
Abstract
To create fully-soft robots, fully-soft actuators are needed. Currently, soft rotary actuator topologies described in the literature exhibit low rotational speeds, which limit their applicability. In this work, we describe a novel, fully-soft synchronous rotary electromagnetic actuator and soft magnetic contact switch sensor concept. In this study, the actuator is constructed using gallium indium liquid metal conductors, compliant permanent magnetic composites, carbon black powders, and flexible polymers. The actuator also operates using low voltages (<20 V, ≤10 A), has a bandwidth of 10 Hz, a stall torque of 2.5–3 mN·m, and no-load speed of up to 4000 rpm. These values show that the actuator rotates at over two orders-of-magnitude higher speed with at least one order-of-magnitude higher output power than previously developed soft rotary actuators. This unique soft rotary motor is operated in a manner similar to traditional hard motors, but is also able to stretch and deform to enable new soft robot functions. To demonstrate fully-soft actuator application concepts, the motor is incorporated into a fully-soft air blower, fully-soft underwater propulsion system, fully-soft water pump, and squeeze-based sensor for a fully-soft fan. Hybrid hard and soft applications were also tested, including a geared robotic car, pneumatic actuator, and hydraulic pump. Overall, this work demonstrates how the fully-soft rotary electromagnetic actuator can bridge the gap between the capabilities of traditional hard motors and novel soft actuator concepts.
Introduction
New soft actuation systems are constantly being developed to address problems that traditional rigid actuators are unable to solve. Soft robots have opened the door to improving human–robot interactions,1,2 biomimicry,3–7 shape-changing capabilities,8,9 safe medical devices,10–12 automation, 13 manipulation, 14 and more. These soft systems often rely on pneumatics or hydraulics to bend or expand a flexible body. While these methods of actuation have been successful, soft robots are often much slower than their rigid counterparts. In addition, with some exceptions,15–17 most soft pneumatic or hydraulic systems are still driven by rigid rotary motors and pumps. Thus, creating soft rotary motor and pump concepts, as well as extending the speed of these actuators, is critical for expanding the application space of soft robotic systems.
Recently, there has been significant interest in developing fully-soft rotary actuators. One topology uses thin sheets of dielectric material to rotate a central shaft by energizing sheets in sequence.18,19 Although these novel actuators are flexible and lightweight, they require high voltage sources (>2 kV), rotate at low speeds (<20 rpm), and provide low torque output (∼0.03 mN·m). Soft motors have also been developed using pneumatically driven elastomeric structures. 20 These motors use peristaltic motion to sequentially inflate and deflate air bladders, creating rotational movement. They provide higher torque (∼38 mN·m), but rotate at low speeds (<20 rpm) and require an external pressure supply. Pneumatic torsional actuators have also been developed, which can provide high torques (∼26 mN·m) but are unable to continuously rotate. 21
One approach to increasing the actuation speed of soft systems is to borrow some traditional electromagnetic actuator concepts and apply them in unique ways using soft materials, soft sensors, and soft component design strategies. Eutectic gallium indium (eGaIn) is a room temperature liquid metal with a resistivity of 2.94 × 10−7 Ωm, making it an ideal conductor for soft electromagnetic actuators, 22 as well as soft strain sensors. 23
Some previous work focuses on using eGaIn liquid metal to maintain electrical contact for a brushed rotary motor 24 or using eGaIn, aluminum, and sodium hydroxide to produce hydrogen gas for generating motion. 25 Electrochemically induced actuators have been explored to propel liquid metal marbles in a base electrolyte. 26 Other actuators built using flat liquid metal spirals have proven to be useful for creating small bending motions for swimming, 27 gripping, 28 and folding 29 in the presence of strong external magnetic fields. In our previous work, we use larger liquid metal coils and soft permanent magnet composites to generate linear motions to mimic the pulsing of Xenia coral3,30 and operate fully-soft bistable valves. 31 Higher bandwidths (8–30 Hz) and large strokes (up to 18 mm) were achieved with these soft linear actuators.
