
Abstract
Research on soft artificial muscles (SAMs) is rapidly growing, both in developing new actuation ideas and improving existing structures with multifunctionality. The human body has more than 600 muscles that drive organs and joints to achieve desired functions. Inspired by the human muscles, this article presents a new type of SAM fiber formed from twisting and braiding soft hydraulic filament artificial muscles with high aspect ratio, high strain, and high energy efficiency. We systematically investigated the relationship between input pressure and output elongation as well as contraction force of the new muscles using different configurations in terms of an array of single and multiple muscles arranged in nontwisting (or straight), twisting, and braiding variants. Experimental results revealed that the twisting and braiding configurations greatly enhanced the muscle elongation and generated force compared with their nontwisting/braiding counterparts. To demonstrate the new muscles' usability, we implemented several muscle variants to bidirectionally manipulate 3D-printed human fingers and elbow, mimicking the human upper limb with a full range of motion. We also created a bioinspired growing soft tubular muscle that could simultaneously exert longitudinal and radial expansion upon pressurization, similar to that of auxetic metamaterial structures. The new growing soft tubular muscles were experimentally validated and the results showed that they could be potentially implemented in several emerging applications, including smart compression garments, stent-like supporting devices, and tubular grippers for medical use.
Introduction
The human body contains more than 600 muscles, which are used to actuate organs, joints, and tissues, to facilitate movement, move food through the digestive tract, or allow the heart to pump blood to the lung and body. 1 Many studies have long been carried on to expand the use of artificial actuators that mimic biological muscles by directly using power (pressure, electrical, chemical, or thermal sources) to generate motion and force.
Soft artificial muscles (SAMs) have become an emerging research field in recent years thanks to their promising potential to revolutionize the traditional rigid robotic counterparts.2,3 With high versatility, flexibility, compliance, and resilience to disturbances,4,5 the SAMs are ideal substitutes for conventional rigid actuators to develop human-friendly and safe robots, 6 haptic devices, 7 wearable exoskeletons,8,9 and conformable robotic structures. 10 Abundant ideas in terms of actuation methods and conceptual designs of the SAMs have been proposed, including (i) electrically driven muscles such as dielectric elastomer actuators,11,12 electroactive polymers, 13 and phase-change materials 14 ; (ii) thermally driven muscles such as shape memory polymers, 15 shape memory alloys, 16 and polymer fibers17,18; and (iii) magnetically driven muscles19–21 and (iv) pressure-driven muscles.22–24
Pressure-driven actuators offer great simplicity and performance in terms of high force and ease of implementation compared with others, making them the most popularly used SAMs. Among them, pneumatic artificial muscles (PAMs) can be either operated in contractible or extensional mode, which is controlled by applying air pressure to a pneumatic bladder. The PAMs are lightweight because their main element is a thin membrane that allows them to be directly connected to the structure they power, an advantage to replace a defective muscle if they work in a group.2,3,22 In an approximation of the human muscles, the PAMs are usually grouped in pairs, including one agonist and one antagonist.
The McKibben muscle, a type of PAM, was first developed in the 1950s for artificial limbs.8,25 Although this muscle offers many advantages such as high contraction force and low cost, the retraction strength of the McKibben is limited by the total strength of individual fibers in the woven shell, while the tightness of the weave limits the exertion distance. In an attempt to re-engineer the PAMs, other studies, which are not limited to the use of air pressure, have been introduced to optimize the performance of the PAMs. They include fluid-driven origami-inspired artificial muscles (FOAMs), 26 split tube pneumatic actuators, 27 hydraulically fluidic fabric muscle sheets, 28 vacuum-actuated muscle-inspired pneumatic structures, 29 and inverse PAMs. 30
Although significant progress has been achieved, the insufficient contraction ratio poses a challenge for many fluid-driven muscles, including the PAMs and our recent new muscle, making them a disadvantage compared with the human muscles.25,27 To further minimize the McKibben muscles' size, Koichi's group developed miniature McKibben muscles where they inserted a miniature elastic bladder inside an outer braided sleeve. The new muscles could produce a high contraction elongation or force when receiving positive pneumatic pressure.25,31,32 To increase the muscle elongation limit, they grouped multiple single muscles in a braiding configuration, which subsequently resulted in an increase of the muscle contraction limit (28–41%). 33 In another approach, Kurumaya et al. developed a three-strand braided active textile muscle that could increase the muscle elongation up to 26.8%, compared with those of multiple single McKibben muscles arranged in a straight configuration. 32 These results reveal that the McKibben muscles, once braided, could enhance their elongation limits and therefore their generated force.
The idea of twisting artificial muscles to increase their strength also attracted considerable attention recently.34,35 Using thermal heating as driving source, Kharal et al. created composite bijels (bicontinuous interfacially jammed emulsion gels) by hydrodynamic twisting multiple bijel fibers around a core polymeric support fiber. 35 The composite bijels could increase the tensile strength up to 20 MPa, roughly 4000 times higher than that of the liquid bijel fibers. Many researchers have also investigated hybrid yarn artificial muscles (HYAMs), in which they tailored the multiple fibers to increase the muscle energy densities. Lima et al. introduced carbon nanotube (CNT) HYAMs consisting of stimuli-responsive, guest-filled paraffin waxes into twist-spun CNT yarns. 36 This combination enables customization of muscle stimulants with high contraction stress (up to 84 MPa). In a similar approach, Mu et al. used the stimuli-responsive material where the guest-filled CNT yarns were replaced by a sheath on a twisted or coiled core using inexpensive yarns. 37 The sheath-run muscles could generate a dense contractile power of 1.98 W/g, 40 times larger than those of the human muscle.
