
Abstract
Liquid–vapor phase change materials (PCMs), capable of significant volume change, are emerging as attractive actuating components in forming advanced soft composites for robotic applications. However, the novel and functional design of these PCM composites is significantly limited due to the lacking of the fundamental understanding of the mechanical properties, which further inhibits the broad applications of PCM based materials in the engineering structures requiring large deformation and high loading capacity. In this study we fabricate PCM-elastomer composites exhibiting large deformation and high output stress. Thermomechanical properties of these composites are experimentally and theoretically investigated, demonstrating enhanced deformation and loading capacity due to the induced vapor pressure. By controlling the distribution and content of the PCM inclusions, structures with tunable deformability under a relatively small strain in comparison with traditional soft materials are fabricated. Accompanying with the asymmetrical friction and deformation, complex locomotion and adaptable grabbing function are achieved with excellent performance.
Introduction
Smart soft materials owning elegant properties of simple operation, programmability, fast response, and tunable stiffness have wide applications in soft actuators, robots, artificial muscles, and so on.1–5 Specific properties of these smart materials and ingenious design strategies endow the soft actuators with various functions and excellent performance.6–12 For example, tendons made of shape memory alloys/polymers have become an important part in adapting robots due to the good shape programmability. 7 Cylindrical microrobots fabricated by photoactive liquid–crystal elastomers have the biomimetic motion under the actuation of structured monochromatic light. 10
Compared with other smart soft materials, thermos-pneumatic actuation using liquid–vapor phase change in phase change materials (PCMs) has the advantages of simple fabrication, easy operation, lightweight, durability, large deformation, and high loading force13–22 and has been utilized in various fields, such as valves in microfluidics, 13 triggers for standing scales, 14 and soft robots with locomotion and grabbing functions.15,20 The volume change of capsuled liquid from liquid to vapor in chambers has been studied through the saturated vapor pressure,14,16 revealing the capacity of large deformation. Nonetheless, the simple chamber design faces a huge risk of chamber damage, which limits the further applications. 16
Phase change composites, embedding the PCMs into silicone rubber, combining the elastic properties of the rubber matrix, and extreme volume change accompanying liquid–vapor transition, decrease the risk of structural failure by reducing the chambers into uniformly distributed inclusions and have been applied in soft actuators.17,18 Although the liquid–vapor phase transition in chambers has been discussed, the thermomechanical properties of these PCM-elastomer composites are rarely studied. Insufficient fundamental understanding of the thermomechanical properties of PCM-elastomer composites leads to limited usage of these soft composites merely as a complementary part to the design of soft actuators and advanced engineering structures.17,18
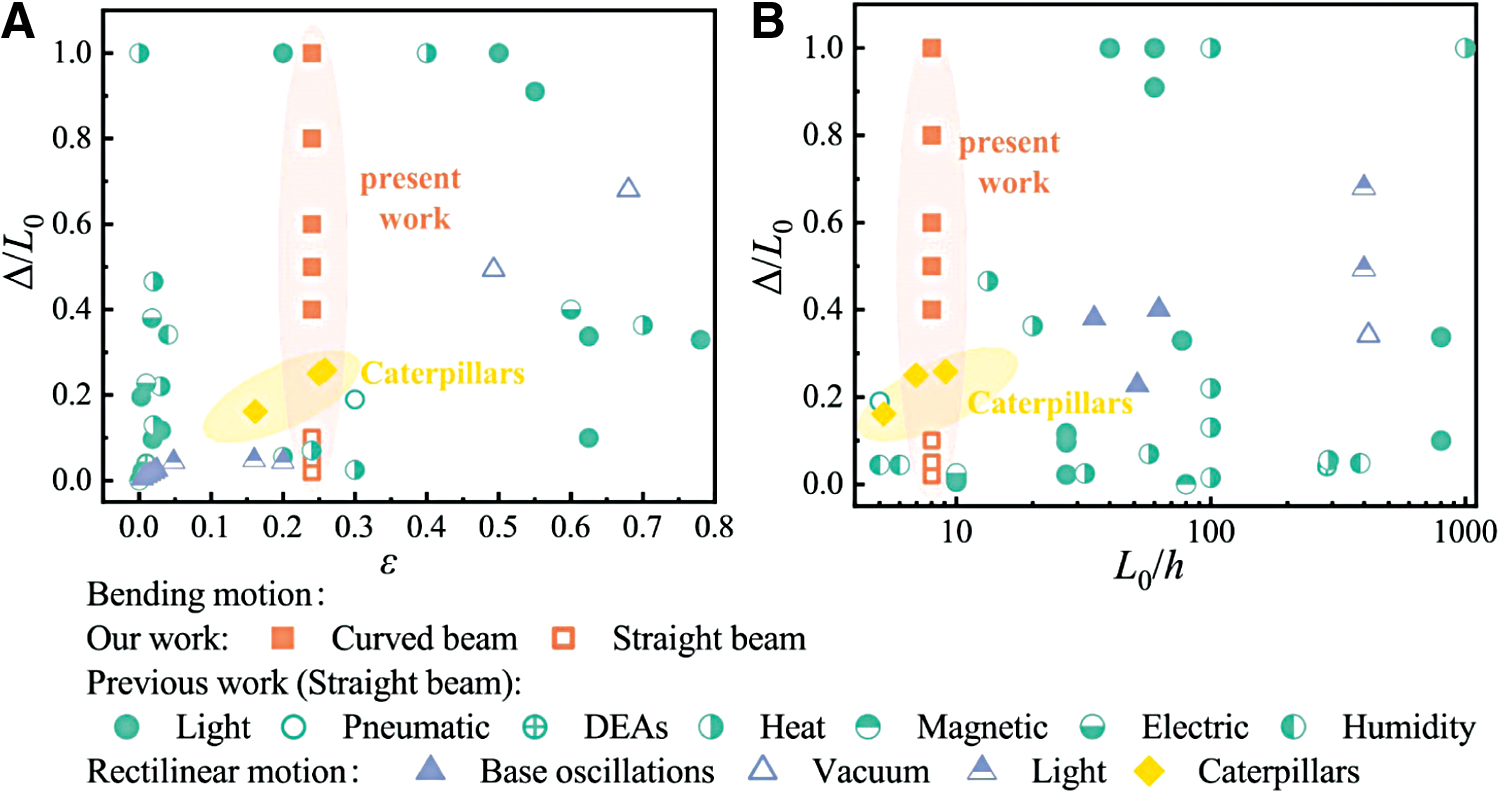
In this work, the thermomechanical properties of PCM-elastomer composites with liquid inclusions undergoing liquid–vapor phase transition are first investigated through the micromechanical method and verified by experimental studies. It is shown that the vapor pressure induced by the liquid–vapor transition in the inclusions could lead to enhanced thermal expansion and output stress without significant change of the material rigidity. By controlling the distribution and amount of PCM inclusions, increased deformability with wide tunability is achieved in curved beam structure. Actuating the folding of stiff sheets at the joints due to the high output stress, the PCM-elastomer composites serve as the actuators in designed deformable structures. Comparing previous structure designs with the performance reported here highlights the wide tunability in deformability at a relatively small strain. Through the assembly of deformable units, functional structures are fabricated with adjustable performance, such as adaptable grippers. Moreover, asymmetrical friction boundaries are introduced to achieve the locomotion of these deformable structures, such as unidirectional motion with carrying ability. Asymmetrical deformation of assembly structures is also realized to complete more complex motion such as turning.
