
Abstract
Robotic hands have long strived to reach the performance of human hands. The physical complexity and extraordinary capabilities of the human hand, in terms of sensing, actuation, and cognitive abilities, make achieving this goal challenging. At the heart of the physical structure of the hand is its’ passive behaviors. Seen most clearly in soft robotic hands, these behaviors influence and affect the mechanical, sensing, and control functionalities. With this perspective, we present a framework through which passivity in robot hands can be understood, by concretely identifying the role of passivity in the design, fabrication, and control of soft hands. In this framework we focus on the interactions between the physical hand and the: environment, internal actuation, sensor morphology, and wrist control. Taking these surrounding systems away, we are left with a passive soft hand whose behaviors emerge from external interactions. Inspired by the human hand, we define the role of these four key interacting pillars and review how state-of-the art robot hands utilize these four elements to aid functionality. We show how these pillars promote hybrid soft-rigid hands with rich behaviors, providing benefits in terms of the increased adaptability to uncertain environments, improved scalability and reduction in the cost of actuation, sensing, and control. This review provides a conceptual framework for approaching hand design and analysis through consideration of the passive behaviors. This highlights not only the advances that can be made by approaching the problem in this way but also the outstanding challenges that stem from this outlook.
Introduction
One of the fundamental challenges in robotics is achieving, or surpassing, human manipulation capabilities. The human hand exhibits a range of passive behaviors, from complex interacting soft and rigid structures, which assist in achieving their impressive diversity of hand–environment interactions. 1 As such, it has long been acknowledged that utilizing passivity in robot hands is key to improving performance and versatility, as seen in the evolution from traditional rigid hands with low passivity to soft and hybrid hands with much higher degrees of passivity.2,3 A number of key advantages have been shown through the inclusion of passive behaviors in soft robot hands, ranging from self-organizing behaviors in adaptive grasping4,5 to built-in compliance and damping for safe interactions with the environment.6,7
Exploitation of soft and passive behaviors offers methods of overcoming current technical limitations of robot hands, including to assist in achieving scalability, robustness to uncertain and challenging environments, and a reduced computational demand.8,9 To fully leverage the advantages of soft robot hands, we need to understand the complex interactions and methods for both designing and utilizing passivity.
The development of robotic hands is a significant, interdisciplinary research challenge. 2 The explicit development of passive mechanisms and control strategies that exploit this is an increasing trend; however, many robotic hands, such as soft robotic hands, utilize passivity without a specific consideration of the multifaceted effects.
Current state-of-the art research uses passivity to reduce the degrees of actuation, while not sacrificing performance in a limited range of tasks.10,11 This allows for lower cost, lighter weight, and simpler control of hands. 9 Development and diversification of the underlying passive behaviors have the potential for performance improvements beyond what actuation, sensing, and cognition can achieve alone. 12 In summary, while there is a significant body of work regarding the utilization of passivity in robotic hands, much focuses on singular aspects, for example, actuation or sensing, and there is also no formal comprehensive framework that considers the interdisciplinary. To allow this field to progress, we propose a framework for soft hands that considers the interdisciplinary and multiple roles that passivity plays.
Inspired by recent works showing impressive capabilities using soft hands with no, or little, internal actuation,7,9,10,13 we have developed a framework to capture, expand, and aggregate passive behaviors and their exploitation. Figure 1 shows the different aspects of hand passivity, from interactions with internal muscles/motors and sensing receptors in the hand and wrist, as well as external interactions with the environment, all intrinsically linked.

The framework centers on the hand design and the interactions between itself and the surrounding systems; sensing, actuation, and environment. These interactions can be exploited and improved through intelligent soft hand design.
At the heart of the framework in Figure 1 is the hand's physical design, which includes the bone geometry, ligament design, tendon routing, and skin/soft tissues, which are relatively simple individual structures, loosely coupled in parallel to form a hand with complex and diverse behaviors. These design elements influence the four interdisciplinary building blocks central to this framework. These include environmental conditioning of interactions, sensor interfaces, wrist control, and actuation and transmission. By introducing this framework, we can both demonstrate how existing research fits in, but also the future research directions required.
The remainder of this review article starts by providing background on biological hands and their use of passivity. Following this, we introduce our framework and motivate why this research, and this framework, is required. From this perspective, we then review current hands and how they exploit aspects of this framework, and also identify key remaining challenges. The goal of this review is to provide a direction and technical framework for utilization of passivity in human hands to create increasingly complex and functional robot hands. While there are a number of reviews in this field, many focus on the singular aspects, such as actuation, 14 or sensing, 15 or hands designed for prosthetics. 16 This review provides a timely means of integrating this highly fragmented and important research direction.
Framework for Passivity in Soft Hands
Soft hands are complex physical systems. Behaviors emerge from interactions with nonpassive internal elements and the environment (Fig. 1). For a successful hand, there should be diverse beneficial behaviors. Complexity and control of interactions allow creation of behavioral diversity. Beneficial behaviors emerge from optimizing design, generally for a specific task. For diverse and beneficial behaviors to emerge, we first need to understand their origin, then how to replicate. This is the aim of the framework presented.
Why research passivity in hands?
The advantages of passivity can be challenging to observe. The clearest impact is seen in hands with little, or no, internal actuation. However, a mechanically simple articulated hand, with actuation and sensing, is demonstrably more capable than a passive hand. The Shadow hand 17 is more useful than the fully passive, Wrist-driven hand. 9 However, we can extrapolate from advantages seen in structurally simple systems, which rely on passive behaviors, such as the universal gripper. 18 Researching passive soft hands has potential long- and short-term benefits; this is reflected in the increased interest in this research area with more and more compliance and adaptability built into hands, such as underactuation5,11,19 and continuous soft joints.10,20
In the short term, consideration of passive design is needed for interact-ability, including versatility to unexpected forces, shapes, and impacts, as well as the improved safety with human–robot interactions. 6 This interact-ability can lead to a reduced demand on actuators and advanced controllers through self-organization, 13 leading to more adaptable and easily controlled hands which are cheaper, safer, and lighter weight. Underactuation, postural synergies,21,22 and exploiting environmental interactions7,9 are techniques which demonstrate this.