While high speed and high stroke linear actuation has been successfully explored with these materials, the lack of high speed soft rotational electromagnetic actuators has limited the versatility of soft robots in literature. In this work, we present a novel soft motor design that uses liquid metal coils, compliant permanent magnets, and silicone polymer to produce continuous rotation. This electromagnetic motor can be operated in a manner similar to traditional synchronous motors, but is able to stretch and deform during operation, making it more compatible with soft robotic systems and improving human–robot interaction. This low-voltage soft motor is capable of producing speeds up to 4000 rpm or more, surpassing the speed of previously developed soft rotary motors by two orders-of-magnitude. This new technology may lead to the development of higher efficiency and higher bandwidth soft actuators necessary for fast muscle response, like those in a hummingbird, or vibrotactile actuators for improved human–robot interaction.
In this work, the motor's rotational speed can be controlled through the development and use of novel compliant magnetic contact switch sensors, which enable sensing and are necessary for synchronized position control of the motor at high speed and under deformation. These soft sensors are repeatable, have fast switching times between 0.5 and 1 ms, exhibit no hysteretic effects, and do not require amplification. After characterization, the soft actuator and sensor system are used to demonstrate a fully-soft air blower, a fully-soft impeller pump, a fully-soft fan controlled using squeeze-based sensing, and a fully-soft underwater propulsion application. Hybrid applications are also illustrated to show how a geared soft rotary motor can be used for driving a robotic car, as well as pumping simple pneumatic and hydraulic systems. The soft rotary motor described in this work dramatically improves the speed of soft actuators while also bridging the gap between the capabilities of traditional hard motors and new soft actuator systems.
Materials and Methods
Soft synchronous rotary motor topology
The soft rotary electromagnetic actuator described in this work uses a brushless motor topology with three phases (
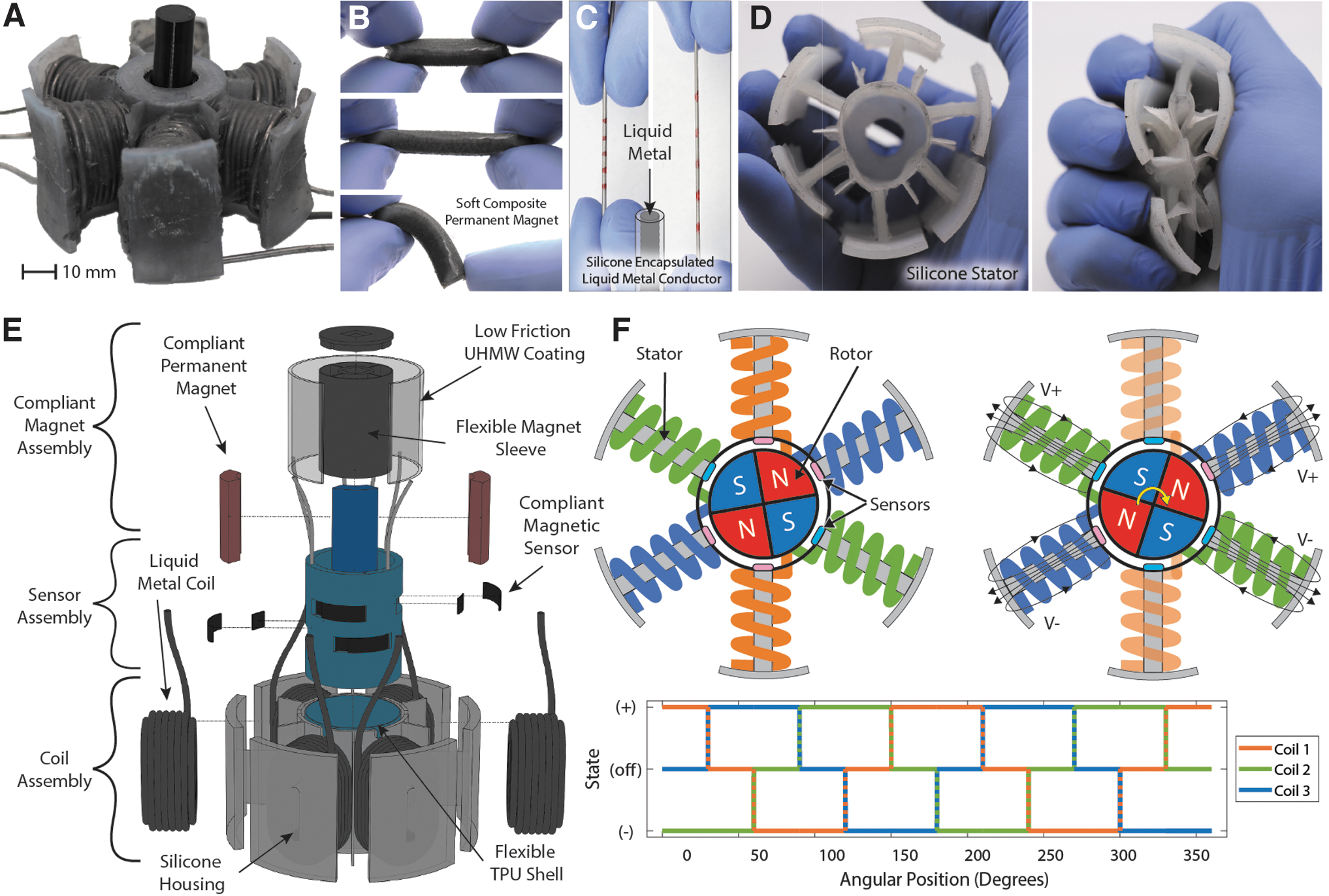
