
Abstract
Biorobotics is increasingly attracting engineers worldwide, due to the high impact this field can have on the society. Biorobotics aims at imitating or taking inspiration from mechanisms and strategies evolved by animals, including their locomotion abilities in real scenarios, such as swimming, running, crawling, and flying. However, the development of skin-mimicking structures, allowing protection without hindering artifacts' movements, has been rarely addressed. Skin-mimicking structures play a key role for biomimetic robots that have to move in unstructured environments. Currently most of the skin used for robots in engineering adopts soft materials or bellow structures to enable both structural deformation and protection. However, the elastic nature of the former can produce support failure and increasing strain with deformation, while the humpy surface of the latter reduces the interactive performance with the environment. Herein, we designed a novel compliant structure for biorobots' skin, fabricated through a special configuration of both soft and rigid materials to reproduce attributes provided by natural epithelial structures. The presented skin has a simple fabrication process, as well as it is cost effective. The structure of this skin includes a thin conical shape where rigid iron rings are wrapped by soft polyester fabrics, allowing a theoretically zero elastic modulus when bended and stretched. The dimension of fabrics was specified to allow rigid rings having a certain range of free rotation and translation. The possibility of free bending and stretching of the structure was implemented by overcoming low sliding friction of adjacent rings. To empirically test the effectiveness of the proposed structure, a model, including 20 segments, was also fabricated. Experimental results from the bending tests, both in aerial and underwater environments, as well as from the folding tests, demonstrated the successful performance of the skin prototype in terms of low resistance and energy consumption. Finally, the proposed highly compliant structural skin was mounted and tested on a fish robot previously developed by authors, to further show its effectiveness.
Introduction
Biorobotics is a promising and challenging scientific field, increasingly attracting interest in science and engineering. 1 Important challenges in biorobotics include the reproduction of sensory capabilities, energy management, cognition, and physical abilities of living organisms to develop artifacts able to successfully behave in unstructured environments. 2 Currently, many and impressive contributions have been reported in imitating motion performances evolved by living organisms to develop biologically inspired artifacts outperforming traditional artificial agents, such as swimming like fishes,3,4 running like quadrupeds,5–7 crawling like snakes,8–10 and flying like birds.11–13 A major issue related to movement in real environments is represented by materials and structures used as a skin to cover these artifacts. Indeed, it is fundamental to ensure protection from external factors without hindering the movement of the robots. However, research on advanced and feasible skin-mimicking structures has been almost ignored so far. In many animal species, agile motion performances occur thanks to the presence of compliant and robust epithelial structures (e.g., skin, armor, and so on). These structures have several common mechanical and functional characteristics, including flexibility to deformation (e.g., for body bending or stretching), hardness to resist penetration, uniform surfaces to friendly interact with environment, and sealing to avoid leakage. In this context, bioengineering challenges are represented by the synthetic reproduction of these characteristics, as well as by simplification and cost effectiveness of fabrication processes.
The high performance and multiple functions of the scaled skin seen in some animals have attracted the interest of researchers. Vernerey et al. analyzed the performance of the skin and scales of teleost fish using a theoretical analysis and experimental tests. 14 Other researchers have developed many scaled skin inspired by a natural morphology. Funk et al. synthesized the skin of a striped red mullet using a low-modulus elastic mesh that holds relatively rigid plastic scales. 15 Tatari et al. develop a variable stiffness scaled skin using specially designed plate-like scales consisting of layers of low-melting point alloy phase-change materials fully enclosed inside a soft polymer. 16 Chintapalli et al. fabricated and tested a bioinspired segmented armor made of hexagonal glass plates resting on a rubber substrate. 17 These examples show how biomimetic structures look similar to a natural scaled skin and can perform bending and penetration resistance. In each of these cases, authors used thin and soft materials as substrate, which are covered or pocketed by rigid man-made scales, but they were not used in biorobots. Biomimetic skins for biorobotics engineering should have integral stiffness to avoid outer pressure because the inner structure of biorobots usually cannot provide enough support to guarantee the integral shape of skin. Therefore, soft substrate with scales is not suitable for biorobotics engineering applications.
