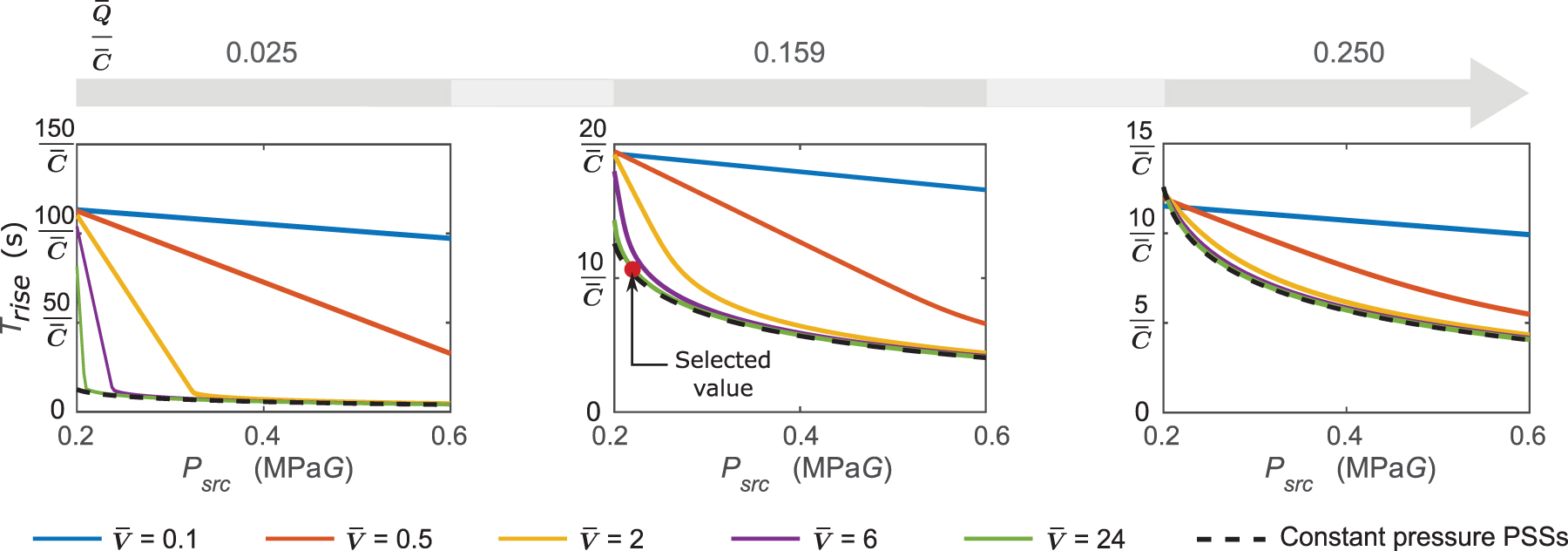
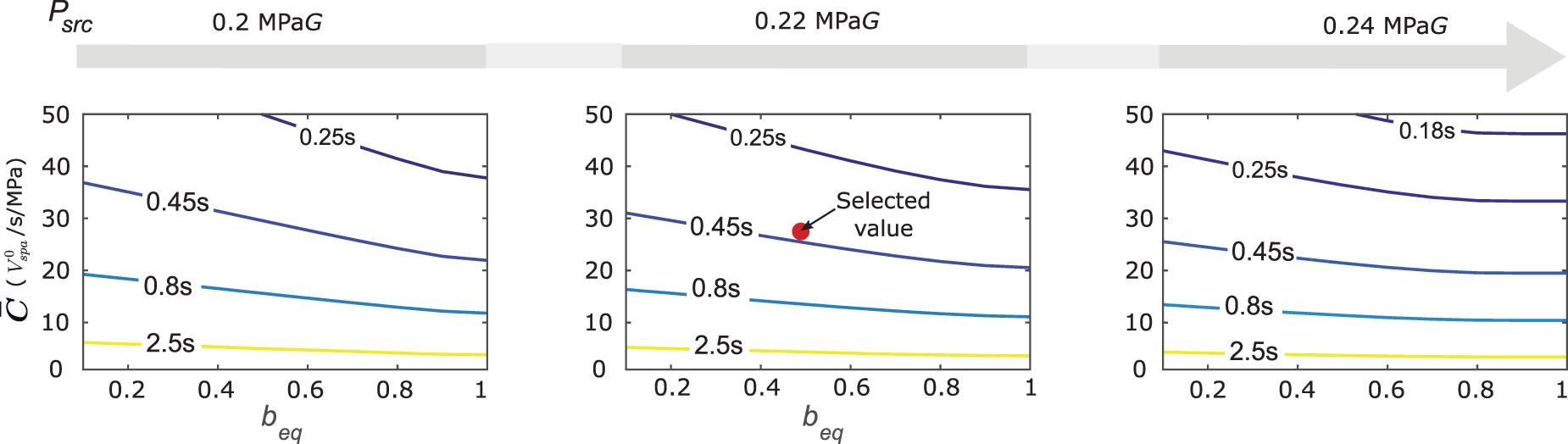
With the optimally selected components, we prototyped and assembled the PSS in the form of a backpack as shown in Figure 8B. The total mass of the selected PSS components is 1.95 kg, and their optimal flow and control parameters are as listed in Figure 8D, and highlighted in Figures 3–5, 7, and 8E.
Predicted rise time for the SPA-pack with expansion ratio,

PSS design through parameter optimization
Comparison with experimental testing
We tested the prototype while powering a single SPA-pack (Fig. 9A) in two conditions, unloaded and blocked. For both cases, we measured the pressure response 10 times on a bench top. To compare the observed dynamic behavior with that predicted by our model, we simulated the SPA-pack response in these conditions. For simulating blocked conditions, we took the expansion ratio,

Validation of PSS parameter optimization through off-board testing of the SPA-pack dynamic performance.
From Figure 9B, we observe that the PSS meets desired performance requirements of
Comparison of Measured Pressure Response of the Soft Pneumatic Actuator-Pack with Simulations
RMS, root mean squared.
Conclusion
In this study, we presented parameter optimization for design and control of PSSs. This is the first comprehensive study and validation of addressing the requirements of both soft actuator dynamic performance and PSS specifications. The model for soft actuator pressure dynamics proposed in this study goes beyond the scope of currently used fitted models as it captures the effects of the PSS components and soft actuator design parameters. Furthermore, it complements existing studies of soft actuator kinematics and deformation, and can be employed to study and dynamically control soft robot motion and forces. Using this model, we investigated and quantified the effect of 10 parameters on soft actuator dynamic performance. In addition, we identified physical limits of achievable dynamic performance for a given set of parameters. This mapping creates an improved understanding of the role of source, valve, pneumatic line, and soft actuator design parameters on dynamic performance. Experimental testing with a pneunet actuator showed high fidelity with the model, thus validating its accuracy and applicability to soft actuator pressure dynamics. Using results from the parameter study, we designed a PSS for powering an exosuit with six soft actuators, while minimizing mass of PSS components. Results from experimental testing with this device also show good agreement with simulations, thereby affirming the proposed approach. By enabling optimized PSSs for robotic applications, this study is a step toward customizing soft robotic systems and will help to broaden the scope of soft robots.
Footnotes
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.