Results and Discussion
Thermomechanical properties of PCM-elastomer composites
The PCM-elastomer composite is fabricated at room temperature and consists of liquid ethanol inclusions embedded in the silicon rubber matrix Ecoflex 00-35 (Smooth-On, Inc.). Programmable distribution of inclusions in the PCM-elastomer composite is easily achieved through 3D printing. 23 Upon heating the evaporation of the liquid ethanol leads to increasing pressure inside the inclusions and forces the inclusions to expand. Meanwhile, the rubber matrix expands due to the thermal expansion. As a consequence, we could observe an expansion of the soft composite with increasing temperature (Fig. 1A).
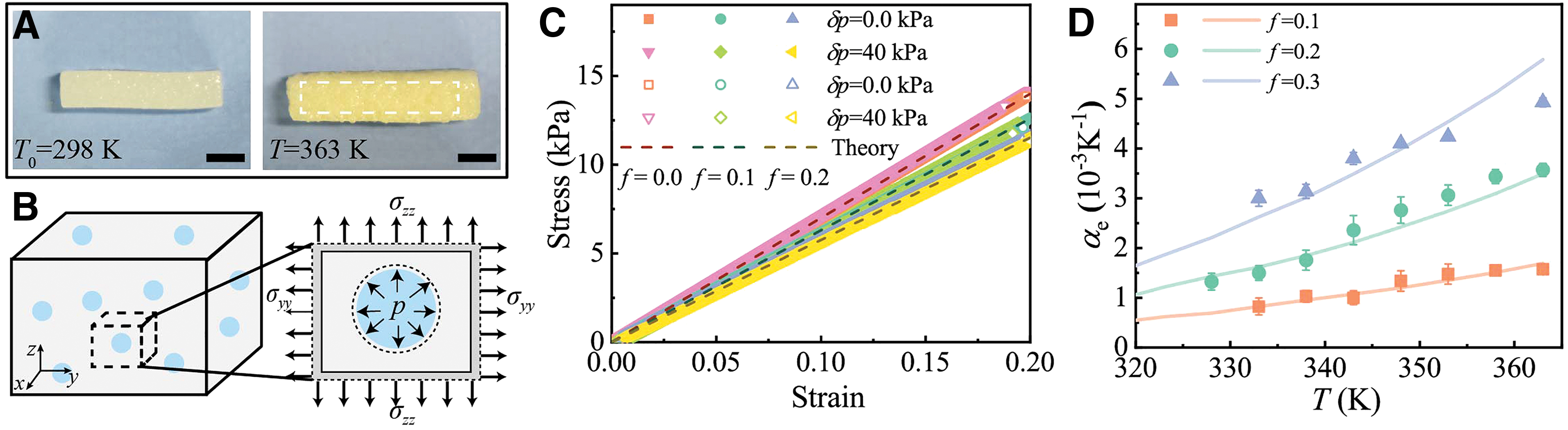
Thermomechanical properties of PCM-elastomer (ethanol-silicone here) composites.
To quantitatively predict the thermomechanical behaviors of the soft composites due to liquid–vapor transition and thermal expansion, we build a micromechanics model, assuming that the ethanol inclusions in the composites are spherical and identical with uniform spatial distribution, and the silicon rubber matrix behaves within the bounds of linear elasticity. The process of liquid–vapor transition in the inclusions is described by the saturated vapor pressure (p(T)).
24
As ethanol in the inclusions has negligible moduli,
25
the soft composite can be treated as a porous material with internal pressure δp = p(T)–p(T0) applied on the voids. Based on the classical micromechanical method,
26
we obtain the effective Young's modulus Ee of the soft composite (see details in Supplementary Data)
where f is the volume fraction of ethanol inclusions at the reference state (T = T0 in Fig. 1A). κ = 423 kPa, μ = 21.6 kPa
27
, and E = 9κμ/(3κ+μ) denote the bulk, the shear, and the Young's modulus of the elastomer matrix, respectively. As an intrinsic property measuring the resistance of the porous matrix to being deformed elastically, the effective Young's modulus of the PCM-elastomer composite above boiling temperature of ethanol is irrelative to δp, consistent with our measurement in the desired experimental strain range (Fig. 1C).
28
The effective coefficient of thermal expansion (CTE)
and satisfies the modified Levin's formula with the presence of the internal pressure δp
Equation (2b) relates the effective bulk moduli
Supplementary Figure S1B shows that the liquid–gas transition of ethanol inclusions significantly enhances the thermal expansion of the soft composite in the presence of δp. Controlling the variance of pressure to temperature (δp/ΔT) based on Equation (2), CTE of the soft composite is programmable and can be tuned to be zero at a critical value (δp/ΔT)c = −12(1 − f)κμα/[f(3κ+4μ)] or even negative at δp/ΔT < (δp/ΔT)c. Besides, the induced output stress of the soft composite is 3κeαeΔT = 3καΔT +[ f(3κ + 4μ)/(3fκ + 4μ)](δp − 3καΔT), with [f(3κ + 4μ)/(3fκ + 4μ)](δp − 3καΔT) as the contribution of vapor pressure. By adjusting δp/ΔT, stress induced by vapor pressure can be designed to meet the carrying needs for the soft composites. The theoretical analysis well predicts the thermomechanical behaviors for the PCM-elastomer composites, and the estimated properties serve as fundamental implements in the finite element analysis on the deformation and locomotion of more complex structures with PCMs as shown in the following parts.