There are two main general methodologies to develop biomimetic skins. One methodology is based on the use of flexible materials which can deform easily, such as silicon rubber,18,19 a rubber coating, 20 and latex. 21 Although these soft materials can keep the robot's surface even, their deformation increases the strain on the skin when stretched, which increases the load of the driven system. Furthermore, their low hardness and stiffness cannot prevent penetration from the external environment or resist compression by pressure. The other methodology is based on geometrical approaches to allow the bending and stretching with low resistance, such as bellows or incomplete structures. Bellows22,23 are widely used commercially for collapsible ventilation air ducts. They can easily bend by stretching on one side and contracting on the other using premade helical ridges and valleys arranged on its surface.24,25 This method has been widely used in many fish-like robots and worm robots.3,4,26–28 However, the corrugated structure of a bellow makes its surface uneven, which decreases the swimming performance of an aquatic robot. In fact, this kind of skin can hardly be found in nature. An incomplete structure can also be bent and stretched easily and is used in worm-like robots because part of the surface can be removed to avoid stress during compression or bending.19,26–29 However, it has an obvious deficiency in reducing the penetration resistance.
Investigations show that many insects and arthropods have a series of hard stacking annuli on their body surface that overlap each other through soft skin. They can bend their body by overlapping the annuli on one side less and those on the opposite more, such as in the skin of a millipede (Fig. 1A) 30 and skin of a cicada's abdomen (Fig. 1B). 31 Inspired by such morphology, we proposed a novel highly deformable composite structure, which can bend and extend in a wide range, with zero elastic modulus. This particular design meets the requirements of skins that should be used for biorobots operating in real environments. Differently from most deployable structures where rigid components are connected directly through hinges or creases, in the proposed study, rigid rings are connected indirectly using soft materials without any hinges. This structural skin can achieve the following advantageous attributes: (1) it bends and folds easily; (2) no gaps appear between the rigid parts during their relative motion because of the limitation provided by the soft material; (3) the surface is even and without sags and crests; and (4) it is well sealed because all of the rigid rings are wrapped in one piece of fabric. A modeling prototype with 20 rigid rings was built and is shown in different positions in Figure 1C and D. The rigid rings were made of galvanized iron and wrapped in polyester fabric, which is commonly used in umbrellas. The fabricated prototype with 20 rings could achieve an extension and compression ratio of 9.4 and could be bent by more than ±90°. These figures could be increased by increasing the number of rings. This prototype was easily fabricated through an interesting method and costs less than $5.

New design for compliant structural skin which can be folded and bended inspired by morphology in nature.
Methods
Design and motion analysis
Considering the desired deformation performance, some special mechanisms have been investigated, such as deployable mechanisms,32–35 metamorphic mechanisms, 36 and reconfigurable mechanisms.37,38 Some of them can produce large deformation, but they are not suitable to satisfy the requirements needed to develop a skin for biorobots. Inspired by the natural morphology shown in Figure 1A and B, we proposed a new highly compliant structural skin with composite materials, integrating iron rings and polyester fabrics. To achieve the goals above mentioned, the main challenge is to connect a series of rigid segments through soft fabric allowing certain relative motion in adjacent rings partially overlapping and prevent departure from each other. It means that all rigid components should be stacked together on axial direction, similar to the arthropod morphology mentioned above. Furthermore, to ensure the sealing of robots fitting this skin, one piece of fabric was used to connect rigid rings.
Based on this consideration, we propose for the first time a synthetic compliant structure with composite materials to produce a life-like skin (Fig. 1A, B) that can be used to cover biorobots. In this study, a series of rigid rings are wrapped using one piece of soft fabric to implement bending and extending performance with zero elastic modulus only leading to over friction between adjacent rings. In addition, there are no hinges in the structure, differently from bellows or collapsible ventilation air ducts, as well as there are no sags and crests on its outer surface. The configuration and principle of the new structure are shown in Figure 2.

Module and motion principle of the new structural skin.
