
Abstract
Fluidic soft robots have the advantages of inherent compliance and adaptability, but they are significantly restricted by complex control systems and bulky power devices, including fluidic valves, fluidic pumps, electrical motors, as well as batteries, which make it challenging to operate in narrow space, energy shortage, or electromagnetic sensitive situations. To overcome the shortcomings, we develop portable human-powered master controllers to provide an alternative solution for the master-slave control of the fluidic soft robots. Each controller can supply multiple fluidic pressures to the multiple chambers of the soft robots simultaneously. We use modular fluidic soft actuators to reconfigure soft robots with various functions as control objects. Experimental results show that flexible manipulation and bionic locomotion can be simply realized using the human-powered master controllers. The developed controllers which eliminate energy storage and electronic components can provide a promising candidate of soft robot control in surgical, industrial, and entertainment applications.
Introduction
Soft robots have gained considerable improvements due to the developments in flexible materials and actuation approaches based on biologic inspiration. 1 Interaction complexity with human and environments could be reduced with the advantages of inherent compliance, environmental adaptability, and lower inertia. 2 The soft robots are operated either by automatic control or human–machine collaboration. The former means that the soft robots can generate control signals by themselves instead of external commands to achieve manipulation or locomotion,3–6 which relies on the level of control technology. The human–machine collaboration method makes full use of human participation in the control of the soft robots and has more practical significance in a series of scenarios, such as remote grasping,7,8 minimally invasive surgery,9,10 rehabilitation,11,12 locomotion,13,14 and so on.
The main actuation approaches of the soft robots include fluidic type,15–17 smart-material type,18–21 and cable-driven type.22–24 Fluidic actuation has been widely applied due to its high energy density, low cost, conformability, and the commercial availability of the required components. 25 Fluidic soft actuators are typically composed of elastomer embedded with multiple chambers which can be deformed by pressurized fluid. 26 As a distinguishing feature, the fluidic soft actuators can be integrated within and distributed throughout the body of the robots. 27 However, the fluidic soft robots require bulky fluidic control systems consisting of pumps and valves, as well as fluidic sources powered by batteries or pressurized vessels, which make it challenging to operate in narrow space, energy shortage, or electromagnetic sensitive situations.
Efforts have been paid to operate the fluidic soft robots through human–machine collaboration. A battery-powered wearable glove master is developed for a fluidic soft manipulator to grasp and collect delicate specimens in deep-sea biological sampling. 28 The glove master system needs additional power supply because of the sensors equipped and can only provide control commands for fluidic soft manipulator, so the system relies on a relatively complex fluid-driven device. To evaluate whether grasping by a fluidic soft gripper is successful, a soft fabric-based haptic glove is designed to introduce force feedback to the operator. 29 The haptic glove integrates bending sensors and soft actuators to control the soft gripper and receive feedback through a control box. The system is complex and depends on external energy sources, so it is only suitable for stationary operation scenarios.
A novel approach of teleoperating continuum robots is presented by utilizing a rigid-link manipulator as a more intuitive operational interface. 30 A thumb-controlled joystick interface is used to the master-slave control of a soft manipulator to enable intuitive teleoperation within the confined space of the stomach for low-cost gastroscopy. 31 A bilateral teleoperation framework is developed based on approximating the dynamics of a fluidic soft robot as a rigid link manipulator with elastic joints. 32 The above several works all use rigid links as the master controller and control soft robots through teleoperation. It involves complex master and slave hardware devices and many sensors and needs to establish a mapping relationship between master and slave. This leads to high system complexity and cumbersome control process.
A joystick with multibackbone continuum structure is connected to pneumatic cylinders to improve the manipulation flexibility of a fluidic soft actuator by vacuum suction. 33 The complex structure makes master controller inconvenient to operate. The joystick is connected to the cylinder through a rope, and the vacuum suction generated during the operation is limited, resulting in a small driving force on the soft robot. For better integration, a strategy for additively manufacturing unified soft robots is developed, comprising integrated fluidic circuitry to operate in response to fluidic analogs of traditional electronic signals. 34 However, the system does not contain a driving pressure source, and other fluid components are still required to provide driving pressure, which limits the flexible operation capability of the system.
