
Abstract
Achieving both high compliance and stiffness is a key issue in stiffness-tunable soft robots. A wide-range variable-stiffness method keeping pure soft characteristic is proposed by bioinspired design of deep-sea glass sponges adopting thermoplastic starch. The stiffness-tunable mechanism is designed through force analysis and optimization of its bionic cellular structure. It is fabricated with load-weight ratio exceeding 470. Then, a wide-range stiffness-tunable omnidirectional-bending soft actuator (WOSA) is realized, and the bending stiffness model is established. Comparative experiments of stiffness and deformation are conducted on WOSA and a pure soft actuator (PSA) with the same size. Results show that the WOSA can get 92.3 times initial bending and 70.8 times torsional stiffness variation range, of which the flexibility is even better than PSA. A gripper assembled by three WOSAs is verified through stiffness adjustment that it can grasp different weight fragile, soft items from the unshelled fresh egg, boiled egg yolk to grapes. It can even lift a dumbbell weighting 3.32 kg. Finally, a manipulator demonstrated its potential in future minimally invasive surgical applications due to its wide stiffness range and large deformation capacity.
Introduction
Soft tissues and organs of animals, such as octopus arm, elephant trunk, and so on, can achieve both excellent flexibility in deformation and stability in manipulation by tuning stiffness in wide range. Inspired by this biological superiority, researchers have developed many variable-stiffness methods for soft robots and actuators.1–3 However, the insufficient stiffness range, compliance loss, and weight increasing generally existed in current variable-stiffness methods. How to solve these problems is of great importance to practical applications.
Most current variable-stiffness methods can be divided into two categories. One is to form antagonism between structures, such as antagonistic actuation scheme,4,5 granular jamming,6–8 layer jamming,9–11 and so on. The effects are greatly affected by the antagonism force. A chain-like granular jamming structure can achieve 57-fold stiffness variation range due to the ability to apply large force on the chain-like structure. 12
Another is to change the elastic modulus of materials, such as the magnetorheological (MR), 13 the electrorheological (ER), 14 the low melting point alloys (LMPAs), 15 the thermoplastic polymers (TP),16,17 and so on. Different from the antagonism, phase-change methods usually respond slowly, but can achieve wider stiffness variation range. The MR and ER can be applied to some specific occasions for the need of magnetic or electric fields. The LMPAs and TP are more versatile for the need of Joule heat.
The LMPA can be transformed between solid to liquid state. A variable stiffness dielectric elastomer actuator embedded with LMPA exhibits ∼90 times higher stiffness than the actuator without LMPA and a load-weight ratio (LWR) of ∼5.5. 18 A continuum manipulator embedded with 20 g of phase change alloy could withstand 1 kg force in solid state. 19 Another soft actuator using LMPA for stiffness variation could achieve 36 times stiffness range and ∼10 times LWR. 20 The LMPA can achieve wide variation range of elastic modulus, but its high density also affects the LWR of the actuator.
The TP can achieve glassy, rubbery, and viscous state at different temperature. Although it is usually not as stiff as the LMPA, it performs better in plasticity, tenacity, and lightweight. In Yang et al. 21 a variable stiffness soft pneumatic robotic finger could achieve 24.9 times stiffness ratio using shape memory polymer (SMP) joints. A shape memory alloy (SMA)-based soft gripper is proposed with ∼55-fold changeable stiffness SMP hinges. 22 A fast-response, stiffness-tunable (FRST) soft actuator integrated with SMP layers can realize an initial stiffness range from 16 to 288 N/m, and a gripper with three FRST actuators can lift a 1.5 kg dumbbell at stiff mode. 23 In Al-Rubaiai et al. 24 the 3D printed conductive polylactic acid (CPLA) is used for stiffness tuning of a soft pneumatic actuator that can hold 0.8 kg weights. The SMP and CPLA are used in an operation range from glassy state to rubbery state. If they are heated into viscous state, better softness can be achieved, but the temperature would be more than 200°C.