In Fig. 2A, the iron rings were arranged in series and connected together using fabric (the outer fabric is blue, and the inner fabric is yellow), forming a sandwiched structure. Super glue (shown in orange in Fig. 2A) was used to adhere the fabric to the surface of the iron rings. The connection between the iron rings and soft fabric is shown in Figure 2B in a sectional view. The diameters of the rings gradually decreased from the largest ring to the smallest ring (ring n), which could be denoted as ri > ri + 1 (ri is the diameter of ring i and ri + 1 is the diameter of ring i + 1).
The structure in Figure 2A can actually cover a robot's body. However, the fabric between adjacent rings decreases radial stiffness, and wrinkling would appear in the fabric when the body is bent. The structure in Figure 2C shows how all iron rings are overlapped partly by adjacent rings and relative motion between adjacent rings is allowed within a certain range (which should be guaranteed by the soft fabric shown in Fig. 2D where four layer fabrics are located between adjacent iron rings). We propose an easy and smart method to transform the structure from Figure 2 A to C that is based on letting the smallest ring moving through all other rings one by one in axial direction without any rotation. During this transformation process, ring n went through n − 1 rings, ring n − 1 went through n − 2 rings, and so forth (as shown in Supplementary Movie S1 and Supplementary Fig. S2). The key property was that the connections between the soft fabric and iron rings were invariant, and the transformation only changed the shape of the pieces of fabric. Bi and
To ensure that the entire body of a robot was completely covered by the iron rings after the structure was transformed, adjacent rings had to overlap to a greater or lesser extent, which meant ring i could move within a range where point
A configuration that met the above condition allowed the iron rings to move within a distance of 2l − L relative to adjacent rings. Some part of the soft fabric was redundant and released when an iron ring moved less than 2l − L, where some wrinkles appeared (Fig. 2B, G). In the proposed configuration, when the skin was stretched, stretching forces fi and
To allow the flexible skin to easily stretch and bend, the radial dimensions of the iron rings were also constrained, which meant the radial gap between adjacent rings had to be larger than four layers of the soft fabric (Fig. 2C, D). In fact, considering the deformation of the rings generated during fabrication, the gap had to be larger than four layers of the soft fabric to decrease the friction between adjacent rings. This gap allowed not only translation in the axial direction but also rotation along two orthogonal lines on the plane of the iron rings. In fact, translation along the orthogonal axes was also theoretically allowed. However, it was limited to within a very tiny range, which could be ignored. Therefore, the main motion of the proposed highly compliant composite structure was elongation and contraction along the axis of the rings and bending around two orthogonal lines, with a total of three degrees of freedom (DoFs) for each ring (Supplementary Movie S2).
To describe the bending motion of the compliant composite structural skin, the two extreme cases shown in Figure 2E and F were analyzed. In the first case, all the rings are fully folded, and it can be assumed that the adjacent rings are in contact on one side where contacting point O is located. Thus, a gap appears on the opposite side, which is denoted as
where d1 and d2 are the diameters of the outer ring and the inner ring, respectively. In the other case, all the rings are fully stretched, and the fabric is tight. The assumption is similar to that in the first case. The inner ring rotates counterclockwise relative to the outer ring. The maximum rotational angle
Both of the above equations show the boundary of the maximum rotational angle for adjacent rings. These equations are fundamental to design the bending performance of the compliant structure.
Another interesting phenomenon in the proposed flexible structural skin was that wrinkles should have appeared both inside and outside of the rings when the pieces of fabric were released under the opposite forces acting on the rings in Figure 2D. However, the outer surface of the prototype remained very smooth no matter how it moved. This is a useful characteristic of the proposed structure. Wrinkles would appear only when the pieces of fabric on the surface were released, which required the path on the surface to be shorter than the dimensions of the fabric. In reality, the fabric on the outer surface of the rings was tight, while that on the inner surface could be released using inward movement. In addition, there were many wrinkles on the inner edges of the segments due to the thickness of the rings (Fig. 2G), where the soft fabric tended to be folded.
