
Abstract
The terrain adaptability of the state-of-the-art robot is far behind natural animals, partly because of limited sensing, intelligence, controlling, and actuating ability. One possible solution is to explore the flexible locomotion structure and locomotion mode with good adaptability and fault tolerance. Based on this idea, we presented a type of vibro-bot with arrayed soft legs (VBASL) with excellent terrain adaptability by utilizing the rapid vibration of the soft belt array. With the resistance to local terrain blocking and combing the vibrational actuation, the VBASL has an advantage of multi-leg collaboration, so that very simple structure can achieve good terrain adaptability, such as steady locomotion on complex terrains like steep slope, ladders, steps, discrete pillars, and soft sands. Besides, the effects of soft leg geometry, stiffness, and ground topography on terrain adaptability and locomotion speed were also studied, indicating the similar contact stiffness to maximize the locomotion speed on different grounds. Then, a theoretical model was developed to describe the experiments well, which can guide the design of optimum contact stiffness of VBASL to achieve fast locomotion speed and good load capacity. By further modifying the robot structure, more practical functions such as turning, climbing, and anti-impacting were easily realized. The resistance to local terrain blocking and optimum contact stiffness are two important factors to improve the performance of VBASL, which may address the terrain adaptability challenge of robots working in practical unstructured environments.
Introduction
Soft robots are rapidly developing through increasing the flexibility of the structure, where softness-induced inherent terrain adaptability can significantly decrease the structure and control complexity.1–4 Thus, soft robots working in different environments have been proposed, 5 such as the sand-adaptive bionic worm6–8 /inchworm9–11 /snake,12,13 obstacles-adaptive bionic starfish/octopus3,14–16 and jumping/hopping robots,9,17–26 and robots of climbing branches,27,28 crawling in snow, 29 crawling in vertical pipeline,30,31 climbing wall,32,33 passing through the slit and fast turning.34,35
Nevertheless, the terrain adaptability of these soft robots is still far behind the natural animals [e.g., the snakes are able to locomote on (in) rough ground/slope, sands and water, through narrow hole, and even climb tree], and one soft robot can only adapt up to two or three terrains (e.g., rough ground and sands). It is worth mentioning that the robots driven by external field (e.g., magnetic field36–45 ) demonstrates good terrain adaptability. However, owing to its dependence on the external field, the working space and environment may be limited.
In general, the legged-locomotion structure and locomotion mode exhibit good flexibility, seeming a promising way to adapt different terrains. For example, the flexibility of legs is beneficial to smoothen the disturbance from external environment without feedback control, whereas multi-leg collaboration provides robots excellent survival in different environments. 5 However, the multi-leg locomotion usually brings complex locomotion structure and mode. For example, to realize good terrain adaptability of legged robot, a leg usually consists of several joints and actuators, and each joint should be online and real-time controlled based on the terrain condition, which is very difficult for current soft robots.
Recently, the vibrational bristle robots have attracted wide research interest, where each bristle can generate a driving force under a single vertical vibration actuation, so that the locomotion structure and controlling are significantly simplified.46–52 The inherent deformability and fault tolerance of the large number of legs are expected to enable excellent terrain adaptability. But, until now such terrain adaptability was not seen in the practical applications, partly owing to the improper locomotion structure of bristle and stiffness that hinder its terrain adaptability and locomotion ability.
Given the abovementioned challenges, we systematically investigated a type of vibro-bot with arrayed soft legs (VBASL) and finally enabled its adaptability to more than five types of complex terrains (Fig. 2). A series of factors, such as the vibration exciting parameters, material and structure parameters of the inclined legs, load capacity, and terrain features, were comprehensively considered to establish a theoretical model for the locomotion, and further to reveal the underlying mechanism of the excellent terrain adaptability and locomotion ability. It was found the resistance to local terrain blocking and optimum contact stiffness are two important factors for designing high-performance VBASL.
Results
Terrain adaptability of VBASL
The fabrication of untethered VBASL with basic configuration are given in Figure 1A–D. As demonstrated in Figure 1C (or Supplementary Fig. S1), the untethered VBASL (total weight ∼6 g) is composed of a soft locomotion structure of inclined belt array, a thin lithium battery, a wireless controller, and two eccentric vibrator. For the tethered VBASL, the battery and controller can be removed for further decreasing weight (∼3 g).