Yuan et al. created high-energy microengines from twisted shape-memory nanocomposite fibers. 38 The fiber is a synthesis of polyvinyl alcohol and graphene oxide nanoparticles. This HYAM could produce a work capacity of around 2.8 kJ/kg upon thermal exposure. Kanik et al. fabricated bimorph fibers from high-density polyethylene and cyclic olefin copolymer elastomer by the fiber-drawing technique. 39 The twisted bimorph fibers could achieve a work capacity of 7.42 kJ/kg when thermally stimulated. These results demonstrate that the artificial muscles, once twisted or braided, could enhance their elongation and strength, which can be implemented in several robotic applications.
We recently introduced soft microtubule artificial muscles (SMAMs) formed from inserting a soft microtubule into a hollow microcoil as constraint layer. 40 The insertion method avoids manual wrapping of inextensible fibers along the microtube and hence allows a uniform distribution of the constrained outer coil to prevent unexpected failure when operating against high hydraulic pressure. Using this fabrication method, the soft muscle size could be scaled down to 0.8 mm in the outer diameter and could reach a high aspect ratio (∼5000 of length:diameter). In addition, it also offers a high strain (at least 250%) and tuneable generated force using a prestretch ratio for the inner silicone tube while maintaining high energy efficiency and wide bandwidth (at least 20 Hz).7,40
In this article, we introduce a new method of twisting and braiding multiple SMAMs, which can contribute to enhance the muscle elongation and hence contraction force. To demonstrate the effectiveness of the new approach, we constructed different prototypes for new SMAM-based soft muscles using different configurations, including multiple single muscles arranged in nontwisting (or straight), twisting, and braiding variants. We experimentally characterized and compared the new muscle-generated strain and force corresponding to the input pressure for each configuration. To better describe their elongation/force relationship, we also developed analytical models for the twisting and braiding configurations. We also showed that by braiding multifilaments with different turns and structures, we could form a new type of SAM that has enhanced capabilities to perform the desired actuation.
To validate our new concepts, we fabricated different prototypes and deploy them to manipulate knuckle joints of an index finger model and control an elbow joint of an arm model, mimicking the function of human muscles. We also created a newly bioinspired soft tubular muscle and demonstrate its multifunctions as a compression sleeve for massage therapy, which can be used to improve blood circulation or a stent-like hollow muscle that can be utilized to support the arteries or gastrointestinal (GI) tract while performing endoscopic surgeries. Finally, we braided multiple SMAMs to form a soft tubular gripper that could perform grasping tasks or retrieve objects in a confined space such as the human GI tracts or hollow tubes where conventional grippers find difficult to perform.
Soft Microtubule Artificial Muscles
As shown in Figure 1, we use SMAMs, which have an inner silicone microtube or microtubule and an outer constrained microcoil, for our proposed approach. Briefly, the SMAM is created by inserting this microtubule into the microcoil (or extension microspring). The distal end of the microtubule is tied in a knot before sealing to the microcoil by an adhesive silicone, while the proximal end is connected to a fluid source via a fluid transmission tube.7,40 The microtubule is a soft and high strain hollow tube made from silicone elastomer or silicone rubber. The spring coil comes from various materials such as stainless steel, brass, or polymer wires. The microcoil at the outer layer constrains the radial expansion of the microtubule under fluid pressure, resulting in a longitudinal lengthening of the SMAM. The SMAM in a form of filament can be made excessively long, which can be wrapped around a spool pin and will be cut to the desired length afterward (Fig. 1). Multiple muscle filaments can be twisted and braided to form an integrated muscle for further application or customization. Detailed material selections, frequency response, and muscle size can be found in Phan et al. 40

A new class of SMAMs inspired by the human skeletal muscles consisting of multiple muscle fibers. The SMAM fabrication steps include the insertion of a soft microtubule into a spring coil to create a long premuscle filament that can be cut to the desired length afterward. Multiple SMAMs can be twisted or braided to form a new class of artificial muscles with the desired structure such as tubular shape. SMAMs, soft microtubule artificial muscles. Color images are available online.
The SMAM working principle is mainly based on the fluid dynamics of force transmission and the energy conversion from fluid pressure to mechanical work. Both the microtubule and the microcoil are elastic elements that can be deformed to generate mechanical strain and then store elastic energy in the form of an elastic force, which is lately discharged to reform their initial structure (Fig. 2A). A typical working cycle of the SMAM consists of three distinct phases: (i) initial phase where the muscle is in its relaxed position with no input pressure and no stored elastic energy; (ii) pressurizing phase where the muscle receives fluid pressure to induce the muscle elongation and thus store the elastic energy. The more pressure the muscle receives, the more elongation it exhibits, resulting in the more elastic energy it accumulates; and (iii) releasing phase where the fluid pressure is withdrawn. The SMAM always tends to discharge the stored elastic energy to restore its initial length. Once the fluid pressure is reduced, the SMAM will release its stored elastic energy and then convert it into mechanical work if the SMAM is working against an external load. A higher stiffness of the outer helical coil and higher Young's modulus of the inner elastic materials together with a smaller stretch ratio of the inner microtubule will result in a stronger contraction force of the SMAM.

Working principle and analytical model illustration.
The relationship between the displacement x and contraction force Fout = FSMAM of a single SMAM has been given in Phan et al.,
40
which is now reintroduced here:
where α, E, A0 represent the stretch ratio, Young's modulus, and cross-sectional area of the microtubule, respectively; kc is the stiffness coefficient of the microcoil and li is the initial length of the SMAM.
When combining n SMAMs (n > 1) in a straight configuration (or S-SMAM), the S-SMAM elongation is equal to that of a single SMAM under an assumption that each individual SMAM has a similar physical structure. The S-SMAM will then exert a contraction force of nFSMAM where FSMAM is the contraction force of an individual SMAM in the S-SMAM. This new generated force can be expressed by the following:
Enhanced Performance of the SMAMs with Twisting and Braiding Configurations
To enhance the SMAM elongation while retaining its flexibility, we introduce here twisting and braiding configuration methods to form a new class of SAMs. Although prior studies showed that the strain limit of the SAM could be increased by braiding, 33 however, twisting multiple fluid-driven artificial muscles to enhance its elongation limits is not widely implemented as we propose here. We demonstrate that the change of twisting or braiding angle or the number of twisting or braiding turns will affect the muscle elongation and thus its contraction force. We also further demonstrate that the new configurations of the SMAMs will enable tremendous possibilities to customize the muscle structure based on the required strain, stress, compactness, and flexibilities, to meet specific circumstances, which can be found in the next sections.