Regardless of the human–machine collaboration methods used, the fluidic soft robots all require sustainable energy for manipulation or locomotion. A typical approach is to utilize fluidic pumps and electrical motors powered by batteries to generate pressurized fluid.35,36 Chemical reaction can serve as a route to rapidly release large quantities of fluids for the soft robots with high demand of responsiveness.37–39 The prestored pressure tanks integrated with the robot body are also used to realize actuation without silicone tubes connected to external power source. 40 However, the existing energy supplying methods are usually unable to last for long duration.
In this work, we design portable human-powered master controllers to provide an alternative solution for the master-slave control of the fluidic soft robots with simplified configuration. The controller can supply multiple fluidic pressures to the multiple chambers of the fluidic soft robots simultaneously by coupling a joystick and a group of syringes together. The controller is directly powered by human hands in operation so that additional energy storage is eliminated. To validate the controller, we fabricate modular fluidic soft actuators which can be reconfigured into various soft robots through piping connection. A number of experiments are carried out on the fluidic soft robots operated by the proposed controller in different scenarios and tasks. Experimental results show that flexible manipulation and bionic locomotion can be realized without energy storage and electronic components.
Materials and Methods
Fabrication of human-powered master controller
The fabricated prototype of the controller mainly consists of three syringes, a joystick, a compression sleeve, and a base (Supplementary Fig. S1). The main parts of the prototype are made of photosensitive resin and polylactic acid material fabricated by a three-dimensional (3D) printer with the model of A6 (JG MAKER, China Inc.) except for the syringes. We add metal spherical ends to the piston rods of the syringes to reduce the friction between the piston rods and the bottom plate of the joystick. The main parameters of the prototype are shown in Supplementary Table S1. We fabricate an integrated operating handle kit which assembles two controllers together (Supplementary Fig. S1a). Using the handle kit, the operator can control a soft robot with up to eight fluidic soft actuators simultaneously. This study complied with the Declaration of Helsinki, and written informed consent is obtained from all participants before it was conducted.
Fabrication of modular fluidic soft actuator
We fabricate the modular fluidic soft actuator by the following steps. First, we fabricate the molds using the aforementioned 3D printer. Second, we mix part A and part B of Ecoflex 0050 silicone (Smooth On, USA Inc.) according to the mass ratio of 1:1 and pour the mixture into the molds to cast chambers. Third, we wrap the outer surfaces of the chambers using Kevlar fiber to limit radial expansion. Fourth, we install the fiber-reinforced chambers in the molds of the cylindrical body and perform the casting step again to fabricate the body of the soft actuator. Finally, we fabricate the caps by 3D printing and fix them on the two ends of the soft actuator using Sil-Poxy (Smooth On, USA Inc.). In addition, we embed NdFeB magnets with the model of N52 in the caps for fast reconfiguration. The main parameters of the soft actuator are shown in Supplementary Table S2.
Required force and power from operator
The interaction forces between the piston rod ends and the joystick are shown in Supplementary Figure S2, where p1, p2, and p3 are the hydraulic pressures in the syringes, F1, F2, and F3 are the normal forces, and f1, f2, and f3 are the frictional forces between the piston rod ends and the joystick. According to force balance, the following equations can be given as
The relationship between the normal force and the frictional force is given as
where μf is the frictional coefficient.
The load torque corresponding to the tilted angle can be given as

The bending force required on the joystick can be expressed
where Lj is the joystick length.
The bending power required on the joystick can be expressed
where vj is the linear velocity of the joystick at the operating position.
The load torque corresponding to the azimuth angle consists of two parts as
where the first term is caused by the frictional force and given as
and the second term is caused by the normal force and given as

The rotating force required on the joystick can be expressed

where the rj is the radius of the top of the joystick.
The rotating power required on the joystick can be expressed
Experimental platform
We establish an experimental platform to evaluate the controller performance (Supplementary Fig. S3). We utilize pressure sensors (PSE574-10, SMC, Japan Inc.) to measure the fluidic pressure output by the controllers. We use a data acquisition device (Q8-USB, Quanser, Canada Inc.) to collect the pressure data and supply control signals to the electrical actuator in the comparative experiments on piping length. We use a stereo camera ZED2 (Stereolabs, USA Inc.) to measure the coordinates of the markers on the soft actuators. In the measurement, we utilize image threshold segmentation algorithm to obtain the coordinates of the markers in the image captured by ZED2. We derive the bending angle and the azimuth angle of the soft actuator based on the coordinates.
