
Abstract
Snakes are a remarkable source of inspiration for mobile search-and-rescue robots. Their unique slender body structure and multiple modes of locomotion are well-suited to movement in narrow passages and other difficult terrain. The design, manufacturing, modeling, and control techniques of soft robotics make it possible to imitate the structure, mechanical properties, and locomotion gaits of snakes, opening up new possibilities in robotics research. Building on our track record of contributions in this area, this article presents a soft robotic snake made of modules that can actively deform in three-dimensional (3D) and rigorously studies its performance under a range of conditions, including gait parameters, number of modules, and differences in the environment. A soft 3D-printed wave spring sheath is developed to support the robot modules, increasing the snake's performance in climbing steps threefold. Finally, we introduce a simulator and a numerical model to provide a real-time simulation of the soft robotic snake. With the help of the real-time simulator, it is possible to develop and test new locomotion gaits for the soft robotic snake within a short period of time, compared with experimental trial and error. As a result, the soft robotic snake presented in this article is able to locomote on different surfaces, perform different bioinspired and custom gaits, and climb over steps.
Introduction
Mobile robots are promising tools for emergency response. However, it is not easy for traditional rigid robots to explore narrow, complicated, unknown, or dangerous environments, especially where first responders cannot enter during search-and-rescue missions.
Snake robots may be a solution for traversing these complicated environments. As very flexible and agile creatures, biological snakes evolved to move efficiently in different kinds of terrains because of their unique structure and locomotion gaits. In addition, the softness of snake bodies increases their adaptability and flexibility, which makes them compliant to contact with the environment. These features make snake-inspired robots suitable for search-and-rescue missions in uncertain and constrained environments.
This article presents the design, fabrication, verification, and real-time simulation of a modular three-dimensional (3D) soft robotic snake based on the two-dimensional pneumatic snake robot we introduced previously. 1 With three-degree-of-freedom (DoF) modules, the proposed snake robot can perform 3D locomotion instead of simply planar motion. Three different locomotion methods, lateral undulation, sidewinding locomotion, and step climbing, are presented and tested on different surfaces and with different numbers of modules. A simulation environment was developed in parallel using NVidia Flex, which is a particle-based simulation technique developed by NVidia Gameworks.
Snake robots have been created with traditional rigid structures. Hirose and Yamada 2 studied the kinematics of snake motion and developed multiple snake-like robots with active or passive joints and wheels. Choset's research group3–6 developed a rigid modular snake actuated by servo motors mounted in series, which is capable of multiple gaits, including climbing up inside a wall opening and raising its head to observe the environment behind an obstacle. Gravdahl's research group developed an underwater snake robot, propelling with eel-like locomotion. Crespi and Ijspeert7,8 developed a rigid snake robot actuated with DC motors. This robot can conduct planar locomotion with central pattern generator on land and swim in water. Transeth et al.9–11 developed a snake robot “Aiko,” which can do obstacle-aided locomotion in addition to frequently used locomotion methods like lateral undulation and sidewinding gaits. To increase adaptive functionality to complex terrain, Kano et al. 12 developed a decentralized control scheme, which enables the robotic snake to generate reasonable locomotion depend on surrounding environment.
Existing rigid snake robots are actuated using electrical motors and many discrete joints to approximate snake locomotion. However, this discretization with rigid joints is different from the continuous deformation of a biological snake. It requires many more segments of rigid links to create a close approximation of the body motion, which results in more weight, complexity in coordination of the redundant DoF, and increased energy consumption. In addition, rigid links have to be as short as possible to make sure they do not jam in tight corners, which reduces movement options for a rigid snake, particularly in narrow places.