In the long term, passivity-based hand design can lead to better general-purpose manipulation performance. Introducing passivity increases the behavioral diversity of the hand, allowing exploitation of the environment and the completion of a wider range of tasks. 9 Control of the hand-sensor interface allows us to better isolate the proprioceptive and exteroceptive data we need. 23 Research into actuators, sensors, and cognition is essential. However, intelligent passive design is critical as the bridge between these and the physical world.
Biological knowledge
Studying human anatomy and articulation allows us to more easily replicate the advantageous features of soft hands. In addition, it provides a known benchmark with which we can compare robotic hands. In this study, we highlight three areas of biological knowledge.
Anatomical structure
The human hand is structurally and behaviorally complex, which leads to diverse passive behaviors.24–26 The biomechanics of the synovial joints provides much of this complexity.25,27
Figure 2 shows the bone and joint distribution of the human hand. Excluding the wrist, there are 19 main joints: 4 per finger and 3 in the thumb. 28 The majority of these are condyloid joints, where the joint bone geometries resemble an ellipsoid and a matching recess. The thumb carpometacarpal (CMC) has a different shape, resembling two interlocking saddles. 29
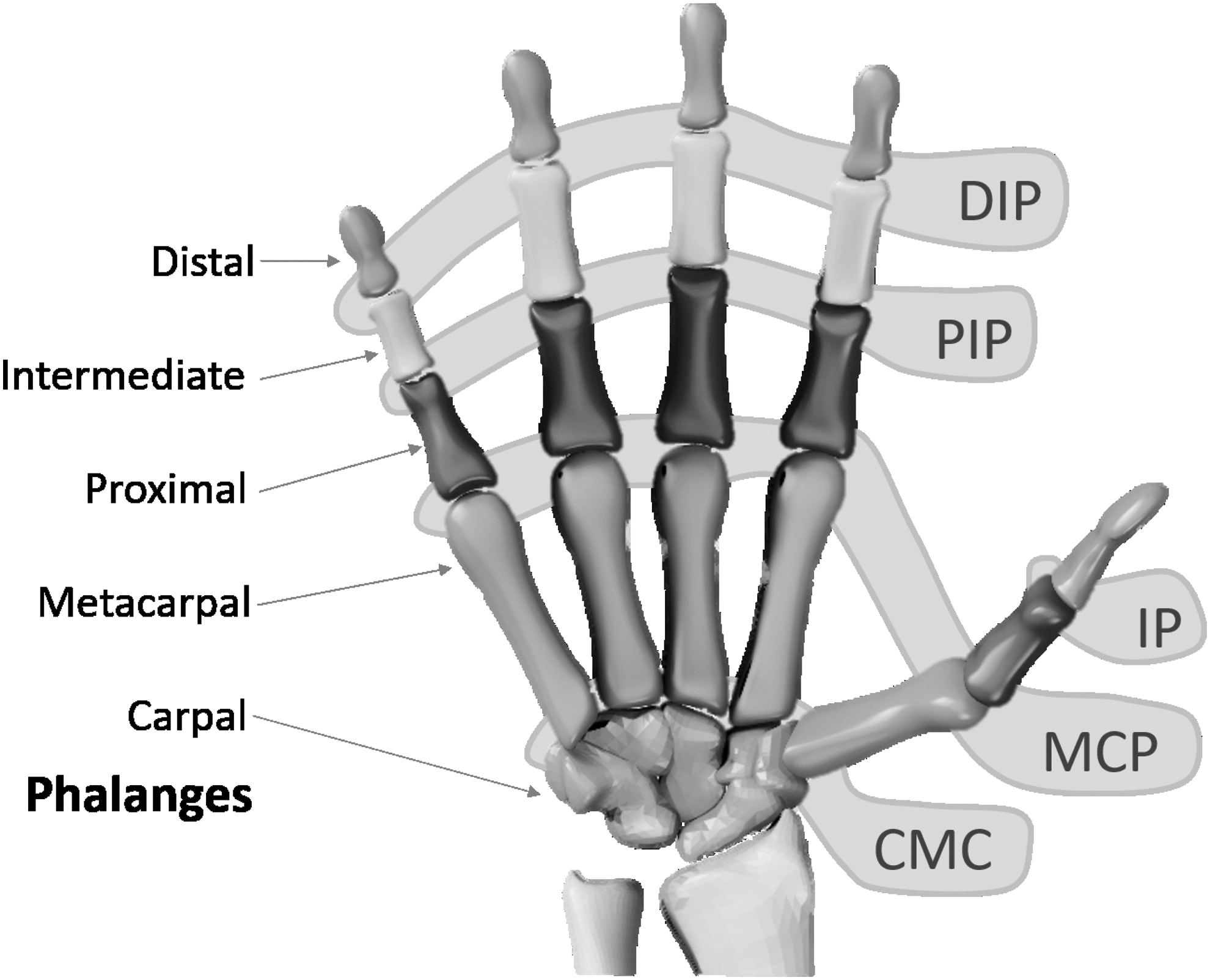
The structure of the human hand bones and joints. Highlighting the DIP, PIP, IP, and MCP are condyloid joints. Thumb CMC is of type: saddle. CMC, carpometacarpal; DIP, distal-interphalangeal; IP, interphalangeal; MCP, metacarpophalangeal; PIP, proximal-interphalangeal.
Figure 3 shows a basic synovial joint. This joint is composed of bones, tendons, ligaments, synovial fluid, and other soft tissues. Each component has a purpose: the bones provide a rigid structure for transmitting high forces 24 ; the tendons connect bones to muscles due to space limitations in the hand30,31; the ligaments stabilize the bones limiting redundant bone motions and allowing for repeatable and precise motions32,33; and the synovial fluid provides lubrication.34–36 The function and structure of each anatomical component, separately, can be understood. However, the hands’ diverse passive behaviors we observe are a result of interactions between all these components, and this interconnectivity is more challenging to understand.
