
Abstract
Flexible robotics are capable of achieving various functionalities by shape morphing, benefiting from their compliant bodies and reconfigurable structures. In this study, we construct and study a class of origami springs generalized from the known interleaved origami spring, as promising candidates for shape morphing in flexible robotics. These springs are found to exhibit nonlinear stretch-twist coupling and linear/nonlinear mechanical response in the compression/tension region, analyzed by the demonstrated continuum mechanics models, experiments, and finite element simulations. To improve the mechanical performance such as the damage resistance, we establish an origami rigidization method by adding additional creases to the spring system. Guided by the theoretical framework, we experimentally realize three types of flexible robotics—origami spring ejectors, crawlers, and transformers. These robots show the desired functionality and outstanding mechanical performance. The proposed concept of origami-aided design is expected to pave the way to facilitate the diverse shape morphing of flexible robotics.
Introduction
Flexible robotics possess compliant bodies and reconfigurable structures to achieve multiple functionalities, such as delivering different objects1,2 and going through diverse environments.3,4 The essential performance for functionality is the controllable shape morphing, based on materials or structural design or both. The material-based shape morphing can be classified into passive shape morphing with soft materials and active shape morphing with active materials. The emphasis of the former is to seek efficient actuation strategies like pneumatic, hydraulic, or chemical energy to drive the shape changing of robots,1,4,5 while the latter is to explore advanced active materials to realize specific deformations in response to the external stimuli.6–13
Shape-morphing strategies of flexible robotics based on structural design are focused on exploiting special structures with specific mechanical properties, such as negative Poisson's ratio,14,15 multistability,16–18 and buckling. 19 These structures can provide various and programmable deformation modes and, thus, have many advantages and great potential prospects. 20 Among various structural design strategies, origami made of thin paper is a promising candidate.2,21–27 First, origami is constructed by folding the paper along the prescribed creases on an easy-to-manufacture two-dimensional sheet. The distribution of creases can be designed to provide desired geometrical constraints, leading to different degrees of freedom of motion and potentially simple control systems.23,28–30 Second, the bending effect usually dominates in the origami system, introducing generically nonlinear effective mechanical response, which can be utilized to design origami springs,24,28,31 origami cantilevers,32,33 etc. Despite having various designs of origami actuators/robotics in the literature, these applications usually suffer from difficulties: (1) The models to capture the shape morphing rules and the mechanical response are usually sophisticated (e.g., computationally expensive truss model34,35), which enhance the difficulties of the rational design; (2) There usually exists inevitable stress concentration at the corner of the crease (e.g., Kresling pattern 22 ), which results in undesired damage to the structure. Therefore, it is necessary to develop new theoretical methods to overcome these difficulties and guide the further use of origami in flexible robotics.
In this work, we consider the generalized origami springs as a template for the application of flexible robotics, which also overcomes the abovementioned difficulties to some extent. To this end, we first introduce a series of origami springs by alternately folding multiple regular-polygon-array paper ribbons, known as the interleaved origami spring (IOS). IOSs exhibit stretch-twist-coupling shape morphing when stretching. We demonstrate a continuum model to simplify the analysis of the shape morphing and the mechanical response of IOSs. The theoretical model is validated by experiments and finite element simulations. Moreover, to optimize the mechanical response and improve the damage resistance, we propose an origami rigidization method by predesigning additional creases on the facets to transform the buckled facets into rigidly foldable facets. The simulation shows that the origami rigidization significantly lowers the stress concentration and enhances the damage resistance of the structure. Then, the shape-morphing performances and mechanical responses of IOSs are further applied to construct flexible robotics, including origami spring ejectors, crawlers, and transformers, which demonstrate the feasibility of the origami-aided-design concept. Finally, we anticipate that the design framework can be generalized and applied to other systems such as stimuli-sensitive and nonperiodic origami.
Construction of the Origami Spring
The zigzag origami (ZO) is the simplest origami structure to provide elasticity of a rectangular paper ribbon through the alternate mountain-valley folding. Applying the uniaxial force F, the ZO behaves as a nonlinear spring with no twist involved (Fig. 1a). Inspired by the ZO, we construct an IOS by alternately folding two perpendicularly arranged rectangular paper ribbons of the same size (Fig. 1b). In addition to elasticity, the IOS also exhibits a coupled twist along the central axis (Fig. 1c) when stretching, due to the interactions between these two paper ribbons. To enrich the class of IOS, we systematically fold ribbons consisting of chains of different polygons. These IOSs are named as IOS-6 and IOS-8, respectively, depending on the shapes of the facets (Fig. 2; Supplementary Note S1 and Figs. S1 and S2). They are expected to have distinct stretch-twist couplings and mechanical responses due to the different interactions of facets, which will be analyzed later.