Twisting soft microtubule artificial muscle
The twisting soft microtubule artificial muscle (T-SMAM) can be achieved by twisting multiple SMAMs or folding a single SMAM to form multifolded segments and then twisted them together. In particular, the T-SMAM can be created by a combination of the two methods. There are different types of T-SMAM configurations, depending on the number of segments after folding, the number of twisting turns, and the number of participated SMAMs. Although the working principle of the T-SMAM is similar to that of a single SMAM, the muscle elongation can be tuned by varying the number of twisting turns, which subsequently increases its contraction force. It means that the T-SMAM with a higher extension ratio will produce a higher contraction force for the same initial configuration and nominal length compared with those smaller ones. For the T-SMAM, when pressurizing, besides the intrinsic longitudinal elongation of each individual SMAM segment, there will be a reduction in twisting angle, leading to an additional prolongation of the muscle length.
The change in the output elongation under the applied fluid pressure of the T-SMAM is given in Figure 2B. Assume that the new muscle (T-SMAM) consists of nt similar SMAMs and each individual SMAM has the same initial length lit, outer diameter dt, and twists mt turns in the same direction. The T-SMAM will then have an outer diameter Dit and an initial length hit. Each SMAM will have the same pitch pit (pit = hit/mt) and twisting angle φit that can be obtained from a one-revolution decomposition in Fig. 2B and expressed by the following:
Under a fluid pressure P, each individual SMAM will elongate with an amount of xt to reach a new length lpt. This will lengthen the T-SMAM to a value of hpt. In practical applications, both ends of the T-SMAM should be maintained in their original configuration, meaning that they do not have any relative rotary motions. This condition contributes to maintaining a constant number of twisted turns mt while the T-SMAM is in operation. However, the twisting angle decreases if the muscle elongates, inducing a closer contact between individual muscles and thus reducing the T-SMAM diameter from Dit to Dpt. This radial shrinkage is defined by ɛrt = 1 − Dpt/Dit and can be obtained by experiments. The parameter ɛrt mainly depends on the number of participated muscles nt, the muscle length lit, and the number of revolutions mt. In the pressurizing phase where the T-SMAM is under fluid pressure, it has a new twisting angle φpt, length hpt, and pitch ppt (ppt = hpt/mt), which can be described by the following:
From these equations, one can obtain the longitudinal elongation or ɛlt = hpt/hit − 1 of the T-SMAM. The accumulated displacement xt of each muscle can be expressed as follows:
While the exerted force of each individual SMAM can be expressed by Equation (1), the contraction force Fout,t of the T-SMAM is a summation of the total exerted forces of all participating SMAMs, which is given by the following:
Braiding soft microtubule artificial muscle
Several segments of a single SMAM or multiple SMAMs or multiple T-SMAMs can be braided to create a braiding soft microtubule artificial muscle (B-SMAM). The B-SMAM structure can readily vary from traditional constructs that include the classic three-strand braid, multiple-strand flat, and round braid. 41 The working principle of the B-SMAM is similar to that of a single SMAM or the T-SMAM. However, the elongation of the B-SMAM can be tuned by varying the number of braiding turns. The B-SMAM will have a higher extension ratio or higher contraction force for the same initial configuration and nominal length if a higher number of braiding turns are used during the fabrication. Similar to the T-SMAM, the B-SMAM always has a reduction in the twisting angle, resulting in a higher elongation of the muscle compared with that of an individual SMAM.
Round braid is a basic braiding technique that incorporates both twisting and weaving of associated filaments to form a rod-like product.
41
This technique typically requires an even number of participating filaments, in which they are divided into two groups. The filaments of the two groups will then twist in opposite directions and interlace wherever a cross occurs. Here, we introduce an analytical model for the B-SMAM using the same technique as that of the T-SMAM. Figure 2C illustrates the working principle of a B-SMAM made from nb single SMAMs where each has an initial length lib, an outer diameter db, and mb twisting turns while weaving with its peers. The B-SMAM at the initial phase has a length hib and an outer diameter Dib. By decomposing one turn of a single B-SMAM, we can reveal two distinct features of twisting and weaving configurations: (i) twisting properties are depicted by pitch pib (pib = hib/mb) and twisting angle φib; and (ii) weaving effect is represented by the interlacing angle θib. These initial parameters can be obtained from a one-revolution decomposition in Figure 2C:
In the round braid technique with nb muscles, each muscle will interlace two times with nb/2 muscles of another group in every revolution. Therefore, each individual muscle will have nb interlacing points at each turn. The interlacing angle can be calculated by the following:
where
Under a fluid pressure P, each muscle will elongate an amount of xb to reach a new length lpb or the B-SMAM will lengthen to hpb. Similar to the T-SMAM, we assume that there is no relative rotation between two ends of the B-SMAM or the twisting turns mb are constant during the B-SMAM operation. At the pressurizing phase with the pressure P, the B-SMAM has a new set of parameters, including interlacing angle θpb, twisting angle φpb, length hpb, and pitch ppb = hpb/mb, which can be expressed by the following:
where ɛrb = 1 − Dpb/Dib denotes the radial shrinkage of the B-SMAM (from Dib to Dpb).
The longitudinal elongation of the B-SMAM will be ɛlb = hpb/hib − 1 while the accumulated displacement xb of each individual SMAM can be expressed by the following:
It is noted that the exerted force of each individual SMAM is described by Equation (1). The contraction force Fout,b of the B-SMAM is a summation of the exerted forces of all participating SMAMs, which can be detailed as follows:
Experimental Characterization
In this section, we introduce the detailed experimental setup, fabrication of different muscle prototypes, and characterization of the new muscles together with model validations.