Our previous work presented a pneumatic soft robotic snake, 13 which can conduct planar continuum lateral undulatory locomotion. Similar to other soft robots,14–16 our soft-bodied snake robot results in much more flexible, adaptive, and safe motion, emphasizing its potential as a search-and-rescue robot. Pioneering works 17 demonstrated a three-chamber structure pneumatic actuator able to bend in three dimensions. With similar structure, we design and fabricate a 3D soft robotic snake. To create anisotropic friction, which is necessary in serpentine locomotion, we utilize passive wheels. Godage's research group 18 designed a soft robotic snake without passive wheels, and fulfill the propulsion by inward and outward rolling locomotion. However, the velocity is limited, and the system require a considerable number of tethering tubes for pressure input. Another research work 19 utilizes kirigami pattern to create a novel “snake skin,” able to create anisotropic friction for snake-like robot.
However, for our snake structure, it is difficult to come up with a skin cover without eliminating the performance. We also developed a composite silicone rubber material to improve the robustness of 3D snake robot modules to increase their bending amplitude and performed preliminary tests with lateral undulation and sidewinding gaits of an early version of a 3D soft robotic snake comprising four of these modules. 13 In a separate study, we studied soft hybrid wave spring actuators, 20 used for soft manipulation systems to be able to carry large payloads without buckling. Based on these prior results, we present in this article, new soft snake modules with wave spring sheaths to develop a novel 3D soft mobile robot that can raise its head over obstacles and traverse over steps without buckling for the first time.
These new capabilities enable a broad range of new gaits and motions for a soft robotic snake. The design space is vast for trial-and-error experimentation. This motivates the requirement for a convenient simulator of our system, which would let us quickly design and test potential gaits. For rigid mobile robots, real-time simulations are easily performed using existing simulator tools, while for soft mobile robots with deformable structures, real-time simulation is an active research area because of the limitations in current simulation methods. Huang et al. 21 developed a discrete differential geometry-based numerical simulation method for limbed soft robots. The computational efficiency of this method enables it to fulfill real-time simulation for a star-shaped rolling robot. Duriez 22 presented a real-time finite element method-based simulation and used it as part of the controller to control a 3D silicone rubber soft robot inspired by a parallel motion platform.
In a recent work, we explored the potential of NVidia Flex as a real-time simulator for soft snake robots in two-dimensional only. 23 This system provides a powerful tool to seamlessly simulate hyperelastic structures and rigid bodies. Building on our experience, we present a real-time simulator prototype in this article, based on NVidia Flex to simulate our 3D soft robotic snake, which is a much more complicated soft robotic system. We use this method to build a real-time simulation and help us quickly develop and test new locomotion gait patterns for our soft robotic snake. To demonstrate the power of this method, we present experimental results that lets the robotic snake to go over a 7 cm step using a custom locomotion gait first generated in simulation and directly utilized in the real world without modification.
Contributions of this work include:
We present a 3D soft robotic snake with – a modular system architecture comprising identical modules with integrated 3D soft actuation, valving, and electronics; – wave spring sheaths that enhance the resistance against buckling and twisting when the snake modules are under large external forces. We demonstrate and verify different locomotion gaits and methods with the 3D soft robotic snake prototype, including – Lateral undulation, – Sidewinding locomotion, and – A novel step climbing locomotion, which is developed in the real-time simulation conveniently and rapidly as compared with experimental iterations. We present a real-time simulation for this complex pneumatic soft robotic system to provide an intuitive environment for more flexible design and assessment of various gaits with significant advantages of developing and testing in a rapid pace.
This article is organized as follows: In Materials and Methods section, we describe the design and fabrication methods of our soft robotic snake and wave spring sheath; In Results section, we demonstrate three different locomotion gaits with our proposed soft robotic snake platform, and we compare the locomotion path with our simulation results; In Conclusion section, we conclude this article with a discussion and future research directions; In the Appendix, we add more details about the graphics processing unit (GPU)-based NVidia Flex simulator.
Materials and Methods
Modular design
Our 3D soft robotic snake incorporates a modular architecture based on our previous prototypes, 13 as shown in Figure 1. The dimension of a four-segment modular soft robotic snake is listed in Table 1 Modular design allows broken modules to be easily replaced and repaired separately, increasing the maintenance efficiency and system reliability. In addition, the modular design makes it possible to scale the number of modules, which would provide redundancy. A greater number of modules is helpful especially for step climbing experiments.

