
Abstract
Robot grippers that lack physical compliance have a difficult time dealing with uncertainty, such as fragile objects that may not have well-defined shapes. Existing soft robotic grippers require a large empty workspace for their actuated fingers to curl around the objects of interest, limiting their performance in clutter. This article presents a three-dimensional structure that exhibits negative stiffness in every bending direction used as fingers in a class of soft robotic grippers. Our approach exploits a compliant mechanism in a conical shape such that a transverse external contact force causes the fingers to bend toward the contact, enabling passive conformation for an adaptive grasp, even in clutter. We show analytically and experimentally that the proposed fingers have a negative bending response and that they conform to objects of various diameters. We demonstrate a soft robotic gripper with three self-conforming fingers performing the following: (1) fingertip grasping, (2) power grasping, and (3) semipassive grasping in clutter. Grasping experiments focus on picking fruits, which exemplify delicate objects with unmodeled shapes with significant variation. The experimental results reveal the ability of the self-conforming structure to smoothly envelope a broad range of objects and demonstrate a 100% grasp success rate in the experiments performed. The proposed passively conforming fingers enable picking of complex and unknown geometries without disturbing nearby objects in clutter and without the need for complex grasping algorithms. The proposed structures can be tailored to deform in desired ways, enabling a robust strategy for the engineering of physical compliance for adaptive soft structures.
Introduction
Problem addressed
Robotic grippers are arguably the most crucial components of robotic manipulators. Adaptive soft grippers have the potential not only to grasp fragile and highly variable objects, but also to interact safely with humans and environments. These benefits are especially convenient when they do not require sophisticated controls.1,2
However, some adaptive soft grippers have problems picking up desired objects in a cluttered environment. For example, suction grippers may be more suitable for grasping objects in a cluttered environment.3,4 Suction cup grippers are nonfingered; they only require one point of contact. While they may fail to pick objects of irregular shapes, or smaller than the cup diameter, where they may not generate sufficient vacuum pressure. 5 Another nonfingered gripper is the jamming-based gripper. Brown et al 6 used granular material and a vacuum to control the gripper. The universal gripper is then able to pick up multiple objects without changing orientation. However, its gripper size may be too large to pick up objects in a cluttered environment.
Other nonfingered grippers are adhesion-based grippers. Researchers are inspired by gecko adhesion early to address the issues of fiction-based grippers, since the shear adhesion force helps the grasp stability. For example, the size of object is larger than the gripper, or the objects are with smooth surfaces. More recently, researchers are more interested in switchable adhesion by utilizing different materials.7–9 Swift et al 7 used polydimethylsiloxane (PDMS) membrane to tune the adhesion forces pneumatically. Similarly, Testa et al 8 used composite, mixed PDMS and magnetorheological fluid to switch adhesion. The authors enhanced the composite's adhesive properties and increase the pull-off force.
Li et al 9 used PDMS as the gripper membrane with granular material and actuated pneumatically. Interestingly, they scaled down the gripper size to apply multifinger grippers, such as the humanoid hand. Therefore, the humanoid hand with adhesion-based grippers may be able to pick up objects in a cluttered environment. While multifingers may raise issues on the large numbers of controllable joints. In addition, adhesive grippers are mostly limited to clean and dry surfaces.
On the contrary, multifingered adaptive soft grippers can pick up objects in a cluttered environment if they can position their compliant fingers around an object of interest. Most existing self-adaptive finger mechanisms work only in a two-dimensional (2D) workspace, such as the Festo MultiChoiceGripper. The MultiChoiceGripper is a three-fingered gripper that relies on fingers with a negative bending response in 2D, that is, the FinRay effect. In general, it can grasp small, round, and rectangular objects. The fingers themselves can be adapted to a wide variety of shapes without additional sensor or control technology. However, for grasping rectangular objects, the configuration needs to be changed from spherical (radial) to parallel grip. 10 If the configuration does not change, the fingers will have to twist and may be in contact with the object only with their edges, which weakens their grasp and also removes their self-conforming behavior, potentially causing grasp failure.