Bending of straight bilayer structures with PCM-elastomer composites
The ethanol-silicone composites with a relatively high effective CTE αe can be utilized as thermally active structural components to trigger desired motion. Here we fabricate straight bilayer structures consisting of an active layer [ethanol-silicone elastomer composite with CTE α2 = αe in Eq. (2)] and a pure silicone elastomer (Ecoflex 00-30 or PDMS) with a relatively low CTE α1 as the passive layer (Fig. 2A). The Young's modulus, thickness, and CTE of the passive and active layers are denoted by Ek, hk, and αk (k = 1, 2), respectively. Subscripts 1 and 2 are used to identify quantities pertaining to the passive and active layers, respectively. In experiments, the bilayer structure has a width of 5 mm and length of 20 mm. Upon heating the active layer of a larger CTE than the passive layer is subjected to compression from the passive layer, and the whole structure bends toward the active layer; upon cooling the bilayer structure recovers to the straight configuration (Fig. 2A). The radius of curvature R at the interface of the bending bilayer structure is given by 32
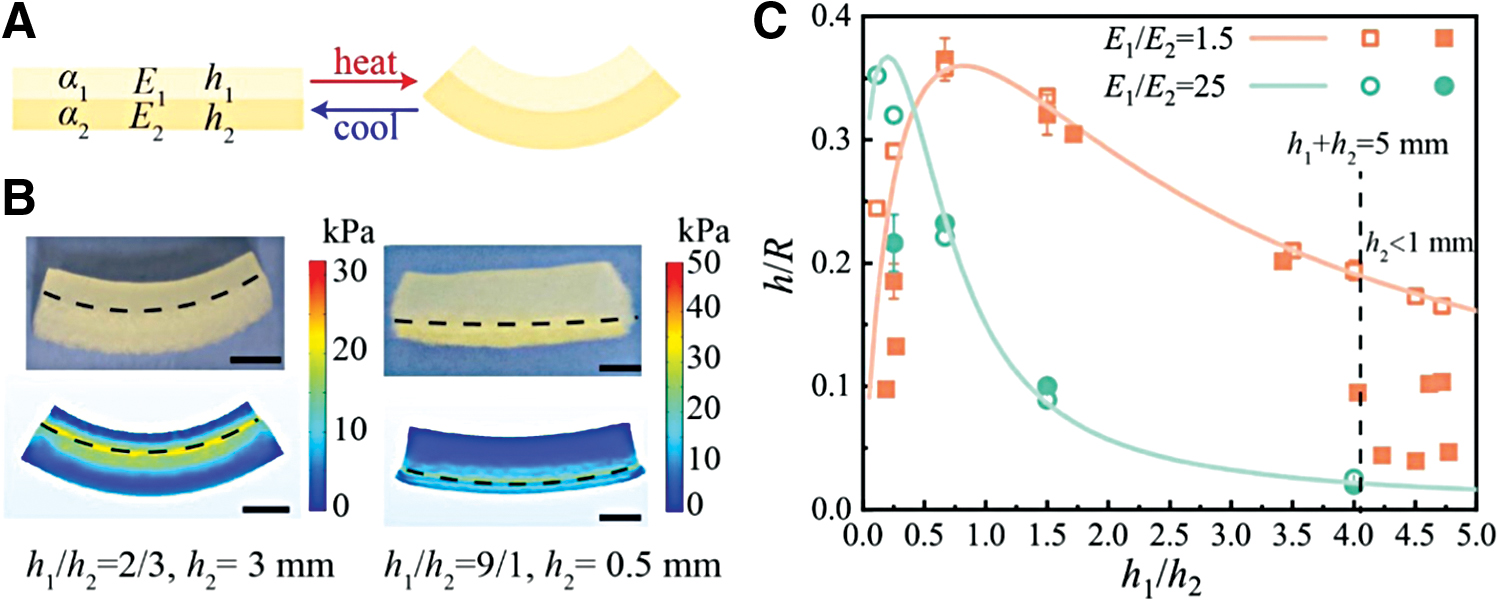
Bending of temperature-response bilayer structures with phase change materials.
where h ( = h1 + h2) is the thickness of the bilayer structure, m = h1/h2, n = E1/E2, and
As shown in Figure 2B and C, the theoretical analysis and numerical simulations on the bending deformation agree well with experimental results for a thick active layer (h2 > 1 mm), but significantly overestimate the bending deformation at small h2 (h2 < 1 mm), given a total thickness h1 + h2 = 5 mm. The discrepancy at small h2 is owing to the nonuniform distribution of the ethanol inclusions in the matrix and the decreased volume fraction f due to the partial collapse of the inclusions. Thickness larger than inclusion size (0.5 mm) is necessary for a designed performance of vapor pressure in PCM-elastomer matrix composites. In comparison with PDMS (E1/E2 = 25), the bilayer structure with Ecoflex 00-30 as the passive layer (E1/E2 = 1.5) at intermediate and relatively large h1/h2 can be actuated with larger deformation (or equivalently larger h/R in Fig. 2C). Therefore, we use Ecoflex 00-30 as the passive layer in fabricating the bilayer actuators below.
As demonstrated in Figure 2B, the bending deformation, as well as relative displacement between two ends of the initially straight structures, is relatively small. To achieve more powerful soft functioning, we propose two new design strategies, curved bilayer structures and self-folding structures, which enable the soft structures to maintain and deliver large deformation for functional use of soft actuators and robots. In the following discussion, the width w for all fabricated soft structures is 10 mm, and the volume fraction of ethanol inclusions in the ethanol-silicone elastomer composite layer is f = 0.2.
The ethanol could run out upon repeated heating due to the nanoporous structure of the silicon rubber matrix. Previous work in literature demonstrates that the rejuvenation of ethanol in the phase change composites could be achieved by immersing the composites into the ethanol solution. After restoring the ethanol in the PCM-elastomer composites, the retention of the original functionality of the composites could be observed. 18 PCM-elastomer composites in this work are reusable unless unexpected heat damage occurs due to repeated heating, and all designed soft robotics here can be actuated repeatedly using this repeatable rejuvenation method.
Design and characterization of soft curved bilayer structures
Similar to the straight bilayer structure discussed above, the curved bilayer structure also consists of a passive layer (pure silicone elastomer) and an active layer (ethanol-silicone elastomer composite). As shown in Figure 3A and Supplementary Figure S3A, the soft curved bilayer structure has an initial radius R0 and an open angle 2θ0 (2θ0 < π). Upon heating the curved structure bends with the open angle changing from 2θ0 to 2θf and the radius of curvature changing from R0 to Rf. The initial distance between two ends of the curved structure changes from L0 in the initial configuration to L0 − Δ after deformation, where Δ denotes the end distance change (Fig. 3A).