Fabrication of the untethered VBASL of basic configuration (Brick-like):
Terrain adaptability of VBASL: locomotion on a steep slope of 42°
In principle, the vibration motor actuates the vertical vibration of the VBASL. Combined with the inclined structure, the friction force between the legs and ground is forward under downward vibration, and backward under upward vibration. Although the contact pressure under downward vibration is usually larger than that of upward, the forward friction force is larger to generate net driving force (Supplementary Note S2 and Supplementary Fig. S4). Further considering that all inclined legs can generate collaborative driving forces (Fig. 3), the VBASL holds great potential for locomotion in complex unstructured environments as few contacts between the inclined legs and ground can get sufficient interaction. Indeed, based on our analysis in the following content, the contact stiffness is an important parameter to determine the locomotion speed of VBASL on different terrains.

Locomotion mechanism of VBASL: High-speed camera (Photron Mini WX, LEICA Z16 APO; 10,000 fps) observations. Two VBASLs with different geometric parameters of the belt legs (θ, l, and d, refer to Fig. 1) are shown in
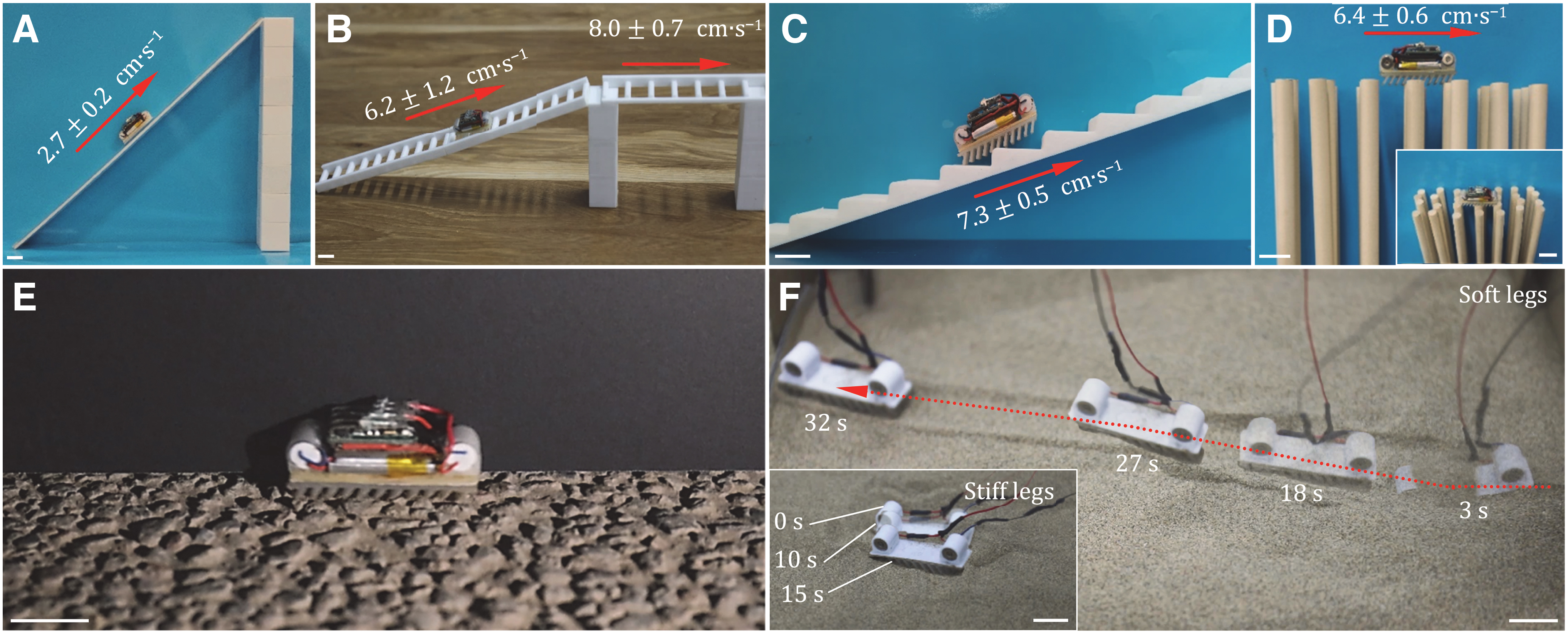
In our experiments, the VBASL can locomote steadily on a steep slope of 42° (Fig. 2A), ladders (Fig. 2B), steps (Fig. 2C), discrete pillars (Fig. 2D and Supplementary Movie S1) with large spacing, and stony ground (Fig. 2E and Supplementary Movie S2) with particle size comparable with the leg. A comprehensive terrain adaptability test demonstrated that the VBASL can quickly switch the locomotion states to adapt different terrains (Supplementary Movie S3).