In this study, we present a new soft gripper that moves from 2D compliance to three-dimensional (3D). Our fingers exhibit negative bending in a 3D workspace, which we call the 3D FinRay effect. We do not need to change the finger configuration, the fingers themselves are adaptive to the shape of the object. They may even automatically take a parallel configuration for rectangular objects, by bending the fingers around the surface normal and not necessarily following the radial motion. Since the fingers have a conical shape, they can always provide surface contact with the object instead of edge contact. This means that the proposed gripper is more robust than the existing FinRay grippers. It can adapt to various objects and interact with fragile objects, for example, grasping fruits without bruising them and grasping irregular-shaped apples without disturbing others in a plate of apples.
We achieve these capabilities using a flexible underactuated finger mechanism that bends toward contact forces applied in any transverse direction in 3D. The proposed fingers act as a metamaterial with negative bending stiffness. The mechanism of gripper enables simple electrical actuation with a single servo motor tilting the base of the fingers inward toward the center, naturally conforming to objects in any direction. Therefore, the advantages introduced by 3D compliance are beneficial for robust grasping and adaptability.
Related work
Adaptive soft grippers utilize elasticity for their function. 11 Early soft robots used flexible joints but rigid links. 1 Recently, however, some soft robots have become fully compliant and deformable to better interact with their environment. 12 Soft robotics is often inspired by biological organisms, such as cephalopods or invertebrates.13,14 Soft robotic designs exhibit fully 13 or partially soft bodies constructed of materials with a low elastic modulus14,15 to achieve physical compliance. The first soft gripper was developed by Hirose in 1978 and had joints that could softly and gently conform to the object, 16 with a behavior similar to continuum deformation, but whose linkages were still rigid. The words “softly” and “gently” used in the article conveyed the idea of compliant and adaptive behaviors in this seminal work. Since then, this idea has inspired other researchers to create grippers similar to the Graspar hand. 17
Biological organisms harness physical compliance and the principles of underactuation effectively to perform complex functions. 15 In engineered systems, soft materials can provide adaptability and mechanical compliance, allowing robot bodies to adapt to their environment to distribute contact forces and decrease stress concentrations. 18 Underactuation represents a systematic way to offer engineered mechanical properties by utilizing fewer controllable degrees of freedom and clever self-adaptive mechanisms to actuate a robotic system. Underactuation as used in robot grippers typically comes in the form of rigid linkages, allowing them to adapt to the shape of an object.19,20 The combination of integrated compliance and underactuation leads to the idea of adaptive soft grippers.
Adaptive soft grippers have the ability to grasp unknown objects in unstructured environments, offering adaptability and compliance without sophisticated controls. Such advanced grippers not only grasp fragile and highly variable objects, but also interact safely with humans and environments. However, there are problems with existing adaptive soft grippers. Many soft grippers utilize pressure-based actuation of rubbers21–23 to pick up fragile objects, such as underwater biological sampling. 24 Nevertheless, fluidic systems require the additional infrastructure of a compressor/pump, valves, control box, and tubing system, which limits their use and increases their cost. Inflating pressure cavities in a fluidic system may be unstable and prone to failure over the long run. 25 Furthermore, adaptive soft fingers to date function in a 2D workspace10,26–28 and are incapable of conforming to objects in multiple directions. This may cause instability or even failure if the object does not contact with the fingers in the normal direction.
Many current soft robotic grippers require a large empty space around objects of interest for their relatively thick fingers to curl in and out, limiting operation in clutter.
Soft grippers have been either fully elastic or partially flexible, using compliant mechanisms and underactuation for their adaptive functionality. Fully elastic soft grippers have used elastomeric materials so that they can interact safely with humans and fragile objects. Notable examples of fully elastic grippers include universal gripper, 6 starfish gripper, 29 RBO Hand,21,30 inflatable grippers,31,32 groove-patterned grippers,22,24,26 compliant grippers,33,34 tentacle-type gripper,35–37 wrapping gripper, 38 and stimuli-responsive grippers.39–46 In contrast, partially elastic grippers combine elastomeric materials with rigid linkages, allowing them to have the precision of rigid linkages and some of the tactile compliance and adaptability of soft actuators.19,47 This compliance enables for stable grasps, as the elastic elements deform to deliver a normal force to the object to avoid slipping. 48 Elastic forces also simplify control as the gripper can maintain hold on objects without the use of complex grasping algorithms.