Results and Discussion
Working principle
Human–machine collaboration control
The schematic of a traditional human–machine collaboration control system is shown in Figure 1a. The master-slave control is achieved by operating a joystick at the master end, transmitting the command and receiving the feedbacks through communication, and driving the soft robots at the slave end. 41 The whole process is strongly dependent on electronic components and external energy sources. To reduce the system complexity and eliminate the dependency on energy storage, we propose an alternative solution using the human-powered master controllers which transmit both of the demand signals and actuating power supplied by the operator simultaneously to the fluidic soft robots as shown in Figure 1b. The configuration of the human-powered master controller is shown in Figure 1c. Each controller mainly consists of a joystick, a group of syringes, a compression sleeve, and a base. The number of the syringes is in accordance with the chamber number of the corresponding fluidic soft actuators, which can be three, four, or even more.

Schematic of human–machine collaboration control and human-powered master controller.
This work takes the controller with three syringes as a case study, for the soft actuators to be controlled are with three chambers. The controller has decoupling control capability, which is verified in our previous work. 42 The syringes are connected to the chambers of the fluidic soft actuators through hydraulic pipes. It should be mentioned that each controller can be used to operate more than one actuator in series or parallel connection. Specifically, each controller can govern four soft actuators simultaneously with the bending angle of 90°. Since this controller is designed for master-slave control in human–machine interaction scenarios, the operator and the soft robots are usually in the same area and do not move in a large range. Therefore, the piping between the controller and fluidic soft robots does not negatively affect these applications. The syringes, the chambers, and the piping are filled with water. The spherical piston rod ends of the syringes can slip on the bottom plate of the joystick. Thus, the fluidic soft actuators can be operated to bend with the target angle toward the target direction corresponding to the joystick command.
The compression sleeve and the base are connected through screw thread to maintain contact between the piston rod ends and the bottom plate of the joystick. The joystick supported by the syringes also provides force feedback to the operator. The entire control system is purely mechanical and does not rely on any electronic components and external energy sources. According to theoretical calculation, each controller is designed to be capable of actuating four fluidic soft actuators. An integrated operating handle kit which assembles two controllers together is also designed to achieve good portability and ease operation as shown in Figure 1d. Using the handle kit, the master-slave control of the soft robots becomes entertaining.