Materials and fabrication
Galvanized iron rings were adopted as the rigid components, and a polyester fabric (the kind of material used for umbrellas) was chosen as the soft material due to its outstanding strength and sealing performances. To prove the feasibility of the new compliant structural skin, 20 rings were used to build a skin model. Every iron ring had a width of 25 mm and thickness of 0.2 mm. The radial gap between adjacent iron rings was 0.67 mm (
The dimensions of the polyester fabric could be calculated based on the above existing conditions. Iron strips with a thickness of 0.2 mm and width of 25 mm were cut into sections with different lengths, which could be calculated based on the circumferences of the rings according to the desired sizes and gaps. Super glue was used to adhere the iron strips to the fabric in parallel for a distance of 40 mm (Fig. 3A). In fact, although one piece of fabric can ensure the final goal, to improve its sturdiness, an additional piece of fabric was also used to form a sandwich structure (a segment) with the iron strips (Fig. 3B). To have a long and thin-walled cylindrical structure, the two ends of all iron strips were connected to form a ring, and then the two sides of fabric were stuck together using super glue (Fig. 3C). All of the rings were pressed together on one plane (Fig. 3D, E), with the smaller ring on the inside and the larger on the outside. Then, the smallest one was pulled out of the plane through all the others in the opposite direction, and a compliant structural skin was obtained (Fig. 3F).
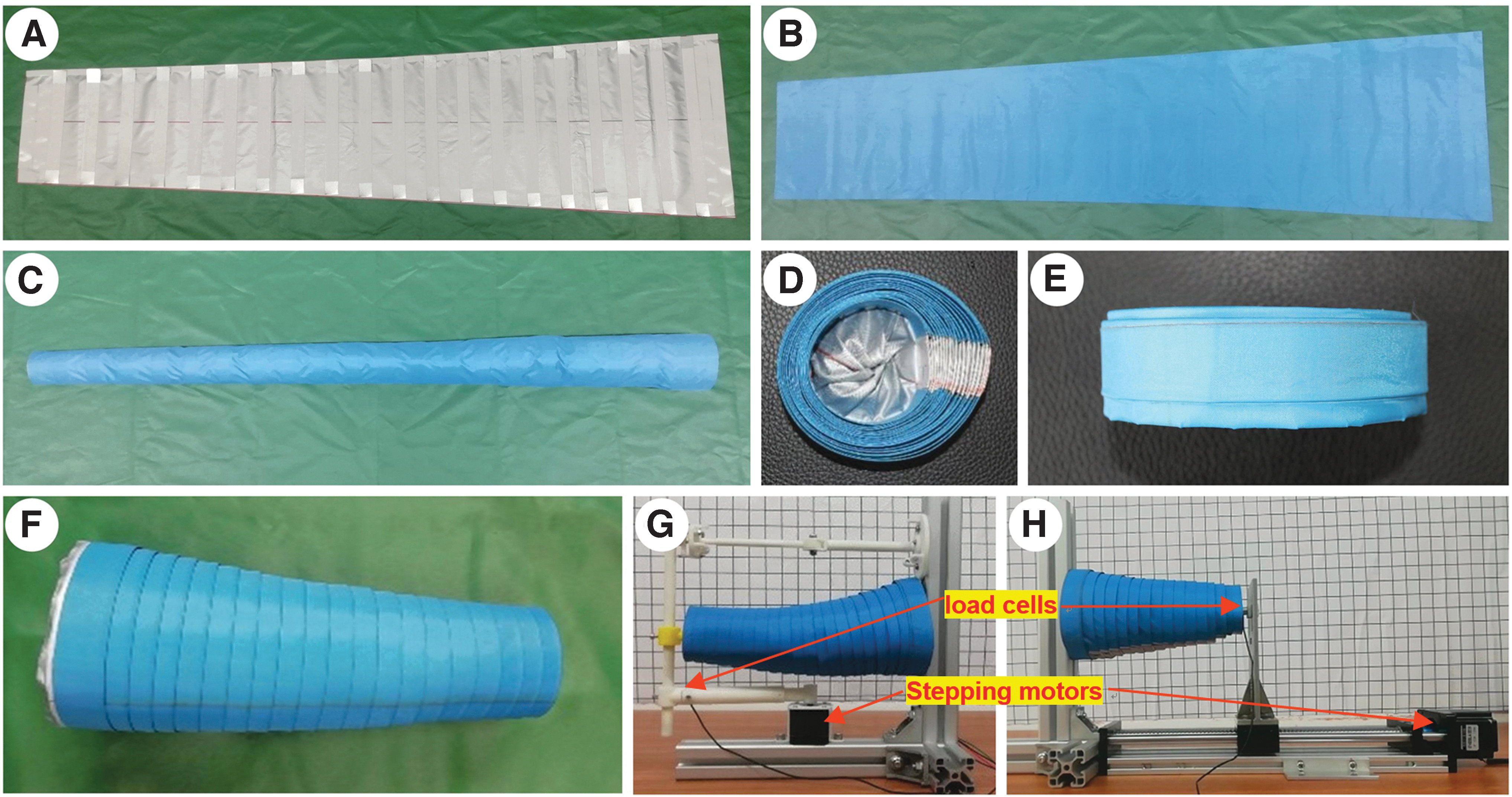
The fabrication process of the proposed compliant structural skin and test platforms.
Experimental setup
Two platforms were developed (Fig. 3G, H; Supplementary Fig. S1), to test the bending and folding performances of the structural skin. Bending and motion tests were conducted through controlling stepping motors (US-17HS4401S; Usongshine), and the performance was evaluated using load cells (Simba Touch Company). The force derived from a load cell was amplified, filtered, and transmitted to a microcontroller (Arduino Mega 2560) using the serial port. The main structure of each platform was made of aluminum alloy and three-dimensional (3D) printing resin.
Experiments and results