Soft synchronous rotary motor design:
In this work, six silicone-encapsulated coils are created by injecting 5 mL of eGaIn liquid metal (75% wt. gallium and 25% wt. indium combined at 100°C) into 5.5 m of silicone tubing (2.1 mm outer diameter and 1.3 mm inner diameter) through stainless steel luer lock syringe tips. These coils are then wound about a durometer 20A (Smooth-On Dragon Skin) flexible silicone stator and secured using durometer 50-OO (Smooth-On EcoFlex) silicone polymer. Each coil is wound
Four compliant composite permanent magnets were created by mixing 20% wt. durometer 30A silicone and 80% wt. premagnetized neodymium-iron-boron (NdFeB, grade N52, Curie temperature of 300–320°C34,35) powder with sizes ranging from 0.2 mm <
The lifetime of the bushing surface is expected to be limited by the melting temperature of the adhesive (100°C) and UHMW material (130°C). The addition of the UHMW coating reduces the static and kinetic coefficients of friction from
The rotor assembly with an output shaft (stiffness 288 N/m) is then placed into the center of the motor housing lined with a TPU shell. The air gap flux density (
Soft magnetic field sensors
Generally, sensors are not required for generating high-speed rotation in traditional brushless motors. 36 However, the addition of rotational position sensors into the soft motor can improve performance, enabling higher rotational speeds. Without sensors, the motor may stall at high speeds or under deformation due to variable loading on the rotor caused by uneven forces generated by the nonuniform soft magnets and sporadic contact between the soft rotor and soft stator materials.
To mimic the sensing capabilities of hard bipolar hall effect sensors, novel soft permanent magnetic contact switch sensors were developed. While soft magnetoresistive strain sensors 37 and soft conductive carbon-black strain sensors38–40 have been previously developed, these approaches have either low magnetic field sensitivities or exhibit complex hysteretic behaviors. The soft magnetic sensors developed in this work not only exhibit good sensitivity to magnetic fields (opening and closing with a minimum field magnitude of 25 G) but also demonstrate repeatable bipolar on/off switching outputs without requiring amplification or debouncing.