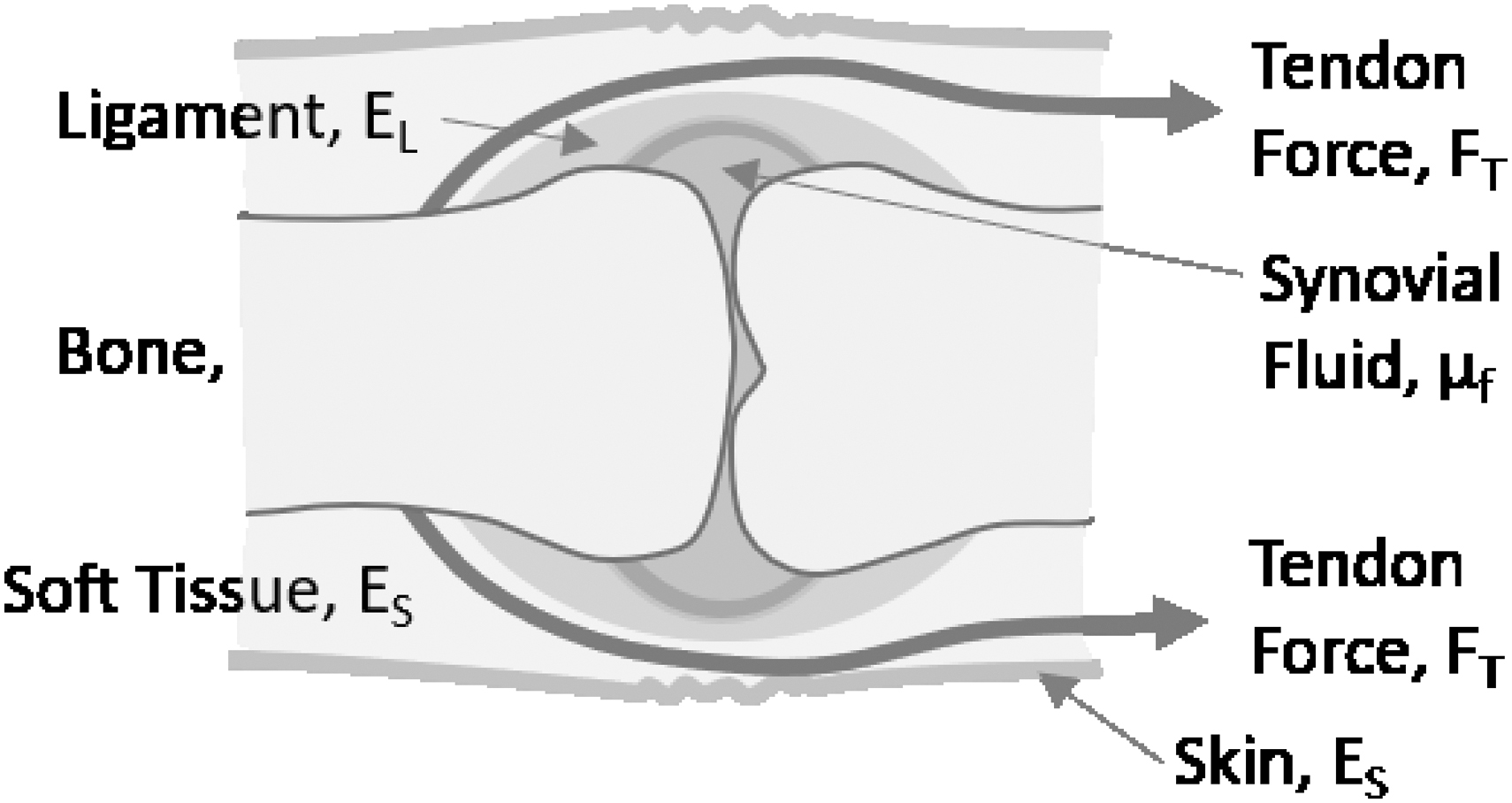
Synovial joint components and basic structure. Tendon force, FT, provides internal joint torque. Bones, ligaments, soft tissues, and skin have anisotropic elastic and damping properties, E. Synovial fluid has non-Newtonian viscosity,
Table 1 shows typical range of motion for the thumb CMC joint and the index finger joints, where minor differences in design such as bone shape of the index metacarpophalangeal and proximal-interphalangeal (PIP) give large differences in ranges of motion (Fig. 4).38,39 Bone geometry, ligament design, and tendon routing all contribute to the passive ranges of motion in each joint, highlighting the need for a more holistic approach when studying these joints.
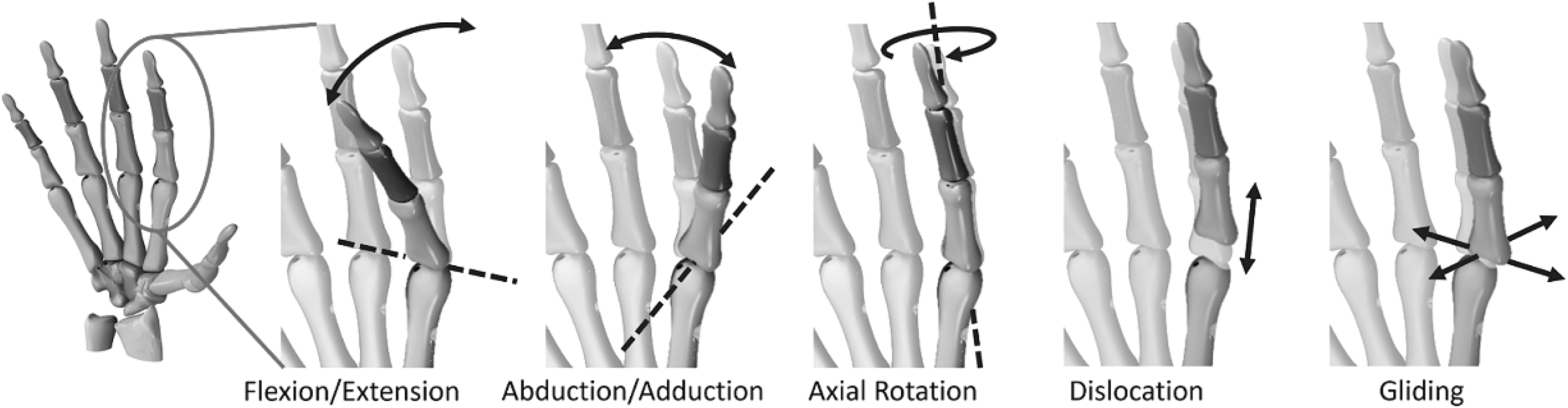
Joint motion type examples on the index MCP joint. Usual finger motion in flexion/extension and abduction/adduction axes. Some condyloid and saddle joint designs allow limited axial rotation, dislocation, and gliding.