Geometry of the ZO and IOS.
Schematics of the stretch-twist-coupling performance of IOSs and continuum analysis diagrams.
Shape Morphing Modeling
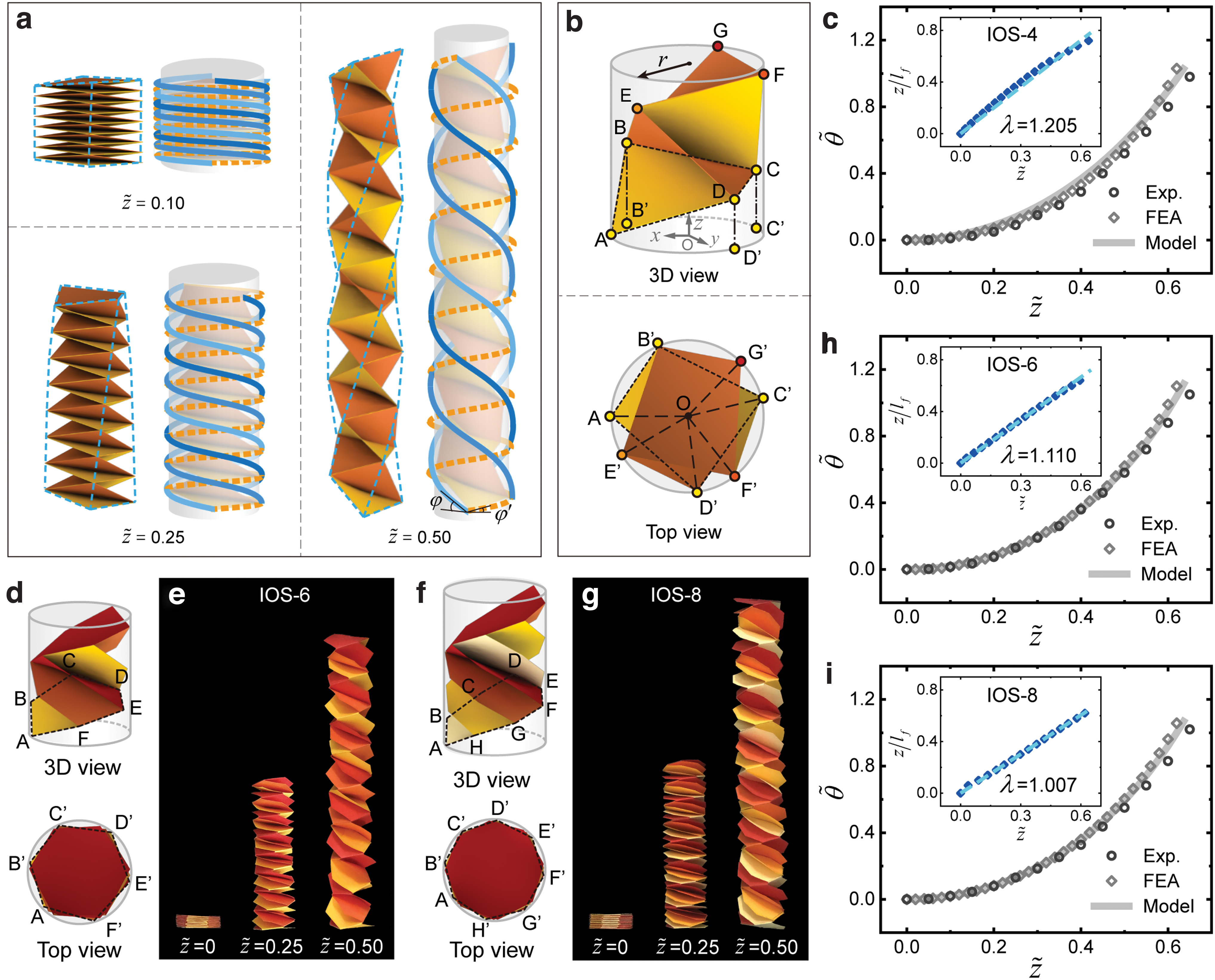
In this section, we aim to analyze the stretch-twist coupling of IOSs, by replacing the origami structure with an analogous continuum having the same effective response. This method makes the shape-morphing analysis easier and more intuitive and also can be used for other kinds of origami structures. Figure 2a shows the IOS-4 configurations and the corresponding analogous continuum diagrams in different extension ratios with eight unit cells. The continuum consists of a cylinder with four helices winded on the surface. Three assumptions are satisfied in the simplified model. First, all the sides keep straight with a constant side length a; second, the process is quasi-static, while all the unit cells keep the same configuration; and third, all the origami vertices land on the corresponding helices. The stretch-twist performance is characterized by two dimensionless parameters, that is, the twisting angle of each cell
where
We intercept four adjacent facets of an IOS-4 as the unit cell, which contains two square facets in each paper ribbon (Fig. 2b). Projecting the vertices of the unit cell onto the plane perpendicular to the cylindrical axis and passing through A, one can obtain the projected vertices B′, …, G′ and the sum of the projected arcs
by calculating the projected arcs, where
where
where
Similar analyses are also performed for IOS-6 and IOS-8. The geometric parameters of IOSs with differently shaped facets but the same circumradius r0 are listed in Supplementary Table S1 (derivation process see Note S2 in Supplementary Data). The theoretical, FEA, and experimental results in Figure 2h and i reveal that similar stretch-twist couplings also exist in IOS-6 and IOS-8, with slight discrepancies. It is noted that
Structural Optimization
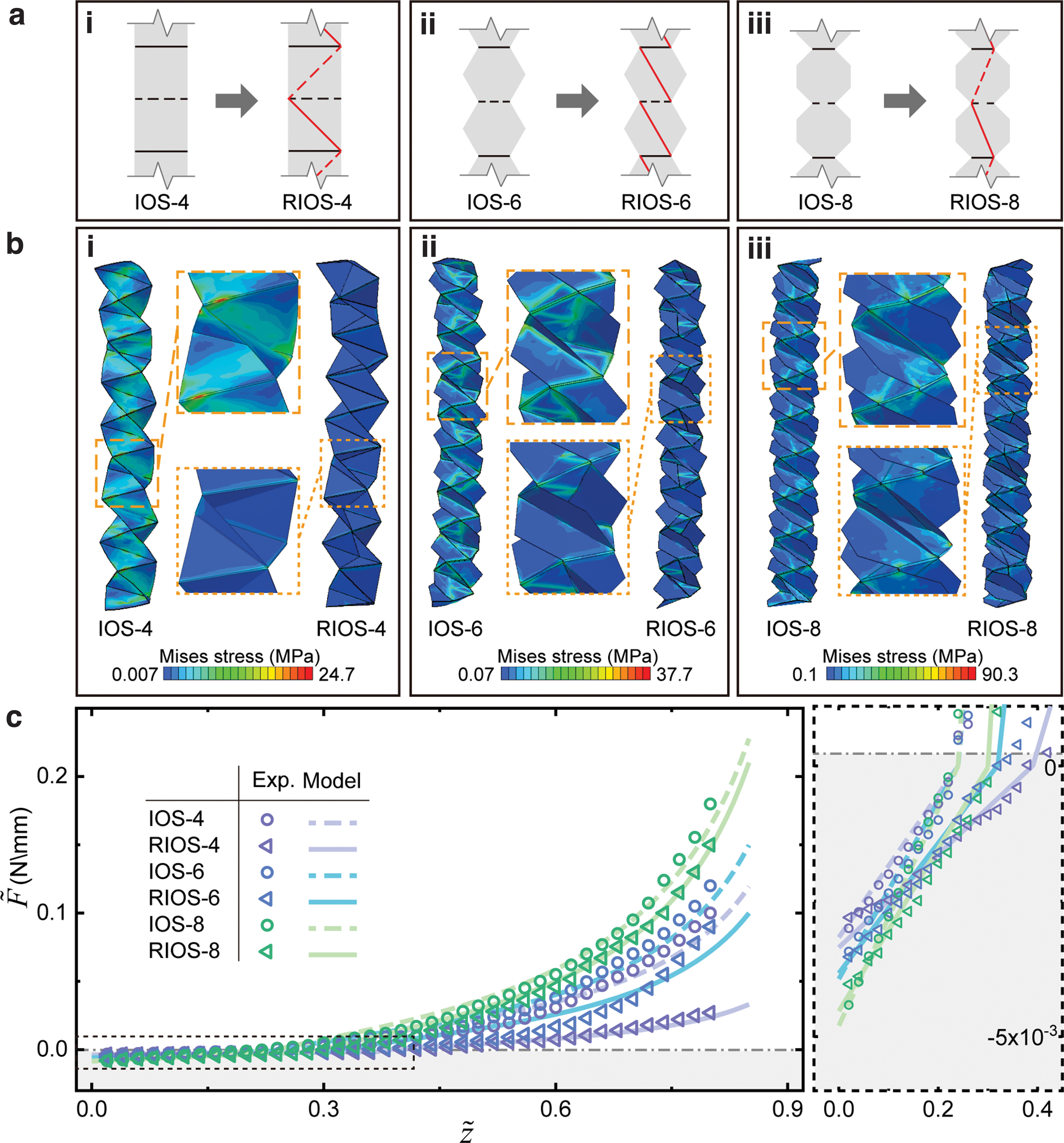