Experimental setup and prototypes
We built an experimental platform (Fig. 3) to characterize the muscle performance, in which we aim to establish the relationship between input (volume and pressure) and output (elongation and contraction force). We then validated our developed analytical models given by Equations (1) to (14). We also compared the performance of different muscle prototypes to provide a better understanding of how the muscle parameters affect their elongation and their generated force.

Experimental setup to characterize muscle performance.
The experimental platform consists of a motorized linear slider (Zaber, Canada), which can provide input volume (pressure) to the muscle via a miniature syringe (BD Biosciences, Canada) and fluid transmission microtubes. A pressure sensor (Honeywell) is located right after the syringe to monitor the fluid pressure. While the muscle's proximal end was fixed, its distal end was connected to an encoder (U.S. Digital) to monitor the muscle elongation (Fig. 3A) or to a load cell (Futek) to collect force data (Fig. 3B). We used a linear slider (Misumi) as a guide to preventing the relative rotary motion of the two muscle ends. An elastic string maintained tension between the muscle's distal end and the encoder, preventing slack when acquiring the displacement signal. Distilled water was used in this instance, although it should be noted that our SMAMs were developed to work with any liquid such as hydraulic oils. The use of these oils or higher boiling point fluids such as cooking oil or hydraulic oil avoids the boiling problem due to cavitation or when the SMAMs are used in high-temperature environments.
We produced seven specimens, including the ones with straight, twisting, and braiding configurations (SM1 to SM7, Fig. 4), for experimental characterization. All specimens were constructed from the same fundamental SMAMs made from silicone rubber microtubules (Saint-Gobain, France) and stainless steel spring coils (Asahi Intecc, Japan). Detailed specifications of specimens can be found in Table 1. Each end of the specimen was attached to its 3D-printed blocks, forming a modular sample for easy installation and disassembling on the testing platform. We also used similar one-to-multi fluid distributors (made by 3D printer: Ultimaker, Netherlands; material: polylactic acid, Cubic Technology, Australia) to dispense fluid from a single syringe outlet to multiple muscles simultaneously. This ensured a similar energy loss among the specimens.

Specimens involved in the experiments (details shown in Table 1). The orange circles in each subfigure represent the arrangement of SMAMs at the proximal end and the distal end to form desired muscle configurations. Color images are available online.
Specifications of Specimens
Elongation characterization
To analyze the muscle specimens' performance, we applied 0.2 Hz sinusoidal signals to the syringe plunger in the elongation tests, providing input volume and pressure to the specimens. Amplitudes of these input signals varied for each specimen so that they could reach maximum pressure at the vicinity of 1 MPa. Experimental results (Fig. 5A, B) show that a single 75-mm-long muscle (SM1) required around 0.06 mL fluid volume to reach 1.05 MPa and achieve 48% elongation. Proportionally, to achieve the same pressure, four-strand specimens (SM2, SM3, SM4) and seven-strand specimens (SM5, SM6, SM7) needed ∼0.23 and 0.4 mL of the fluid, respectively. However, while the two straight configurations (four-strand straight and seven-strand straight) achieved the same elongation as those of the single specimen, their twisting and braiding configurations produced slightly higher elongations of 53% for twisting (10.4% enhancement) and 55% for braiding (14.6% enhancement).
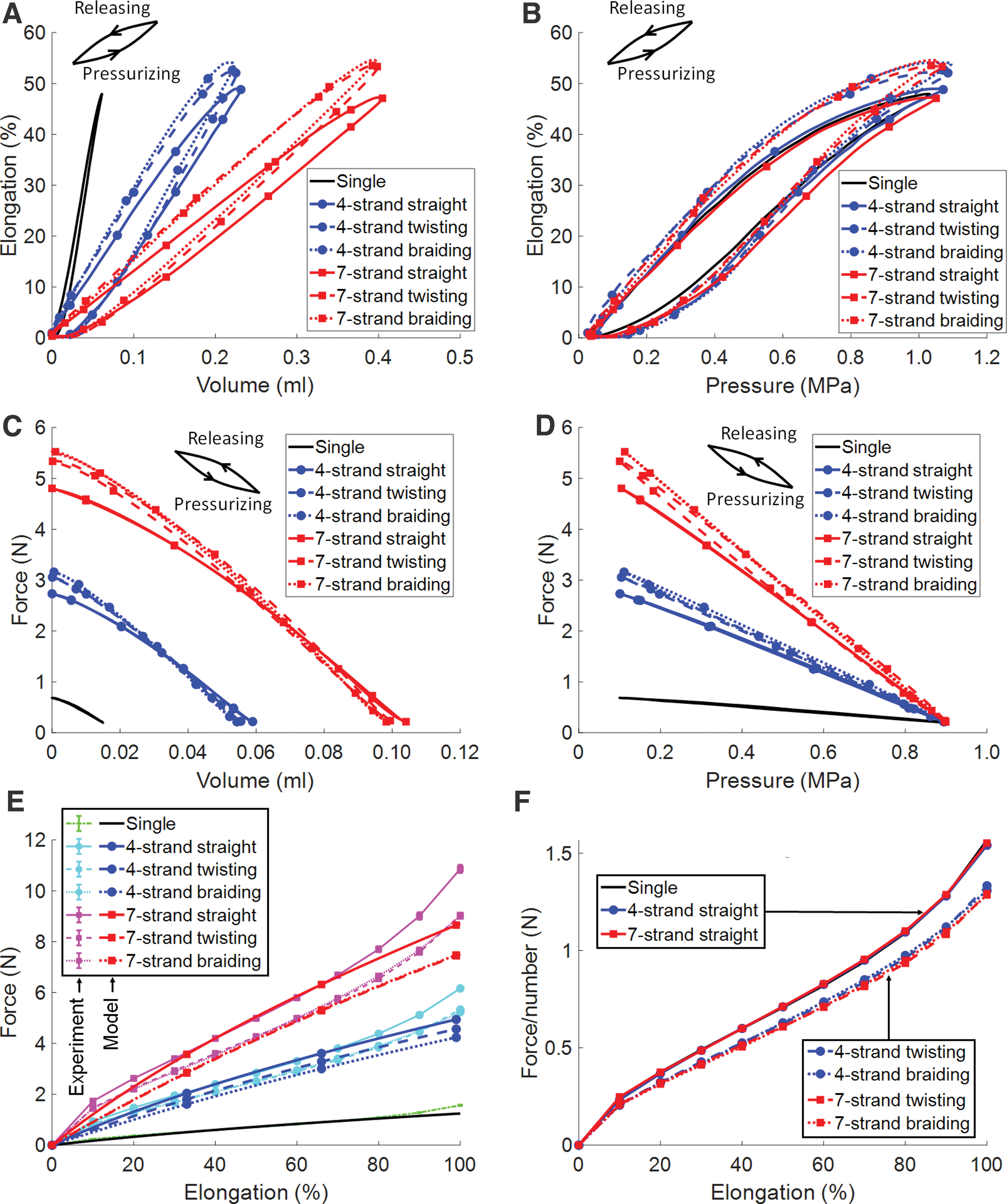
Experimental results of seven specimens.