The stiffness of a mechanism is determined by the material composition and structure design. Theoretically, stiffness variation of a mechanism is caused by the change of the material's modulus, while the structure parameters such as the sectional/polar moment of inertia act as gain coefficients. Higher structural parameters would enlarge the stiffness. It provides a design concept to achieve high stiffness and large load capacity. If high flexibility and interaction security are required, such as the surgery soft robots, it is recommended to use materials that can achieve extremely low elastic modulus, such as liquid LMPA and viscous TP. If high stiffness is also required to achieve stable operation, optimal structure design can improve the stiffness while the material has been chosen.
There are various lightweight and high-stiffness structure in nature, such as the honeycomb, 25 toucan beak, 26 skeleton of glass sponges, 27 and so on. These structures have inspired us in mechanical design. The glass sponge is an ancient species living in the deep sea. It is anchored to the sea floor and can withstand high hydrostatic pressure and ocean currents. Its wall thickness is usually 1–2 mm, while the longest can grow to ∼2 m. Researchers have found the excellent mechanical properties mainly come from its special cage-like skeleton, which is composed of vertical, horizontal, and diagonal struts.28–30 In Li et al. 31 two structures are proposed based on the morphological characteristics of glass sponges, and their bending stiffness is higher than the same weight honeycomb structure. In Fernandes et al. 32 the diagonal reinforcement strategy of the glass sponge is optimized to achieve the highest buckling resistance.
In this research, a wide stiffness tunable mechanism is proposed by introducing low-density phase-change properties of thermoplastic starch (TPS) with bionic design of glass sponge skeletal structure. Force analysis and finite element analysis (FEA) methods are applied to optimize the bioinspired structure. Combining with a pneumatic soft actuator, a wide-range stiffness-tunable omnidirectional-bending soft actuator (WOSA) with wide stiffness range is designed. Experiments are conducted to test its stiffness performances, such as the bending and torsional stiffness and variable stiffness response. Its applicability is also verified by module assembly robots.
Design of the Stiffness-Tunable Mechanism
Bionic design principle
The glass sponge skeleton exhibits advantages in lightweight, high stiffness, and toughness. It is a porous thin-walled cylindrical cage. The vertical and horizontal struts are interwoven together to form many basic square lattices, which are reinforced with diagonal struts. The specimen (collected from Hainan Province, China) and its lattice cells are shown in Figure 1a.

Bionic design principle.
The TPS exhibits advantages in low density, good machinability, and wide modulus range. It has a low density of 1.17 g/cm3 and operation range from rubbery state at room temperature to viscous state at ∼60°C, as shown in Figure 1b. It can achieve both good softness similar to human tissues at viscous state and high stiffness at room temperature.
By combining their advantages, a lightweight mechanism is developed. As shown in Figure 1c, the mechanism uses a simplified bioinspired design of glass sponge with less number of grids for it can be easily fabricated to a thin-wall shape and integrated into a cylinder soft actuator.
Thermomechanical test of TPS
The elastic modulus at different temperature of TPS is measured by a self-made tensile testing platform, as shown in Figure 2a. The specimen is stretched, and its elongation is measured by a grating ruler (Heidenhain, accuracy: 0.1 μm). A Pt100 sensor (range: −60 to 200°C, resolution: 0.2°C) and a thermostat are used to read the temperature and control the heating process.

Tensile test of the TPS specimen.
Results are shown in Figure 2b. The elastic modulus of the TPS is continuously reduced from 380 to 0.03 MPa during the heating process from 24°C to 60°C. The tensile rate of the specimen increases sharply at 58°C, which is 182.8%. It is inferred that the TPS material enters the viscous state around this temperature.