Besides, a VBASL with relatively soft inclined leg (elastic modulus of the inclined leg ∼0.6 MPa) can steadily move on sand, even if the VBASL is trapped by sand (Fig. 2F and Supplementary Movie S4). Further studies showed the VBASL with stiff legs cannot move steadily on the stony road, which indicates that the contact stiffness between leg and ground may be crucial (more details refer to Discussion section).
Locomotion modes and performance
The VBASL with basic configuration is selected as an example to analyze its locomotion behaviors. In this study, we observed two locomotion modes, that is, sliding and hopping modes (Fig. 3 and Supplementary Movie S5).
In the sliding mode (Fig. 3A), the legs are in contact with the ground throughout, and the forward locomotion is accompanied by sliding on the ground, which usually occurred for relatively large weight, small leg stiffness, or weak actuation. In the hopping mode (Fig. 3B), the forward locomotion is accompanied by lifting from ground, which usually occurred for relative light weight, large leg stiffness, or strong actuation. However, too large stiffness will also hinder the locomotion, which is given in the Discussion section. The locomotion speeds (vx) in Figure 3A and B are 4.5 and 16.4 cm/s (Supplementary Movie S6), respectively; and their costs of transport 53 are 218 and 56 (current 0.18 A, voltage 3.10 V), respectively.
The relations of total mass (m), leg-ground contact stiffness along z-axis (k), and applied voltage on the locomotion speed (vx) are given in Figure 4.
The relations of the locomotion speed to m for different k are given in Figure 4A. In general, vx decreases with the increase of m owing to the decrease of vibration amplitude and increase of sliding friction, and the maximum loading capacity is measured as 100 g (Supplementary Movie S7 and inset of Fig. 4A). The data in Figure 4A also indicates that there should be an optimum stiffness (k = koptimal) for different m, that is, a too soft or too stiff contact stiffness shows poor locomotion performance (details refer Discussion hereunder). The contact stiffness and loading mass are two important parameters to determine the two locomotion modes [refer to Eq. (1) hereunder], and the VBASL can automatically switch from one mode to another to adapt the load bearing or external environments so as to further improve the adaptability of VBASL.

Locomotion speed of VBASL.
Furthermore, the locomotion speed linearly increases with the applied voltage (Fig. 4B), and the fastest locomotion speed was measured as 27.1 cm/s (∼8 body length per second). Note that the vibration frequency of an eccentric-rotor-based vibrator (ω) is proportional to the actuation voltage, and thus the results actually indicate a linear relation between vx and ω. It is surprisingly that resonant behaviors do not appear in the voltage-speed curves in Figure 4B, which is quite different from the traditional vibro-bots,54–56 and will be illustrated in Equation (2) and Supplementary Note S1.
Discussion
Theoretical model and optimal contact stiffness
To analyze the locomotion behavior and guide the subsequent optimization of the locomotion performance of VBASL on different terrains, a theoretical model is developed (Supplementary Note S1). Specifically, the locomotion speed of VBASL can be expressed as (Fig. 5)

where
According to Equation (1), one can approximately describe the effects of the stiffness, total mass and actuation on locomotion as
which agrees with the results in Figure 4 and indicates the absence of resonant behaviors. The locomotion mode trigger conditions in Equations (1) and (2) indicate that a stiffer locomotion structure is more beneficial to activate the hopping mode, but Equation (2) yields that a too stiff locomotion structure will greatly reduce the locomotion speed vx, which confirms the existence of the optimal stiffness koptimal. Indeed, the maximum normalized locomotion speed is obtained when sin α0 = 1 or λ = 1 [Eq. (1); Fig. 5], which determines the optimal stiffness for hopping mode (considering a given ω):
Note that, koptimal does not only represent the stiffness of the arrayed legs, it also includes the stiffness of ground (if the ground cannot be treated as rigid) or the effective stiffness of contacted legs for uneven ground. It is interesting that koptimal appears as an invariant parameter for the VBASL, that is, for given m, g, m0, and A0, the VBASL has a unique optimal stiffness independent on the geometrical and elastic properties of the legs (detailed discussion can be found hereunder and in Fig. 6). Furthermore, the same optimal contact stiffness is also found for different terrains with different contact status.