Theoretically, bending and folding behaviors are fundamental for biorobots when they navigate in the environment. During these motions, the driven system of these robots has to output additional force or torque to deform their skin shape to make it match the locomotion; therefore, it is obvious that the easier their skin deforms, the better the locomotion behavior. In our design, the deformation of the compliant structural skin consumes just few derived from the sliding friction between adjacent rings, which was caused by the deformation of the iron rings and their thickness variation resulting from the use of glue and gravity. Since an accurate sliding friction was difficult to calculate, experiments were conducted to evaluate the resistance during bending and folding. Bending experiments in underwater conditions were also conducted, as the proposed skin has to be used for a fish robot.
Bending performance test in air
The proposed skin could be bent with two DoFs. As the structural skin was made of circular rings, just one DoF bending was tested. Because a fish robot can bend its body with different degrees of curvature depending on the locomotion speed, experiments were carried out to test the bending performance of the proposed skin where the end ring rotated within a range of ±90° with two radii (r = 100 mm and r = 150 mm). One typical bending test of the structural skin can be found in Supplementary Movie S3, which shows bending in the air using the platform shown in Figure 3G.
In the platform for testing bending performance of the model, a stepping motor was used to drive a 3D printed beam to rotate around the shaft of the motor. The small end of the model was fixed on the rotatable beam, and the large end was fixed on the platform. Thus, the trajectory of the small end of the model was circular, with radius r (Fig. 3G). A load cell was used to detect the force provided by the rotational beam on the small end of the model. The rotational radius of the trajectory could be changed by adjusting the length of the beam. The torque acting on the end ring could easily be calculated. The flexible model was driven by the stepping motor, which caused a reciprocating bending motion around its equilibrium position. This could be divided into four phases.