Analysis and optimization
As shown in Figure 3a, the glass sponge skeleton is composed of two kinds of staggered grids, octagon and interlaced fence structure. It can be observed from the diagram that the thickness of the three struts is different, and the vertical strut is obviously thicker than the horizontal and diagonal struts. The size of the three struts may follow a certain rule. In the following contents, force analysis and FEA are conducted to optimize the structure and size for achieving better bending stiffness properties, which are different from Fernandes et al. 32

Bionic design and optimization of the glass sponge skeleton:
Strut proportion
When the glass sponge is compressed or bend, grids are mainly suffering the axial compression/stretching due to their small size. Force analysis is conducted on the two adjacent grids, as shown in Figure 3b. Assuming that the grid is compressed uniformly, the four fulcrums at the top of the grid are suffering the same force. The forces on the vertical, diagonal, and horizontal struts denote as F1, F2, and F3, respectively. According to the geometric relationship, it can be obtained
When the cross-sectional area ratio of the three kinds of struts is the same with the force ratio, the stress of each strut is equal in theory. The structure can exert the best force-bearing effect. The strut proportion is used in the following simulation works.
Grid configuration
As shown in Figure 3b, the diagonal struts intersect the horizontal struts at 45°, and the distances between the intersection point and the vertical struts are a and b. A total of 121 structures are analyzed with different combination of a and b (from 0 to L at 0.1L intervals). It is conducted in ANSYS Workbench for static analysis. The material is set as Young's modulus E = 380 MPa, Poisson's ratio λ = 0.3.
Results are presented in Figure 3c. Among them, structure I is the octagonal grid structure, while structure II (a = 0.5L, b = 0.5L) and III (a = 0, b = L or a = L, b = 0) are the local optimal values. Simulation results of these three structures are conducted in Figure 3d. Bending stiffness of structure III is 14.4% higher than structure I and 5.4% higher than structure II. The structure I most similar to glass sponges performs the lowest bending stiffness. It might be caused by the different kinds of grids, of which the weaker one determines the minimum stiffness, as the Cannikin's law. The grid configuration of Structure III is selected for the next optimization.
Strut size
As shown in Figure 3e, the cross-section of the vertical strut is a sector ring, and the angle is assumed as α. Ten structures are analyzed from α = 4° to 40° at equal intervals. A silicone coat is designed to prevent leakage of the viscous TPS. Nevertheless, viscous TPS would cause inflation of the silicone coat by hydrostatic pressure. It should be optimized within a small value to reduce the impact of material flow. Simulation work is conducted in ABAQUS. A hyperelastic Yeoh material model with strain energy W = C1(I1–3) + C2(I2–3) is used to capture the nonlinear material behavior of the silicone coat (Ecoflex 00-50; Smooth-On). Parameters of C1 = 0.0128 and C2 = 0.00105 are derived from measuring three specimens in the strain range of 0–250%.
Figure 3f shows two results. There is a small inflation with α = 16° and an obvious inflation with α = 40°. The bending stiffness of the TPS mechanism is also conducted in the stiff mode, as shown in Figure 3g. The smaller the deformation, the higher the bending stiffness. Final results are compared in Figure 3h. As α increases, the bending stiffness at stiff mode continuously increases, while its stability decreases in soft mode. The inflation of the silicone coat is also increasing at soft mode, leading to a growing shape change. The angle α is designed to 16° for balancing the stiffness and the shape retention ability.
The bioinspired TPS mechanism
A stiffness-tunable mechanism is fabricated with the optimized proportion, configuration, and size. It is 75 mm in length, 14 mm in outer diameter, and 1 mm in thickness. As shown in Figure 3i, the mechanism weight of only 2.12 g can hold 1 kg weights at the distal end in cantilever state. The LWR is over 470. The good potential can be seen to achieve high specific stiffness by combining bioinspired design with phase-change materials.
Design of the WOSA
The WOSA is carefully designed to achieve wide stiffness variation range and omnidirectional bending. As shown in Figure 4a, it is composed of silicone body, stiffness-tunable mechanism, carbon fiber heating wires, and central limiting layer. The central limiting layer is used to limit the axial elongation of the actuator. Three elliptical chambers are symmetrically arranged to achieve omnidirectional bending. Carbon fiber heating wires are symmetrical spiral winded to limit the radial expansion of inner chambers and heat the stiffness-tunable mechanism.