In this study, the sensors are composed of flexible silicone (Smooth-On Dragon Skin 30A), acetylene carbon black, conductive thread (Adafruit 316L Stainless 3-ply, 33 Ω/m), elastic conductive fabric (Sparkfun MedTex 130), and magnetic samarium cobalt powder (SmCo, grade 24 (2:17), particle size d < 0.1 mm), as shown in Figure 2A. Due to the high operating temperature of liquid metal coils, SmCo particles, with higher Curie temperature (720–920°C) and improved corrosion resistance, were chosen. 41

Soft magnetic contact switch sensor design:
To assemble the sensors, the carbon black, silicone, and SmCo particles are mixed together and applied to the conductive fabric and thread. Then, the mixture is cured between two glass plates inside a strong magnetic field and cut to dimensions of 0.4 × 4 × 16 mm (sensor resistance of 30–50 kΩ). This manufacturing process is then repeated without magnetic particles to create soft contacts. Next, the conductive/elastic sensors are fixed to the sensor module with silicone epoxy (Smooth-On Sil-Poxy). Dry graphite lubricant (Max-V-Lube) is placed between them to improve electrical contact and prevent sensor adhesion. After adding an outer TPU sleeve, the switches have a 1 mm total stroke. Finally, the conductive thread is routed through the internal channels of the sensor module and flexible silicone tubing to prevent electrical shorts.
During operation, the sensors are repelled away from or attracted toward the magnetic field generated by the soft rotor. This, in turn, breaks (open state) or makes (closed state) electrical contact, thereby creating the binary mechanical states shown in Figure 2B. The maximum sensing speed is limited by the switch bounce time, which switches at a speed of 0.5–1 ms, and the mechanical bandwidth of the sensor. Because the materials in the switch are soft, the switching is relatively smooth and no electrical or firmware debouncing is needed. In a traditional 3-phase motor, three sensors are required to observe the rotor position and provide signals for control. For this fully-soft rotary motor, additional sensors are used to reduce rotor position uncertainty and improve angular resolution.
In this study, the soft TPU sensor module (2.5 mm thickness, 0.5 mm distance between the sensors and the rotor) accommodates six flexible magnetic sensors, enabling motor position resolution of 20°. Figure 2D illustrates the measured sensor data after digitalization by the microcontroller (see Supplementary Data for raw analog signals). Then, the binary sensor readings are converted to a 6-bit value, and a lookup table is used to determine the motor position and the commands required for clockwise or counter-clockwise rotation.
Results
Soft motor characterization
The performance of the fully-soft motor was characterized by determining its torque, speed, and efficiency. Figure 3A compares the performance of actuating a single coil versus actuating two coils in parallel by changing the rotor position and measuring the output torque with a six-axis force-torque sensor (ATI-9105-EW-Mini40-E). In this study, the peak torque output is higher using single coil actuation. However, in the parallel coil configuration, the equivalent resistance of the two coils is reduced by half. Therefore, the power consumption of the parallel coil configuration is also reduced by half, making it the more efficient and more preferred operating configuration. In the continuous operation mode shown in Figure 3B, all six of the coils are turned on or off in sequence and the torque is measured for each rotor position. Results show that the torque constant of the motor (

Soft motor torque and speed:
Based on the geometry of the motor, the torque constant
42
can be estimated as,
To estimate the relationship between speed and torque, a dynamometer was used. At varying levels of rotational resistance, the output torque was measured for a constant input current ( 43
43
The maximum power output generated by the motor is estimated to be 240 ± 80 mW and occurs at 2000 rpm and 1.25 mN·m. The efficiency of the motor can be calculated from the relationship between input power and output power. With a constant input voltage and current, the maximum power output of the motor can be calculated using Eq. (2) where
An efficiency of 0.24 ± 0.08% is calculated for 100 W power input. The linear relationship between torque and speed has a high level of uncertainty as illustrated by the wide confidence interval in Figure 3C and high variance shown in Supplementary Figure S9 of the Supplementary Data. Because of this uncertainty, a more accurate calculation is obtained through the relationship between input voltage and output voltage, while holding current input constant. The efficiency is then calculated with the more accurate motor torque constant from Figure 3B as,
Here, the motor constant contributes to both the input voltage using back electromotive force (emf), as well as the output voltage using mechanical torque production. The resulting efficiency using the parallel configuration soft motor and soft sensors is 0.35%. In the case where a soft motor is used with conventional hall effect sensors, higher motor speeds are achieved and efficiencies of up to 0.6% are possible. Supplementary Movie S1 shows examples of the soft motor under different compression and expansion scenarios, illustrating that the speed and efficiency do not change under most deformation cases, including up to 15 mm of compression vertically (37.5% strain) and 20 mm of expansion radially (25% strain). Furthermore, Supplementary Figure S16 in the Supplementary Data illustrates the relationship between radial compression and motor speed. As the compressive strain increases beyond 13% strain, the motor is unable to overcome compression and frictional forces.