Human Joint Range of Motion
Axes seen in Figure 4.
CMC, carpometacarpal; DIP, distal-interphalangeal;
There are additional complexities in the hybrid soft/rigid structure of the human finger that make it more challenging to define in simple terms of linear stiffness and damping from soft materials.40,41 Flexible tendon sheaths and the extensor hood contribute to dynamic, anisotropic, and nonlinear behaviors.30,31,42
The human hand exhibits a diverse range of passive behaviors, from the ranges of motion, including those allowed by hyperextension or dislocation, and the stiffness and damping which change dynamically, to the elasticity in tendon routing and shock absorbing properties of the synovial fluid.
Passive perception
The information we receive from hand sensors, particularly tactile sensors, is tightly coupled to the mechanical properties of the hand and the tissues the sensors are embedded in. A human hand skin contains 17,000 mechanoreceptors to provide detailed tactile feedback. 43 Physical interactions stimulate these receptors in different ways, generating complex signals which feed into the nervous system. The human skin exhibits complex, nonlinear viscoelastic behavior, which has significant consequences for our perception. 44
The human skin contains multiple types of receptors for sensing of stimuli, including mechanical strain and strain rate, pain, vibrations, and temperature.45,46 These data are used to infer knowledge about the environment and the current state of the hand; this is critical for many complex manipulation tasks. 45 In addition, there is some evidence to suggest that the hands biomechanics helps to process the vast amount of tactile information. Wave patterns from propagation of dynamic interactions through the skin affect the preneuronal compression of tactile information, 47 easing the computational demand in an analog to muscle synergies.
Passive dynamical transmission
Human muscles have unrivaled performance characteristics compared with current soft actuator technologies. However, the transmission and coupling of any actuator forces depend on the body. The passive structures and dynamics of the hand can have a significant effect on performance, through efficiency, force amplification, and passive viscoelasticity over the active ranges of motion. 40 For example, the elastic tendon sheaths give changing moment arms under different loading conditions, allowing both high force and high speed response.30,41 In addition, muscle synergies are a feature of the body that allows complex hand motions with relatively simple control inputs; this is especially seen in the control of individual fingers, where joints consistently move together. 48
Inspiration from biological knowledge
We have described some of the passive features of the human hand and some of its resulting behaviors. The most critical features include bone geometry, ligament design, tendon routing, and soft tissues. These are individually simple systems, connected loosely and in parallel to form a complex structure with rich and diverse behaviors. While we can intuitively see the link between some structures and the behaviors of the hand, such as modifying the bone geometry affects the passive ranges of motion, others are less intuitive or coupled with changes in other features that generate unpredictable results, such as the stabilizing behavior of the extensor hood and gliding mechanism. 30
Development of biologically-inspired soft hands provides us with a clear link between the different passive behaviors and mechanisms, allowing us to observe the trade-offs between different features and the effect of design compromises from real-world limitations. This is essential, as the hand is too complex to view in its entirety. We see much research into mimicking human hand design9,42,49; the success of these encourages us to further categorize, replicate, and preserve the diverse passive behaviors.
Framework
Figure 1 outlines the framework for development of the passivity-based hand. The design is central to the performance and the observable behaviors. This can be broken down into anatomical structures, including bone geometry, ligament design, tendon routing, lubrication, and other soft tissues. These form a complex hybrid rigid/soft structure with diverse passive behaviors.
How a soft hand interacts with the surrounding systems is critical:
Within each of these systems there is an aspect of control. Generally, soft hand design has allowed a great reduction in controller complexity, particularly in closure models for control of actuators. An extension of the framework would be to consider the effects of feedback between the systems, such as direct sensory feedback to the actuators and the corresponding implication on design. However, we currently see the above four components to be the most critical in developing soft hands which exploit passive behaviors, especially as closed-loop control of soft-bodied robots is relatively immature 50 and control architectures often generalize over multiple hands, 51 therefore have little impact on design. 52 Saying this, developing controllers able to exploit passive behaviors is critical, so the framework aims to promote this.
Case Studies
In this section, we explore the designs of 11 different robotic hands, Figure 5. On one extreme, this includes those with rigidly defined mechanics, complex actuation, and direct sensory feedback, such as the pin-jointed shadow hand. 17 At the other end, we have examples with loosely defined mechanics, such as the RBO hand 2 with no joints and infinite degrees of freedom, 10 the modular interpenetrating phase composite (IPC) hand with elastic continuum joints,54,55 and the Wrist-driven hand, with no intrinsic actuation or sensing. 9

Table 2 provides an overview of some of the properties of the hands in Figure 5 which can be compared to a human hand. Joint types give a very broad description of the joints and how closely they resemble human joints. Within the hands of the same joint types, differing designs of bones and ligaments have a significant effect on the passive ranges of motion, listed in the compliant degrees of freedom column.
Overview of Selected Anthropomorphic Robot Hands, Figure 5
DoF, degrees of freedom; IPC, interpenetrating phase composite.
Hand tasks summarize the higher level behaviors of each hand. The different tasks have different behavioral requirements in interact-ability, adaptability, controllability, and behavioral diversity. Manufacturing gives some insight to the techniques, associated cost, material choices, and other limitations of the practical implementation. Finally, passive features highlight the notable passivity-based hand paradigms exhibited.
Passive features are examples of mechanical elements which provide passive behaviors; here we define the different passive features of Table 2:
Underactuated systems can passively adapt their shape to the environment.
Hands with built-in joint compliance, especially in excess degrees of freedom like the abduction/adduction and axial rotation of the human distal-interphalangeal and PIP joints, are generally more robust and safer to operate, as well as having additional hand–environment interactions through conditioning.
