
Abstract
Biomimicry of the stomach's peristaltic contractions can be challenging in the design, modeling, and control of a soft actuator. The mimicking of organ contractions advances our knowledge of the digestive system and analyzes the biological behavior by testing with a physical robot. This article proposes a ring-shaped soft pneumatic actuator (RiSPA) as a segment of the digestive tract. RiSPA is made of a ring frame with embedded bellow actuators that generate contractive motions. An embedded sensory system measures the contraction using range sensors. The kinematics and dynamics of RiSPA's contraction are modeled and simulated, while a state feedback algorithm is applied to them. The simulation results are validated experimentally by comparing the RiSPA measurements with desired applied signals. The proposed actuator provides controllable symmetrical and asymmetrical contractions analog to the human stomach. The results of RiSPA validate the prediction performance of the simulation and controller with applied sinusoidal signals as a peristaltic wave. RiSPA contractions can be applied to a broad range of applications, such as imitating the esophagus and intestine contractions.
Introduction
The human muscular system has been an inspiration for developing new soft robotic concepts. Skeletal muscles (e.g., biceps muscles) have been investigated intensively in soft robotics to present novel soft actuators that serve applications that require prismatic movements.1,2 However, smooth muscles that generate radial contractions have received less attention in soft robotics. The peristaltic motions are propagating contractions on tubular organs' walls that enable three essential tasks: mixing, grinding, and emptying the food contents. 3 The challenge of developing a peristaltic motion is to develop soft ring actuators that largely contract similar to the biological example. 4 Ring actuators are beneficial for various applications, including industrial pumps, 5 biomedical pumps for simulating the swallowing process, 6 and simulating organs that generate contractions similar to the stomach 3 and intestine. 7 A swallowing robot provides a test environment to address the problem of stent migration in ill patients, 8 whereas a stomach robot serves food technologists for testing and analyzing newly developed food and medicines. 9 In fact, as an in vitro simulator, a robotic stomach provides a platform to evaluate the transformation process of pharmaceuticals and gastric contents under various physiological conditions.
Few investigations have been carried out to emulate and examine the radial contraction by soft actuators. This actuation is unusual and challenging to produce with current robotics techniques. Dang et al. created a ring actuator for gripping applications. 4 The soft actuator was modeled and validated, which achieves a small contraction compared with the actual stomach. 10 The constrictive motion of organs such as the esophagus and intestine were investigated to provide a soft ring actuator that mimics their contractions.11,12 Different methods and materials were used to construct such actuators, but the soft pneumatic actuator (SPA) was widely used in this perspective. For example, Dirven et al. constructed a tubular SPA to simulate the contraction of the esophagus. 11 The air cells of this SPA inflate to produce an internal contraction when pressurized. The same actuation technique was employed in intestinal modeling to study the soil consumption (geophagy) behavior. 12 Four different designs were proposed to simulate the contractions of the stomach and tested by finite element analysis methods. 13 The studied actuators were not able to provide large contractions. An industrial pump inspired by the intestine tract was created to move rocket fuel by peristaltic contractions. 5 The diameter and the shape of the pump simulate the intestine, and they are relevant to the esophagus morphology but do not suit the stomach application.
The available soft ring actuators in soft robotics have not fulfilled the design and control to accomplish a large contraction that can realistically simulate stomach contractions. A small number of soft stomach simulators have been proposed to emulate stomach activity.9,14,15 However, these robots focus on the stomach's overall behavior, ignoring the geometry and contraction specifications of the antrum (the lower portion of a stomach), where the largest occlusion occurs. In response to this gap, a ring-shaped SPA (RiSPA) is introduced, representing a segment of the antrum. RiSPA should achieve a large contraction that can be compared with the biological example. The actuator is entirely soft, formed from composite silicones. In the previous study, a bellows-driven SPA generating a large displacement inspired by the smooth muscles was designed. 16 These actuators were fitted in a ring frame to perform a preliminary test of contraction. The concept and materials are adopted here to construct RiSPA from multi-SPAs embedded in a soft frame. To achieve a large contraction, we calculated the number of multi-SPAs required in RiSPA. The displacement of each SPA was measured in real time by the same range sensor (RS) presented in the previous study, 16 which detects the distance between the bellows and the sensor base by measuring the intensity of the reflected light. In RiSPA, embedded off-the-shelf RSs measure the range of contractions. The sensory system also enhances the reliability and control functionality in RiSPA. This sensory system is a solution for an enclosed soft robot and suitable for control purposes. Moreover, it provides a portable solution with a miniature size compared with the state-of-the-art vision sensors such as Vicon motion capture systems.