Figure 4A shows the torque acting on the small end of the model when it was bent with a radius of 100 mm (see Supplementary Movie S3). Bending started from the neutral position, and the small end of the model rotated clockwise to ∼90° from the top view (phase I). After that, the small end was driven to rotate back to the neutral position (phase II). Similar motions were performed on the other side, and phase III and phase IV could be achieved. In Figure 4A, the resistance is very low where the bending angle is in the range of ±50° because rotation is easily performed for adjacent rings. Compared with the mechanical resistance of the mechanism reported in Ghosh et al., 39 which was fabricated with rigid scales embedded in an elastic substrate, the equivalent calculated load needed to generate 15 mm of deformation was ∼2 N with this design. This was less than the resistance to bending. However, it gradually increased in phase I and phase III, and the maximum torque that appeared at the end of phase I and phase III was up to 0.25 Nm because a large amount of fabric had accumulated at the proximal side, while it was fully extended at the distal side. As seen in Figure 4B, the energy consumption of these phases was ∼0.15 J, where a negative power value appeared when the skin returned to the beginning position, which meant that the torque provided by the beam resisted the return to the neutral position.

Bending experiment results with radii of 100 and 150 mm in air and water conditions.
Figure 4C and D shows the experimental rotational results for the four phases of the end segments with a rotational radius of 150 mm. The shapes of the torque and energy consumption in this case were similar to those in the experiments with a radius of 100 mm. However, the magnitudes of both the torque and energy consumption were higher than those in the former case. The maximum torque when bending the skin was up to 0.4 Nm, while the energy consumption was nearly 0.3 J. This was because the rotation with a larger radius generated a longer trajectory for the convex side of the model, which made the tensile force on the convex side of the rings larger. Thus, the maximum resistance was larger than that with a radius of 100 mm.
Bending performance test in water
The experiments described in the previous section showed that the flexible prototype had a good bending performance in air with different bending radii. However, our prototype was designed for a fish robot, and bending performances also in underwater conditions should be considered. Indeed, buoyancy and hydraulic resistance may influence the bending motions in aquatic environment. Bending tests in underwater conditions were conducted with the same platform (Fig. 3G). Because the bending resistance underwater could be greatly influenced by the rotational velocity, and it was not an intrinsic feature of the skin, the bending performance was tested in a quasi-static state using a slow speed of 3°/s and radius of 100 mm. The goal of this experiment was to determine the influence of buoyancy and wetting on the skin bending performance. In Figure 4E, the bending torque provided by the platform to the skin in underwater condition had a shape similar to that on aerial conditions. When underwater, the magnitudes of the torque and energy consumption were lower than those in air, because buoyancy compensates a certain gravity. One test video can be found in Supplementary Movie S4. The results demonstrated that the proposed structural skin could also easily bend in aquatic environment and could be used for a fish-like robot.
Folding and unfolding performance test in air
The skin had to have a sufficient folding and unfolding performance to be used for a worm-like robot, which moves by extending and shrinking its body.25–27 The resistance during folding and unfolding was tested on a platform where the largest ring was fixed to the base and the smallest one was connected to a moveable frame using a load cell. The moveable frame was fixed to the slider of a linear guide. As seen in Figure 5A, the folding phase began with no load acting on the skin (the free length was ∼235 mm). The arrow shows the movement direction. The moving speed was ∼3 mm/s to reduce the influence of dynamics. With an increase in folding, the axial force increased smoothly, and it was less than 4 N when it was compressed to more than 150 mm. The force increased quickly after the folding length became larger than 150 mm because the friction between rings increased quickly in the folding phase. The folding test results reported in Funk et al., 15 which used biomimetic fish skin materials with plastic scales pocketed in a low-modulus elastic mesh, showed that there was a linear relationship between the strain and nominal stress, where the strain varied from 0 to 1, and the nominal stress varied from 0 to 1.4 Pa. In the current design, the strain varied from 0 to more than 8, and the nominal stress varied from 0 to 25 Pa. Moreover, the relationship between the strain and stress was similar to that shown in Figure 5A, which means that the proposed structural skin was not elastic.

Folding and unfolding experiments of experiments and its process.