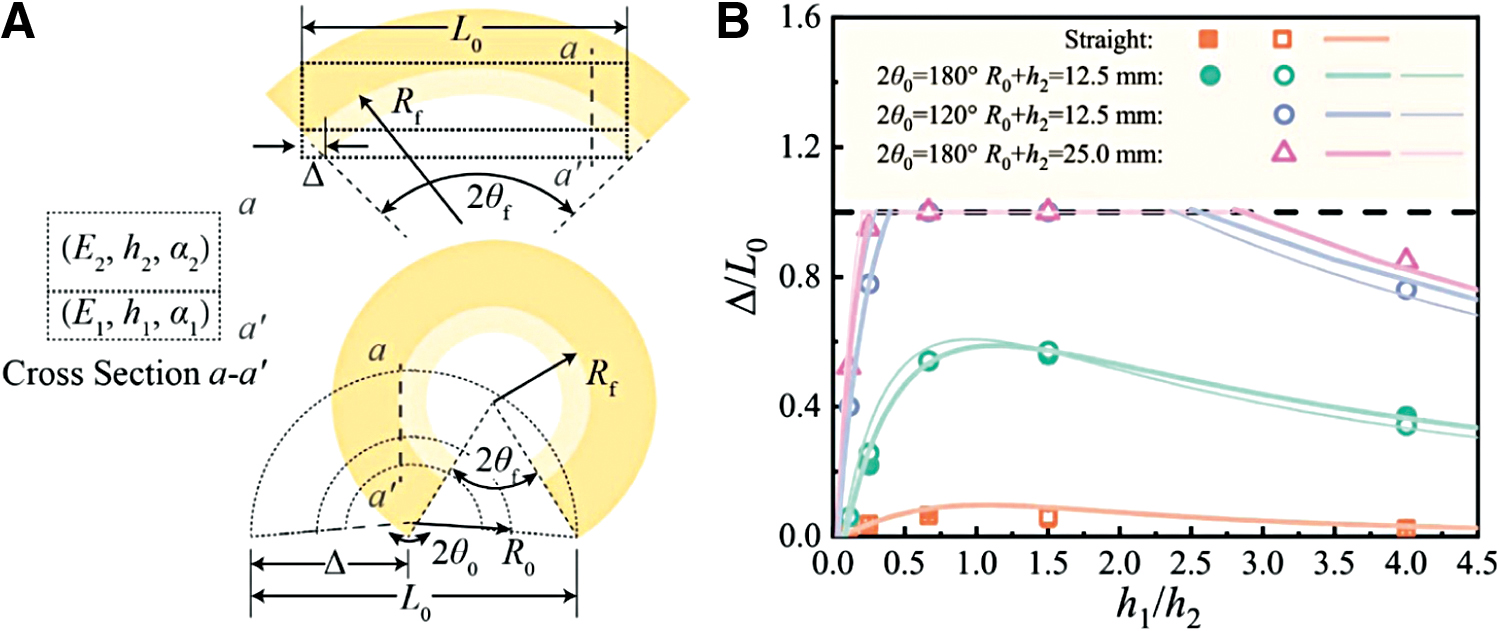
Deformation of curved bilayer structures.
The structure deformation can be estimated using the Euler–Bernoulli beam theory or linear elasticity formulation (see details in Supplementary Data). In general, the Euler–Bernoulli beam theory is more appropriate for a thin beam structure, while the linear elasticity formulation is not limited to a thin beam. As shown in Supplementary Figure S3B and C, the theoretical prediction based on the Euler–Bernoulli beam theory exhibits very small difference with that based on the linear elasticity formulation when the initial radius of the curved structure is significantly larger than its thickness (R0/h > 5). In other cases, linear elasticity formulation is preferred for its good accuracy. Since there is no penetration allowed between the two ends of the curved beam, the open angle of deformed beam is required to meet θf ≥ 0. According to Equation (S15b) in Supplementary Data, the initial open angle falls in a range of
with Δρ given by Equation (S14b) in Supplementary Data.
The relative displacement Δ/L0 based on geometrical relationship can be determined as
with Rf and θf given by Euler–Bernoulli beam theory through Equation (S15) or by linear elasticity formulation through Equation (S21) in Supplementary Data. The thickness of the bilayer structure is h = h1 + h2 = 5 mm. The initial distance between two ends of the straight bilayer structure is L0. When the passive layer contacts with the substrate, the relative displacement Δ/L0 is expressed as
with Rf = R given in Equation (3) and θf = L0/(2Rf). Here the strain associated with thermal expansion are
Summary of relative deformation of soft structures. Δ/L0 versus
Design of inchworm robot and its locomotion under controlled heating
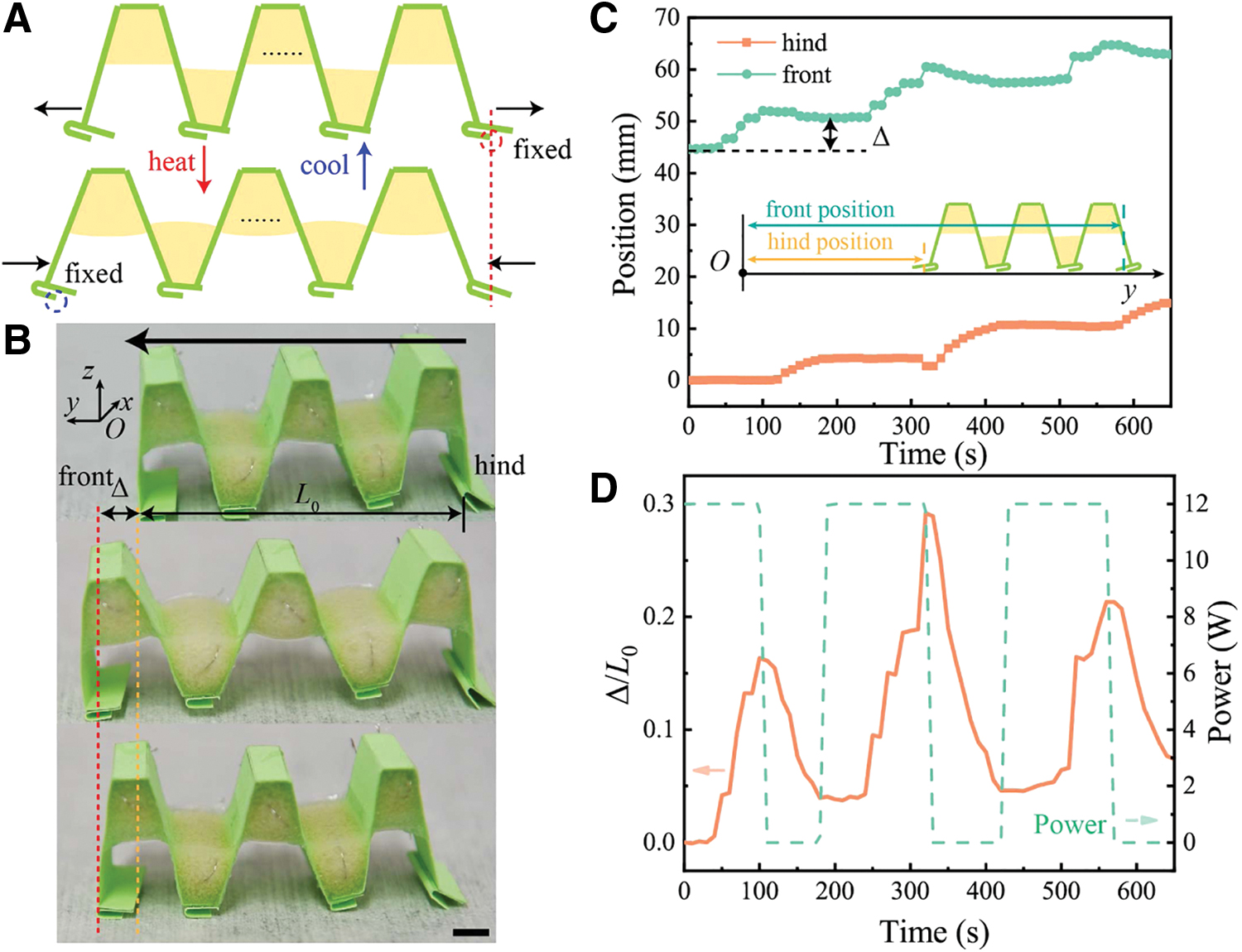
The mechanical analysis above indicates that thick curved bilayer structures with PCMs powered by temperature variation can generate relatively large motion without a significant loss of rigidity. Based on this feature, we design and fabricate inchworm robots, which are capable of multimodal locomotion with object carrying. Figure 5A illustrates the design of the inchworm robot where a resistance wire is embedded in the active layer to achieve electrical control of heating and cooling (see Materials Fabrication and Testing section in Supplementary Data and Supplementary Fig. S4). The curved bilayer structure has an initial radius R0 = 9.5 mm, total thickness h = 5 mm with active layer thickness 3 mm, and initial angle 2θ0 = 180°.