We observe that the IOSs undergo more and more significant buckling with the progress of stretching in both experiments and simulations. The buckling results in the increase of elastic energy and, hence, the increase of tensile force. Moreover, stress concentrations mostly appear near the corners of creases (Fig. 3b) and cause undesired damages. To resolve these, we propose a predesign-crease strategy, that is, setting additional creases (namely secondary creases, red lines in Fig. 3a) along the diagonals of facets in addition to the primary creases (black lines in Fig. 3a) along the sides to guide the predictable folding rather than buckling. Similar buckling-control strategies were reported but with different purposes and effects.29,36–38 By setting these secondary creases, the overwhelmed buckling is released and the buckling conflicts between adjacent facets are relieved, resulting in great improvements of mechanical performances. This strategy essentially transforms the buckled facets into rigidly foldable facets and, therefore, is named origami rigidization method. Accordingly, the name of the IOS optimized by this method is thus updated as rigidized interleaved origami spring (RIOS).
Demonstration of the origami rigidization method.
Figure 3b shows the FEA results of the shape-morphing configurations of IOSs and RIOSs (
Next, we analyze the mechanical response of IOSs and RIOSs. Figure 3c illustrates the force-extension curves of IOSs and RIOSs.
Observed from the compression region,
where
In the tension region, the force-extension relationship is no longer linear (Fig. 3c, left), which could be attributed to the stronger and stronger interactions between the adjacent facets as the extension progresses. The total shape-morphing energy E is given by the sum of the folding energy of the primary creases
where
where A1, A2, B1, B2, C1, and C2 are the geometric correlation parameters related to  . Then the stiffness constants
. Then the stiffness constants
Performance in Flexible Robotics
Origami spring ejector