Mechanical synergies, such as in the interconnected web of tendons in the human hand, 52 reduce the demand on the control system and provide passive coupling.
Environmental exploitation is an emerging paradigm, which treats the environment as an extension of the body 7 ; with sequential interactions and memory in the physical system, new behaviors can be generated.
Soft sensing is necessary for embedding sensors into the structure of the hand without interfering with the hand–environment interactions and exploiting the passive dynamics of the skin to respond to different stimuli. 44
The 11 hands can be analyzed by considering the different mechanisms by which passivity aids interactions through the framework presented in Framework section: Environmental Conditioning, Wrist Control/Reaching, Internal Actuation, and Hand Sensing.
Environmental conditioning
Environmental conditioning is an emerging paradigm. We see the environment being considered and exploited in new ways by different robotic hands. Eppner et al. 7 highlight the environmental constraint exploitation in human grasping. Some cases are then demonstrated with a compliant Barrett hand; the environment can simplify some grasps (surface constrained grasps) and enable other grasps (sliding the object to an edge or wall). Environmental constraint exploitation is considered core in the development of controllers which can fully leverage the capabilities of soft hands. 60 A common example is surface constrained grasps,51,61,62 with some works demonstrating controller generalization over distinct soft hand designs. 51
By considering the environment as an extension of the robot, limitations in the system can be overcome. An example of this is the Jamming Joint hand 63 (Fig. 6). This hand has anthropomorphic joints surrounded by jamming particles and has no internal actuation. Despite having no explicit finger position control and a single control valve, the posture can be set in high dimensionality by jamming the joints after interacting with the environment; the hand posture has been conditioned. With only these “pre-conditioned” postures, simple adaptive grasping of spheres is demonstrated.

The Piano-playing hand, 13 elaborated on further in section Case Studies: Wrist control/reaching, relies on a “conditional state” for the more complex interactions. The hand is placed in the environment of a piano; with no internal actuation, the hand can play a limited number of chords. However, functionality can be increased using the environment to change the hand's current “state,” for example, by pressing a key with the thumb, then moving the hand laterally, the thumb is abducted, and the remaining fingers can then interact with a new set of keys.
Integration of environmental conditioning into more functional hands can add redundancy, increase behavioral diversity,13,63 and simplify specific tasks by allowing passive adaptation to the environment. 7 It is impossible to explore this area without also relying on at least one other aspect outlined in this framework; there are no environmental interactions without some internal actuation or control of the wrist.
Wrist control/reaching
We consider wrist control/reaching apart from environmental conditioning, although the observations here are all seen with hand–environment interactions. Where environmental conditioning defines how the hand and environment interact, the wrist control and reaching motions allow us to exploit these different interactions to achieve desirable behaviors and complete tasks. Two hands that demonstrate this (the Piano-playing hand 13 and Wrist-driven hand 9 ; Fig. 7) are fully passive with no intrinsic hand actuation. As there is no internal actuation, these hands make the impact and effect of the passivity-based hand designs explicit.

The Piano-playing hand 13 uses anthropomorphic bones and capsule-like ligaments (Fig. 7). This relatively simple design can still generate diverse behaviors, seen by different piano-playing patterns, through anisotropic stiffness in each joint and exploiting interactions with the piano. The design also allows for single-piece 3D printing, which enables more customization of joint stiffness and rapid fabrication. However, there are some limitations with ligaments prone to wearing rapidly, low force capabilities, and the independence of joints which limits self-organizing behaviors. More recent work takes a modular approach for rapid customization of robust joints. The modular IPC hand 55 utilizes continuous, 3D printed, elastic joints with customizable 3D composites for variable stiffness.
The Wrist-driven hand 9 uses the same bone geometries as the Piano-playing hand, while incorporating more biologically accurate ligaments, and includes a passive tendon structure 12 (Fig. 7). The ligaments are stronger, tougher, and constrain the redundant gliding motions, allowing for more practical use. In addition, the passive tendons, with anatomical arrangement, couple joints within a finger together for more complex and nonlinear interactions with the environment. This hand has been shown to perform grasping, robust to size and shape changes of the object, with an open-loop wrist controller. 9 This is achieved by wrist-driven interactions between the passive hand and environment. By observing these interactions and exploiting the hand's passive adaptive behaviors, the interactions can be replicated on new objects with no need for additional training.
These two example cases solidify the need and capabilities from wrist control of soft hands, with impressive capabilities developed. Other examples also signify the requirement to move beyond classical grasp planning algorithms. Works such as: Della et al., 60 which realizes a link between postural synergies and environmental interactions; and Pozzi et al., 51 which develops new grasp planning methods designed for soft hands by identifying “closure signatures” to drive interactions and grasping. However, the capabilities for in-hand manipulation are limited, thus the remaining two elements of the framework must complement this highly fundamental aspect of passivity-based hand design.
Actuator interface/transmission
Figure 8 shows the mechanisms of the hands in Figure 5 with notable actuator interfaces or transmission systems. These hands show different degrees of anthropomorphism, some with anatomically correct bones and ligaments, although all with some degree of underactuation or synergy based transmission.

We differentiate underactuation and mechanical synergies here. For a tendon driven finger: the posture could be controlled by a single tendon coupled to all the joints (underactuated) or each joint could be driven by individual tendons coupled to a single actuator (synergy); both cases may have the same motion until an external force is applied. Underactuation introduces some compliance and passive adaptations. Synergies operate on the hand in parallel, so combining multiple synergies results in new postures. This can be achieved with muscle activation patterns or by physical connection patterns. There is some element of both in the human hand. 48
The design of the transmission system determines many of the hand's behaviors, from active ranges of motion, force transmission, and efficiency. In an underactuated system, the passive transmission design can also couple external interactions or internal passive forces between multiple joints, contributing to passive ranges of motion and the stiffness modulation.
The RBO hand 210 is the only hand, of Figure 8, not tendon driven. Each finger is a continuous pneumatic actuator with infinite degrees of freedom. This is, naturally, extremely compliant and exhibits excellent versatility with shape adaptation when grasping objects. However, this extreme compliance limits the force and precision capabilities.