In partially elastic grippers, the joints are often coupled elastically, reducing the number of required actuators. Due to these advantages, this kind of design is widely implemented in modern adaptive grippers. Examples of partially elastic grippers that were developed in the research field include the SDM Hand, 49 iHY Hand, 50 a gripper with passive rotational joint, 51 and a variable grasping gripper. 52 Some well-known commercial examples that effectively utilize underactuated mechanisms include the Kinova Jaco gripper, FESTO MultiChoiceGripper, and Robotiq hand. Furthermore, some soft grippers break this paradigm and use different materials, such as origami grippers,53–55 elastic thread gripper, 56 and adhesive grippers.57–60
Materials and Methods
A 3D self-conforming finger
The fabrication process was divided into three main steps as follows: mold making, silicone rubber elastomer casting, and part-assembly (Supplementary Fig. S1). The 3D finger was constructed out of eight different sizes of composite layers connected by elastic metal rods, and a finger's maximum physical dimensions are 32.47 × 32.47 × 84.45 mm (Supplementary Table S1). Each layer is in the shape of a star with eight points, tapering down in a conical manner from base to tip. The largest (base) layer has a diameter of 30 mm and the smallest (tip) layer has a diameter of 7.6 mm.
The elastomer layers were each fabricated from Dragon Skin 30 silicone rubber (Smooth-On), which were cast in eight differently sized 3D-printed molds. Before the silicone rubber has cured, 0.53-mm-diameter elastic metal rods (piano wires) were inserted into each of the molds, providing a star-shaped skeleton, which increased their rigidity to be utilized as cross beams that transmit transverse forces between opposite sides, which is the basic principle that enables the FinRay effect. 27 After curing for 8 h at room temperature, the layers were demolded, excess elastomer was removed, and the layers were joined using 0.53-mm-diameter elastic metal rods. These rods were inserted into the center of the fingertip layer, through the corner points of each subsequent layer, and into the base, forming the conical shape. The base was fabricated out of a 2-mm-thick acrylic sheet using a laser cutter (Epilog Zing 24 Laser, 40 W).
Two of these pieces were bolted together to form the base to firmly fix the elastic metal rods in between. The detailed process can be seen in Supplementary Figure S1, and the sizes of each layer of the finger are listed in Supplementary Table S1.
Gripper base
Once three fingers are fabricated, we developed a three-fingered gripper base to combine a linkage mechanism, a servo motor, and a housing. The linkage mechanism is to tilt the base of the fingers radially inward. All linkages were made from 2-mm-thick acrylic sheets and cut using the same laser cutter and connected by screws acting as simple pin joints. A servo is used to drive all three fingers. A 3D-printed housing was used to mount the gripper on a robotic arm. An exploded drawing of the gripper base can be found in Supplementary Figure S2. A list of parts used in the gripper is shown in Supplementary Table S2.
Adaptive soft robotic gripper
The last step is to attach three fingers to the gripper base, which was done using the same screws that connected the base of the finger. The gripper is actuated by a single servo motor. A servo drives the rotational axis for all the bases of the fingers at the bottom to achieve open and closed states in unison for the gripper (Fig. 1). The gripper requires 5 V and 1 A at maximum load, determined by the power requirements of the servo actuator that controls the fingers. The servo that we use is a Hitec HS-645MG.