Single module of soft snake robot (top); soft snake robot (bottom).
Dimension of a Four-Segment Modular Soft Robotic Snake
Each module consists of a pneumatic silicone rubber soft bending body with three embedded chambers, three solenoid valves, and a peripheral controller printed circuit board. The three valves control the air flow of the three chambers independently and the states of the valves are controlled by the peripheral controller. A main controller mounted in the head module connects to the peripheral controllers through an I2C communication bus to send desired values of valve duty cycles mapped from the target pressure. Peripheral controllers operate the solenoid valves with a pulse-width modulation (PWM) signal according to the received duty cycle, so that the chambers in each module can be actuated with a corresponding pressure.
Wave spring sheath constraint
Under unexpected external forces, silicone rubber modules will buckle even if silicone with relatively high elastic modulus is used, which limits the performance of soft robots. As shown in Figure 2 (left), the pressurized chamber buckles, elongating without bending the entire module. This limits the ability of the soft robotic snake to traverse obstacles and perform complex gaits or motions in 3D. For example, when performing step climbing locomotion, soft robotic snake modules buckle under the influence of gravity. As a result, locomotion cannot be performed as desired, reducing the maximum height the soft robotic snake can traverse.

Top-left: an example of a soft robotic module buckling in a cantilever configuration. The lower actuation chamber is pressurized while a downward force is applied to the tip; bottom-left: a fully integrated module and the wave spring sheath 3D printed out of NinjaFlex; top-right: snake robot made of five modules with NinjaFlex sheaths mounted; bottom-right: wave spring sheath with and without horizontal support 3D printed out of Objet FLX9085. 3D, three-dimensional.
We address this problem by encasing the snake modules in 3D-printed wave springs based on our previous research. 20 Wave springs consist of a stacked series of flexible waves and are traditionally used in applications where a traditional coil spring may be too large. We utilize this type of flexible wave to have a sheath for the snake module that can selectively extend, allowing the module to bend, while also resisting buckling. Flexible 3D printing allows us to modify this structure to conform to the contours of the bending modules, and we add horizontal supports to further resist buckling.
We made two different designs of sheaths shown in Figure 2, with two different materials, Objet FLX9085 and NinjaFlex. We observed that the Objet FLX9085 wave springs were expensive and prone to breakage, whereas NinjaFlex wave springs were more reliable and more elastic.
System architecture
The 3D soft robotic snake is a modular robot composed of at least three soft robotic modules mounted in series. The modules are connected with screws and spacers, as well as wires, tubes, and passive wheels located in short gaps between adjacent modules. We mount the main controller, an Arduino Pro Mini with Atmega328 chip, at the head of the soft robotic snake. Two 2-cell lithium polymer batteries (the voltage is 7.4 V) are mounted at the head and the tail, respectively, to power the control circuit and the valves and maintain balance. In addition, we add a Bluetooth module on the main controller to enable remote commands to switch between locomotion modes.
Results
Motion capabilities of soft robotic modules
We first performed experiments to evaluate the 3D soft robotic modules for their ability to generate the desired motions and to withstand reasonable external loads for realistic locomotion gaits of a 3D soft robotic snake.
Inflation and deflation
Thirty sets of experiments are conducted to test the inflation and deflation performance of the modules in bending, which provides us with dynamic response information relevant for the bending waves used in the locomotion gaits. During the experiments, the soft robotic module is inflated to bend in a step response, then deflated to recover after a certain amount of time, following a square wave pattern. Figure 3 shows the mean inflation and deflation curve with the shaded region representing standard deviation between experiments. Based on these experiments, we quantify the inflation and deflation time constants as between 0.23 and 0.44 s. To fully inflate and deflate the chambers as possible, for each chamber it would take 0.46–0.88 s. Thus, we confine the gait frequency in the locomotion experiments to be no higher than 2 Hz, so that there is a reasonable chance for the actuators to be fully actuated.

Left: inflation and deflation curve with shaded error region. (The left perpendicular line represents the time when signal input is applied, and the right perpendicular line represents the end of the signal input). The inflation pressure is 17 psi. Right: a bending module in testing.