The Pisa/IIT softhand 11 shows great adaptive grasping capabilities with only two actuators. The dislocate-able rolling joints allow good ranges of motion and are highly robust to impacts and uncertainties in the environment. The actuation is also unique, with a single tendon running through each finger in series. By actuating either end of the tendon, the internal friction results in separate postures, which can be mixed. 19 These synergies allow diversity of hand postures with very simple control, and the underactuation significantly improves shape adaptation when grasping.
The choice of tendon routing has a significant impact on the performance of hands. The FLLEX hand 57 is unique in the use of joint lubrication and large moment arms. The tendons are routed over the joints with virtual external circle pulleys. By encapsulating the whole finger and filling with lubrication, the tendons themselves also move with very little friction through the structure.
The final three examples, the DLR hand, 56 Çulha hand, 58 and Xu hand, 42 have very different designs, but similar transmission concepts taken directly from the human finger. The DLR hand deviates the most in joint design; these have more constrained motions which are less compliant but have better precision relative to the Çulha hand, which uses anthropomorphic joints and ligaments. The Çulha hand is challenging to control with high tendon friction, although it has been shown to have human-like ranges of motion and can interact with the environment in more diverse ways. 64
The Xu hand is the most complex in construction with a more anatomically correct extensor mechanism and improvements in the joint design for better strength and wear resistance. 31 This hand uses up to five actuators per finger for full posture control with teleoperation, with which it has been shown to perform some in-hand regrasping. To ease control, the number of actuators has been reduced by coupling joints which rarely need to be controlled independently, such as the joints in the little and ring finger.
As demonstrated by these examples, methods of internal actuation for soft hands facilitate an increased range of behaviors compared to fully passive hands and more rigid/constrained hands. However, as shown in Figure 8 and in the discussion of the hands, this is at the expense of the complexity in manufacturing and fabrication. In some places, the fabrication limits the ability to fully utilize or further develop the techniques for internal actuation.
Notably, recent developments in closure models for soft hand grasping trend toward simplicity and allow passive behaviors to account for more complex interactions. 65 Closure models based on synergies greatly reduce down complexity of controlling internal actuators.60,66 Others exploit the shape adaptability of soft hands on favorable recognizable geometries within an object. 67 This is informative for design of soft hands; many complex tasks can be solved with simple actuation of a soft hand. How the actuators connect and allow for exploitation of diverse passive behaviors is critical.
Passive dynamic sensor interface
The final element of this framework is the ability of passivity to assist in sensing and perception.
The Shadow hand 17 and ACT hand are two of the more advanced anthropomorphic hands, which utilize embedded sensing for feedback control with tactile and/or postural data. 68 The ACT hand has more anatomical features, including its crocheted extensor hood. 49 The Shadow hand has distributed tactile sensors which can be used for some force control (Fig. 9). However, both these hands lack the passive elements discussed above; the ACT hand lacking embedded tactile sensing and the Shadow hand using rigid sensing arrays. In addition, both these hands have relatively rigid mechanisms with well constrained motions. These hands both demonstrate the cost of the raw integration approach with actuation and sensing without consideration of the passivity-based hand, both in the monetary and computational sense.

There are limited examples of full hand soft sensing. The RBO hand 210 equipped with redundant soft strain sensors has been demonstrated to detect objects during manipulations and even grasping failures with relatively few number of sensors. 69 These kind of embedded soft sensors are more challenging to manufacture in a hybrid soft/rigid hand, as seen by the sensorized finger made by Thuruthel et al. 70 (Fig. 9). This hand integrates soft strain sensors with an anthropomorphic skeletal structure and is able to perform some proprioception and force control, 50 although is limited by the number of receptors that can be integrated, the localization, and the poor performance of the sensors individually.
There are alternative methods for sensing of soft structures, for example: the PneuFlex actuators of the RBO hand 2 with an integrated microphone can detect the force and location of external interactions. 71 Vibrations are modulated as they propagate through the air chamber and finger tissues; this gives each interaction a signature, the greater number of unique signatures able to be generated within the soft finger structure increases the sensing capabilities.
These examples barely scratch the surface of sensing. There has been significant stand-alone development of soft sensing solutions and e-skins; however, integration is a key issue into compliant robot applications. 72 The primary limitation here is the receptor density in a soft skin, both from a manufacturing standpoint and from the electrical interface. The other challenge here is the sensor morphology, which governs how physical stimuli generate a measurable signal. 23
High density of receptors with redundancy allows limitations, such as drift and nonlinear response even seen in biological skins, to be overcome.72,73 There has been some investigation into this for closed-loop force control in an anthropomorphic finger. 70 Using this approach, it is shown how, given a dense and distributed sensor network and using any kind of recurrent neural network architecture, various tactile sensing capabilities can be achieved for their corresponding range of interactions.
Control of sensor response can allow us to better discriminate between different stimuli, whether from control of the hand–environment interactions to amplify the desired response 74 or by actively controlling the morphology to sense different properties. 75
In summary, exploiting a passive soft body for sensing and perception offers perhaps the biggest challenge in the passive hand framework and is the area least explored. Like internal actuation, it provides additional fabrication and design challenges; however, the introduction of passive systems into sensory systems does perhaps offer one way to overcome some of the challenges in scaling up and implementing soft sensing.
Comparison and design trade-offs
In these case studies we have seen vast differences in design. We have described these hands through the lens of a framework focused on passive design, looking at hands which push development of the different aspects, even if not explicitly designed that way. The highly interactive hands with low, or zero, degrees of actuation have a different set of capabilities to the extremely compliant continuum hands and the rigid highly-actuated hands. These capabilities are explained by their underlying passive behaviors, where different sets of behaviors enable functionality for different classifications of tasks. Hybrid rigid-soft designs maximize behavioral diversity.