Besides the development, the performance model of RiSPA is another challenge presented in this article. The modeling of soft actuators enhances their controllability and defines their behavior. 8 Soft robotics' modeling is challenging, mainly due to the absence of first principles that can explicitly represent their deformations. 17 For the modeling of contraction movements in the soft robotics field, various strategies were examined, including continuous models (FEM and FDM), 18 machine learning techniques, 19 or discrete elastodynamics models representing the actuators based on a strain–stress perspective and lead to partial differential equations (PDEs). 20 However, in complex geometries, finite element analysis methods require a large amount of data to process and a long execution time. Case et al., through various experimental tests, demonstrated that specific elastomers such as EcoFlex-0030, function similarly to viscoelastic materials, which possibly can be modeled by springs and dampers. 21 Hashem et al. suggested a viscoelastic model for a bellows-driven SPA represented as a set of ordinary differential equations (ODEs). 16 Luo et al. used ODEs to model the dynamic of a pressure-operated soft snake robot (made of EcoFlex-0030) and verified it through experiments. 22 Unlike PDEs, ODEs rely on a single independent variable, turning easily to the state-space form, and there are multiple suitable control designs for them. Although the viscoelastic model successfully predicted the behavior of SPA, it lacked the inertia effects for control purposes. In this study, inertia effects were considered, which leads to a mass-spring-damper (MSD) model.
The RiSPA model had been equally broken into decoupled concentrated masses. Each mass represents a linear bellows-driven SPA, where the linearity was examined in the previous study. 16 These masses were attached to translational linear springs and dampers to present an MSD system as a set of ODEs. This approach gives a better understanding of the contraction behavior and is a suitable structure for closed-loop control methods. For control objectives, a static gain matrix as an offline control scheme is employed. This method is obtained through an algebraic Riccati equation, and then it can be applied recursively to the dynamic system.
The contributions of this study are the conceptualization, design, fabrication, and control of a novel soft robotic ring actuator. The novel concept was introduced to overcome the large contraction challenge in soft ring actuators, which had not been presented previously. Also, the sensory system offers an embedded technique to measure the contractions. RiSPA's dynamics modeling was introduced and employed for designing a control law and prediction of its behavior. The dynamic performance, sensory system, and simulation results were validated through experimental tests. This study applies also to other related research in the soft robotics field.
RiSPA Design and Fabrication
The RiSPA concept was inspired by a segment of the general structure of the gastrointestinal (GI) tract 23 as shown in Figure 1a. This segment shows the influence of smooth muscles that cause the lumen to contract through the lumen membrane. As can be seen in Figure 1a, the lumen does not contract uniformly. Instead, the membrane exhibits folds during contractions. These folds are known as the gastric folds in a stomach or circular folds in a small intestine. The gastric folds present resiliency by enabling the stomach to expand outward without increasing lumen pressure. 24

The concept design of RiSPA.