Hexagonal gait
To achieve sidewinding locomotion, the soft robotics modules should bend such that their end-plates (tips) move in circular paths with a desired phase delay between adjacent modules. For ease of implementation and to increase computational efficiency, we approximate this ideal circular gait and develop a hexagonal gait which can be simply implemented by binary inflation/deflation for each actuation chamber without controlling the pressure, which would be required to achieve precise circular tip trajectories. Figure 4 shows that the tip trajectory of the modules performing the hexagonal gait is tracing a deformed hexagon projected on the spherical workspace of the module.

Left: circular datapoints represent the trajectory of the central point at the top end-plate (tip) of the module when performing the hexagonal gait. The trajectory, which also can be considered as the workspace, is a deformed hexagon on a (grid) spherical. Right: a soft robotic module in testing. The gray and white dots show the status of the three actuation chambers. gray dots mean inflated states and white dots mean deflated states.
Wave spring sheath
The goal of adding the custom flexible wave spring sheaths to the soft robotic modules is to increase the resistance to buckling under external force. We set up experiments to test the wave spring sheaths. A bending module with different kinds of custom wave spring sheaths mounted is set in a cantilever configuration with a downward tip load as shown in Figure 2 (left). We gradually increase the pressure in the lower actuation chamber, and measure the maximum module height and bending angle it can reach before buckling. As shown in Figure 5, the sheaths have significant effect on reducing buckling when pressurized actuators are under external force. In addition, the Objet sheath with horizontal supports is generally the best performer. However, under higher loads, it performs similar to the NinjaFlex sheaths. Given the advantage in cost and reliability of the NinjaFlex sheaths, we select the NinjaFlex sheath as the best choice.

The max tip height achieved by the bending module in cantilever configuration under tip loading. With reduced buckling effect, the actuators bend higher.
Locomotion capabilities of the modular 3D soft robotic snake
In this section, we connect four bending modules in series to create a robotic snake and test undulatory and sidewinding locomotion on it. Also, we test custom step climbing locomotion gaits on an enhanced version of robotic snake with an additional module and wave spring sheath constraint structure for improved ability to resist gravitational forces during climbing. The robotic snake uses low-level valve duty cycle commands that vary along the length of the robot according to desired functions or algorithmic sequences that generate the specific gaits. For undulatory and sidewinding locomotion, we use four modules in the soft robotic snake prototype to reduce overall length. For step climbing locomotion, we use five modules to increase the propulsion and balance of the body during lift off. The experiments are conducted with varying settings to study their effect in locomotion performance. We use a motion capture system to record the trajectory of the soft robotic snake. In parallel, we conduct the simulation studies under the same settings and compare the simulation results with the experimental results in the real world.
Undulatory locomotion
Undulatory locomotion is a well-known locomotion gait of biological snakes, which is also easily conducted by many robotic snakes. With a bidirectional bending motion in the horizontal plane, the snake thrusts its body from side to side, creating a traveling wave, and propels itself with the effect of anisotropic friction provided by snake scales. On our soft robotic snake, the anisotropic friction is provided by the passive wheels mounted on the robot and the motion pattern is identical to the one observed in biological snakes. To perform undulatory locomotion, all the modules undergo bidirectional bending with a certain phase delay between adjacent modules creating a traveling wave of curvature. To generate this motion, we use Eq. (1) to control the robotic snake (
Parameters of Gait Functions
During this locomotion, we do not actuate the top chamber in each segment. Geometrically, if we would like to make sure the segment bending on the same surface, it is needed to “half actuate” the top chamber. While in the real-world experiment, the bending on upward direction will be largely reduced by gravity. As a result, the lateral undulation will stay on the same plane.
We conduct experiments to demonstrate undulatory locomotion on a paper surface with frequency (

Top-left: trajectory of the soft robotic snake CoM when locomotion frequency is 1.50 Hz. Top-middle: trajectory of the soft robotic snake CoM when locomotion frequency is 1.75 Hz. Bottom-left: trajectory of the soft robotic snake CoM when locomotion frequency is 2.00 Hz. Bottom-middle: soft robotic snake performing lateral undulation locomotion from right side to left side in real world. Right: error between simulation result and real-world experiment result with relate to distance traveled. CoM, central of mass.