The omnidirectional bending actuator:
A WOSA and a same-sized pure soft actuator (PSA) are fabricated to quantify the differences caused by integrating stiffness-tunable mechanism, as shown in Figure 4b and c. Parameters of the TPS mechanism and the two actuators are introduced in Table 1. Bending performances of the actuator can be seen in Supplementary Material S1.
Parameters of the Fabricated Actuators
PSA, pure soft actuator; TPS, thermoplastic starch; WOSA, wide-range stiffness-tunable omnidirectional-bending soft actuator.
Bending Stiffness Modeling
Analytical model is established to describe the bending stiffness of WOSA. As shown in Figure 5a, three elliptical chambers are symmetrically distributed with a center distance c between ellipse and actuator. The length of semi-major axis and semi-minor axis is a and b, respectively. The neutral axis is assumed with a deflection angle of φ.

Stiffness modeling of the WOSA.
The bending rigidity of the actuator is mainly from the silicone body and the stiffness-tunable mechanism. It can be obtained by
Where KA is the bending rigidity of the actuator. ES and ET are the elastic modulus of the silicone and TPS, respectively. IA and IT are the inertia moment of the actuator and TPS mechanism, respectively.
The TPS mechanism is a porous thin-walled cylindrical topology structure. The unequal cross-section makes it difficult to calculate its inertia moment by mathematical methods. However, the structure is composed of uniformly distributed grids, which are supposed to be evenly deformed. A proportional coefficient μ is introduced to characterize the bending stiffness relationship between the porous structure and the same sized closed cylindrical structure. It is verified in finite element simulation, and the coefficient μ is 0.264. Then the IT can be obtained by
Where DT is the outer diameter of TPS mechanism, and dT is the inner diameter.
As shown in Figure 5a, the IA can be obtained by
Where I1, I2, and I3 are the section inertia moments to the neutral axis of the three chambers.
The sectional moment of inertia of the ellipse can be calculated by the following:
Where Ix0, Iy0, and Ix0y0 are the sectional moment of inertia of the ellipse relatively to the semimajor axis, the semiminor axis, and the origin, respectively.
According to the parallel axis and rotation axis theorem of the sectional moment of inertia, the sectional moment of the inertia of the chambers relating to the neutral axis can be obtained by
As shown in Figure 5b, the bending stiffness of the actuator is measured by the ratio of external force F to the caused displacement d. Considering the large deformation of soft actuator, the piecewise constant curvature method is used to assume the deformation of the actuator under the force F. The length of central axis is L. The bending angle is θ. Relationship between force F and bending angle θ can be described as
By substituting Eqs. (2), (3), (4), (5), (6) into (7), the bending stiffness of the actuator K can be established as Eq. (8).
Experiments and Discussion
Bending stiffness property
Figure 6a exhibits the experiment platform for bending stiffness measurement. The actuator is fixed on a 3D-printed base. A Pt100 sensor (Heraeus Co. Ltd.) is attached to the TPS structure for measuring its temperature. Heating process is controlled by the thermostat. A force gauge is fixed on the screw slide to push the actuator to deform, and the forces are recorded at 1 mm intervals from 0 to 10 mm. The bending stiffness is measured from 24°C to 60°C.