RiSPA was proposed to resemble a lower part of the stomach segment, known as the antrum. Figure 1b presents how RiSPA simulates the smooth muscles with soft actuators (bellows). The gastric folds that occur in the contracted lumen are also reproduced in RiSPA by identifying how many SPAs can be embedded in a ring frame. The contraction of RiSPA achieves a response analogous to the GI general segment. Figure 1c shows a single SPA developed previously,
16
and compares it with the proposed RiSPA components in Figure 1d. To translate the displacement of SPAs into contractions, we designed a ring-shaped frame and soft layer for RiSPA. The contraction of RiSPA can be defined by the occlusion ratio, which is
The antrum has an average diameter of 50 mm when fully relaxed. 16 The occlusion ratio of the antrum was simulated between 80% and 90%,15,25 whereas a medical study reported 100%. 10 The shape of the contractions is asymmetrical, as shown in Figure 1a. This study performed a maximum contraction of 80% with a symmetrical shape and 100% with an asymmetrical shape, as shown in Figure 2. To achieve both shapes we commanded all bellows simultaneously to contract as denoted by ɛs for symmetrical occlusion, whereas we chose a single bellows to contract longer than the other bellows as denoted by ɛa for asymmetrical occlusion.

The identification of the required numbers of bellows' actuators in RiSPA. The concept of fully actuated symmetrical and asymmetrical RiSPA. Dr, and Dc are the minor bellows' diameters where it is attached to the soft layer (Bd), and the variation of bellows' elongations is (ɛs). ɛs influences the occlusion ratios in RiSPA by altering Dc. Those displacements can be translated in RiSPA to an occlusion ratio between 0% and 80%. When SPAs are symmetrically fully actuated in a ring frame, Dr can be assumed as a uniform circle, whereas Bd is assumed to be a chord in Dc. Therefore, the number of SPAs in a ring frame is equal to the maximum number of chords fitted in Dc. The quantity of chords in a circle requires the value of θ. Then, Bd is determined by dividing the total circle degrees by θ degrees. Color images are available online.
As the maximum symmetrical occlusion required from RiSPA is 80%, it is necessary to determine the number of SPAs to achieve the occlusion without overlapping SPAs. The number of SPAs in RiSPA can be defined mathematically as shown in Figure 2. Note that although the soft layer covers the bellows, the small thickness of 1 mm does not affect Bd. Also, when SPAs are fully actuated, the soft layer stretches and the thickness decreases gradually. The effect of the soft layer thickness was ignored in this study. The calculated maximum number of SPAs that were fitted in RiSPA is five. The asymmetrical actuation was similar to the symmetrical method but with altering one SPA to displace longer (25 mm) than the other four SPAs (20 mm). In this case, we hypothesized that RiSPA can asymmetrically accomplish an occlusion ratio of 100%.
Illustrations of the three-dimensional (3D) design and fabricated parts are shown in Figure 3. The dimensions of RiSPA were chosen to simulate a segment of the stomach antrum with the support of our previous study on the simulation of the smooth muscles. 16 The soft layer has a 50 mm diameter, 30 mm width, and 1 mm thickness. The frame has a 52 mm inner diameter, 20 mm width, and 15 mm thickness. The frame thickness was chosen to accommodate the bellows when fully retracted (15 mm). We used the same bellows as described in the previous study. 16 The length of the bellows is 35 and 15 mm when fully retracted. The diameter of the bellows is 10 mm. RiSPA's design was modified from the previously developed SPA in the frame and the bellows base. The sensor and the bellows were fitted in a separate package (RS and bellows base). This package was attached to the frame. RiSPA was assembled by gluing the parts together with silicone glue in four steps, as shown in Figure 3. The fabricated RiSPA was then connected with pneumatic tubes and I2C wires in the RS base.

The fabrication process of RiSPA. On the top side, modeling and casting three parts: RiSPA frame, soft layer, and RS and bellows base. The molds are designed in the software CREO (PTC) and parts are constructed by 3D printers (polylactic acid filament [PLA material]) and laser cutters (acrylic material). On the middle assembling and gluing of the RiSPA by four steps: (1) the open side of the five bellows are glued with the opening in the RS base, (2) the soft layer is glued to the outer sides of the RiSPA frame, (3) the top of the bellows are glued to the soft layer, (4) the RS bases are glued to the RiSPA frame. The fabricated RiSPA has air channels engraved in the RS bases, and pneumatic tubes are glued into them. PDMS (Sylgard 184 Dow corning) material is chosen for casting RiSPA and RS base, and silicone rubber Ecoflex-0030 mix with a slacker (Smooth-On, Inc.) of a ratio of 1:1:0.5 (part A, part B, and slacker, respectively) for the soft layer. The liquid silicone is injected into the molds through injection channels. 3D, three-dimensional; PDMS, polydimethylsiloxane; PLA, polylactic acid; RS, range sensor. Color images are available online.