There are trade-offs between the emerging passive behaviors. Higher passive ranges of motion introduce buckling modes, which decrease the range of interactive forces; RBO hand 2, 10 modular IPC hand, 54 and piano-playing hand 13 versus Xu hand 42 and shadow hand. 17 Increased shape adaptability greatly eases control in general grasping tasks; however, for more niche or dexterous tasks, where fine control of independent joints is required, the interconnected joints are a detriment to controllability; Pisa/IIT softhand 11 versus DLR hand. 56 These trade-offs are exacerbated by practical limitations in design and fabrication. Without a task specification when designing these hands, it is unfeasible to know the optimal behaviors. However, we can instead choose to optimize behavioral diversity.
Complexity of hand design can be reduced. This greatly simplifies manufacturing and often improves controllability, piano-playing hand 13 versus wrist-driven hand. 9 The complex joint behaviors can still be generated with modular design and composite materials: modular IPC hand. 55
Comparing the wrist-driven hand 9 and Çulha hand, 58 we see how the combination of differences in bone geometry, ligament design, and tendon routing can alter behaviors, which can increase or decrease performance for specific tasks. The wrist-driven hand has better passive shape adaptation, although has a lower range of joint stiffness to exploit. Both of these hands have a similar range of behavioral diversity. Instead, comparing the wrist-driven hand to the piano-playing hand, 13 the greatest difference is the lack of tendon routing of the piano playing hand, which greatly reduces behavioral diversity as interactions can no longer be coupled over multiple joints.
In the case of the ACT hand, 49 there has been great focus on replicating anatomical tendon routing, although the bone geometry and ligament design lack in passivity, resulting in a hand which is challenging to control and lacks behavioral diversity. 59 Therefore we should strive for balance between the different design aspects.
Analysis of Design Methodologies and Open Challenges
The performance of current robotic hands is greatly limited compared to human hands. We see this discrepancy across all four levels outlined in Case Studies section. Passive dynamics is the lowest level of design and control, upon which additional functionality is built upon. Therefore, limitations of the fundamental passive design influence these other areas. In this section, we explore the open challenges and potential new paradigms to exploit passivity in robotic hands.
State-of-the-art robot versus human hands
We have outlined the physical differences between robotic hands and human hands and how these contribute to the differences in behaviors and performance we see. One method of closing this gap is to produce more biologically accurate hands. In this area, we are limited by materials, design, and fabrication techniques. 76
In their current state, synovial joints in robotic hands provide the most benefit to tasks requiring delicacy and complex interactions with the environment, such as artistic and sensory tasks 13 and less dexterous in-hand manipulation tasks such as adaptive grasping and regrasping. 42 However, the limited force capabilities and rapid wear make these joints currently ill-suited for long-term general-purpose use, for example, social and kitchen helpers, or more heavy duty tasks, for example, agile manufacturing.
While improving materials and fabrication techniques is critical for more functional and scalable hands, to go beyond incremental improvements in performance requires a better understanding of complex passive behaviors in soft hands.
Improving and exploiting passive design
This framework promotes a more holistic view of the hand design. By framing it in terms of interacting systems, we can more clearly see in which areas developments are needed, as well as some possible solutions.
We propose the following four areas to develop and exploit passive behaviors: reframing design, with a focus on interactions and observable behaviors rather than direct imitation; understanding growth and codevelopment to take advantage of this reframed design and new rapid fabrication techniques; exploitation of wrist control to drive more diverse interactions and overcome inherent limitations; and finally integration of actuation and sensing directly into the hand with much greater consideration of the passive dynamics.
Reframing design
Directly copying the structures seen in nature can produce great results, although as complexity increases it becomes more and more difficult to accurately capture what contributes to the success observed; the human hand behaviors emerge from the complex, interacting physical components.
The robotic hands with novel design reveal more than conventional designs; the RBO hand 210 and Pisa/IIT softhand 11 both have unconventional actuation, although they exhibit excellent performance within their task specification. The takeaway is that it is not necessary to copy the exact anatomical structure to see great performance improvements. Instead, we should replicate the observable behaviors of the hand. With this behavioral-based bioinspiration, we can leverage current fabrication techniques and materials, some with superior mechanical properties than living tissue, to develop more general-purpose hands with physical capabilities approaching human hands.
The challenge with behavioral-based bioinspiration is twofold. First is the measurement and benchmarking of low-level hand behaviors, such as passive ranges of motion and stiffness, since these are complex with high dimensionality and time/posture variations. The field of haptics can greatly assist with this. 44
The second issue is encoding of design parameters to achieve these behaviors. Where simulation is unfeasible, rapid design iteration is a potential solution. We have seen some incremental improvements in rapid hand design and fabrication, such as digital 3D printing of rigid and soft plastics13,77 and design principles for soft/rigid hybrid structures. 78 To make a significant breakthrough requires a greater paradigm shift, combining 4D printing approaches, 79 computational design and rapid physical design iteration 77 for optimization, encoding, and fabrication of passive behaviors.
Finally, recent trends in the control of soft hands, particularly those exploiting environmental constraints and closure models which exploit passive behaviors,7,51,60 can in-turn inform design of the passive hand. These control and planning strategies so far have been developed independent of soft hand design. 51 However, these control strategies can provide more quantifiable design feedback and highlight favorable behaviors worth developing, for example, the scoop grasp and corresponding developments in palm design. 80
Understanding growth and codevelopment
A major challenge in robotic manipulation is the cognition system. The human hand evolved alongside the brain. 81 As the complexity of the hand increased, so did the systems controlling the hand. Therefore, while the cognition and control system is critical, development of the underlying “intelligent” body should be regarded with as much importance. In a similar way, we can perform developmental learning with varying physical hand structures, from the rapid design iteration discussed above where the complexity can be increased over time to enable improved performance to interact with and understand the environment. 82 These kinds of techniques may be essential for training of general-purpose hands.
The human hand grows and adapts over time. This is necessary from a biological standpoint, whereas robotic hands can be built and manually repaired. However, growth and self-healing is an exciting and emerging field in robotics.83–85 Growth, potentially through bioprinting, is a potential solution to fabricating complex passive structures. 83 Self-healing can aid in longer term use and adaptations over time to better suit the environment.