Modular fluidic soft actuators
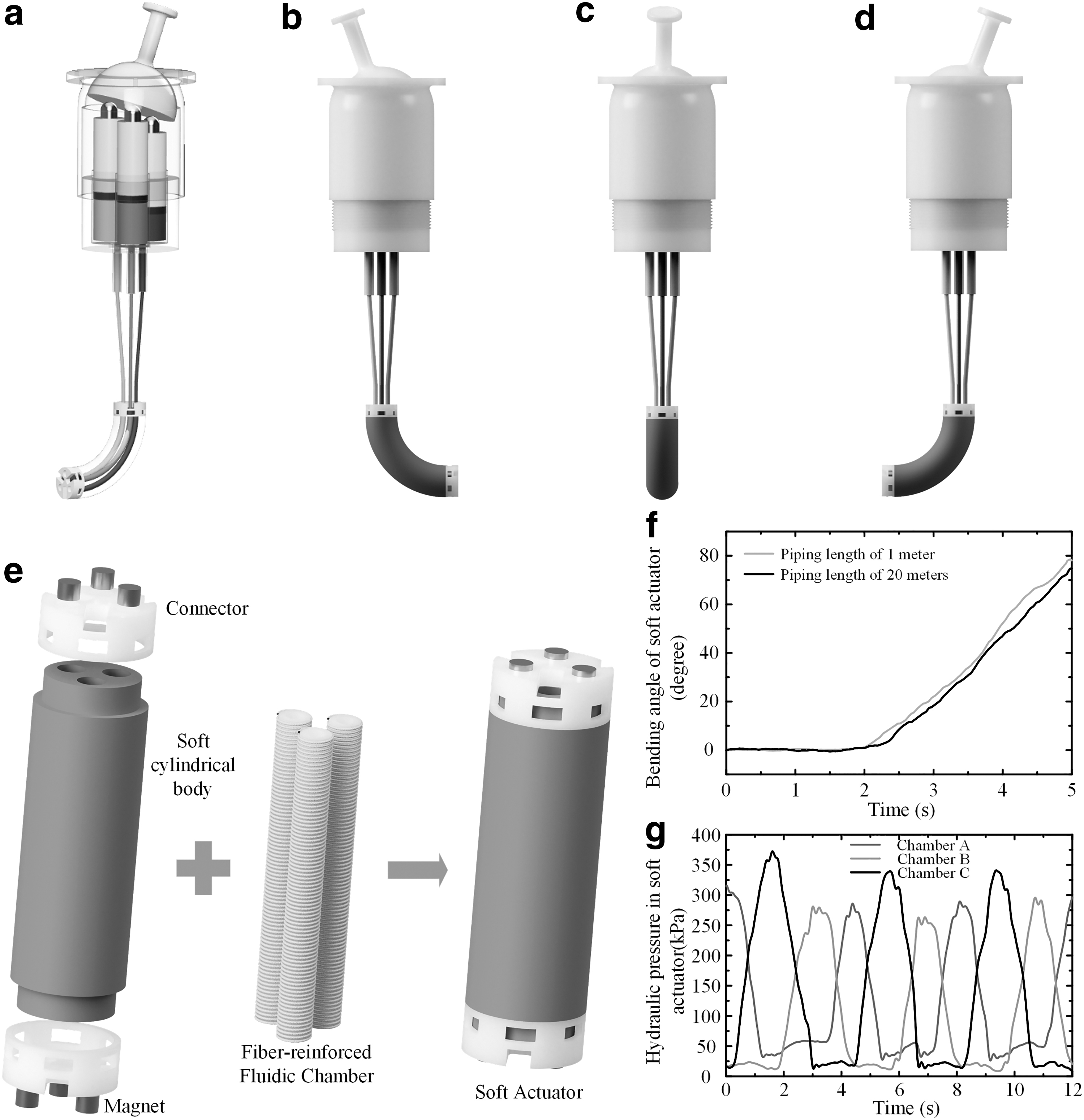
To demonstrate the utilization of the human-powered master controller, we design a modular fluidic soft actuator with three chambers that can be quickly assembled into a variety of soft robots using magnets (Supplementary Fig. S6). 43 As shown in Figure 2e, the soft actuator mainly consists of a soft cylindrical body, two connectors with embedded magnets, and three fiber-reinforced fluidic chambers. By controlling the pressure distribution in the three chambers, the soft actuator can be operated with multiple degrees of freedom.
Modular fluidic soft actuator.
We implement master-slave control of single fluidic soft actuator first. The syringes of the human-powered master controller are connected to the three chambers of the fluidic soft actuator with piping length of 1 m as shown in Figure 2a. It can be seen from Figure 2b to d that the bending direction of the soft actuator will change accordingly when the operator rotates the joystick of the controller. Thus, the control of the bending angle and the bending direction can be decoupled by adjusting the tilt angle and the azimuth angle of the joystick (Supplementary Fig. S4). Moreover, the axial stretch can also be controlled independently by adjusting the length of thread engagement between the compression sleeve and the base. Since the controller integrates command and power transmission together, the soft actuator shows fast dynamic response during testing.
To investigate the effect of the piping length on the master-slave control performance, we design comparative experiments of which the corresponding piping lengths are 1 and 20 m, respectively. The joystick of the controller is pushed by an electrical actuator with preset displacement so as to guarantee equal inputs in the comparative experiments. The influence of the pipe length on the performance of the controller is mainly in two aspects. First, when the length of the pipe is long enough, the compression of the internal liquid under pressure will be considerable and affect the fluid transmission in the form of the response delay in the soft actuator. In contrast, there will be a pressure loss along the pipe, which makes the pressure in the soft actuator lower than the supplied pressure from the controller. The pressure loss may further enlarge the delay in response, especially when the soft actuator has a dead zone. However, the aforementioned influence is generally little when the pipe length varies in a proper range, for the bulk modulus of the transmission liquid such as water is as high as 2.2 × 109 Pa (Standard Status).