In the unfolding phase, the folded structure was stretched, where the axial force decreased quickly when the direction of motion changed. This was different from the general deduction that the axial forces of stretching and compressing should be reverse processes with identical magnitudes because they can be viewed as mirror motion. However, in actuality, the phases were different not only in the aspect of the axial force but also in the ring movement order. According to the data acquired in the experiments and shown in Figure 5A, it could easily be found that the folding force was smooth, and the deploying force had some fluctuations. Furthermore, the axial force was found to have a close relationship with the ring movement order. At the beginning of folding, the friction on each ring was almost the same, folding occurred almost simultaneously in each ring, and it smoothly increased with a gradual increase in the redundancy of the fabric and overlap of the rings (Fig. 5C and Supplementary Movie S5). At the beginning of unfolding, the friction induced by gravity was dominant; therefore, rings with smaller diameters were stretched out first, and then larger rings were stretched out (Fig. 5D and Supplementary Movie S5). The friction of the large rings in the current state was lower than that in the folded state because many smaller rings had been stretched out and less gravity acted on the large rings. During this process, the stretching occurred on the rings one at a time to overcome different amounts of friction, which induced fluctuations. Figure 5B shows the energy consumption during both processes, where the stretching process costs less than the folding process, and the total amount was ∼0.8 J.
Preliminary test on sailfish-like robot with proposed structural skin
To verify the performance of the proposed flexible structural skin, a sailfish-like robot was developed in our laboratory. It had a length of 1250 mm, not including the long jaws. Skin with 50 rings was made to cover this robot's surface, which had a diameter of 180 mm in the largest segment and 75 mm in the smallest segment. The bending resistance in the air was very low, which can be seen in Supplementary Movie S6. An experiment was conducted in an inflatable pool to test the water tightness. The experimental results showed that the developed skin had good water tightness with the robot floating on the surface of the water with more than 80% of its body submerged in the water. Moreover, a swimming motion test of the skin was performed in a swimming pool (Fig. 6). The transmission mechanisms of the sailfish-like robot were modularized using six modules. The undulatory motion of the fish robot was derived based on a short video downloaded from the internet, which clearly showed the swimming motion of a real sailfish in its natural environment. As seen in Supplementary Movie S7, the sailfish-like robot developed in our laboratory could perform life-like undulatory motions, where the skin effectively complied with the motion of the inner drive mechanisms to keep the robot fish surface continuous and streamlined even when it undulated its body near one wave.

Series of photos of sailfish-like robot swimming in a pool. The swimming video of the fish robot covering with the proposed skin can be seen in Supplementary Movie S7. Color images are available online.
Conclusion
In summary, a novel compliant structural skin was developed by integrating the merits of rigid materials and soft materials inspired by a natural morphology, which has multiple advanced attributes, including bending and folding with very low resistance, an even surface profile, low cost, and easy fabrication.
To evaluate the feasibility of the proposed structural biomimetic skin, a prototype was fabricated using galvanized iron rings and polyester fabric. We analyzed the deformability principle, as well as the existing conditions in dimensions. The folding/unfolding and bending performances were tested. Overall, the resistance and energy consumption were very low during most of the ranges for these motions. In detail, the maximum axial forces for the folding and unfolding performances were 6 and 2 N, respectively. For the bending motion, the maximum resistance torques were 0.2 and 0.4 Nm when the small end of the model moved in the air with circular trajectory radii of 100 and 150 mm, respectively. A bending test in underwater condition showed similar shapes for the results, but a lower resistance than that in air.
Thanks to its robust and easy fabrication, as well as its performances, the proposed concept and technology of biomimetic skin can have wide applicability and high impact in the design of biologically inspired robots, such as fish robots, snake robots, worm robots, and so on. The flexibility of the structure and folding and unfolding ratio were related to the number of rings, which means that users can achieve their desired skin by adjusting the number of rings. This skin has an even and conical profile, which will be beneficial for robots interacting with natural environment, as in the case of our fish robots that displayed an efficient swimming performance.
Footnotes
Authors' Contributions
Z.S. conceived the idea, designed the research, and drafted the article. Z.F. built the prototypes and platform, collected and processed the data, and drew the figures. D.R., P.D., and J.S.D. improved the article and supervised the research.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
We acknowledge the support of the National Natural Science Foundation of China (NSFC) through grant numbers 51975401 and 51721003.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.