
Abstract
Soft actuators have received extensive attention in the fields of soft robotics, biomedicine, and intelligence systems owing to their advantages of pliancy, silence, and essential safety. However, most existing soft actuators have only single actuation elements and lack sensing. Therefore, it is difficult for them to perform complex motions with multiple degrees of freedom (multi-DOFs) and high precision. This article reports a miniature columnar dielectric elastomer actuator (DEA) with multi-DOF actuation and sensing, which was fabricated with an electroactive polymer acrylic film (Very High Bond [VHB] acrylic film by 3M Company) and carbon black grease electrodes. The arrangement of the simulation electrodes on the VHB was optimized to realize multi-DOF actuation, and the sensing electrodes were configured on the outer part of the DEA to realize real-time sensing. The results showed that the soft actuator can achieve all-round actuation through the selective power of the stimulation electrodes with a controllable voltage. The maximum bending angle and axial strain of the actuator reached 50° and 13%, respectively. Moreover, the deformation modes, direction, and quantity could be precisely measured using the integrative sensing function. In addition, to demonstrate the advantages of the proposed actuator, a manipulator with multiple actuators was designed and controlled to realize different actions of screwing and grasping with sensing. This research is useful not only for the design of multifunctional soft actuators but also for the development of soft robots with flexible, complex, and precisely controllable motions.
Introduction
Recently, soft robotics have attracted extensive interest because of the inherent structural compliance and movement flexibility. 1 They are expected to generate considerable changes in extreme environmental survival,2,3 medical assitance,4,5 and bionic design.6–8 Operative actuators are key soft robotic components to realize locomotion,9,10 manipulation, 11 or other tasks.12,13 Along with the rapid development of materials and related technologies, various smart material-based soft actuators have been developed, including pneumatic actuation,14,15 shape memory materials,16,17 electroactive polymers,18,19 hydrogels, 20 and liquid crystal elastomers. 21
Although these actuators can generate similar motion and force to those of biological muscles, 22 it is difficult to present complex and flexible movements by combining multiple simple actuators.23–26 The multi-degree of freedom (DOF) soft actuator is an ideal candidate for improving the flexibility and integration of soft robots. Recently, soft actuators with multi-DOF motion have made significant progress. Most are developed by integrating pneumatic actuation with variable stiffness design.27–31 Moreover, a multi-DOF deformation and large output force can be obtained with these actuators; however, the response speed should be further improved for the application requirement of flexible and efficient motion. In addition, deformation sensing is an essential component for accurate, controllable soft actuator motion.
To realize the sensing function of soft actuators, researchers, on the one hand, have attempted to develop some multifunctional actuators that leverage the sensing property of actuation materials (e.g., conducting polymers).32–35 However, these methods generally require complex algorithms to separate the sensing information from the comprehensive actuation signal and actuator deformation; furthermore, the sensing precision would be rather limited and unsatisfactory. On the other hand, researchers have developed a variety of soft sensors with high precision, which could be integrated with a soft actuator to realize sensing.36–39 For example, some soft sensors based on different sensing mechanisms, including fiber optics,40–42 triboelectricity, 43 and piezoresistivity,44–46 have been developed to realize precise stress and strain sensing.
In addition, a few studies have attempted to integrate soft actuators with sensors to achieve simultaneous active motion and perception functions. Relevant studies have demonstrated that a flexible sensor network can be integrated into an actuator to realize the sensing function through 3D printing, embedding, or multilayer lamination.47–51 However, these simple physical integrations of heterogeneous materials not only involve complex fabrication processes but also have potential stress concentration, modulus mismatch, and unstable adhesion issues on the interface. 52 Therefore, it is urgent to explore more efficient integration methods to realize multi-DOF actuation and high-precision perception.