Next, the back electromotive force (emf) motor constant (

Soft motor electrical, thermal, and dynamic performance:
where  For an ideal brushless DC motor, the motor torque constant is equal to the back emf constant
For an ideal brushless DC motor, the motor torque constant is equal to the back emf constant  and the speed of the motor
and the speed of the motor  For this hybrid system, which couples sinusoidal emf with square wave drives, the relationship between the two motor constants
43
is more accurately given as,
For this hybrid system, which couples sinusoidal emf with square wave drives, the relationship between the two motor constants
43
is more accurately given as,
The constant
The maximum torque output of the electromagnetic actuator is ultimately dictated by the maximum operating temperature above room temperature (
The derivation for this equation can be found in the Supplementary Data. For this soft actuator, the maximum operating temperature is limited by the NdFeB magnet powder, which loses magnetic field strength irreversibly above 60°C. 45 At 120°C, it is estimated that the magnetic field strength of the rotor will reduce by ∼11.4%; therefore, it is essential to maintain a low temperature by limiting the operating time or power input. To test the run time and thermal time constant of the motor, a small platinum resistance temperature detector was inserted between the rotor and stator, and the motor was operated at different input power levels. The results in Figure 4B show a thermal time constant of 1640 ± 88 s and a maximum operating time of 360 s at 100 W in air. If SmCo magnet powders are used and all TPU components were replaced with silicone-molded designs, the maximum operating temperature would be dictated by the maximum operating temperature of the silicone at 232°C. 46
Finally, the bandwidth of the soft rotary actuator was characterized using a stochastic system identification method. A pseudo-random binary signal with a maximum switching frequency of 100 Hz is input into two coils causing the motor to oscillate between two positions. The motion of the rotor is tracked with a high-speed camera, and the input-output transfer function is estimated as shown in Figure 4C. Data above half the maximum input frequency (50 Hz) do not have sufficient input power for accurate estimation. However, below this cutoff, the system behaves roughly linearly with a resonance peak detected at 8 Hz resulting in a fast direction switching bandwidth of 10 Hz for the soft actuator.
New potential for fully-soft robotics
The development of a soft rotary motor opens the door to new fully-soft robotic applications. In this study, a fully-soft air blower prototype is developed by coupling the soft motor with a 3D printed impeller and housing (durometer 95A). As the motor rotates, the impeller draws air into the housing and ejects air out of the nozzle. The soft blower can be used for a variety of applications, including inflating bags, cycling air from one chamber to another, or extinguishing a candle, as shown in Figure 5A. In another application described in the Supplementary Data, the soft rotary motor was also coupled to a soft impeller mechanism to pump water up a small pressure gradient.

Fully-soft blower and underwater propulsion applications: the capabilities of the soft motor are illustrated using fully-soft applications.