To verify the effect in practice, we carry out comparative experiments when the pipe length is set to 1 and 20 m, respectively. As shown in Figure 2f, the soft actuator starts to move at 1.85 s when the pipe length is set to 1 m and starts to move at 1.94 s when the pipe length is set to 20 m. The start-up time differs by 0.09 s. This tiny time difference may be affected by the measurement, the initial position of the controller joystick, etc., so the effect of the pipe length on the response of the soft actuator is negligible within a proper range. The bending angle response of the soft actuator in the case of 20-m piping length is almost the same as the case of 1-m piping length without obvious lag. This distance can make the master-slave control system effective in magnetic resonance imaging (MRI) compatible situation (Supplementary Movie S6).
The required force and power from the operator are experimentally evaluated. In the experiment, the operator pushes the joystick to the maximum tilt angle (25°) and rotates the joystick with the period of about 4 s. Figure 2g shows the periodic variation of the fluidic pressures in the syringes measured by pressure sensors. Since it is manually operated, there is some inevitable asymmetry in the pressure distribution. The maximum output pressure of the controller exceeds 350 kPa and is sufficient for common soft actuators. According to the pressures and the structural parameters, the required force and power acting on the joystick are approximately calculated as 21 N and 0.95 W, which can be easily implemented for an adult operator.
To elaborate the characterization of the proposed controller more clearly, several experiments are carried out. The first experiment is about the relationship between the tilted angle of the joystick and the bending angle of the soft actuator, and Figure 3a shows the hardware settings of the experiment. A motor lead screw is used to replace the operator to drive the joystick to complete the bending process of the soft actuator, to ensuring that the azimuth of the joystick is consistent during the process. According to the results shown in Figure 3b, the tilted angle of the controller joystick has a linear relationship with the bending angle of the soft actuator, so the operator can adjust the tilted angle and the azimuth angle of the joystick to control the tip position of the soft actuator.

Bending control experiment of soft actuator.
In actual application, the controller is used in the master-slave control scene of human–machine interaction without any other sensors. The control of the tip position of the soft actuator mainly relies on the operator to observe the state of the actuator and change the tilted angle of the joystick using human-in-the-loop method. Therefore, the control accuracy of the controller depends on the operator's operational proficiency and observation accuracy. Theoretically, good control accuracy will be achieved as long as the controller is operated proficiently.
Human–machine interaction safety is an extremely important advantage of soft robots; the contact force between soft robots and the external object can provide a quantitative index for the safety of human–robot interaction. To describe the contact process, the second experiment is carried out to record the actuation force on the joystick and the contact force between the soft actuator and the object. Figure 4a shows the hardware settings of the test. Figure 4b shows that the contact force can be detected from 0 N and the maximum force is about 1 N. In addition, experiments are also carried out to compare the effect of whether the soft actuator encounters the object during bending on the actuation force required by the joystick. According to the results shown in Figure 4c, the actuation force required by the joystick is relatively larger when the soft actuator is in contact with the object, which proves that the controller allows the operator to get certain feedback about interaction with external objects.

Contact force experiment of soft actuator.
Manipulation control using human-powered master controller
The modular fluid soft actuators can be rapidly assembled into soft robots for flexible manipulation, such as grasping, twisting, and rolling up using the human-powered master controller.
Grasping and twisting
The flexible gripper is mainly composed of four modular fluidic soft actuators connected to a human-powered master controller in parallel as shown in Figure 5a. Since the soft actuators can bend in three dimensions, the gripper is capable of multiple manipulation modes. When manipulating a small-sized object, the operator first controls the flexible gripper open, then close to wrap the object, and finally open to release it as shown in Figure 5b. Due to the inherent deformation of the soft material, the flexible gripper can adapt to the outer shape of the objects. When manipulating a large-sized hollow object such as a box, the operator first controls the flexible gripper close, then open to attach against the inner wall of the object, and finally close to release it as shown in Figure 5c (Supplementary Movie S3).

Control experiments of flexible gripper.
Due to the nimble ability of the controller, the flexible gripper can not only complete aforementioned grasping tasks but also complete tasks such as twisting knobs and operating valve switches. We control the flexible gripper to twist the temperature adjustment knob of a soldering station as shown in Figure 5d. The twisting manipulation can be easily achieved by rotating the joystick of the controller without electrical and electronic components (Supplementary Movie S4).