The robotic snake is theoretically supposed to move in a straight line with constant input and parameter setting. Because of the fabrication inaccuracy, uneven paper surface, and unexpected sliding friction, the robotic snake cannot move in a straight line. The simulation results present a similar tendency and velocity with the real-world experiments, while the trajectories in simulation results are closer to a straight line since there are no fabrication inaccuracies and the surface can be set to be perfectly even.
Deviation in simulation is caused by noise added in contact calculation, and the model for hyperelastic material is simplified for calculation efficiency, which results in error under large deformation, thus the simulation shows some deviation. Higher frequency has little effect on simulation results, while in real-world experiments, higher frequency causes more unexpected sliding during undulatory locomotion, thus the deviation increases. Our previous work presents a method to fulfill trajectory following for soft robotic snakes with an iterative learning controller. 24 While in this work, to test the performance of the soft robotic snake and compare with the simulation, we do not add any controller during the experiments.
Sidewinding locomotion
Sidewinding is a variation of the serpentine motion that makes use of all three DoF in each segment. It physically lifts parts of its body off the ground, giving the body an S-shape with two points of contact with the ground to push the snake in a diagonal direction. Sidewinding locomotion utilizes static friction force instead of sliding on the surface, thus it may have the advantage of higher energy efficiency, but spends energy against gravity to lift the body up. As discussed in Hexagonal Gait section, to realize this locomotion gait in the soft robotic snake, we developed a hexagonal gait to approximate the circular bending motion observed in biological snakes. To conduct the locomotion, we use Eq. (2) to control the soft robotic snake (
We conduct experiments to demonstrate sidewinding locomotion on a paper surface with frequency (
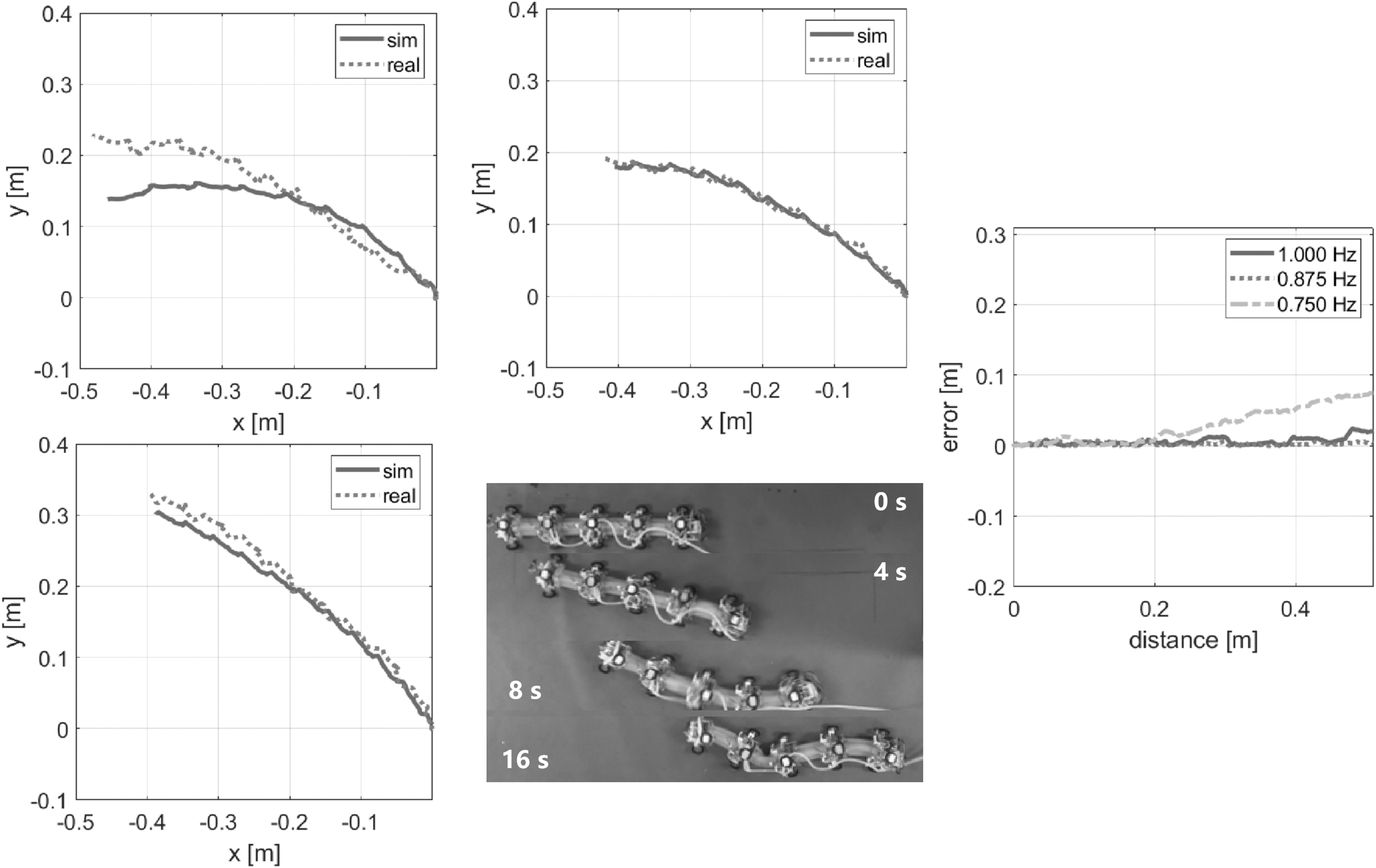
Top-left: trajectory of the soft robotic snake CoM when locomotion frequency is 0.75 Hz. Top-middle: trajectory of the soft robotic snake CoM when locomotion frequency is 0.875 Hz. Bottom-left: trajectory of the soft robotic snake CoM when locomotion frequency is 1.00 Hz. Bottom-middle: soft robotic snake performing sidewinding locomotion on a paper surface. Right: error between simulation result and real-world experiment result related to distance traveled.