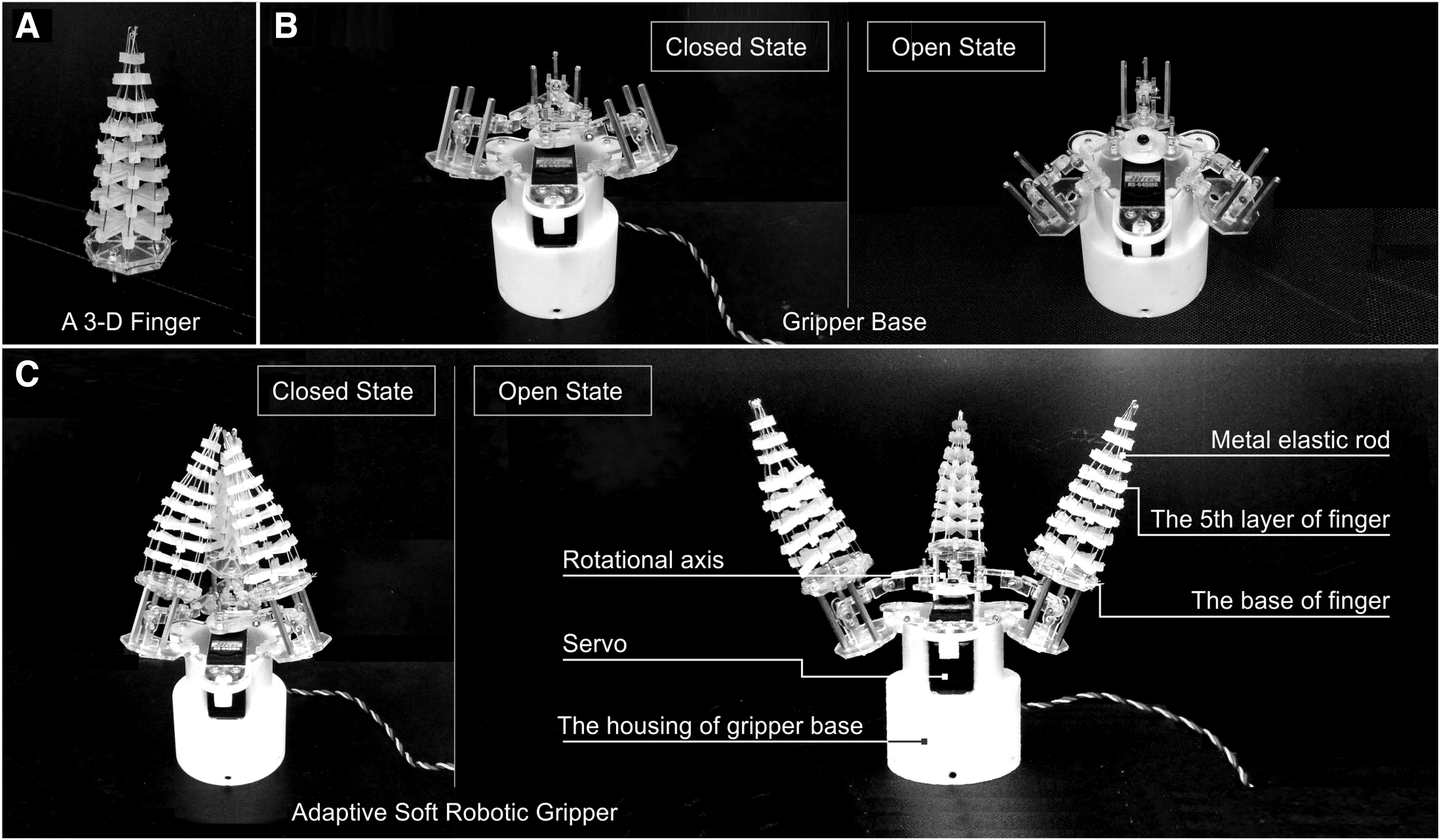
Design of a 3D adaptive soft gripper.
Platform of performance testing
To understand the performance of our gripper, we set up a testing platform to conduct three grasping experiments, which are fingertip grasping, power grasping, and semipassive grasping. The testing platform included the following four main systems: robot operating system ( ROS), Arduino, Jaco arm, and a webcam (Supplementary Fig. S3). We installed the ROS Indigo Igloo version to match the Kinova Jaco arm and an Arduino Uno board. Arduino and ROS communicated via rosserial_arduino package to command the servo motor (HS-645MG) using ROS commands. We hard-coded the grasping position in advance for the first two grasping experiments, fingertip grasping and power grasping, such that the Jaco arm was tested to grasp fruit items for 50 times from the same location.