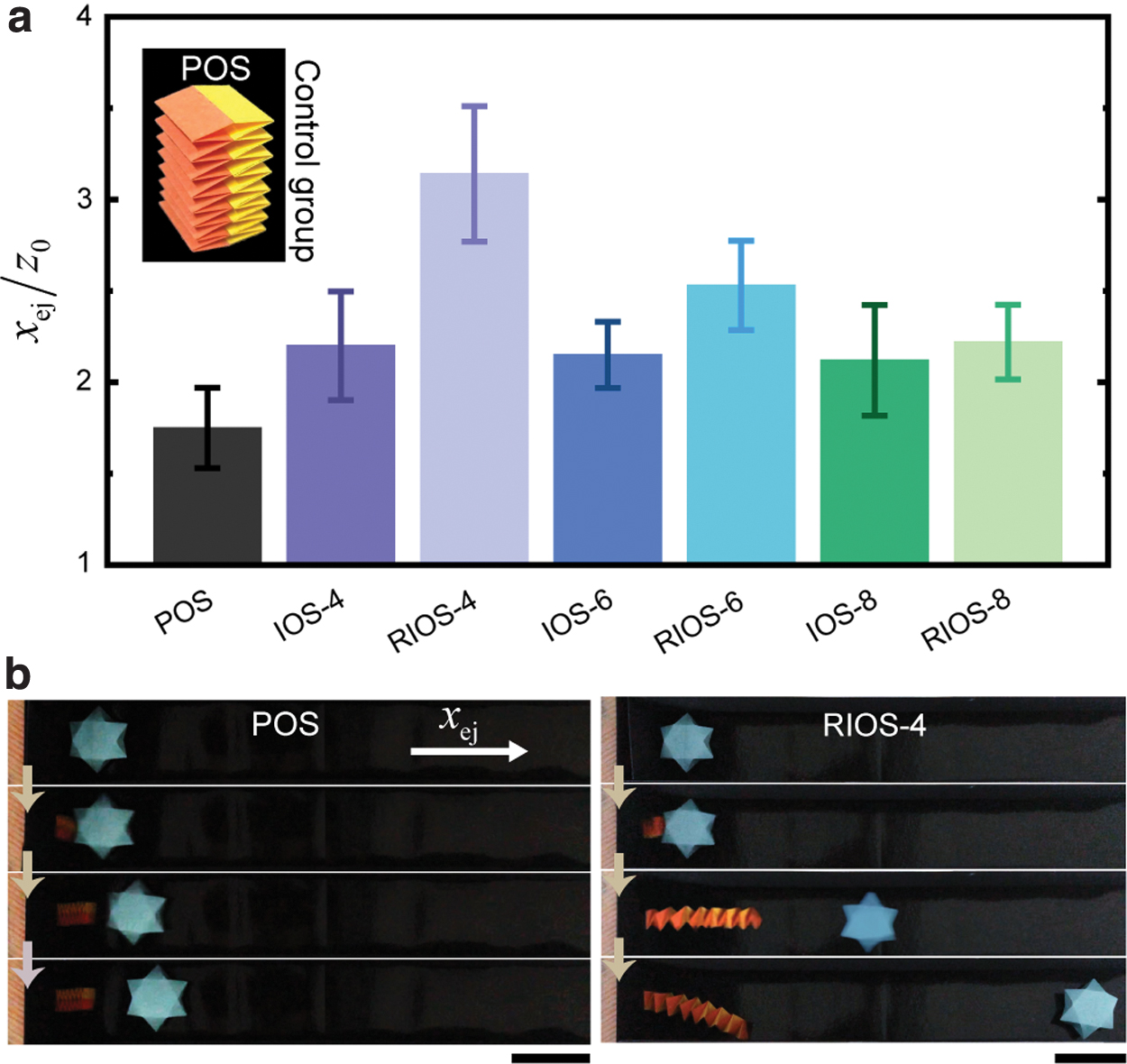
Since the origami springs have excellent compressing elasticity, they can be used as ejectors. We arrange two ZOs in parallel with the same size and number of creases as IOS-4, named parallel origami spring (POS), to be the control group. All origami springs were first compressed to the minimal length and rapidly released to push the origami hexagram for a distance ejecting. Several factors determine the ejecting performance, including z0 and
where g is the gravitational acceleration constant. In this study, we ignore the small reciprocating motion of the origami spring for simplification. As seen from Eq. (9), it requires to increase the complete compression force of origami springs, that is,
Performance of origami spring ejectors.
Origami spring crawler
The origami spring crawler uses the outstanding recovery ability of the spring from its extended state to the free state. The elastic recovery performance was tested by repeatedly stretching the origami springs from their free extension states to

Performance of origami spring crawlers.
Moreover, the origami spring crawlers have the ability to cross cliffs. Also using IOS-8 as the demonstration, the crawler climbed over a cliff step by step through properly stretching and contracting the body (Fig. 5c; Supplementary Video S3). When the width of the cliff increased to a considerable value, the crawler stored elastic potential energy by stretching the body and released it instantaneously to obtain enough initial velocity to leap over the cliff like an arrow (Fig. 5d; Supplementary Video S3).
Origami spring transformer
We demonstrate an origami spring transformer utilizing the deployability and the stretch-twist coupling. The fabrication process is exhibited in Figure 6a, which follows three steps sequentially: connecting two IOS-4s (

Design, fabrication, and resulting of an origami spring transformer.
Conclusion