Fortunately, dielectric elastomers have attracted extensive attention as attractive functional materials for soft robotics (Fig. 1d and Supplementary Table S1).53–57 In addition to being used to fabricate multi-DOF soft actuators by virtue of a fast response speed and high energy density, they can also act as an ideal soft sensor material owing to the sensitive piezoelectric property.

Biomimetic design and concept of the soft actuator.
In this study, a multi-DOF soft actuator with sensing properties was developed based on the same functional material (electroactive polymer acrylic film [Very High Bond (VHB) acrylic film by 3M Company]) and an integrated fabrication method. Because of the effective actuating and sensing layer bonding of the proposed actuator, the disadvantages of the device separation and the modulus mismatch resulting from differing materials could be avoided, to ensure sensing accuracy and stability. In addition, owing to the homogeneity of the actuation and sensing units, the sensing layer could be transformed into the actuation layer when necessary, to ensure adequate actuation force and deformation.
The results demonstrated that the developed multi-DOF soft actuator not only had the accessibility of all-round bending and axial elongation that expands the deformation range and movement accessibility but also possessed a fast response speed of up to 30 Hz. In particular, the integrated sensor could accurately sense the actuator bending direction and angle in real time. Finally, a manipulator designed with multiple proposed actuators was precisely controlled, and its various applications were demonstrated, including screwing a nut and grasping different objects with sensing, which verified the effectiveness of the proposed method of integrating actuation with sensing. This work may provide an effective approach for designing multifunctional actuators with actuation and sensing to expand the applications and advance the development of soft robots.
Materials and Methods
Multi-DOF deformation and sensing integrated design scheme
Figure 1a and b provides a bionic schematic diagram of a multi-DOF soft actuator, which is mainly composed of a dielectric film layer, a conductive layer, a compressible spring, and an acrylonitrile-butadiene-styrene (ABS) plastics end cover. To achieve multi-DOF bending, multiple rows of electrodes are uniformly wound around the spring, and bending at different angles and amplitudes can be achieved by controlling the power-on order and amplitude.
By simulating the finger function of human body (Fig. 1c), an integrated scheme of actuation and sensing is proposed (Fig. 1e). The sensing layer is located outside the actuating layer, and there is a passive layer for electrical isolation in the middle. When the actuating layer deforms, the sensing layer resistance changes, providing real-time feedback according to the resistance change. To improve the sensing accuracy, the distance between the actuating and sensing layers must be calculated accurately to ensure the coincidence of the center line.
Soft actuator fabrication method
The dielectric elastomer actuator (DEA) material was acrylic film VHB4910 produced by 3M. Carbon black grease 864–80G was used as the conductive layer material. Figure 1e shows the production details (Detailed manufacturing method in Supplementary Fig. S1).
First, the VHB film was fixed on the quilted structure for biaxial prestretching. Second, the driving and sensing layers were formed on the VHB thin film according to the calculated region. An electrode signet with a specific width was fabricated using PDMS (Sylgard184), and the carbon black was transferred to the VHB film to make the standard electrode. Third, the spring was fixed on the support frame with a certain compression ratio, and both ends were encapsulated with ABS end covers. The VHB film coated with carbon black was evenly wound around the compression spring to form a multilayer columnar structure. Finally, the excess VHB film was cutoff outside the ABS end cap, and both ends were fixed with a heat-shrinkable tube. Bending motion in different directions could be realized by controlling the actuator energizing sequence.
Data measurement and processing
Bending angle: the soft actuator was driven by a high-voltage power supply module (DW-P303–1ACDF; Dongwen, China). A high-speed camera recorded the bending angle of the actuator in real time. First, ImageJ software was used to measure the initial angle
Displacement measurement: the laser displacement sensor (MT30; Mileseey, China) was located directly in front of the axial direction of the actuator. The initial distance l0 from the end of the actuator to the laser sensor was measured. Then, the distance l1 between the actuator and the sensor under different actuation voltages were measured. The axial displacement was defined as the difference between the l0 and l1. Finally, the axial displacement under each power voltage was repeated for five times to get the average value and error bar.