RiSPA Dynamics Modeling
To model the peristaltic motion, a RiSPA is assumed to be actuated by n independent and identical SPAs, as a set of MSDs. The soft layer interactions between adjacent SPAs were ignored because of the thin profile of 1 mm and the angular distance between each SPA of 72°. In addition, the hardness of the bellows (60 Shore A) is much more than that of the soft layer (00–30). Therefore, the effects of coupling were ignored, and the model was considered decoupled. Also, previous study presented results supporting the linearity of the bellows-driven SPA. 16 To uniquely determine the position of ith-SPA, a proper coordinate system is required. According to RiSPA's shape, each local coordinate (x−y) needs to be transformed to a fixed coordinate (X − Y) at the center of the ring (Fig. 4).

To describe the motion of the system, we defined a set of independent generalized coordinate vectors
in which
By defining the state variable vector as
Employing the state-dependent coefficient parameterization technique, Equation (3) can be rewritten into the state-space realization
where
RiSPA Contraction Control
RiSPA can track the desired contraction profile up to a full occlusion. By applying the control signals (i.e., the generated pressure through proportional valves), the SPAs start contracting to reach the predetermined position and eventually stop at the end of the regulation process within a sufficient time interval. Besides, to control a recursive process similar to persistent peristalsis, which repeats continuously, a trade-off between the state regulation and the control effort is required. In fact, this trade-off is to compromise between the system performance (state errors) and the control cost. For replicating the peristalsis, the linear quadratic regulator (LQR) was designed. Since the LQR generates an offline static gain matrix, it is employed in many engineering applications. In the case of mimicking the peristalsis, the LQR regulated the error between state variables and desired values to zero (
To design the LQR for the LTI system similar to Equation (4), the pair of (
in which
where
where Equation (7) is calculated from the Hamilton Jacobi Bellman equation. 27 Through the Lyapunov principle, the proof of stability can be achieved readily.
Numerical Simulations
In this section, the LQR controller was applied to the proposed model numerically to imitate the contraction of the antrum. Since RiSPA resembles the antrum, it must be able to contract in different configurations. Also, as stated before, RiSPA can contract up to 80% symmetrically and 100% asymmetrically. Hence, both the symmetrical and asymmetrical contractions were simulated in this section.
In the following simulations, all the MSDs were considered identical, and the system is entirely symmetric. According to Figure 1, each mass has only one degree of freedom in the direction of the center of RiSPA. LQR's weighting matrices and the physical characteristics (Fig. 5) for the simulation are stated in Table 1.
Setup of the Simulation
RiSPA, ring-shaped, soft pneumatic actuator.
The state-space model of RiSPA was expressed in Equation (4), where n = 5 and

Numerical contraction results. The direction of moving ith-SPA is illustrated by black arrows. Each SPA starts to move from the outside edges of the polygon (fully retracted position) and contracts toward the desired position (red dashed lines).
Experimental Setup and Validation
The experiments were carried out using the electropneumatic setup shown in Figure 7a for symmetrical occlusion. For the asymmetrical occlusion, components 2, 3, and 5 were required for each SPA (Fig. 7a). The control program was written in LabVIEW (National Instruments) to control both retraction and contraction states. As the built-in pressure sensors have a small error of 0.5 kPa, the error was neglected. The calibration of the occlusion ratio of the actuators and the connected sensors was carried out with an electromagnet setup in Figure 7b (Polhemus Liberty). A tracker was placed on the tip of each SPA to record the contractions in centimeters. A conversion and data scaling were performed to synchronize sensor readings from RiSPA and the measurement from the electromagnetic source. The experimental results were obtained according to the flowchart in Figure 7c. The flowchart also illustrates that the desired occlusions are achievable by importing the simulation's control signals into the RiSPA's system. The offline LQR signals were generated from the numerical simulation of the model with the predetermined initial and desired positions. Then, the control signals were fed to the experimental setup (LabVIEW) and the output was captured by the sensory system. All experiments were repeated 10 times to realize the median and the standard deviation. Only the medians are presented in the following figures for simplification and clarity. The frequency of the recorded data is 20 Hz.