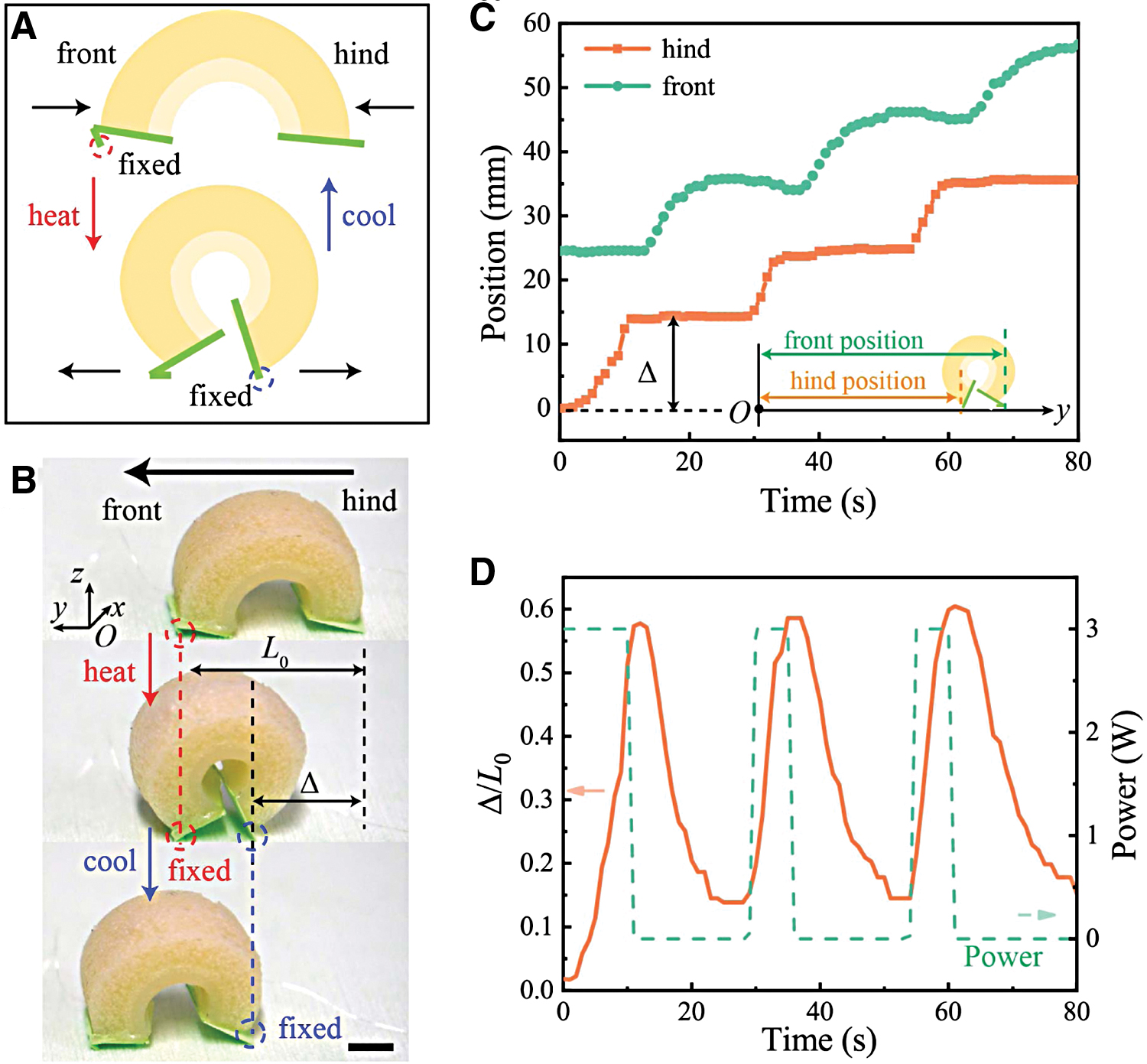
Characterization of crawling inchworm robots during heating–cooling cycles.
As shown in Figure 5A, the hind (right) end of the bilayer is attached with a flat sheet and on the front (left) end there is a small tip on the attached sheet. Due to the large end displacement and open angle change, the sheet edges, as well as the tip surface and edge, can form contact with the substrate surface. Upon heating the bilayer structure becomes more upward convex. Owing to the two edges connecting with the substrate, the front end has a larger coefficient of static friction than the hind end with one contact edge.33–35 Therefore, during heating the hind end slides forward (leftward here), while the front end stands and rotates around the tip edge. Upon cooling the bilayer structure tends to return to the initial less upward convex configuration and spreads two ends. As the sheet attached on the hind end rotates more, the friction force on the hind end is larger than that on the front end. As a consequence, the front end slides forward while the hind end is fixed. During the heating–cooling cycles, a unidirectional locomotion of the inchworm robot is achieved as shown in Figure 5B and Supplementary Movie M1. Temporal evolution of the position of the front and hind ends and relative displacement Δ/L0 are plotted in Figure 5C and D. In one heating–cooling cycle, the inchworm robot can achieve a relative displacement Δ = 0.6L0, which fits the result in Figure 3B. The speed of the moving inchworm robot is about 0.75 mm/s (0.03 body length/s), a medium speed level among artificial soft robots. 33
To demonstrate the carrying capacity of the inchworm robot, we put metal blocks on the robot and monitored its crawling (Fig. 6 and Supplementary Movie M2). The load affects the friction between the robot and substrate, leading to a decrease of the displacement Δ and the crawling speed in each heating–cooling cycle (Fig. 6B, C). The heavier the load is, the slower the robot locomotion is. The robot carrying 4 g load achieves Δ/L0 = 0.45 in one heating–cooling cycle, while Δ/L0 = 0.3 at 20 g load (Fig. 6C). The speed of the crawling inchworm robot at 4 g load is about 0.23 mm/s, while at 20 g load the speed is about 0.15 mm/s. Owing to the thick layer structure, the movement of the inchworm robot with heavy load (10 times its own weight) is stable and repeatable without tumbling. As the load is heavier than 25 g, the robot falls over due to the high center of gravity.