Output force measurement: the cantilever beam weighing sensor (LDCZL-BLA; LOADING SEN, China) and a high-precision weighing digital display device (XSB5; LOADING SEN, China) collected the output force data. First, one end of the actuator was fixed, and the other end was placed on the cantilever beam measurement point. Then, after the power had been energized, the actuator deformed and pressed the cantilever beam, causing a change in the instrument value. The output force measurement at this voltage was repeated for five times to get the average value and error bar.
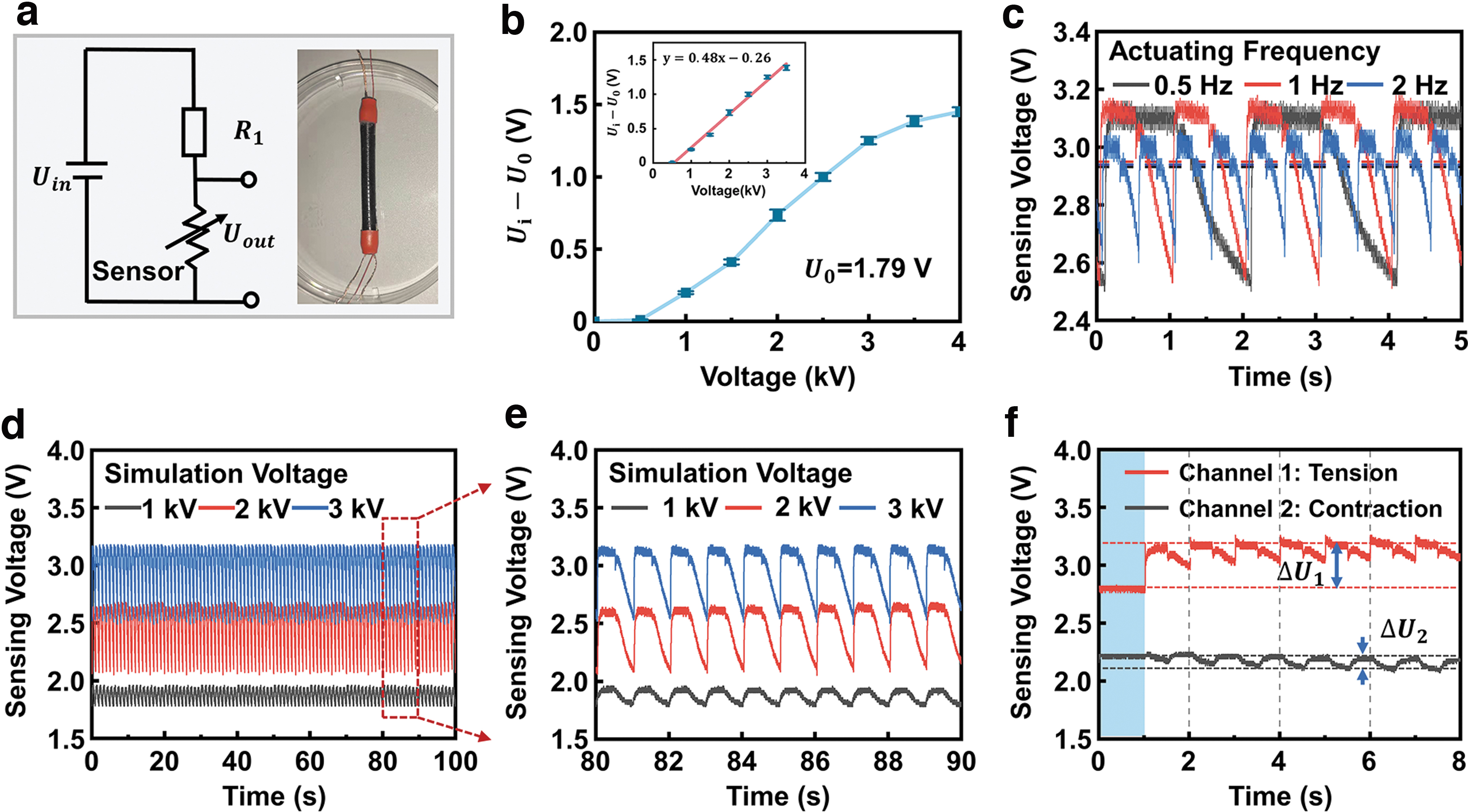
Sensing measurement: First, one end of the actuator was fixed, the other end was suspended. The actuating circuit and the sensing circuit were set up, respectively. The design of the sensing circuit was as follows: The sensing electrode and a voltage resistor (500 MΩ) were connected in series to form a voltage divider circuit (Fig. 4a). Then, the circuit was connected in series to a 5 V DC preset power. A digital phosphor oscilloscope (DOC7054C; Tektronix) was used to measure the component voltage of the sensor. When the actuator was powered, the changing of the component voltage of the sensor can be obtained with the oscilloscope in real time.