For the last grasping experiment, semipassive adaptive grasping in clutter, we used a webcam and a custom machine vision code performing color segmentation and circle detection to determine the position of the centroid of the apples for the gripper to grasp. The webcam (Microsoft LifeCam HD-6000 720p HD Webcam) was mounted above the plate of apples, pointing downward. The view of the webcam was shown on the monitor via OpenCV. The experimenter manually selected an apple of interest via a graphical user interface from the monitor to tell the Jaco arm where to attempt the grasp, the vision system detected the centroid of that particular apple, and the grasp is performed. After implementing grasping action by the Jaco arm each time, the image of apples shown on the monitor was automatically updated. The system architecture of the testing platform is shown in Supplementary Figure S3.
Results
Force–displacement testing
To understand how a finger changes when the payload increases, we conducted force

Force versus displacement testing. The finger bends in the opposite direction when it is loaded by three different concentrated loads, 50, 100, and 150 g, at the connected joint on the fifth layer. The results show that the curvature of the finger changes from zero curvature to negative curvature as the load increases and the displacement increases accordingly, which enables the self-conformation behavior we exploit for grasping a broad range of objects in an adaptive gripper.
In addition, we built an analytical kinematic model for a FinRay finger. The finger is represented as a series of four-bar linkages with incorporated torsional springs. All links are considered rigid in a side view 2D plane of the finger, and each layer is connected by revolute joints without friction and torsional springs that represent the elasticity in the walls. More details about the model can be found in the Supplementary Materials (Supplementary Text S1 and Supplementary Fig. S4). Simulation results in Supplementary Figure S5A show a similar bending response to the experimental results, which means the model is capable of accurately predicting the bending of a finger.
As expected, the F-D testing we conducted shows that a finger bends in the opposite direction when it is loaded, which means that the curvature changes from zero to negative curvature, and the fingertip bends toward the load, resulting in a negative bending stiffness behavior. This behavior is why a finger self-adapts and self-conforms around an object.
Conformability testing
To understand what benefit a finger gives by moving from 2D to 3D compliance, we conducted conformability tests. Conformability testing was conducted in 2D and 3D workspaces. In the 2D workspace, we investigated the number of contact points to see how the finger conforms to cylindrical objects. We tested a series of cylindrical shapes, as described in Figure 3. We selected five points on the finger and measured their radial distances from the surface of the object during contact. The cylinders had three different radii (33, 16, and 8 mm, respectively). A finger is pressed onto the cylinder surface until either the cylinder fully touches the five points on the finger, or the center of the cylinder reaches the bottom line of the finger base.

Conformability testing. More contact points achieve better conformation to objects leading to distributed contact forces and better form closure.
Figure 3A shows that five points perfectly contact Cylinder 1 even when there was an 8.3 mm gap between the center of the cylinder and the bottom line of the finger; Cylinder 2 has two points, B and C, in contact; Cylinder 3 with the smallest radius has only point C in contact. Figure 3C shows the radial distances between the surface of each cylinder and the five points on our proposed finger.
Further testing was conducted in the 2D workspace to better characterize how the smaller radius cylindrical objects of 8 and 16 mm affect the finger at each of the elastomer layers. From this testing, the finger exhibits limited deformation due to small radii near the tip of the finger, due to the small size of the 8 mm cylinder, as seen in Figure 4 Column A. As the small radius cylinder is raised into the finger, as shown in Figure 4 Column B, the finger makes better contact with the cylinder, although some parts of the finger are no longer able to deform around the object as it is moved to the base of the finger structure.

Snapshots of finger deformation due to radii of 8 and 16 mm at each layer. Column A shows the effect on curvature of an 8 mm radius at a height of 8.3 mm from the base of the finger at each of the elastic layers, excepting the last layer that was too large to be placed above the 8 mm radius at the 8.3 mm offset. Column B shows the same 8 mm radius at a 4 mm offset, again showing the difficulty reaching the last elastic layer with the center of a circular object. Column C shows the same experiment with a 16 mm radius and no offset, in images C7 and C8 it can be again seen that the base of the finger limits how close to the base of the finger the cylinder can get.