In addition, the soft motor can be used for simple fully-soft underwater locomotion. In this study, a flexible propeller and sled with a hydrogel base are attached to the motor, as shown in Figure 5B. Operating the motor underwater does not affect the function of the soft liquid metal coils because of the insulated silicone tubing. In addition, the thermal conductivity is increased and the relative density of the robot is reduced, thereby improving forward propulsion. Conversely, underwater operation increases viscoelastic forces between the rotor and stator, reducing performance. Supplementary Movie S3 shows the function of the soft blower, soft impeller pump, and soft underwater locomotion system. For these fully-soft applications, the motor is operating at a fixed speed of 1000 rpm and the efficiency is estimated to be <0.15%.
The coil compliance can provide sensing capabilities, and this effect can be used to control the speed of the motor. Supplementary Figure S15 and Supplementary Movie S4 demonstrate this application by controlling the speed of a soft propeller fan. As each coil is squeezed, the resistance increases, which can be measured through current sensing. This change in current can then be used to switch between control states. This novel application showcases how the deformability of soft motors can be used to enable novel soft actuator functions.
Hybrid hard and soft applications
Many soft robots are currently a combination of hard and soft components, which includes systems with hard pumps and soft pneumatic end effectors.1,47,48 In this work, we demonstrate how a different configuration with a soft motor, hard gears, and soft end effectors can be achieved. Figure 6A shows how the fully-soft rotary motor can be combined with a belt system, steel rotary bearings, and a hard plastic gearbox. Rigid bearings help maintain axial rotation while minimizing uneven radial loads. This reduces friction between the soft rotor and stator (reduces the coefficient of friction to

Hybrid hard and soft robotic car, hydraulic pump, and pneumatic pump applications:
The soft rotary motor and gearbox can be connected to a variety of mechanisms. First, the soft motor was coupled to an output gear, which is connected to a peristaltic pump. As the motor rotates, the pump is able to displace 240 mL of liquid in 75 s, as shown in Figure 6B. The same peristaltic pump can be used to inflate or deflate pneumatic actuators, as shown in Figure 6C. In this study, a bellows shaped actuator is demonstrated with a neutral length of 48 mm, a vacuum length of 32 mm, and an inflated length of 55 mm.
Finally, the soft rotary motor and hard gearbox system can be coupled to an output wheel, to create a mobile vehicle as illustrated in Figure 6D. This car can drive forward or in reverse at a maximum speed of 28.3 ± 3.2 cm/s. Because the design of the motor is fully compliant, the hybrid car can be stopped by squeezing the soft motor radially by 5 mm (motor efficiency becomes 0%) to increase frictional forces on the rotor, similar to brake pads on a vehicle. However, in this case, the force is applied directly on the soft stator, which interacts with the soft rotor. Demonstrations of the hybrid car, liquid pump, and pneumatic pump applications are shown in Supplementary Movie S3. Overall, the new hybrid concepts broaden the application space for the soft rotary motor by increasing the output torque while maintaining unique soft actuator properties.
Discussion and Conclusions
For this soft rotary motor, design-for-compliance concepts such as oversizing, undersizing, sequential design, and iteration were used to account for the high deformations that can occur during assembly. In addition, because soft components can be stretched and pulled out of reusable molds, more complex geometries can be achieved with soft motor designs. Instead of using nuts and bolts, the joining of soft components can be accomplished by stretching and preloading components, making the design modular and adaptable to new features. While elasticity can provide significant benefits to design, some elements of rotary motors are difficult to translate to soft topologies. For example, radial loads on soft motors cause components to deform and interfere, introducing additional friction.
In traditional hard motors, radial loading and friction effects can be reduced with bearings grounded to the motor casing. In soft motors, however, loads cannot be effectively transferred to prevent deformation. Therefore, preloading or radial load balancing concepts must be used for handling large forces. In addition, while low-friction coatings and dry graphite lubricants have been successfully applied in this work, rotational friction could be further reduced. In the future, the development of soft rotational bushings and bearings made from hydrogels, ferrofluids, or other nonvolatile fluids could further improve the performance of the soft rotary motor and enable fully-soft pumps and cars.