Manufacturing method of soft gripper: First, the base structure of the soft gripper was designed with the 3D drawing software SolidWorks. Then, the 3D model was inputted into a commercial 3D printer (N2 Plus; Raise3D, China) to fabricate the 3D structure. Finally, three soft actuators were assembled onto the printed base structure to form the soft gripper.
Results and Discussion
Soft actuator performance characterization
According to Maxwell,
58
the area expansion strain of a DEA is given by
where Sz is the area strain,
Figure 2 characterizes the two-DOF actuator performance. When one electrode is energized, the film area increases, resulting in asymmetry; thus, the actuator shows bending deformation (Fig. 2b and Supplementary Videos S1 and S2). When the number of winding films is constant, the bending angle increases with increasing driving voltage, and the maximum bending angle can be close to 50° at an actuating voltage of 5 kV. The bidirectional bending characteristics of the actuator with different turn numbers varied with the voltage, as shown in Figure 2c and Supplementary Fig. S2. At the same driving voltage, the maximum angle of bending from left to right is basically the same, with only 1–2° error.

Performance characterization of two-DOF actuator.
The active layer number N is a key factor affecting the actuator deformation. Theoretically, when N is too small, the driving force generated by the film cannot overcome the stiffness of the spring itself. When N is large, the stiffness of the whole increases, and the stress between film layers increases, affecting the overall bending degree. Figure 2c presents the experimental results. With increasing N, the bending angle increases and then decreases, reaching the maximum of 49° at N = 6.
Figure 2d illustrates the influence of the driving frequency on bending performance. The actuation bending angle decreased with increasing actuating frequency. This phenomenon may be attributed to the following two aspects. First, the interval between two continuous pulses is insufficient for the spring to recover. Second, the dielectric elastomers have obvious time dependence. Under cyclic loading, the viscoelastic behavior of DEA usually leads to viscoelastic creep and hysteresis.64–66
In this work, when the actuation frequency was high, the deformation did not return to zero owing to the viscoelasticity of the VHB film. Therefore, the effective bending angle decreased with increased driving frequency. An effective bending angle can be obtained at driving frequencies below 5 Hz. For N = 6, the maximum bending angle can reach 32° when the driving frequency is 5 Hz. Although DEA viscoelastic brings challenges to accurate actuator tracking control, the viscoelastic creep and hysteresis of DEA could be corrected by the further development of corresponding control methods.
When a high voltage is applied to the two electrodes, the film on both sides deforms simultaneously, and the actuator produces axial elongation motion (Supplementary Video SV2). Figure 2e shows the elongation characteristics. The elongation increases and then decreases with increasing N. When N = 6, the elongation reaches a maximum of 5.8 mm, corresponding to an axial strain of ∼13%.