Compared with lateral undulation locomotion, sidewinding locomotion has better fit between simulation and experimental result. When performing sidewinding, the segments on robotic snake was applied with extra force from gravity and ground compared with lateral undulatory locomotion, resulting in lower deformation. Meanwhile, the model for hyperelastic material is set to be low-order Mooney–Rivlin inside the simulator as a tradeoff between efficiency and accuracy. As a result, the simulator has a better fitting of lower hyperelastic material deformation, which happened in sidewinding locomotion and the step climbing locomotion.
Since sidewinding locomotion is 3D, contact-based locomotion, there is seldom unexpected sliding compared with undulatory locomotion, also, the effects of surface variations are reduced. As a result, our simulation results are more similar to our real-world experimental results.
Step climbing locomotion
To explore the proposed 3D soft robotic snake's ability to operate on nonplanar environments, we developed a custom locomotion sequence based on the climbing motion of real snakes, which allows our robot to climb up a step (as shown in Supplementary Video S1). At least three modules are needed on the ground for the robot to perform snake-like lateral undulation locomotion and power the robot to move forward. The step climbing motion will result in intermediate states with several modules that cannot touch the ground when climbing up high steps due to the restriction of the module length. Thus, to gain higher thrust and better balance, we added one more module to the robot, and created this gait for a 5-module version of the robotic snake, without loss of generality. As a result, this version offers greater balance for some of the modules to be lifted off the ground.
The snake modules are strong enough for lateral undulation and sidewinding locomotion. However, when lifting themselves off the ground, the external force applied on each segment would easily result in buckling, thus the original soft robotic snake in our previous work fails to climb up. This task exemplifies the need for engineering directional stiffness for soft robots, enabling a level of rigidity in some directions and compliance in others. We achieve this anisotropic stiffness response with a flexible 3D printed sheath as discussed in Wave Spring Sheath section, which significantly improves the performance in step climbing, as determined previously through individual module experiments.