Effects of leg geometrical parameter (l) of the belt leg on locomotion speed. The VBASL with d = 1 mm, θ = 60°, m = 6.2 g (Dragon Skin 30) is tested on different grounds with different friction coefficients and l. Refer Figure 1 for actuation parameters. Color images are available online.
Effects of the geometric and elastic properties of the inclined legs
Geometrical and elastic properties of the inclined legs are considered as a group of parameters to affect the locomotion performance of VBASL. Actually, the geometric (l, d, θ, and b; Fig. 1D) and elastic (Young's modulus E) parameters of the inclined legs determine k. Because the soft legs are actually stubby beams with nonideal fixed constraints (as given in Fig. 1, the legs were cast with one soft plate and then bonded to the robot's main body), it is difficult to analyze the deformation field of the joint part between the legs and main body, and k is quantitatively determined by experiments. Nevertheless, simple estimation of k to the geometrical and elastic parameters can be given.
Specifically, assuming small bending deformation of legs, k can be estimated as follows:
where n is number of the legs,
Resistance of belt array to local terrain blocking
Leg structure is considered as a dominated factor for the terrain adaptability. In previous work, the bristle-like legs were widely adopted. We have conducted a comparative study on performance of bristle and belt array leg. In general, the belt array can effectively strengthen the leg–ground interaction, and avoid local blocking (stuck in gap) and interference between adjacent legs that usually occurs in bristle legs, so as to improve the terrain adaptability. Indeed, in severe environments, especially with gaps/holes, the belt-like legs are not sensitive to the uneven ground, so that they are difficult to be stuck by terrain undulation, that is, the belt array may “float” on a hilly ground as though moving on a flat ground. Figure 7 demonstrates the locomotion speeds when adopting bristle and belt legs on ground with different friction or obstacles.

Comparison of locomotion speed on different types of ground for the bristle and belt locomotion structures: locomotion speed and friction coefficient on different grounds
In general, the belt-inclined legs can steadily locomote on sponge, sandpaper, silicone pad, paper, and acrylic board, and the locomotion speed increases with the friction coefficient μ, whereas the bristle-inclined legs (made of same material) cannot move on sponge and sandpaper (Fig. 7A). Besides, the belt-inclined legs can also move on the ground with cylindrical, square, and triangular obstacles parallel (Fig. 7B) and perpendicular to the axial direction (Fig. 7C) of the barriers, whereas the bristle-inclined legs exhibit poor adaptability on all the three grounds (Fig. 7C and D). Thus, combination of the vibration actuation and resistance to local terrain blocking brings multi-leg collaboration to realize good terrain adaptability.
Optimum design of VBASL on different ground topography
Leg–ground interaction is thought as a crucial determinant to the terrain adaptability. In the theoretical model, leg–ground interaction only influences the parameters χ and k [Eq. (1)].
Specifically, when the characteristic scale of ground topography is much smaller than leg thickness d, the leg–ground interaction can be described by an effective friction coefficient μ (Fig. 7A). Thus, the ground topography affects χ, and a larger μ is preferred. According to Equation (3), such type of ground topography has a negligible effect on the optimal contact stiffness koptimal, which is verified in Figure 6 where the three curves get the peak speed at the same l.
On the contrary, for the characteristic scale of ground topography comparable with d (Fig. 8C), the leg–ground interaction becomes much more complex. In general, the “hilly” terrain is a good test of terrain adaptability. Typically, the terrain is constructed by an array of “trench” with a height h, thickness a, gap width c, and slope γ (Fig. 8C). Figure 7B and C indicates that the legs are not very sensitive to local morphology at top of the “trenches,” so we just consider a flat top.

Effects of ground topography on optimal locomotion states
As given in Figure 8C, the contact status is significantly degraded, and the local deformation of the contacted legs is also excessive. Thus, the real contact stiffness (kreal) is much smaller than the stiffness of leg k owing to the excessive deformation and small amount of contacted legs. As a result, the VBASL with optimum contact stiffness (k = koptimal) on the flat ground may be not at the optimum state on the “hilly” ground because kreal < koptimal. Thus, on “hilly” ground, stiffer legs should be adopted to maintain the optimum state, which is demonstrated in Figure 8A, and means the optimum contact stiffness may be a universal criterion to optimize the locomotion performance of VBASL on different terrains.