Furthermore, we measured the output force of the soft actuator. Although the designed driver is small, the experimental results indicate that the effective output force is considerable, as shown in Figure 2f. The blocking force gradually increases with increasing N and output voltage, and the maximum output force can reach 14 mN. In addition, the output force was large at power-on. For N = 6, the transient output force reached ∼25 mN. After some time, the output force remained stable. With proper use of this transient output force, the actuator can perform simple tasks.
To improve the deformation characteristics of the dielectric elastomer and expand the flexibility of the actuator, a multi-DOF actuator with three electrodes uniformly distributed around the spring was designed. This actuator could achieve all-round actuation through the selective power of the stimulation electrodes with a controllable voltage (Fig. 3 and Supplementary Video S3).

Performance characterization of multi-DOF actuator.
When N is 6, the bending angle on one side is greater than 30° (Voltage = 5 kV), which is smaller compared with the two-DOF soft actuator as the deformation area of the DEA is related to the area of the coated carbon black. Specifically, as the number of electrodes increases, the area of a single row of electrodes decreases, decreasing the deformation. In fact, the further increase in the number of electrodes will not lead to a continuous increase in the degree of freedom. When the electrode is 3, the degree of freedom of the actuator has reached the maximum, which is the optimal configuration (Supplementary Fig. S3 and Supplementary Video S4). In the future, the soft actuator bending deformation can be further improved by optimizing the electrode and film materials.
Soft actuator sensing characteristics
To detect the actuator bending deformation, we propose a design scheme based on a strain-type flexible sensor (Fig. 1). When the actuator is bent, the sensing layer resistance changes in tension, so the shape variable of the actuator can be fed back by measuring the change in the partial pressure of the sensing layer resistance. The strain sensor sensitivity is
where Ui is the voltage of the sensing layer, U0 is the initial voltage, and
Because the DEA can be deformed at high frequency, it was necessary to examine the frequency-following sensor characteristics. Figure 4c presents the results obtained using driving voltage frequencies of 0.5, 1, and 2 Hz. Because the actuator has a certain deformation loss under high-frequency driving, the peak partial pressure of the sensor is reduced at higher frequencies, but the mean values of the three frequencies remain basically the same. The sensor stability was further evaluated (Fig. 4d, e), revealing excellent cyclic stability.
Furthermore, by coupling the partial pressures of multiple sensing layers, the overall sensitivity can be improved and the bending size and direction of the entire drive can be sensed in real time. We fabricated a two-DOF soft actuator with two sensing channels. When the actuator is bent, the resistances of the two sensing channels are stretched and compressed. Figure 4f presents the experimental results, where the resistance partial voltages on the tension and compression sides increase and decrease, respectively.
The variation of the partial voltage between the two channels is slightly different, and the resistance subjected to pull changes more obviously than that subjected to compression, and the voltage increment
We further evaluated the real-time sensing characteristics of the two-DOF actuator. When the actuator was bent, sensing channel 1 was pulled, causing the partial voltage to continue to increase, and sensing channel 2 was compressed, resulting in a voltage drop (Fig. 5a, b). When a high voltage was applied to the two columns of the actuator simultaneously, the actuator elongated axially. Therefore, the two sensing channels were pulled simultaneously, and the partial voltage gradually increased (Fig. 5c, d). Thus, the strain sensor can respond synchronously to the actuator deformation characteristics. This zero delay is essential for accurately controlling soft robot motion.
Sensor performance characterization.

Real-time perception characteristics of soft actuators.
Potential applications of soft actuators
The proposed soft actuator can produce large deformations and sense the shape variable. Therefore, by modular assembly, soft structures with different functions can be designed to perform complex operation tasks. First, we fabricated a three-finger gripper using one-DOF actuators. The one-DOF actuators had large deformation, and when the voltage of the actuating layer increased, the transient output force increased. Using this feature, an effective torque could be generated around the nut (Supplementary Video SV5). The actuator frequency was set to 1 Hz, which can continuously generate a transient output force. As shown in Figure 6a and b, the gripper successfully screwed the nut.