In this work, there is a clear trade-off between actuator compliance and motor efficiency. Many traditional motors are able to operate with efficiencies from 70% to 95%49,50 using small gap distances, high strength magnets, and low conductivity coils. While some other soft electromagnetic coils have been tested with output efficiencies >80%, the hard magnets used in these require field strengths >1 T, 29 which cannot currently be achieved with compliant magnets.
The estimated effects of changing geometry and material properties can be assessed using Eqs. (1) and (4). In this study, an efficiency comparison can be made by substituting compliant materials with rigid materials for the same motor geometry. If compliant permanent magnets were replaced with rigid NdFeB magnets, the magnetic flux density would be ∼36 × higher. In addition, if liquid metal coils were replaced with copper coils, the resistivity would be ∼17.5 × less, enabling an increase in the number of windings. In total, the rigid motor with nearly identical geometry to the soft motor described in this work would have efficiency of up to ∼70%. Although this soft motor does not currently have efficiencies that are competitive with hard motors, it does have operating speeds that are approaching the capabilities of hard motors. It also has many other benefits, including the ability to operate under deformation and the ability to use its compliance for functions like braking.
Other methods of increasing soft motor performance include increasing the thermal conductivity of the liquid metal coils28,44 or using a more electrically conductive soft material. 51 Future optimization on motor design to reduce air gap distances, increase magnetic permeability, maximize coil density, and enhance coil winding configurations can further improve soft motor performance.
For the design of the soft magnetic sensor system, similar factors need to be considered. While these sensors are a flexible alternative to traditional hall-effect sensors, they also have unique temperature, mechanical bandwidth, and electrical characteristics. Since SmCo magnets are used in the sensors, demagnetization is less likely to occur at the maximum operating temperatures of this motor. However, the sensitivity to magnetic field of the rotor is reduced. Nevertheless, the current mechanical switching speed of the magnetic sensor (Supplementary Fig. S7) is fast enough to track rotations up to 20,000 rpm, which is five times faster than the current maximum rotational speed of the motor. Thus, future sensitivity improvements can enable the use of three rather than six sensors, which can potentially reduce computation times and increase soft motor rotational speeds to 7000 rpm or more using only soft sensors.
Overall, this article is the first to successfully demonstrate fully-soft electromagnetic rotational actuation. From a user's standpoint, this soft motor operates much like a traditional brushless DC motor with conventional electronics, making it a desirable alternative to soft pneumatic or dielectric actuation. Compared with previous soft or liquid metal rotational actuators, this motor is over 100 times faster in terms of rotational speed and produces more than 10 times the output power.19,20,24 Several fully-soft applications were highlighted in this work, including a blower, a pump, an underwater propulsion method, and a soft squeeze controller. Using gears to trade speed for torque, hybrid-soft cars and pumps were also successfully demonstrated.
New techniques for operating and conceptualizing soft systems were also explored in this work such as soft rotor braking and design-for-compliance. These innovations create the potential for a new suite of soft robots that utilize electromagnetic rotary actuation. As research in this area continues, additional applications of the soft motor may lead to improved biomimicry, locomotion, human–robot interaction, haptics, and manipulation.
Footnotes
Acknowledgment
The authors thank the Georgia Tech Dynamic Adaptive Robotic Technologies Lab for their assistance with equipment.
Authors' Contributions
Conceptualization: Y.C.M., R.B., N.D.K. Data curation: N.D.K., Y.C.M. Formal analysis: N.D.K., Y.C.M. Funding acquisition: Y.C.M., B.P.R. Investigation: N.D.K., R.B. Methodology: N.D.K., R.B., Y.C.M. Project administration: Y.C.M., B.P.R. Resources: Y.C.M. Software: N.D.K. Supervision: Y.C.M., B.P.R. Validation: Y.C.M., B.P.R. Visualization: N.D.K., Y.C.M. Writing—original draft: N.D.K., Y.C.M. Writing—review and editing: Y.C.M., N.D.K., B.P.R., R.B.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
New Zealand Marsden Fund grant 19-UOA-014. Georgia Tech Institute for Robotics and Intelligent Machines. GTRI HIVE Builders Program.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.