In Figure 4 Column C, a similar set of experiments are shown using a 16 mm cylinder, similarly to the 8 mm cylinder, the finger has trouble conforming to the shape as the shape is brought closer to the base of the finger.
The results show that larger diameter objects will result in a larger surface area in contact with the finger, which provides a stronger grip that resembles a power grasp. However, smaller objects still induce a negative bending response and may be gripped with the fingertips, resembling a pinch grasp. Therefore, we can see that the finger passively adapts to various sizes of objects and can self-adapt to relatively small bending radii. It can smoothly transition between grasp types according to the size of the object, pinch grasp for small objects, and fully envelope power grasp for larger objects.
We also want to know if the finger has the same ability to grasp in 3D workspace. We examined the conformability in the real world by contacting the finger on both sides and at 360°. We first used an 8 mm cylinder bar to touch the finger in a 2D workspace (Fig. 5A). Next, we touched the finger 360° in a 3D workspace. Touch it by increasing 45° each time until 360° (Fig. 5B). The finger in both the workspaces is self-conforming and self-adaptive to the object successfully. This demonstration can be found in Supplementary Movie S1.

Conformability in 2D and 3D workspace.
Comparison with 2D FinRay fingers
Additional experiments were conducted comparing the proposed radial 3D FinRay effect gripper to a radial 2D FinRay gripper with an equivalent mechanism in grasps similar to the bundle of carrots. This grip was selected because it is a key weakness with radial 2D FinRay grippers, and certain commercially available grippers such as the Festo MultiChoiceGripper account for this weakness by rotating the fingers such that the radial gripper switches to a three-finger parallel gripper configuration and back again as needed using a separate mechanism. 10 To test the performance of such 2D FinRay grippers in comparison with the 3D finger-based gripper, two test targets were created, a 40-mm-diameter 120-mm-long cylinder, and a 50 × 40 × 140 mm rectangular prism. These objects were then picked up by both the proposed self-adaptive 3D FinRay finger gripper and a second gripper base modified to utilize 2D FinRay fingers cast out of Smooth-Sil 945 (Smooth-On) instead.
In testing, it was found that the 2D FinRay-based gripper struggled to make good contact with the objects, as only the edges of two of the three fingers made contact with both the rectangular prism and the cylinder when tested, while the third finger perpendicular to the object made contact in a normal direction and conformed around the objects as expected. In comparison, when the 3D FinRay fingers contacted both the rectangular prism and the cylinder, the fingers deformed in multiple directions, automatically transforming in a grip similar to that of a parallel configuration, while still conforming around the shape, as illustrated in Figure 6.

Snapshots of radial grasps of cylinder and rectangular prism using a set of 2D fin-ray fingers compared with the 3D finger grasping the same objects made out of Smooth-Sil 945 (Smooth-On) with a shore hardness of 45 A, these fingers were mounted to a similar gripper base as used for the 3D FinRay experiments, and built as an analogue to the Festo MultiChoiceGripper. In each of the matched angle sets, the 2D FinRay fingers performed consistently worse, while the 3D passively conforming gripper is able to conform around the prism and cylinder, effectively switching from a radial grasp to a parallel grasp.
From this testing, it is evident that a primary benefit of the proposed 3D FinRay mechanism in this radial configuration is that is does not require a secondary mechanism to adjust the finger orientation to pick up objects with this wide encompassing power grasp, saving weight and complexity while maintaining capability.
Shaped weight experiments involved the comparison of the weight capacity of the 3D fingers and the 2D reference fingers when power grasping cylinders and spheres at the approximate center of the fingers. To reduce external variables, both the 2D and 3D fingers were mounted to the same exact gripper, with a servo rotation of 120° to more than close the gripper and adequately grip the target object. To test the two grippers, the base gripper was installed on a Kinova Jaco arm and three of the fingers to be tested. The gripper was then oriented in a downward position and opened to permit insertion of the target item. The gripper was then closed around the target and weights were attached to the eyehook on the target in increments of 20 g until the target and weights dropped out of the gripper. The total weight of the target and added weights is recorded in Table 1.