Experimental setup.
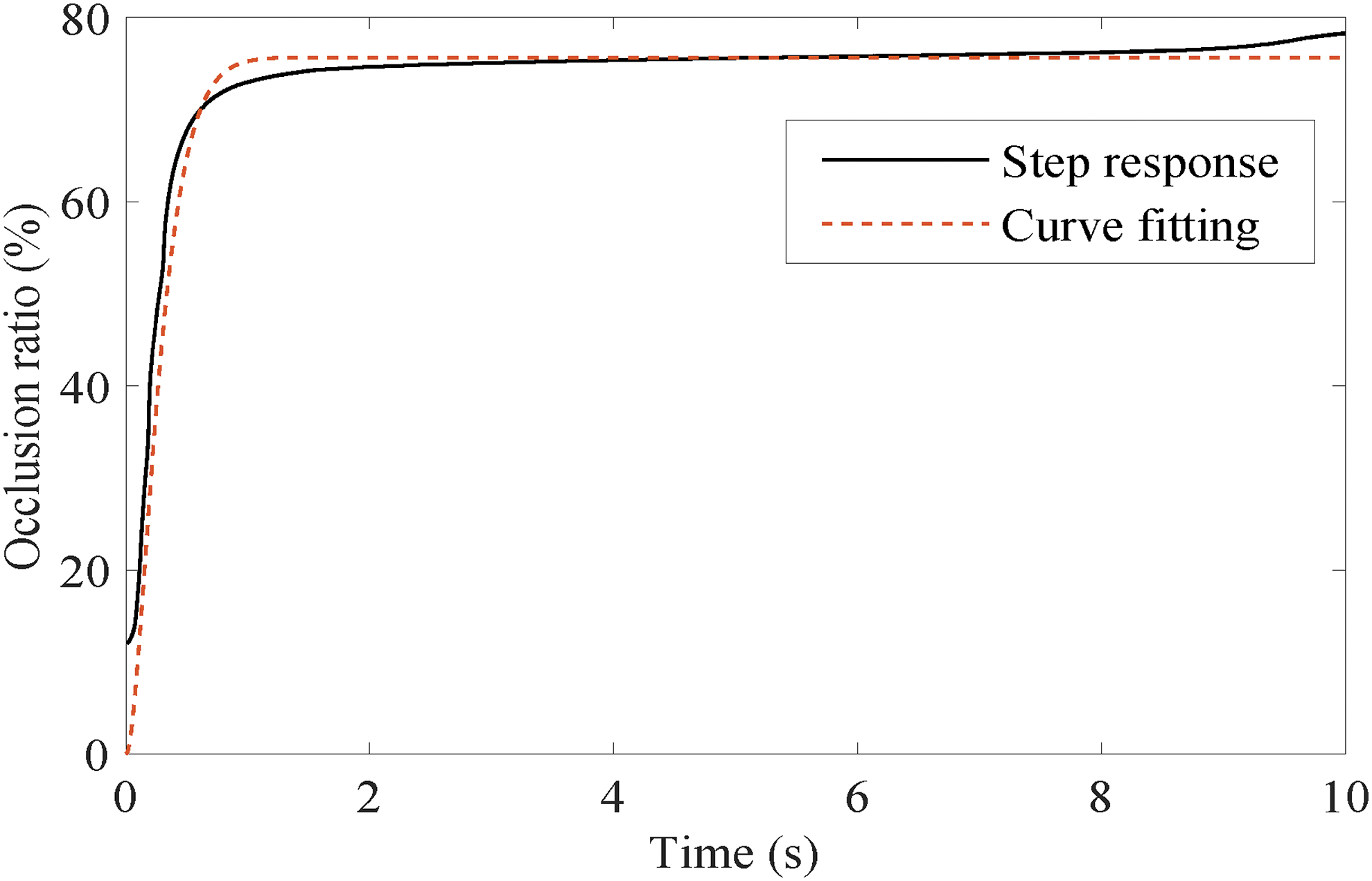
Figure 8a shows the occlusion ratio of an SPA undergoing a staircase of applied pressure from −80 to 140 kPa and an increment of 5 kPa for calibration purposes. The increment in Figure 8a was increased to 20 kPa for a simplified representation. The duration of step responses was 5 s to ensure an adequate settling time for the SPAs. To identify the overall occlusion ratio against applied pressure, we selected a data point from each step (every 4.9 s). Then, the standard deviation and the mean of all SPAs were calculated. The mean was then linearized in MATLAB with a curve fitting tool (cftool). Also, sensor readings were recorded following the same staircases. The first three steps of sensor data were unfiltered for illustration. Figure 8b shows the calibration of the five SPAs in RiSPA by plotting the applied pressure against the occlusion ratio. The occlusion deviation between the five SPAs is 8%, which is assumed a minor error in this study. The deviation is influenced by fabrication errors, such as parts assembling. From the result, the nonlinearity in the actuators occurs between −80 and −10 kPa. This behavior happens from the unfolding of bellows when they are fully retracted during the vacuuming state. In addition, SPAs are displaced about 12% when fully retracted under −80 kPa. Increasing the vacuum pressure cannot contribute to more retraction. Instead, the frame of RiSPA necessitates a design modification to adjust the offset. However, this research focused on large occlusion performances and neglected the occlusion ratio error between 0% and 35%.

The calibration of the actuators and sensors in RiSPA.
Figure 8c presents the calibration of each sensor in RiSPA by plotting sensor readings while SPAs were undergoing the staircases of applied pressure. The raw sensor readings were provided by the manufacturer called counts (cts). Thus, a measurement conversion from cts to occlusion ratio was required for the characterization. The transformation was performed by selecting a point from each step (every 4.9 s) to plot sensor readings against the occlusion ratio. The data