These elongation enhancements agree with our hypothesis in the previous section that the twisting and braiding configurations provide additional displacement by reducing the twisting angle in the pressurizing phase. Hysteresis relationships between input (volume and pressure) and output elongations can be identified in the corresponding graphs (Fig. 5A, B), where a gap existed between the pressurizing and releasing phase of each specimen. The underlying mechanism of this phenomenon is energy loss. The muscle discharges a smaller amount of energy in the depressurizing phase than it receives in the pressurizing phase. Furthermore, the incomplete removal of air bubbles inside the transmission fluid tubes and the muscles at the fabrication stage also widened the hysteresis gap. As such, the higher the volume the specimen requires, the larger the gap that occurs (Fig. 5A).
Force characterization
We also carried out experiments to evaluate the generated force of the specimens. We first supplied fluid volume to the specimens until they reached 0.9 MPa and then connected their distal ends to a load cell for the force measurement. Subsequently, we withdrew the fluid volume using 0.2 Hz sinusoidal signals from the linear actuator to induce specimen-dependent amplitudes where the pressure was reduced to 0.1 MPa. Results (Fig. 5C, D) reveal that after receiving 0.9 MPa in the pressurizing phase, a single 75-mm-long muscle (SM1) could exert ∼0.69 N contraction force when releasing the pressure. In similar conditions, the four-strand straight and seven-strand straight specimens achieved forces of 2.73 and 4.81 N, respectively. The twisting and braiding configurations of both four-strand and seven-strand specimens, as expected, reached a higher contraction force of 3.06 N (12.1% enhancement) for four-strand twisting, 3.17 N (16.1% enhancement) for four-strand braiding, 5.35 N (11.2% enhancement) for seven-strand twisting, and 5.53 N (15% enhancement) for seven-strand braiding.
Force enhancement is an inevitable consequence of elongation enhancement. As a result, the twisting and braiding configurations will achieve higher elongation than straight configurations at the same input pressure. In other words, they accumulate more elastic energy, resulting in the exertion of a stronger contraction force.
Hysteresis profiles of the input volume and pressure versus output contraction force (Fig. 5C, D) show the inverse relationship between the SMAM contraction force and the input volume and pressure. The hysteresis profiles of the pressurizing and releasing phases of each specimen are almost overlapping, which means that these specimens have consistent durability. This behavior reflects the immediate response with minor energy loss of the SMAM when it receives prestored elastic energy at the initial condition. Specimens in force characterization were continuously stretching. In contrast, specimens interchanged states (from relaxing to stretching and vice versa) in the case of elongation tests. Another interesting feature of the SMAMs is the linear relationship between the input pressure and output force (shown in Fig. 5D). This feature will allow us to achieve the desired generated forces on the proviso that the pressure is precisely controlled.
Elongation: force relationship
Experimental results in the previous parts enable us to interpret the proportional relationship between elongation and contraction force of the SMAM via input pressure. We conducted experiments to establish a direct relationship between elongation and force and validate our developed analytical models given by Equations (1) to (14). Using the previous specimens and testing platform, we gradually increased input volume and pressure so that we could collect contraction force at each blocked elongation ranging from 0% to 100% with a 10% increment. The average force and standard deviation of five testing cycles are presented in Figure 5E. The chart reinforces the previous interpretation regarding the proportional relationship between contraction force and elongation and provides insight—similar curved patterns for all seven specimens.
The more elongation the muscle accumulates in the pressurizing phase, the more contraction force it exerts in the releasing phase. The spline curves are combinations of the spring coil's linear characteristic and the microtubule's nonlinear attribute. The curves are slightly convex until the inflection point (about 70% elongation), followed by a rapid increase due to the augmentation of the microtubule Young's modulus. Figure 5E also illustrates analytical models of single SMAM [Eq. (1)], S-SMAM [Eq. (2)], T-SMAM [Eq. (7)], and B-SMAM [Eq. (14)], where parameters are given in Table 1. Our proposed models closely captured experimental data for all specimens until the inflection point (root mean square error ranging from 0.032 for SM1 to 0.3048 for SM6).
We divided each specimen's experimental force data (Fig. 5E) by its corresponding number of individual muscles to obtain the unit force presented in Figure 5F. There are two distinguishable groups, where the group with single and straight configurations has a larger unit force than those with twisting and braiding variants. The smaller contraction force of twisting and braiding configurations in this observation does not conflict with force enhancement in the previous experiments because of different baseline comparisons. The twisting and braiding specimens have shorter initial lengths than their single or straight peers so that they required lower pressure to reach the same elongation (elongation denotes the ratio between accumulative displacement and initial length), resulting in a weaker contraction force. In contrast, if pressure is used as a comparison baseline or input, the twisting and braiding variants will benefit from the twisting angle reduction, enhancing elongation and therefore achieving a higher contraction force (Fig. 5D).