Exploiting wrist control
One of the main advantages of a soft hand is the ability to interact with the environment in diverse and adaptive ways. 13 These interactions are often driven by reaching motions and control of the wrist, rather than intrinsic hand muscles, as seen in the Wrist-driven hand. 9 Wrist control and exploiting these environmental interactions can allow physical limitations to be overcome, such as picking flat objects off a table by sliding them to the edge. 7 It also exposes the fundamental capabilities and limitations of the physical structure.
Current research into reaching motions which exploit environmental interactions is limited. Generally, a few cases are programmed or learned.7,9,51 A significant challenge in this area is training, due to the sheer quantity of different interactions and exploits which can be used when completing different tasks. The Wrist-driven hand shows some ability to transfer skills from a trained task to a new situation, although it is a long way from autonomy. 9
Integration of actuation and sensing
As seen in the case studies, there has been a lack of development in the passive dynamics of actuation and sensing interfaces. In actuation there has been more, with many designs being explored with different tendon configurations, routing, and actuator coupling. Actuator transmission is critical, especially when coupling with high degrees of freedom many actuators. 86 Underactuation and physical synergies can improve the efficiency of force transmission and reduce the complexity of control required.11,19,22 There has been limited integration of these into complex and compliant systems. 5 While we can imitate the transmission structure in human hands, a better understanding is required through a more integrated approach to design, focused on replication of behaviors.
Similarly, the sensors should be considered as another critical aspect of the hand, the sensor morphology. 23 While development of the soft sensing receptors themselves is a significant challenge, their integration into the hand can have a significant impact on the performance and functionality. 47 This integration and passive dynamic conditioning of tactile and proprioceptive information should not be overlooked. Embedding soft sensors into the passivity-based hand, especially in high density, is currently limited by fabrication. One method of simplifying fabrication is the use of mechanoreceptors and passive dynamic conditioning to allow multimodal sensing and sensor fusion with only a single type of sensor.43,72
Essential related challenges
There remain other associated challenges with improving robotic manipulation. We have so far explored the passivity-based hand design and interfaces with the surrounding systems. However, development into these surrounding systems is also essential.
Actuators and passive behaviors complement each other, although the performance of actuators can be improved independently in terms of power density and efficiency, 87 especially with soft actuators.88,89
The soft sensors themselves are another critical area. 6 Soft-sensing receptors have many undesirable characteristics, including nonlinear time varying responses and high latency; these can potentially be overcome with redundancy. 73 Then the main challenge is of scale, being able to integrate and readout the vast number of sensors required. 70
Higher level decision-making and task planning is also an unsolved problem, especially in changing environments. There has been some research taking into account changes in the environment, but either have a limited number of cases to look out for 7 or the higher level decisions such as which grasping motions, out of the numerous trained, to use. 9 Whether this is solved by “intelligence,” or if sophisticated perception coupled with a bank of prior knowledge is enough, is not certain.
Evaluating performance
Finally, a key requirement, to drive forward these techniques, is the need for a comprehensive and agreed upon manipulation benchmark to provide a more nuanced comparison of robotic hands. This is especially true for the development of passive hands, which have few existing benchmarks.
When designing a hand for a specific task environment, benchmarking becomes more straightforward as there are clear performance metrics and a bounded set of interactions; this can then inform the optimization of passive behaviors. This is seen in benchmarks such as the YCB Grasping and Model Set 90 and the OpenGRASP benchmark 91 ; the limitation of these is the difficulty in comprehensively covering the desired task environment without becoming bloated and unwieldy with the number of unique tasks to perform. In addition, benchmarking results from these are heavily dependent on the hand's controller. While arguably the hand and controller should be developed together, it is useful to be able to evaluate them independently.
When designing general-purpose hands, for prosthetics or autonomous robots in the real world, benchmarking is more challenging as the task-environment itself is potentially unbounded. While there have been some attempts to define the “most useful” behaviors, such as the most common grasp types in the Cutkosky grasping taxonomy, 92 these are subjective and a major utility of the hand is its versatility in tasks well beyond use in only the most common.
For developing general-purpose hands with arbitrary task specifications, the best option is developing a hand with the greatest behavioral diversity. In addition, rather than defining and optimizing the most “useful” behaviors as those utilized in the most common task, “useful” behaviors should be those which are easily exploited, allowing cheap control. 93 A benchmark must then incentivize behavioral diversity with simple control inputs.
There exist some benchmarks which measure lower level behaviors and give a score based on diversity without relying too heavily on complex controllers. The Kapandji thumb test 94 is a popular example, which gives a score based on the range of motion of the thumb. Taxonomies of grasping92,95 and manipulation 96 can also be used as a benchmark, which encourages behavioral diversity to an upper bound. These tests still lack benchmarking of passive behaviors. A low-level interaction-based benchmark is needed, rewarding higher passive range of motion, passive force and damping modulation, unique sensor responses, and redundancy in all of these.
Conclusions
In conclusion, the soft hand exploiting diverse passive behaviors is fundamental in achieving, or surpassing, human manipulation.
From a biological perspective, and from robotic case studies, we show numerous advantages of passivity which fall into two broad categories: interact-ability/self-organization and behavioral diversity. Interact-ability and self-organization encompass properties, which reduce the demand on the surrounding systems. This includes grasping with passive adaptation, which reduces control complexity, or the physical conditioning of sensing data, which can reduce the computational load for perception. The second category, behavioral diversity, enables these self-organizing behaviors to be leveraged in a wider range of tasks. Although passivity does have its limits, by mastering the underlying passive soft hand behaviors we can achieve a far higher performance ceiling when augmenting with actuation, sensing, and cognition.
To provide a theoretical and philosophical means to understand the role of passivity, and therefore drive its development, we have introduced a framework for passive soft hands. In this framework, we identify the fundamentals of passive design and its relations with four key building blocks: the environment, the wrist, the actuation, and the sensors. We demonstrate how this framework can be used to describe and analyze current state-of-the-art hands. By developing this framework, we aim to identify areas which need further investigation, most notably environmental conditioning and sensing, and also provide methodologies for approaching the future design and development of robotic hands.
Footnotes
Acknowledgments
Thanks to the EPSRC Doctoral Training Programme Studentship and Arm Ltd. for funding this project.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work is supported by EPSRC Doctoral Training Programme Studentship (RG99055) and Arm Ltd.