Besides, the myriopod structure makes the robot have enough working legs to locomotion in practical unstructured environments. Even if the working legs are too few to maintain the hopping mode, the VBASL also can automatically adjust the locomotion mode to the sliding mode to maintain the basic locomotion ability.
Furthermore, a series of experiments were conducted to investigate effect of the geometry of trench ground on locomotion. Figure 8B demonstrates the effect of terrain slope. Namely, the locomotion speed approximately lineally decrease with γ because of the increase of resistance from gravity, until it reaches a critical value γc. As given in Figure 8D, v x decreases rapidly to zero with the increase of c partly owing to the decrease of kreal and deterioration of local contact. In Figure 8E, an increase in h results in a slight decrease of vx, and the speed finally approaches to a constant when h exceeds a critical value hc.
Actually, if the height of trench is small, the legs can occasionally touch the bottom of gaps, which is beneficial to increase kreal, so as to enable better locomotion performance. The increase of a results in a rapid increase in vx at first (Fig. 8F), which reflects an edge effect of the legs–trench interaction partly hindering the locomotion. Of interest, locomotion speed approaches a constant when a exceeds a critical value ac. Indeed, even on flat ground, not all legs are in the same working state because of the heterogeneity of the contact status. Thus, above the critical trench width ac, the number of working legs is saturated. Overall, the terrain adaptability is most sensitive to the gap width c. Thus, for the practical terrain with small gap width, the VBASL always can adapt it well by utilizing the vibration actuation and multi-leg collaboration.
Extended functionalities of VBASL with variant configurations and adhesion
Variant configurations of VBASL can be introduced to bring new functionalities. For example, the steering function can be realized by a dual-channel VBASL (Supplementary Fig. S2), that is, by parallel arrangement two basic VBASL together and independently controlling the on/off of the two VBASL. As given in Figure 9A (or Supplementary Movie S8), the dual-channel VBASL can be remote controlled to move along any given path. Another example is a VBASL with cylindrical configuration (Supplementary Fig. S3). In addition to the locomotion on flat ground (Fig. 9B and Supplementary Movie S9), the cylindrical VBASL can locomote fast in narrow space such as thin pipes (Fig. 9C–E and Supplementary Movie S10).

Variant configurations of VBASL: dual-channel VBASL (battery: 150 mAh, 302323; Bangkai New Energy Co. Ltd; wireless controller: JN1Q-2A; Chuangliwei Wireless Tech Co. Ltd.) moves along a given path “XJTU” by manual controlling
Furthermore, because of the soft enveloping, the cylindrical VBASL shows excellent survival ability in severe environment, such as anti-compression/-impacting (Supplementary Movie S11). Meanwhile, as all the outer surface can generate driving force, the cylindrical VBASL is flipping/toppling insensitive. Thus, it is promising for applications of search-and-rescue and transportation in complex environments. Besides, by introducing magnetic adhesion, VBASL can climb the wall rapidly (Supplementary Movie S12).
Conclusions
In this work, we comprehensively explored the terrain adaptability and locomotion speed of the VBASL. The resistance to local terrain blocking and optimum contact stiffness are two general strategies to improve locomotion performance of VBASL. Specifically, by using the arrayed belt legs instead of bristle legs, the locomotion structure is endowed with resistance to local terrain blocking and harmonious multi-leg collaboration, which is the foundation of good terrain adaptability. The VBASL were found to adapt to any ground with a reasonable slope and roughness (or gap/obstacle size) that is comparable or smaller than the size of the belt leg.
Furthermore, the similar optimum contact stiffness was observed to achieve peak locomotion speed on different terrain. Then, a theoretical locomotion model was developed which gives the optimum contact stiffness as
Footnotes
Authors' Contributions
L.S. and Y.L. conceived the idea, designed the experiments and supervised the project. Y.Y. carried out the experiments. L.S. developed the theoretical model. Y.Y., S.L. and Z.L. carried out the FEM simulations. Y.Y., L.S., and Y.L. analyzed the data and wrote the article.
Data and Materials Availability
Data and materials supporting the findings of this manuscript are available from the corresponding authors upon reasonable request.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
The study was supported by the National Natural Science Foundation of China (Nos. 11890674 and 11902226), and Key Science and Technology Innovation Engineering Project of Shandong Province of China (2019JZZY010301).
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.