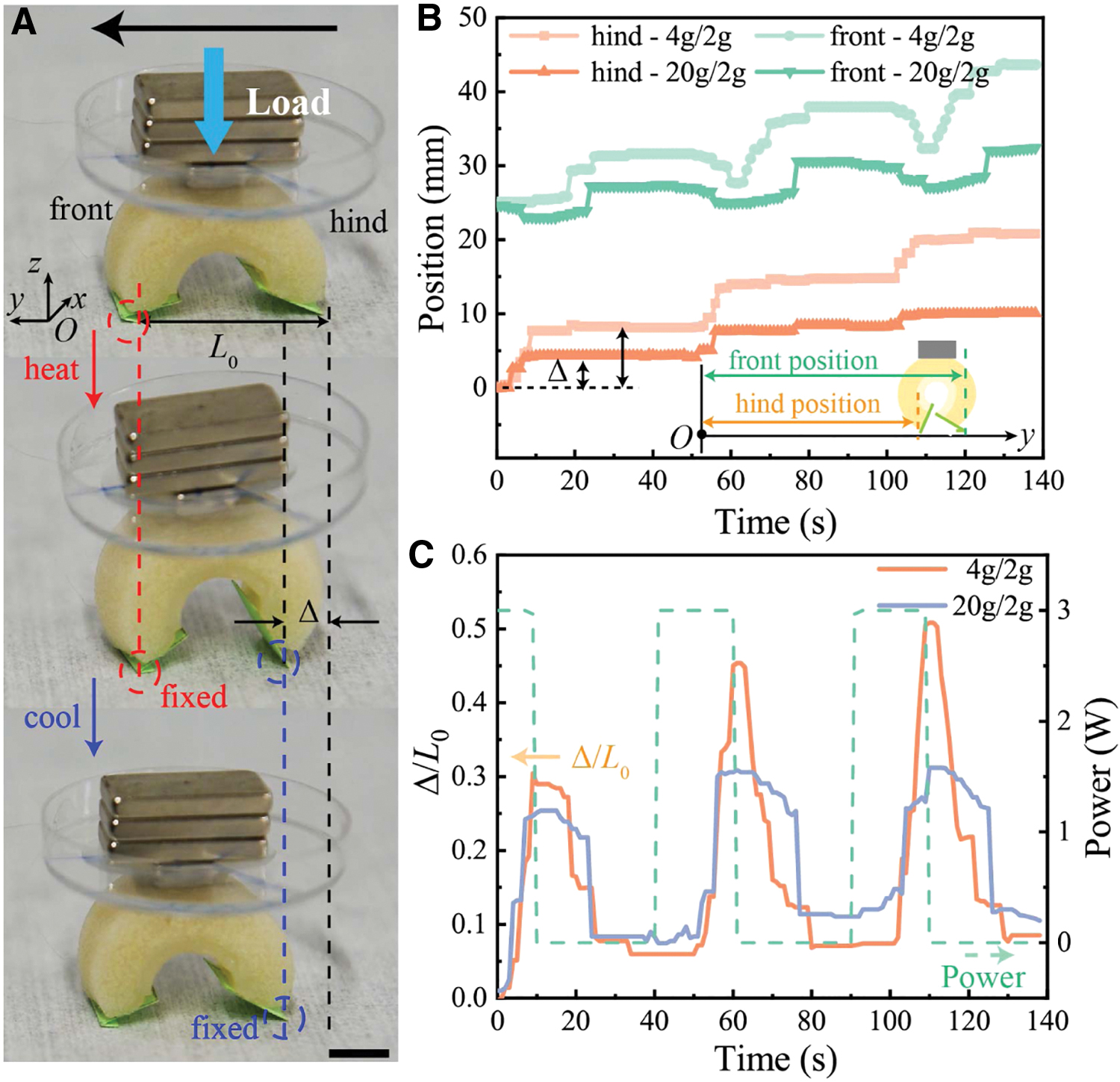
Inchworm robots crawling and carrying objects.
Assembling two inchworm robots in parallel,36,37 a two-part inchworm robot is fabricated with the capacity of multimodal locomotion such as crawling and taking turn by individual control of each inchworm part (Fig. 7 and Supplementary Movie M3). At the same input power, two parts of the inchworm robot move at the same pace and the robot as a whole crawl in a straight path. The inchworm robot can also take turn with a difference in the input power between two parts. A 90° turn can be easily achieved by the asymmetry deformation of the two parts of the inchworm robot.
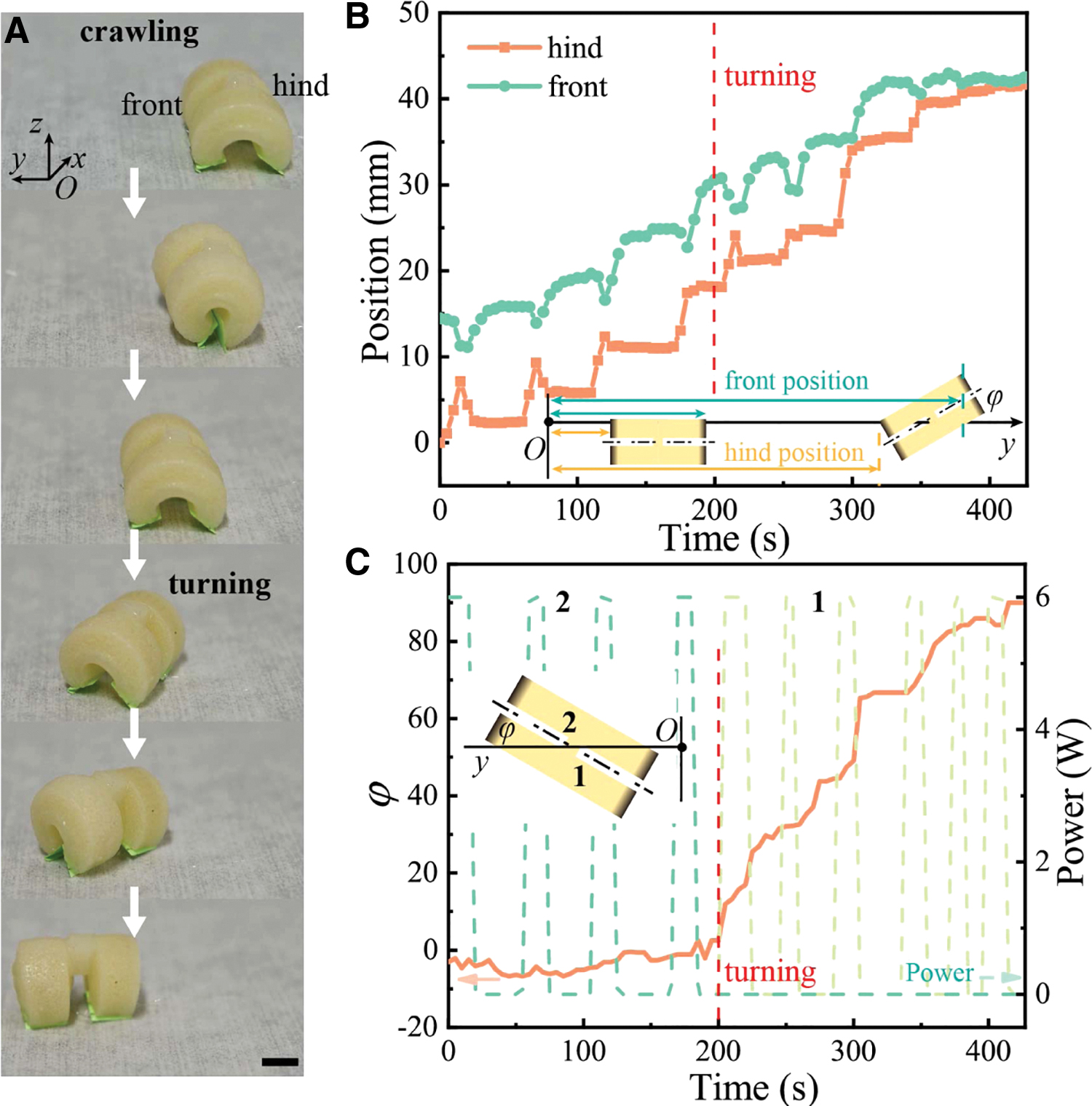
Multimodal locomotion of a two-part inchworm robot.