In this work, we demonstrate that the structural design of generalized origami spring with good shape-morphing performance is of benefit to the applications of flexible robotics. We first present a design strategy of generalized IOS, which exhibit stretch-twist coupling under uniaxial tension. We establish a continuum model and an origami rigidization method based on the experiments and finite element simulations to capture, analyze, and improve the shape-morphing performance of the IOSs. Guided by the theoretical framework, we propose ejectors and crawlers using the good elasticity of origami springs and devise an origami spring transformer that is capable of multiple transformations and a rolling motion. Besides the IOS, the stretch-twist coupling has also been observed in some deployable cylindrical origami systems and found in wide applications.22,39,40,41,42 However, comparing with them, IOS exhibits significant advantages in the simple and fast folding process, controllable buckling-folding transformation on facets, excellent stretch-twist-coupling characteristic, smooth and continuous folding/unfolding motions, and good maintaining of the central axis during shape morphing. These abovementioned advantages indicate that IOSs are good candidates for structural designs of robotics.
The framework can be potentially and naturally generalized using paper ribbons with different polygons or combining IOSs and RIOSs, so as to break the axially symmetric stretch-twist-coupling and achieve various shape-morphing performance. Alternatively, active materials can be used to design stimuli-sensitive origami springs. Taken together, we expect that our framework of origami-aided design will pave the way to facilitate the diverse shape morphing of flexible robotics.
Footnotes
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work was supported by the National Natural Science Foundation of China (NSFC) under grant nos. 91848201, 11988102, 11521202, 11872004, and 11802004 and Beijing Natural Science Foundation under grant no. L172002.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.