Multifolded twisting and braiding configurations with a single SMAM
We investigated the performance enhancement of twisting and braiding configurations from another perspective. We utilized only a single SMAM to construct each twisting and braiding specimen instead of using multiple SMAMs as in the previous comparison. Four specimens were fabricated from the same muscle type (OD 1.49 mm) with different lengths and configurations: single-, double-, quadruple- and octuple-twisting so that they have a similar initial length of 35 mm (Fig. 6). We then supplied the identical input pressure (equivalent to an input force of 20 N to the syringe plunger) to these specimens and recorded their elongations. Results revealed that the single SMAM could reach 85.7% elongation. This value increased to 91.4% (6.7% enhancement), 100% (16.7% enhancement), and 115.7% (35% enhancement) for the double, quadruple, and octuple variants, respectively. The results are mean values of 10 trials for each configuration.

Elongation enhancement by multiple twisting of a single muscle. All four specimens have the initial lengths of 35 mm, and were configured from the same fundamental muscles (Table 1) with different lengths. Blue arrows: pressurization. Color images are available online.
These results confirmed that the muscle elongation proportionally increases with the number of participating segments or higher twisting turns of the T-SMAM. Similarly, this augmentation mechanism also happens to the B-SMAM. The increment ratio is affected by an increase in both the number of segments and the twisting angle. The specimens with more twisting segments undergo a larger reduction of twisting angles than that of lesser segments, resulting in a larger elongation with the same input pressure. It is also noted that the twisting and braiding configurations of the SMAM share the same applications with the single SMAM but at a higher elongation threshold. As a result, these variants enhance the exertion force with a compact and integrated design, promoting the development of heavy-duty wearable suits or facilitating the miniaturization of medical devices to operate in confined spaces.
Applications of the SMAM, T-SMAM, and B-SMAM
SMAMs and their associated structures for exoskeleton and wearable assistive devices
Although the proposed SMAM can exert extension force when pressurizing, it belongs to the soft contractible artificial muscle category. The SMAM elongates to store elastic potential energy and subsequently discharges this energy to induce contraction force when depressurizing. The similarity between the SMAM working principle and mechanisms of human biological muscles enables various biomimicking possibilities, where a pair of SMAMs can be used to manipulate an articulated joint of the human limbs (e.g., knee, ankle, elbow, wrist, or knuckle).
To demonstrate the usefulness of our developed muscles, we fabricated two simple human bone models by the 3D printing technique and then we used our muscles to control the joint movement to demonstrate the above concept. The first one was a hand model with an active index finger that has three controlled links and three rotational joints connected via stainless steel pins. We produced a pair of SMAMs (OD 3.18 × L100 mm, coated with a layer of Ecoflex-0030; Smooth-On, Inc.) to mimic the flexor digitorum profundus muscle of the hand. Like the human hand, the integrated SMAMs were not connected directly to the links but via two tendons that run alongside these links and joints (Fig. 7A). Despite underactuation, the two SMAMs could complete the full range of flexion and extension of the index finger (accumulative angle >270°).

Bioinspired soft artificial muscles.
The second model was an arm-forearm with a rotational elbow manipulated by a pair of quadruple-T-SMAMs (each has a length of L150 mm, made from a single muscle OD 1.49 × L600 mm). The two muscles alternate between pressurization and depressurization to mimic the human bicep and tricep, inducing bidirectional rotation of the elbow within a 120° range (Fig. 7B). Since the SMAMs exert contraction force, the controlled link will be pulled toward the depressurized muscle. To demonstrate our muscle capability, we replaced the quadruple-twisting muscles with a pair of double-T-SMAMs (each muscle has a length of L130 mm, made from a single muscle OD 3.18 × L260 mm) to control the elbow while lifting a weight of 200 g at the hand-end of the forearm (Fig. 7C). The double-twisting muscle could generate a torque of 0.353 Nm (weight of 200 g, arm length of 180 mm) or an equivalent force of 10.1 N (moment arm 35 mm).
It is necessary to mention that we simplified the actual human anatomy by replacing the complex elbow and knuckle joints with the articulated substitutes. These results show that our developed muscles for both SMAMs, T-SMAMs and B-SMAMs, can be implemented in soft robotic structures and wearable assistive devices for haptic feedback, human augmentation, and rehabilitation.
Growing soft tubular artificial muscles for robotic and medical applications
Growing processes are widely present and occurring every second in nature, where plants and animals evolve over their lifetime. For example, the human esophagus, bones, trachea, and artery can increase their size when the body grows. Likewise, plants also demonstrate an increase in size.42,43 There are also many species with tubular organisms that can alternate their body measurements (length and diameter) for either locomotion or prey catching such as bobbit worms (Eunice aphroditois), earthworms, and leeches. 44 Other animals such as snakes or lizards can expand their bodies after swallowing a large-size prey.45,46 Inspired by such biological growth, we created new SMAM-based soft tubular muscles that could simultaneously induce longitudinal and radial expansion upon pressurization (Fig. 8). The new muscle exhibits the special characteristics of auxetic metamaterial structures, where they have a negative Poisson's ratio, meaning that they become thicker perpendicular to the axial elongation under applied fluid pressure.47,48

Bioinspired soft tubular muscle.
To fabricate a soft tubular muscle, we braided eight single SMAMs (OD 1.49 × L80 mm) using the hollow round braid technique. The new muscle has an outer diameter of 20 mm, a length of 58 mm, and a twisting angle of 40° (Fig. 8). At the interlacing points where any two muscles meet, we used elastic strings to secure these points. It is noted that we used only one hydraulic syringe to supply fluid (distilled water) to all eight SMAMs via a one-to-eight fluid distributor, enabling a miniature size for the transmission tube from the syringe. We supplied input pressure to the soft tubular muscle and this results in simultaneous growth in both axial and radial directions, up to 52% longitudinal elongation (ɛl) and 45% radial expansion (ɛr) (Fig. 8B). The underlying mechanism of this growing phenomenon is due to the helical arrangement of each SMAM where the elongation of each individual is divided into longitudinal and radial constituents. The ratio between these two constituents relies on the twisting angle φ. For example, the tubular muscle with twisting angle of φ < 45° will have a longitudinal elongation, which is larger than radial expansion and vice versa.