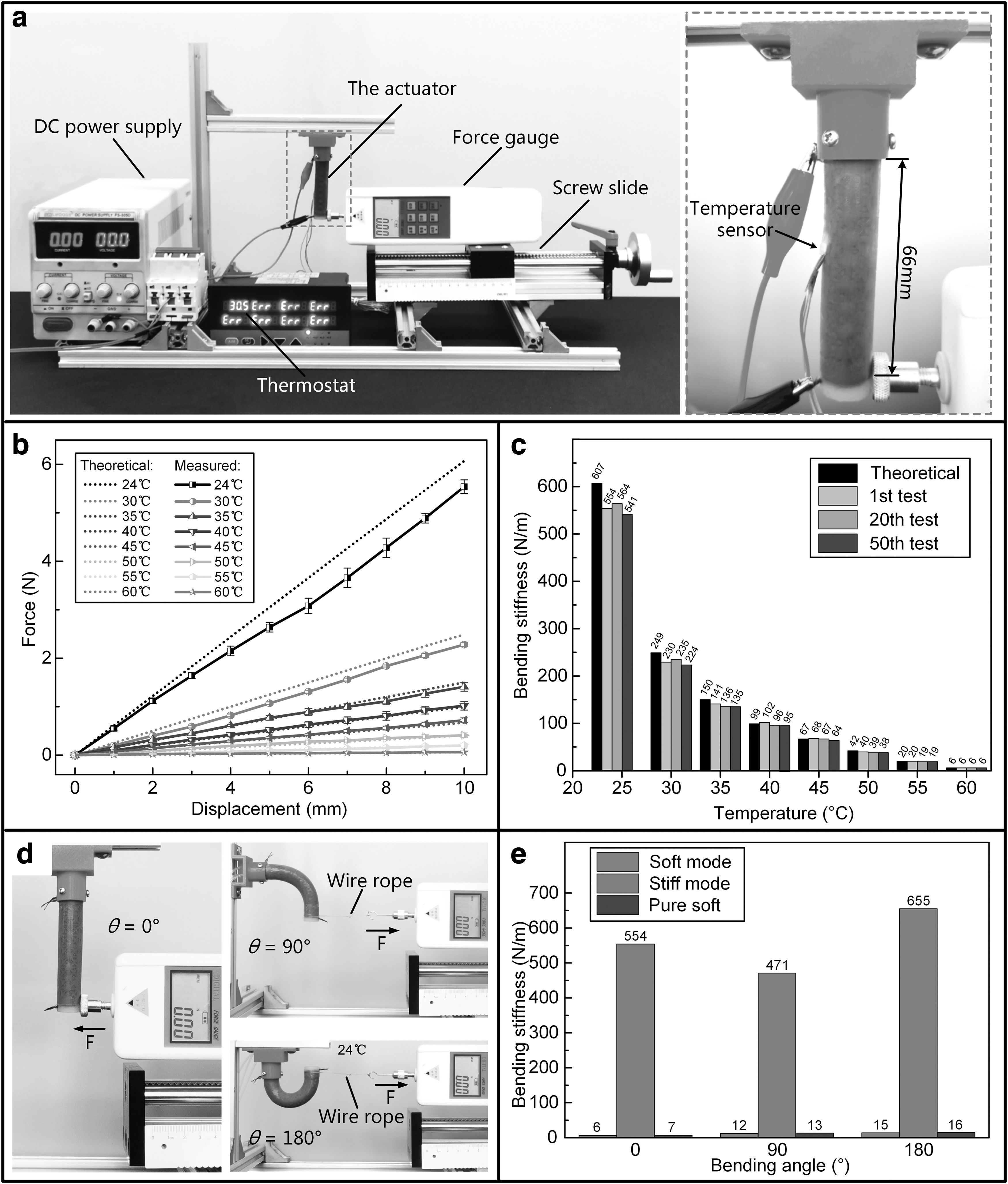
Bending stiffness performance test:
Experimental results are compared with theoretical values, as presented in Figure 6b. Table 2 lists the values of parameters used for numerical solutions. Theoretical calculation shows that the WOSA can achieve 101 times bending stiffness range from 6 to 607 N/m, while the measured results show ∼92.3 times range from 6 to 554 N/m. The maximum error is within 9%. Considering the inevitable measurement errors, the effectiveness of the bending stiffness modeling can be verified.