Soft gripper performance demonstration.
The traditional soft gripper only has one DOF of deformation and can only grip objects smaller than its own working range. The two-DOF soft gripper can effectively overcome this drawback. By controlling the power-on sequence of the actuator, the three-finger gripper can bend inward and outward to expand the operating space, thereby grasping larger objects. We successfully achieved nondestructive grasping of flowers using a two-DOF soft gripper (Fig. 6c, d and Supplementary Video SV6). For smaller flowers, only the outer electrode was activated, and the three-finger gripper was bent inward. For large flowers, the inner electrode was activated to make the three-finger gripper bend outward to expand the operating space, and then the outer electrode was activated to bend inward (Supplementary Video SV7).
In grasping, it is important to ensure that the captured object will not be damaged due to overload. We created a soft gripper using an actuator with perceptual characteristics and compared and analyzed the grasping effects of the three-finger gripper on soft and hard objects (Fig. 7 and Supplementary Video SV8).

Perceptual grasping characteristics.
When grasping a soft object, the actuator deformation gradually increases with increasing actuator voltage. When the gripper grasps the object and continues to increase the driving voltage, the object is deformed, so the sensing partial pressure continues to change until the actuator is damaged owing to the high-voltage breakdown. In contrast, for a hard object, the partial voltage of the sensing layer will remain almost unchanged with the increasing driving voltage when the gripper touched the object. Therefore, this method protects the grabbed object and reduces the damage caused by high-voltage breakdown.
Multi-DOF soft actuators also have the potential for use in soft robots. For example, a soft crawler can be designed by connecting multiple drivers in series, which can fully reproduce crawling. The parallel connection of multisection drives can be utilized to design multileg walking soft robots and can realize walking, jumping, and other motions by controlling the deformation of different drives. Applying the multi-DOF actuator to an underwater robot can realize fin swinging and produce the propulsive force for swimming. This type of multi-DOF soft actuator provides more possibilities for multifunctional soft robots. In addition, the proposed integrated driving and sensing scheme will promote the development of robots toward greater intelligence and integration.
Conclusion
We proposed a multi-DOF motion and perception-integrated soft actuator design method. By optimizing the electrode arrangement and the selective power of the stimulation electrodes with a controllable voltage, the soft actuator achieved all-round actuation. The maximum bending angle and axial strain of the actuator reached 50° and 13%, respectively. In addition, the actuator was composed of multiple actuation layers, which could ensure that normal actuation function in case of one of the actuation layers is dielectric breakdown.
Furthermore, actuators with real-time sensing were realized using the same material by integrated design and fabrication. The deformation modes, direction, and quantity were precisely measured. Due to the integration design that adopts the same material to realize the actuation and sensing functions, the sensing layer could be used as the actuation layer to realize the function conversion when necessary.
Finally, different manipulators consisting of multiple proposed actuators were designed and controlled to realize the nondestructive grasping of thin and fragile objects. However, the proposed actuators with integrated sensing in this work could perceive only the deformations, but not the output forces of the actuators. In further work, piezoresistive sensors will be adopted to soft actuators to realize the multidimensional displacement, rate, and force sensing. This work will be significant for the development of not only the multi-DOF and multifunctional soft actuator but also the relative fields, such as soft bionics, medical operation, and environment interaction.
Footnotes
Acknowledgment
The authors thank Prof. Liwu Liu for advice on actuation materials.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work was supported by the National Key R&D Program of China [2020YFB1313100], the National Natural Science Foundation of China [62003338, 61925307, and 91748212], the Nature Foundation of Liaoning Province of China [2021-BS-021 and 2019-KF-01-13], the China Postdoctoral Science Foundation [252311], and the State Key Laboratory of Robotics [2020-Z16].
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.