were filtered in MATLAB by calculating the mean and eliminating data spikes. The sensors readings cannot provide unified measurements for all sensors; instead, each sensor requires a calibration. In fact, each sensor behaved differently depending on the RiSPA frame's clarity and other fabrication aspects. Similar to the SPAs, the nonlinearity occurs between 0% and 35%. The resolution of sensors is varied across the five SPAs. However, the sensors observe the contraction in every step increment.
Validation of symmetrical occlusion
The results in Figure 9 validate the proposed model and the applied control method on RiSPA for 40%, 60%, and 80% of symmetrical occlusions. The model can predict the occlusion ratio of RiSPA. The desired occlusions from the simulations and 10 repeated experiments on RiSPA are presented in Table 2. The occlusion ratio was measured with the calibrated sensor readings. A gridded platform (with 10 mm in each square) was fixed on the RiSPA background for illustration purposes. As the nonlinearity is high between 0% and 35% of occlusion ratio, the occlusion ratio of 40% by the simulation provides a high occlusion error of 7% in the experiment. However, 60% and 80% of the large occlusions produce a minor occlusion error with 1.5% and 1%, respectively. The occlusion responses in Figure 9 show a settling time of about 3 s. As the average speed of the stomach contractions is 2.5 mm/s, the time required from RiSPA to simulate the contractions is 4 s (the actuator width is 20 mm). RiSPA simulates a segment of the antrum contraction with similar gastric folds, average speed, and large occlusion. The validation of RiSPA demonstrates our hypothesis that a soft actuator can be controlled to a desirable symmetrical occlusion. The input signals employed in the experimental setup were generated through the model and the controller offline. Thus, by applying the control signals obtained from the model-based controller, actuators reach the desired positions as predetermined in the simulation results with an agreeable estimation.

The validation results of the model and the applied controller on RiSPA for the symmetrical contractions.