Parameters of the Wide-Range Stiffness-Tunable Omnidirectional-Bending Soft Actuator
Repeated experiments are conducted to test a single WOSA. In every cycle, the actuator is heated to 60°C, kept for about 3 min, and cooled to normal temperature. The 1st, 20th, and 50th test results, as well as the theoretical value, are presented in Figure 6c. The fluctuation is within 7%. The results show good repeatability in bending stiffness of the WOSA.
Comparative experiments are also conducted on the WOSA and PSA. As shown in Figure 6d, the stiffness is measured at stiff mode (24°C) and soft mode (60°C) with three different bending angles. Results are presented in Figure 11e in Supplementary Material. The stiffness of WOSA is 554 N/m (0°), 471 N/m (90°), and 655 N/m (180°) at stiff mode, while it is 6 N/m (0°), 12 N/m (90°), and 15 N/m (180°) at soft mode. Besides, it is even slightly lower than the PSA at soft mode. It can be seen from the results that the WOSA can achieve wide stiffness variation range with pure soft properties remaining.
Torsional stiffness property
Torsional stiffness is also required in achieving stable operation. The TPS mechanism is tested in a torsion testing instrument (ND-100, Changchun Kexin testing instrument) at room temperature. The results are shown in Figure 7a. The measured value is 8.70 N·mm/deg when the torsional angle is no more than 10°.

Torsional stiffness test.
Torsional stiffness of WOSA at different temperature is measured by a self-made platform, as shown in Figure 7b. The actuator is vertically fixed on a rotating platform. Its top end is connected with a bearing to ensure that the central axis does not shift. The probe of the force gauge is contacted with the 3D-printed base and 11 mm away from the rotation axis. When the bottom rotating platform rotates at a certain angle, the force can be read by force gauge. The torque can be derived by multiplying the force and rotation arm.
Three WOSAs are used for testing, and results are shown in Figure 7c. The torsion stiffness of the WOSA is 8.49 N·mm/deg at 24°C and 0.12 N·mm/deg at 60°C, which is about 70.8 times variation range. The PSA is also measured, and the torsional stiffness is 0.13 N·mm/deg.
Repeated experiments of torsional stiffness are conducted to test a single WOSA. In every cycle, the actuator is heated to 60°C, kept for about 3 min, and cooled to normal temperature. The 1st, 20th, and 50th test results are shown in Figure 7d. The fluctuation is within ∼8%.
From the above results, it is demonstrated that the WOSA can achieve wide torsional stiffness range of about 70.8-folds, as well as good repeatability.
Heating and cooling response
The response time of heating and cooling process of the WOSA was measured for estimating the temperature to achieve open-loop control. The test platform is presented in Figure 6a.
Heating processes were recorded from room temperature to about 60°C. Results are shown in Figure 8a. When the voltages are 15, 20, 25, 30, and 35 V, the average response time is 127, 83, 52, 38, and 28 s, respectively. The heating process can be shortened to <1 s by applying 220 V AC. But it is not safe in some occasions.

Variable stiffness processes of the WOSA.
Cooling processes were recorded by both natural cooling and wind cooling methods. The cooling air was provided by a mini fan (power of 20 W). Results are shown in Figure 8b. The natural cooling takes about 4 min, and the wind cooling takes about 3 min. The response is slow, but it can be easy to estimate and control the temperature. In the future, designing microcooling channels may be an important research work to achieve faster response.
Experiments on WOSA module-integrated soft robots
Gripper with three WOSAs
The gripper is assembled by three WOSAs and a 3D-printed PLA base, as shown in Figure 9a. Actuators are symmetrically distributed with a distance of 60 mm.

Experiments of the gripper assembled with three WOSAs
The gripper at soft mode can safely grasp various fragile and vulnerable objects, such as the unshelled raw egg, boiled egg yolk, bulb, and fresh egg (Fig. 9b–e). The softness, compliance, and interaction security of the WOSA are demonstrated by these tasks.