Experimental Data Collected During Weight and Shape Testing These Experimental Data Values Help to Demonstrate Numerically the Difference Between the Two-Dimensional and Three-Dimensional Fingers on Rotationally Symmetric and Nonsymmetric Objects by Grasping a 45 mm Sphere and Cylinder
These values were generated by repeating each test five times, and averaging the measured values. It should be noted that these values are the weight required to cause the object to fall out of the gripper, the maximum weight the gripper can hold stably is no less than 20 g from the weight recorded in the above table.
2D, two dimensional; 3D, three dimensional.
Each of the four tests was repeated five times and then averaged, with an average weight at failure of 86.46 g for the 2D fingers and the cylinder target, while the 3D fingers averaged 252.3 g with the same target geometry. Spherical targets did not seem to have as large a gap in performance, with the average weight of failure of 135.4 g with the 2D fingers and 251.4 g with the 3D fingers. This suggests that the 3D fingers are less sensitive to nonrotationally symmetric objects.
Performance testing
We conducted four different grasping experiments to quantify the gripper's performance when grasping various fruits and objects (Fig. 7). These three grasping experiments include fingertip grasping, power grasping, and semipassive grasping (Supplementary Movies S2–S4). We first evaluated the experiments on fingertip grasping (Fig. 7A) and power grasping (Fig. 7B through I), calculating the success rate over 50 attempts at picking a collection of fruits and objects.

Performance testing on grasping various fruits and objects. We calculated the success rate over 50 attempts at picking a collection of fruits and other objects using fingertip grasping and power grasping. We also calculated the success rate over six attempts at picking six apples from a pile of apples for semipassive grasping from a cluttered plate.
Grasping experiments are based on pick-and-place manipulation. To maintain consistency, we attach the gripper to a Kinova Jaco arm that follows a fixed standard motion trajectory. The Jaco arm moves directly over the target object, descends and closes the fingers to grasp it, and then rises back up. We had the gripper stay in the air for three seconds to make sure that the grasp was stable. Next, the Jaco arm moves down and opens the fingers to place the object before returning to the home position. Fingertip grasping is used to grasp a single green grape, while power grasping is used to grasp various larger fruits and objects. The items in the power grasping experiment included a raw egg, an apple, a pear, a tomato, a sphere with weights, a cup with weights, a bunch of grapes, and a package of carrots.
The weight range on fingertip and power grasping is from 16 to 312.5 g. The data of weight were obtained experimentally by adding weights in a plastic cup and by repeating a power grasping experiment until the gripper was unable to lift the load. Demonstrations for power grasping and semipassive grasping can be seen in Supplementary Movies S2 and S3, respectively.
The final experiment is passive conformation in clutter, which is to pick up an apple in a plate of apples. The purpose of this experiment is to demonstrate that the fingers can self-conform around a desired object in a cluttered environment. The control states we used to enable this grasping experiment are semiclosed, closed, and open, which was only used to release the apple and return to the semiclosed grasping configuration. The compliant properties of our fingers adapt to different sizes of apples in the pile.
For the semipassive grasping process, the gripper starts in a semiclosed state, which moves the fingers to have a slightly smaller opening than the size of the apples. As the gripper is slowly lowered, the fingers make contact with the apple and passively conform to wrap around its surface, with minimal interaction with neighboring apples. At the bottom, the gripper is fully closed to achieve a tight grasp and the object is raised as before. A representative cycle in the grasping process in clutter is shown in Figure 8 from A through E. We repeat this cycle to pick up each apple on the plate until all apples have been picked up, as shown in Supplementary Movie S4.