As a proof-of-concept, we then implemented the soft tubular muscle in several applications. First, the tubular muscle's radial motion enables its utilization as a compression garment (sleeve), which is one of the most commonly applied methods to treat and prevent a wide variety of musculoskeletal injuries and circulatory conditions.49,50 Our tubular muscle at the initial stage could embrace firmly to the human index finger and subsequently release the compression force when receiving input pressure (Fig. 8C). Because of its mesh-like structure with high flexibility, the smart compression garment also works well with a bending finger. It means that its mesh eyes can self-adjust their shape to conform to various curved surfaces. This feature allows the use of one long device for multiple links across joints, including arm-elbow-forearm and thigh-knee-lower leg, enabling a smart compression garment for the upper limbs and lower limbs. In addition, the soft tubular muscle is scalable due to the scalability of the SMAM size and the hollow braid parameters. Therefore, it also permits dimensional customization for specific targeted areas of the human body. The new tubular muscle for compression therapy is expected to potentially provide the normal force to the contact surfaces such as other compression garments and a tangential force to the skin while maintaining consistent pressure to reduce pain and inflammation and promote healthy fluid circulation.
Second, we utilize the soft tubular muscle as a support device for medical applications such as medical stents, which can be inserted into the lumen of an anatomic vessel or duct to keep the passageway open or other different purposes ranging from expandable coronary, vascular, and biliary stents, to simple plastic stents used to allow the flow of urine between the kidney and bladder.51,52 In this article, our stent-like soft tubular muscles are expected to be used as a new class of soft artificial stents, which can hold arteries open to improve the blood flow or serve as a colon/intestine support device that can prevent collapse while performing endoscopic full-thickness dissection surgeries (Fig. 9).

Soft tubular muscles as hollow support devices. (Upper panel) Soft tubular muscle grows inside a silicone sleeve and layflat tubing. (Lower panel) Potential application of soft tubular muscle as a medical stent for cardiovascular disease treatment or as a support structure to prevent the collapse of the human colon in endoscopic surgeries. Color images are available online.
To demonstrate the capability of our soft tubular muscles, we deployed the muscle into a layflat tubing (low-density polyethylene, width 50 mm, thickness 50 μm) and a silicone sleeve (OD 19 mm, thickness 0.5 mm, Ecoflex 00-30; Smooth-On, Inc.) simulated as a human colon or blood vessel. The tubular muscle plays the role of an expandable soft skeleton providing structural support for a thin and soft outer layer. It could inflate up to 50% ɛl and 45% ɛr inside the layflat tubing and drops to 29% ɛl and 20% ɛr in the case of the silicone sleeve. These results reveal that the outer layer material properties and thickness greatly affect the tubular muscle growing ratio. Furthermore, the slippery surface of the layflat tubing allows the tubular muscle to glide inside while growing. This is in contrast with the sticky silicone sleeve where the tubular muscle has to bear the silicone stretching force.
Finally, we also demonstrated the use of our growing tubular muscle as a soft tubular gripper. Figure 10A shows that a tubular muscle (weight of 6 g) could lift a weight of 500 g, which is 83 times heavier than the gripper mass (this already excluded the mass of the miniature syringe). When approaching the object, we supplied the fluid pressure to expand the muscle diameter to embrace the object. While maintaining the input pressure, we lowered the tubular gripper to further increase the contact friction between the gripper and the target object. Once the gripper conformed to the object, we then released the pressure and moved up the gripper together with the accompanied object (see Supplementary Video S1 for the entire process).

Tubular muscle as a tubular gripper.
Experimental results revealed that the soft tubular gripper is a promising candidate for object retrieval in confined spaces such as objects lying in a small and long cylindrical tube or foreign objects swallowed inside the human GI tract. Figure 10B and C presents examples of using the tubular gripper (OD 20 × L58 mm) to retrieve a painting knife and an “AA” battery, respectively, from a cylindrical tube (ID28 × L240 mm). The gripping procedure was similar to the previous lifting demonstration. First, we inserted the tubular gripper (initial phase) into the cylindrical tube and approached the object. Second, we supplied pressure to inflate the gripper until it touches the tube's inner surface. Third, we performed the swallowing technique by continuously switching between pumping and releasing input pressure while lowering the gripper. These combined maneuvers resulted in the gradual invasion of the gripper to the free space between the tube and the object. Fourth, after embracing/swallowing the object, we released the pressure and lifted the object out of the tube (see Supplementary Video S1 for the swallowing technique).
These results demonstrated that our tubular gripper is also a potential retrieval tool to deal with foreign objects swallowed inside the human GI tract while maintaining sufficient flexibility inside the complex esophagus (Fig. 10D). In a retrieval task (e.g., a battery inside the stomach), the gripper with the help of a conventional endoscope will be delivered onsite (stomach) through the upper GI tract. The endoscopist or surgeon will then perform the grasping technique described above to embrace and retrieve the object under endoscopic visualization. The tubular gripper is well suited for retrieving objects comprising many different shapes, especially thin and slender shapes such as bars, beams, and rods. These shapes normally cause difficulty for the current, conventional endoscopic retrieval devices such as retrieval forceps and retrieval nets.