Objects with different shapes and weights are also tested, such as the cuboid glasses case, wire bundle, and grape bunch (Fig. 9f–h). It is much difficult to grasp the grape bunch for its heavy weight, soft body, and unstable shape. The gripper is required to be softly touched and get stiffened to complete this task. Adaptability and stiffness-tunable ability are demonstrated in these experiments.
It is much difficult to lift the grapes weighting 0.61 kg, for the grapes are easily dropped by external force. The gripper is required to be softly touched and adaptive to the irregular shape of the grapes. Compliance and adaptability are demonstrated in these experiments.
The load capacity is verified by lifting a 3.32 kg dumbbell through tuning stiffness (Fig. 9i). The gripper deforms at soft mode and takes about 3 min to get stiffened to successfully accomplish the lifting work. Large load capacity and wide range stiffness tuning ability are demonstrated in this experiment.
The gripper experiments can be viewed in the Supplementary Video S1. It can be verified that the WOSA has a wide stiffness variation range and can achieve both high compliance, softness, and interaction security at soft mode, as well as large load capacity at stiff mode.
Soft manipulator
Soft robots have great potential in the field of minimally invasive surgery (MIS).33–35 However, weak stiffness has made it difficult to achieve stable surgery operations. The WOSA exhibits a wide stiffness range, small size, and omnidirectional bending ability, which may provide a possible solution. An experimental platform (Fig. 10a) is built to conduct the simulative surgery. The manipulator is assembled by two WOSAs, several 3D-printed connectors, and a blade in serials (Fig. 10b). The total length is 246 mm, and the maximum outer diameter is 22 mm. A linear slide is used to move the manipulator in the vertical direction. The manipulator can enter the transparent acrylic box through a 24 mm hole. The silicone heart is fixed in the box.

Experiment on the manipulator.
The whole surgical processes are presented in Figure 10c. The manipulator moves down and bends with a large curvature to bypass the heart (Fig. 10c-1–c-3). When its end tool reaches the target place, the manipulator is cooling down to get stiffened (Fig. 10c-4–c-5). Finally, the resection is completed by moving and rotating the manipulator at the rod above the box (Fig. 10c-6). The processes can be viewed in the Supplementary Video S2.
The successful accomplishing of this task has demonstrated the possibility in future surgical applications of the WOSA due to its ability to achieve large curvature bending motion in a confined space and high stiffness to transmit large force/torque.
Conclusion and Future Works
A lightweight stiffness-tunable mechanism is proposed by combining bionic high-stiffness structure design of deep-sea glass sponges and low-density phase-change property of TPS. It is optimized in the proportion, configuration, and size of the structure. The fabricated stiffness-tunable mechanism weighting 2.1 g exhibits a large LWR, which is exceeding 470.
The WOSA is realized based on the TPS mechanism. The bending stiffness modeling is verified for the small error within 7% between the measured and theoretical values. Comparative experiments on stiffness are also conducted with a same sized PSA. Results show that the WOSA can achieve 92.3 times initial bending stiffness variation range from 6 to 554 N/m, as well as 70.8 times torsional stiffness variation range from 0.12 to 8.49 N·mm/deg. Its stiffness at soft mode is even lower than the same sized PSA. Fifty-cycle experiments are also conducted on WOSA. Results show good repeatability on the bending and torsional stiffness of the WOSA. Furthermore, a gripper with three WOSAs and a MIS manipulator are developed to verify the performances and applicability of the actuators. Results show that the gripper can adjust stiffness to grasp and lift various objects with different fragility, shape, size, and weights. Especially, it can grasp the unshelled fresh egg, the boiled egg yolk, and a branch of grapes without damage and also successfully lift a 3.32 kg dumbbell through variable stiffness. Finally, the large curvature omnidirectional bending and wide-range stiffness tuning abilities are demonstrated by the manipulator, which can successfully accomplish the tumor resection work from a silicone heart in a confined space. It may be useful in future MIS applications.
In the future, we will focus on optimizing the structure design of the actuator to achieve better comprehensive performance of the response, deformation ability, compactness, and variable stiffness range.
Footnotes
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.