Design and fabrication of soft grippers with PCMs
The thick curved bilayer structure can also be used in the design of soft grippers (Fig. 8). Different from traditional grippers, 38 the soft gripper here is composed by n identical units, each consisting of a curved bilayer structure with PCMs and a connector connecting two neighboring gripper fingers (Fig. 8A). The curved bilayer structure has an initial radius of 9.5 mm, thickness of 5 mm (thickness ratio h1/h2 = 2/3), and the connector has the length of 12 mm and thickness of 2 mm. 2θ0 = 180°−360°/n is the initial open angle of the bilayer structure. The soft gripper is annular, and there is an inscribed circular region with radius Rin in the center. The grabbing is achieved by the shrinking of the gripper upon heating with the angle change from 2θ0 to 2θd and the radius change from Rin to Rd.
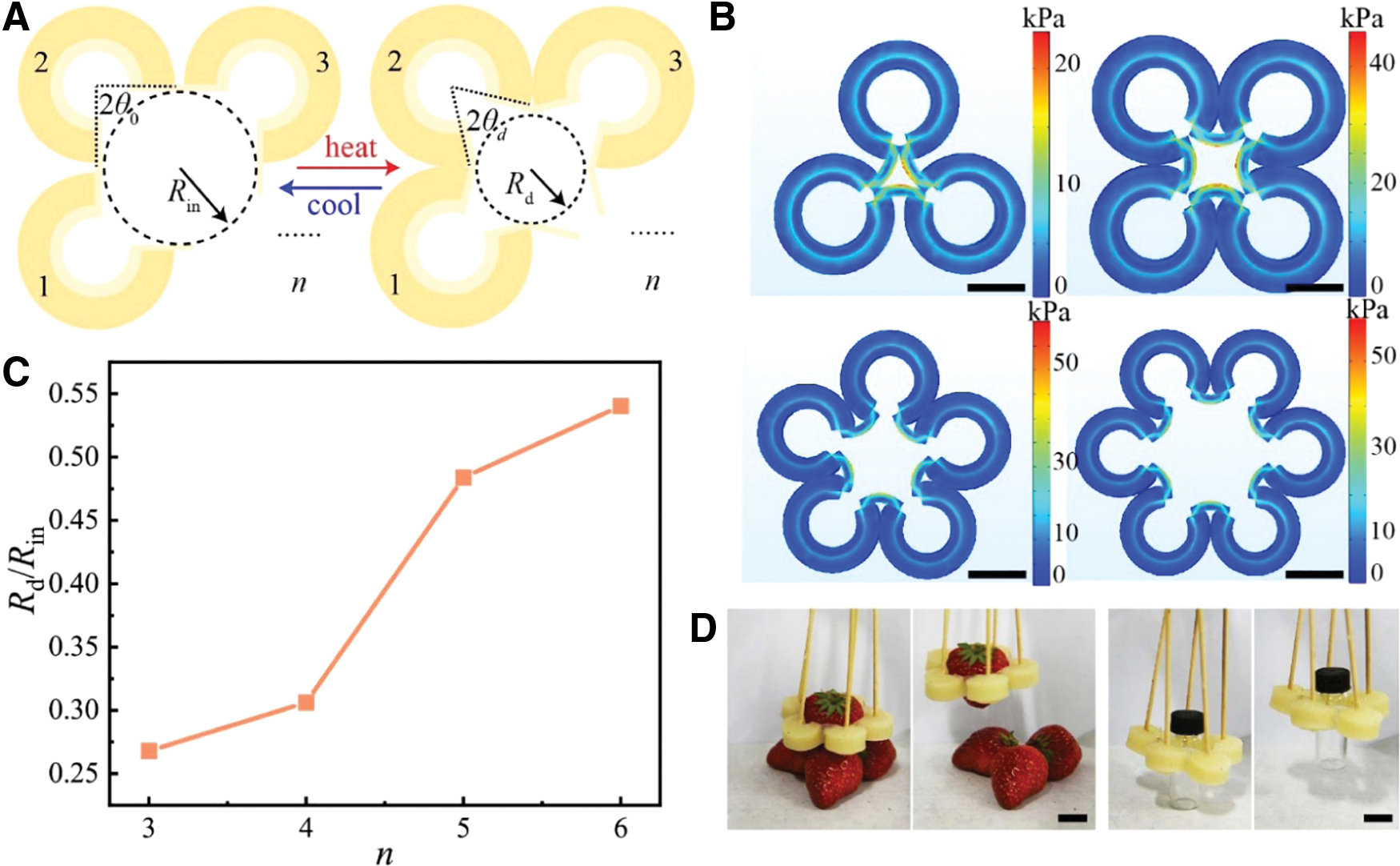
Design of soft grippers and grabbing demonstration.
Figure 8B shows the simulation results on the shrinking of the grippers (n = 3, 4, 5, and 6). In the simulations, the parameters of the passive layer are κ1 = 423 kPa, μ1 = 21.6 kPa, 27 and α1 = 0.00028 K−1, 31 and those of the active layer are κ2 = κe, μ2 = μe [Eq. (S4) in Supplementary Data], and α2 = αe [Eq. (2)], with temperature change from T0 = 298 K to T = 363 K. Figure 8C indicates the relative shrinking degree characterized by Rd/Rin describing the adaptability of the gripper to different object sizes. As n increases, Rd/Rin increases. At n = 5, the shrinking of the gripper ranges from 0.5Rin to Rin (Fig. 8C), which is large enough for the grasping of a strawberry and a small glass bottle (Fig. 8D and Supplementary Movie M4).
The object grasped by the soft gripper forms contact with the connectors, which are composed of silicone rubber without embedded resistance wires here. The temperature of the connector depends on its heat exchanging with the phase change composite, which is not evident as the thermal conductivity of silicone rubber is low (0.2 W/mK). 39 Therefore, there is no heat damage observed on the grasped object (e.g., the strawberry and bottle in Fig. 8D).