To climb on a step, we need a specific locomotion gait developed as we have done for undulatory and sidewinding locomotion. Instead of trial and error in real-world experiments, we tested and adjusted possible gaits in our real-time simulation. By creating extra constraint with corresponding parameters in the simulator, the snake robot in simulation has similar anti-buckling performance with the soft robotic snake mounted with 3D-printed sheath (as shown in Fig. 8) in real world. With the help of our simulator, a group of gaits are developed to make sure our snake robot can climb on a 7 cm step, which we set as a challenge since it is as high as the snake itself. The step climbing locomotion gait is described in Table 3 and Figure 8.

Step climbing in real-world experiment (top) and in real-time simulation (center). Bottom: actuation states of the proposed soft robotic modules. Each subplot displays the cross-section of the soft module with three pneumatic chambers around a central slot for wiring. Black chambers are pressurized, and white chambers are depressurized.
State of Each Segment to Lift Each Wheel in Step Climbing Locomotion
“/” means switching, for example, “2/1” means switching between state 2 and state 1 under the frequency of
In the process of climbing up a step, the robot first moves forward with its head (first module) raised up (bending upward). After the passive wheels of the first module land steadily on the step, the first module bends downward to get a foothold force and raises the second module while the rest of the body follows lateral undulation to continue pushing forward. After the passive wheels of the second segment land steadily on the step, the head module resumes its regular lateral undulatory serpentine locomotion to move forward, while the second module bends downward to avoid slipping backward. Meanwhile, the third module is lifted up to repeat the same procedure as the second module. After landing on the ground of the upper step steadily, the third module can return to its normal serpentine locomotion and lift the tail part of the robot. With the rest of the modules pulling it forward with lateral undulation, the tail can land on the upper step easily.
This gait essentially generates a simple vertical wave that travels once from head to tail on top of the generic lateral undulation gait which continues pushing the body forward, revealing an interesting way to fuse gaits for 3D motion enabled by our 3D soft robotic modules.
Conclusion
In this article, a 3D soft robotic snake and accompanying 3D-printed wave spring sheath are designed, fabricated, and validated. Experiments were performed to test the performance of a single soft robotic module, as well as the locomotion of the snake robot under undulation and sidewinding gaits. A simulation platform based on NVidia Flex was developed and verified using experiments on the physical snake. Developing a step climbing gait, we were able to command the 3D soft robotic snake to traverse a 7-cm-high step, demonstrating its ability to function in nonplanar environments for the first time, while showing the ability of the NVidia Flex system to seamlessly simulate robotic systems with hyperelastic structures and rigid bodies in real time. The 3D-printed wave spring can help with the buckling behavior, but cannot fully eliminate it, which still restricts the ideal climbing capability; we will extend our current design advantages and keep researching better structures to address this issue.
Our real-time simulation presents a way to generate reliable information quickly, especially for gait development. The soft robotic snake is a complex pneumatic hyperelastic system to simulate. To fulfill real-time simulation requirements, there is a trade-off between computational complexity and accuracy of the results. The ability of the NVidia Flex platform to use GPU-based computation is very beneficial for our simulations. We measured that the simulation speed has increased about 30% recently because of the steadily increasing performance of new GPU hardware. In future work, we will keep exploring the potential of simulations based on Nvidia Flex, and plan to implement different models for hyperelastic materials to increase the application and accuracy of the real-time simulation for any soft robotic system.
In addition, future work will extend our snake-like mobility platforms to operate in the field, addressing challenges in perception, data analysis, power autonomy, and range of motions toward a universal mobility platform useful in real-world applications such as search and rescue in complex environments.
Footnotes
Acknowledgments
This work was performed in WPI Soft Robotics Lab.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This material is based upon work supported by the National Science Foundation (NSF) under grant nos. IIS-1551219, CMMI-1728412, and CMMI-1752195. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the NSF.
Appendix
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.