Snapshots of semipassive grasping an apple from a closely packed pile of apples. The process of grasping starts with the robotic arm (Kinova Jaco) at home position and the gripper at a semiclosed state where the fingers are opened to an approximately median diameter of the apples. The gripper is positioned above the target apple and moves down along the vertical axis until the fingers almost touch the apple. At this point, the Jaco arm descends slower to allow the fingers to passively conform to the shape of the apple as well as deform appropriately as they come in contact with the surface of the plate. At the bottom, the gripper is fully closed to achieve a tight grasp of the apple, which is lifted up, and placed to a nearby basket.
The results of Supplementary Table S3 show that the gripper achieves a 100% success rate in grasping a collection of fruits and objects 50 times and picking up with semipassive grasping from a plate of apples 6 times. These experiments indicate that the proposed adaptive soft gripper has a stable grasping performance and is capable of grasping various fragile objects successfully and repeatedly. It is noteworthy that the gripper also demonstrated stable grasping in a non-normal direction when grasping a package of carrots (Fig. 8I), where the circular arrangement of fingers self-adjusted and grasped in a different parallel opposing grasp configuration.
The experiments also validated the ability of the fingers to passively conform to the shape of an apple while picking apples on a cluttered plate, where five other apples surrounded the central apple and in contact with it. The central apple was first grasped as the worst-case scenario. In these experiments, the fingertips also showed resilience when coming in contact with the plate, deforming underneath the apple and aiding in grasping (Fig. 8F). Therefore, the semipassive grasping experiment shows that the proposed gripper is able to repeatedly and stably pick up all of the apples in a pile of apples in cluttered and unstructured environments.
Conclusion
This report presented a new type of soft robotic finger that consists of silicone rubber elastomer and elastic metal rods that are capable of grasping objects without internal cables or links, and without using pneumatics. The resulting F-D experiments and models show that the finger is highly adaptable, exhibiting negative bending stiffness, and hence bending toward contact forces. We investigated this phenomenon when the finger comes in contact with cylinders of various sizes, highlighting its adaptable nature. We combined the proposed fingers into a simple three-finger gripper controlled by a single motor and tested its ability to grasp various objects. The gripper shows a stable grasping capability of various fruit items and everyday objects as representative fragile objects with irregular and highly variable shapes, demonstrating a 100% success rate. Moreover, we have demonstrated that our proposed 3D adaptive soft gripper achieves semipassive adaptive grasp of a single apple from amidst a cluttered plate of apples.
Finally, this work demonstrated that the proposed gripper did not require complex control or motion planning algorithms to grasp objects of widely varying sizes and shapes.
The proposed gripper is capable of lifting objects up to a maximum of 312.5 g in power grasp. Using the selected dimensions and parameters of the finger, the weight of the full gripper is 171 g. This represents an effective payload-to-weight ratio of 182.7%. Since the fingers showed a consistent adaptive grasping performance without the need for complex control algorithms, the next plan is to incorporate various sensors in the gripper to achieve proprioception, which will monitor the grasp during semi-passive grasping and help identify objects using data-driven methods. Finally, based on our analytical model, the proposed mechanism can be tailored to generate the desired deformation responses with different loading conditions. We are excited to extend this design concept to other potential applications that may benefit from adaptive passive deformation, such as areas in soft locomotion and human interaction.
The proposed gripper has its limitations. Extending from 2D compliance to 3D, we found that the fingers are not resistant to torsion, similar to the 2D FinRay fingers we have tested. At higher loads, our 3D FinRay fingers may twist, which may cause the object to slip from the fingers. The proposed gripper is best at power grasping objects, not dexterous manipulation. It is not good at fingertip grasping thin and slender objects, such as credit cards or pencils. In fingertip grasping, we only show a potential ability to pinch grasp a single grape, which is the smallest tested object we can reliably grasp.
Footnotes
Acknowledgments
We thank Shou-Shan Chiang for installing UGI on ROS and Erik Skorina for reviewing the article.
Disclaimer
Any opinions, findings, conclusions, or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the NSF.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
A.H.C. acknowledges financial support from the Taiwan Ministry of Education (MOE) Technologies Incubation Scholarship, No. 1040106016. This work was supported, in part, by the National Science Foundation (NSF) Grant: CMMI-1752195.