The Occlusion Ratio of Ring-Shaped Soft Pneumatic Actuator for Simulation's Results and the Average of 10 Repeated Experiments
Validation of asymmetrical occlusion
Figure 10 presents the results of the asymmetrical occlusions of arbitrary occlusion similar to the simulation (a and b) and full occlusion (c and d). The results confirm the simulation's capability to achieve asymmetrical occlusion to simulate an antrum. The arbitrary occlusion follows the simulation signals (a), and RiSPA results in a contraction shape similar to the simulation, illustrated in Figure 6b. The full occlusion of RiSPA was performed by applying the same pressure for four SPAs (80 kPa), whereas one actuator extended further to close the circle by applying a pressure of 140 kPa (Supplementary Movie S3). The results demonstrate that RiSPA can achieve a full occlusion asymmetrically to simulate a stomach's antrum. The simulation response is slower than the actuator, implying the model's estimated viscosity is high. The full occlusion of RiSPA can be applicable for relevant bio-mimicking applications such as simulating the intestine and esophagus behaviors. The minimal occlusion error of RiSPA's actuators presents a feasible actuator for the industrial sector, such as gripping functionality.

The validation results of the model and the applied controller on RiSPA for the asymmetrical contractions. The reference and the experiment's responses of the asymmetrical five SPAs are presented in
Validation of peristaltic trajectory
Figure 11 shows the results of signal tracking of a sine wave that simulates the peristaltic wave of a human stomach with a frequency of three cycles per minute and three different amplitudes (denoted by the occlusion ratio). The standard deviation of 40% occlusion is the highest with 8%, similar to the symmetrical results in Figure 9b. The results of 60% and 80% of occlusions are in very good agreement with the commanded signals presenting a standard deviation of 2.5% and 1.7%, respectively. RiSPA can track the peristaltic wave to simulate the behavior of the antrum. In the future, real-time control of RiSPA necessitates investigation to have an instant response to deal with uncertainties and unknown disturbances. Also, the methods and strategies of fabrication and designing the setup can be extended to form the living organ.

The applied trajectory signals of a sine wave, simulating a human stomach's peristaltic wave with three different occlusion ratios, 40%, 60%, and 80%, depicted in
Conclusion
A ring-shaped SPA that imitates the human stomach's contraction was proposed. The novel RiSPA was conceptualized, designed, and fabricated. The actuator was designed from soft composite materials and manufactured with a simple molding and casting process. Five linear actuators generating the contraction of RiSPA were fitted in a ring frame as they were mathematically identified from the specifications of the antrum. The five actuators were calibrated separately by abstracting points from a staircase of occlusion ratios. The maximum occlusion error between the five SPAs was 2.5%, which provides excellent results considering the fabrication error during the assembling process. Embedded RS provide a self-sensing capability to measure the contractions of RiSPA. They provided excellent results by following the actuator's occlusion ratios with a maximum deviation error of 3%.
An MSD model representing contractions of RiSPA was proposed. Applying the LQR to the RiSPA model, control signals were generated for both symmetrical and asymmetrical occlusions. The maximum symmetrical occlusion was limited to 80% due to the actuators' interaction and overlapping. The asymmetrical occlusion was more realistic to the biological behavior and achieved the full occlusion. The obtained experimental results indicated the ability and precision of RiSPA in performing the contraction motion under control signals with different occlusion ratios (40%, 60%, and 80%) for symmetrical contraction. The maximum occlusion error for 40% occlusion was 7% due to the high nonlinearity in the small occlusion range, whereas the occlusion error is 1.5% in the large occlusion range. The asymmetrical occlusion was also performed for a random and full closure of RiSPA. The asymmetrical shape of RiSPA showed similar behavior to the simulation. In addition, RiSPA tracked the commanded peristaltic waves with three cycles per minute and standard deviation similar to the symmetrical contractions. The experimental results also verified the proposed dynamical model and showed that this model was suitable for implementing offline state feedback control schemes such as LQR. The actuator design and modeling were applicable to other soft ring actuators that replicate smooth muscle contraction such as the stomach, intestine, and lower esophagus.
Footnotes
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.