Discussion
We have introduced scalable and flexible SMAMs, created by inserting a soft silicone microtubule into an extension microcoil. This simple fabrication method allows mass production with high repeatability on quality and functionality. Manufacturers can commence large-scale production to suit customers' muscle specifications or supply spools of long muscles as off-the-shelf products. The SMAM receives fluid pressure to induce longitudinal elongation and store elastic energy simultaneously. Subsequently, it discharges this energy to exert contraction force and return to its initial stage when releasing the pressure. Our SMAM embodiment OD 1.49 mm (L75 mm) could achieve 48% elongation when receiving a pressure of 1.05 MPa. It also generated around 0.69 N contraction force when being pressurized to 0.9 MPa. Detailed characterization and performance of our single SMAM such as maximum strain, energy efficiency, durability, and frequency response can be found in our previous work. 40
We exploited the SMAM potential as filaments to configure the more complex and desired structures by the twisting and braiding techniques. When supplying the same input pressure (1.05 MPa), compared with multiple single SMAMs in a straight arrangement, their twisting and braiding configurations possess higher elongation, at 10.4% and 14.6% enhancement, respectively. In addition to conventional longitudinal elongation upon pressurization, the twisting and braiding variants receive supplemental displacement caused by the decrease of the twisting angle. Consequently, the contraction force of the twisting and braiding variants increased by 11.2–16.1%. Alongside using multiple single SMAMs, we could establish twisting configurations by multifolded twisting a single SMAM. Experimental demonstrations showed that an octuple-T-SMAM provided 35% more enhancement than a single SMAM with similar initial lengths. The twisting and braiding abilities of the SMAM enable elongation and force enhancement without increasing the number of participating muscles, making it suitable for applications with limited spaces or situations requiring compact devices such as endoscopic instruments, soft exoskeleton gloves, or suits.
We have demonstrated the use of our developed SMAM as artificial muscles to mimic the flexor digitorum profundus muscle of the hand to manipulate the entire range of motion of a 3D-printed index finger. We also mimicked the bicep and tricep of a hand model using another two pairs of twisting variants. They could control a 120° motion range of the elbow joint with and without an attached load. This concept of using a pair of SMAMs to actuate an articulated joint will be useful in many robotic applications, including surgical robots and exoskeleton devices.
Using the hollow round braid technique, we produced a tubular muscle that could simultaneously grow in the longitudinal and radial directions. Subsequently, we deployed the tubular muscle as a compression sleeve embracing the human index finger to provide massage therapy. Furthermore, it could support hollow cylindrical structures, potentially being used as stents or GI tract support devices. We also implemented the tubular muscle as a tubular gripper that could embrace and lift an object in free space or retrieve objects in a confined space. The gripper also has the potential for foreign object retrieval in the human GI tract.
It is noted that the working principle of our muscle is different from the conventional McKibben muscle. In fact, our muscle extends when receiving input pressure and contracts when reducing the pressure. It means our muscle is not used as a pushing actuator, but we utilize its contraction force to pull against a load when releasing the pressure. Despite advances, our SMAMs and their associated structures, including T-SMAM, B-SMAM, and SMAM-based tubular muscle, have several limitations. They require relatively high pressure to function (48% strain at 1.05 MPa) because of the outer spring coil. Since the SMAM is a contractible artificial muscle, the tubular muscle showed good grasping and holding ability but limited expansion force. Therefore, future work should focus on exploring new material combinations to reduce the spring effect, and investigating various braiding techniques or other filament arrangements to further exploit its potential as an artificial muscle.
We believe that a muscle with more strands will produce more elongation enhancement and therefore exert a stronger contraction force. It is definitely possible to increase the number of strands in these configurations to achieve higher force in a trade-off with structural complexity and fabrication difficulty. Theoretically, more strands in a twisting or braiding muscle will increase the twisting angle, translating to a higher enhancement percentage of elongation and force. An optimal number of stands to produce a maximum performance for the muscle can be achieved if a simulation-based optimization technique is used (via Abaqus or COMSOL). However, it is out of the scope of this article. We also hypothesize that the number of participating muscles should stay under a certain threshold, then a higher force demand will be satisfied by increasing the muscle size, which we will carry out in future works.
In our previous work, 40 we examined the frequency response of a single muscle up to 20 Hz. Although we have not carried out experiments to examine this effect, we hypothesize that twisting and braiding configurations will slow down the muscle bandwidth. However, in many practical applications such as prosthesis artificial muscles, hollow support structures, and tubular gripper, the muscle does not require a very high-frequency response. Therefore, the twisting and braiding configurations may achieve a smaller frequency threshold than a single variant, but they probably still meet the required speed for a majority of practical applications.
We also consider adapting the developed SMAM to specific applications including soft exoskeletons, wearable robots, implantable devices, surgical tools, and haptic devices. By outsourcing microtubule and microcoil from leading manufacturers, we strive to produce muscles with 0.3–0.5 mm outer diameter, benefiting many potential medical applications such as microstent, microcatheter, and miniature flexible robotic arms for endoscopic surgery. Furthermore, the current SMAMs and their associated structures do not possess position feedback to monitor muscle elongation. Therefore, we recommend that future work should develop a new integration method of soft conductive materials such as liquid metal alloy or conductive hydrogels5,53 into the soft microtubule structure, which subsequently provides either resistive or capacitive sensing. In addition, the muscles still exhibit nonlinear hysteresis profiles, which mainly prevent their use in several applications where precision control of the motion or force is highly desired. Therefore, hysteresis model-based feedforward or nonlinear adaptive controller 54 should be applied to the muscles.
Conclusion
We developed a fluid-driven SMAM that can be used as a single muscle or twisted or braided to enhance performance. Our tubular muscle could handle multiple tasks from a compression sleeve to a hollow support structure, to a tubular gripper to retrieve objects in narrow places. We believe that our muscle construct and its potential application areas will expand knowledge and significantly benefit the robotic community.
Footnotes
Authors' Contributions
All the authors earn their authorship by contributing their work to construct the study.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
The authors acknowledge support from the UNSW Start-Up Grant (PS58173), the UNSW Scientia Fellowship Grant (PS46197), and the Vanguard Grant from the National Heart Foundation of Australia (RG204224).
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.