Self-folding structures with PCMs
Thermally active soft joint actuators are another interesting implication of the PCM-based soft composites. 40 As shown in Figure 9, we fabricate self-folding structures composed of two or three stiff sheets linked together with one or two folds (or creases). Between two long legs there is a soft joint actuator made of the PCM-based soft composite. The self-folding structure has an initial top angle 2β and a side angle ξ = (π – 2β)/2. The leg length is a = 20 mm, and the thickness of the soft composite is c = 10 mm. The trapezoid type structure has a top sheet of width b = 5 mm. Upon heating the soft composite expands, resulting in a spreading of the robot legs with a top angle increase of 2δβ; upon cooling the soft composite tends to return to the initial configuration with a decrease of the top angle. The crease subject to folding can be modeled as a spiral spring of stiffness k41,42 and the increase of the top angle is 2δβ = 2σc/k with σ as the blocked stress induced by the soft joint deformation (see details in Supplementary Data and Supplementary Fig. S2). In our experiments, 2δβ is around 10° (Fig. 9B). The corresponding relative displacement Δ/L0 is given from the geometrical relation as
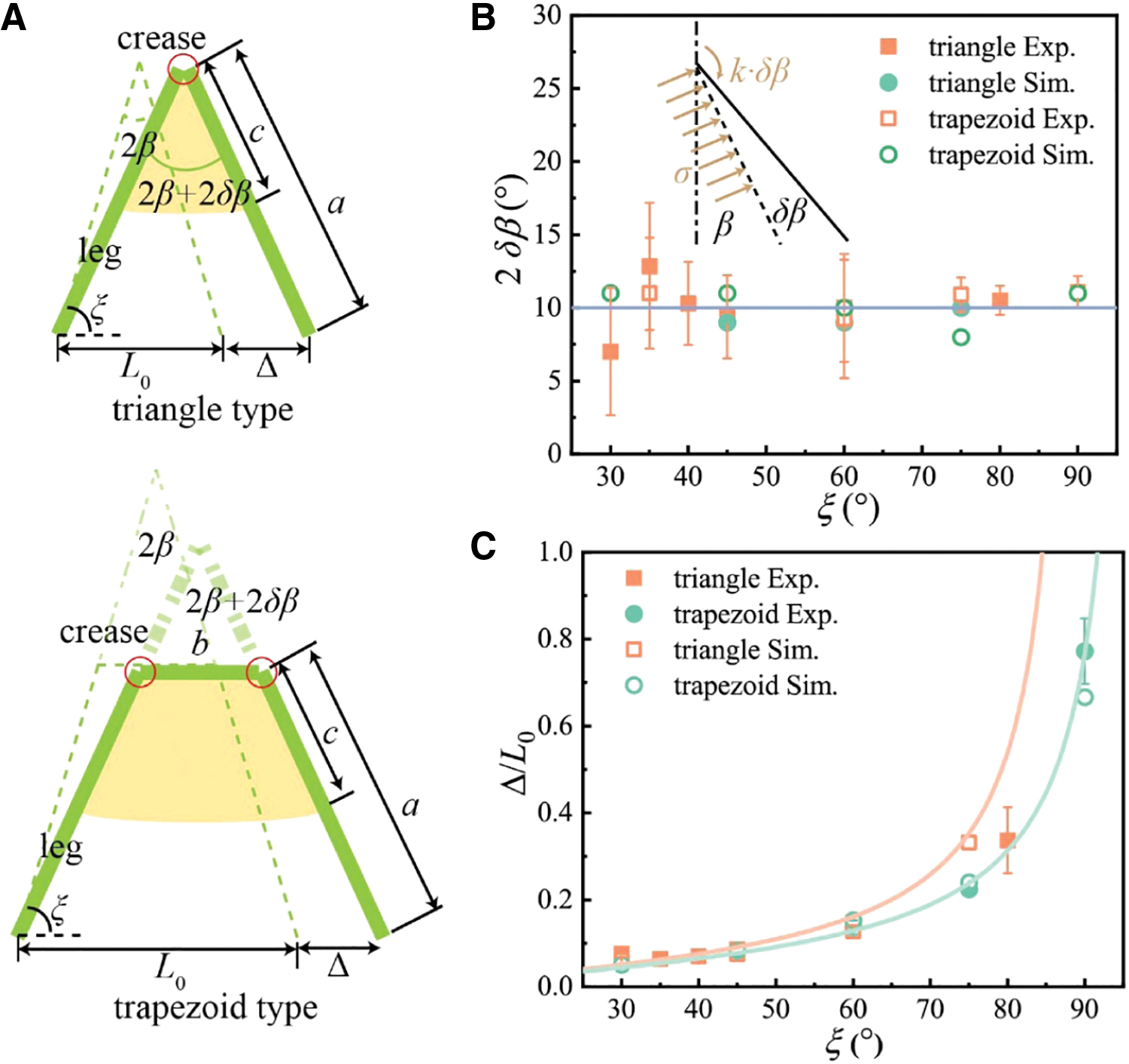
Design and characterization of self-folding structures with PCM-based joint actuators.
It is shown that Δ/L0 strongly depends on the side angle ξ (Fig. 9C). Structures with a large ξ exhibit a large displacement Δ/L0.
By attaching tips beneath the front and hind legs of the self-folding structure, the structure can achieve unidirectional crawling at a speed around 0.10 mm/s as shown in Supplementary Figure S6 and Supplementary Movie M5. The underlying mechanism is similar to that governing the crawling of inchworm robots in Figure 5. By repeating the heating–cooling cycle, the self-folding structures with attached tips achieve a push–pull locomotion. The self-folding structures are readily assembled into complex structure. Figure 10 shows an assembly of the self-folding structures into a worm-like soft robot by end-to-end linking. In one thermal cycle, the assembled structure with a side angle ξ = 80° moves with Δ = 0.2L0, consistent with the result in Figure 9C. The corresponding speed is 0.05 mm/s.
Multi self-folding structures with soft PCM-based joint actuators.
Conclusions
PCM-elastomer composites as attractive actuating components in forming advanced soft composites for robotic applications are facing the problem of less understanding of their thermomechanical properties, which in turn limits the rational design for engineering structures. Here we study the effective thermomechanical properties of the PCM-elastomer composites using the micromechanical theory and reveal how the vapor pressure in the PCM inclusions strengthens the composite expansion and output stress. Bilayer structures with programmable deformability are designed by controlling the inclusion distribution and contents. Complex locomotion and adaptable grapping are achieved through the assembly of deformable cells with asymmetrical friction and deformation. The results expand the functionality and application of the PCM-elastomer composites capable of adaptable deformation and multimode locomotion.
Footnotes
Author Disclosure Statement
No competing financial interests exist.
Funding Information
Financial support for this work was provided by the National Natural Science Foundation of China under Grant Nos. 91848201, 11988102, 11521202, 11872004, 11802004 and the Young Elite Scientists Sponsorship Program by the China Association for Science and Technology under Grant 2017QNRC001.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.