Rolling up
Using two controllers integrated in the handle kit simultaneously is more in line with human biological characteristics and can achieve more complex operation than using single controller. To perform rolling up manipulation like an elephant trunk, four fluidic soft actuators are assembled in series and divided into two groups each of which is governed by one controller. When rolling up a slender object, the piping connection of two adjacent soft actuators is deflected by 120° as shown in Figure 6a, and the soft robot can perform helical motion. In the experiment, the operator first operates the left controller to wrap the upper half of the soft robot around the object as shown in Figure 6b and then operates the right controller to wrap the entire soft robot around the object as shown in Figure 6c (Supplementary Movie S1). When rolling up a fat object, the piping connection of two adjacent soft actuators is without deflection as shown in Figure 6d. The operator can make the soft robot roll up the object of which the size is much larger than itself as shown in Figure 6e and adjust the posture of the object through the cooperation of the two controllers as shown in Figure 6f (Supplementary Movie S2).

Control experiments of soft robots inspired by an elephant trunk.
Exploring
The flexible endoscope is assembled by two soft actuators in series with a micro camera and a light emitting diode light on the end. The soft actuators are independently governed by two controllers so as to be more flexible as shown in Figure 7a. We build a five-sided enclosed space in the laboratory which can be used to simulate narrow environment, as shown in Figure 7b. A demo used to demonstrate the controllability of the proposed controller on the flexible endoscope in the narrow environment is carried out in the space. As shown in Figure 7c, two graphic markers are set as target observation points to test the performance of the control system.

Control experiment of flexible endoscope.
In the demo, the flexible endoscope first moves into the operating environment through the narrow hole and then captures the graphic markers by operating the controllers (Supplementary Movie S5). Herein the size and configuration of the flexible endoscope are not customized for actual minimally invasive surgical scenarios. It may be more suitable for the application of industrial endoscope. For application of minimally invasive surgery, structural optimization is required to make the endoscope fit into a narrower body space. Overall, the demo shows the possibility of the proposed controller in the applications such as aeroengine inspection and minimally invasive surgery (Supplementary Fig. S5).
Conclusion
In this work, we introduce the portable human-powered master controllers to teleoperate the fluidic soft robots. Each controller dexterously couples a joystick and a group of syringes together to supply multiple fluidic pressures to the multiple chambers of the fluidic soft robots simultaneously. So the fluidic soft robots can be operated without traditional components such as fluidic valves, fluidic pumps, electrical motors, and batteries.
The controllers are directly powered by human hands in operation, and additional energy storage is also eliminated. In general, the controllers are of simple structure, low cost, free of electronics, and free of energy storage. Therefore, the controllers can be applied in narrow space, energy shortage, or electromagnetic sensitive situations. A typical application is the minimally invasive surgery guided by MRI. From another point of view, it can be regarded as an ability expansion of the human hands by equipping the controllers, as well as the soft robots.
To validate the performance of the controllers, we design and fabricate modular fluidic soft actuators, which can be reconfigured into various soft robots. It shows that the bending angle and the bending direction of the soft actuators can be simply decoupled by operating the tilt angle and the azimuth angle of the joysticks in the controllers. The soft actuators can present quick response to the controllers even when their piping connection is as long as 20 m. This distance makes the operator keep away from the soft robots which may be operated in harsh environments such as with radiation. We experimentally evaluate the required force and power acting on the joysticks, and the results show that it can be easily implemented by an adult operator. Furthermore, we design an integrated operating handle kit which assembles two controllers together to achieve good portability and ease of operation. Through the cooperation of the two controllers, the soft robots can complete a series of tasks, including grasping, twisting, rolling up, crawling, swimming, and exploring, which are complex in the traditional control scheme.
The design of the controller takes the three-chamber fluidic soft actuator discussed in this article as the target control object. Each controller is integrated with three syringes connecting with the three chambers of the soft actuator, respectively, to achieve decoupling control. Due to the volume constraint of pressurized fluid supplied by the syringes, the controller in this work can govern four soft actuators simultaneously with the bending angle of 90°. In fact, the controllability about the number of the soft actuators depends on both the syringe volume and the chamber volume. When the volume of the syringes is relatively large, the control accuracy and the controllability about the number of the soft actuators will be reduced, otherwise the opposite. Thus, it is worth exploring the relationship between the internal volume of the syringes and the volume of the chamber of the controlled soft actuator in the future.
The prototypes of the controllers are made of photosensitive resin and polylactic acid material by additive manufacturing. The frictional surface has a certain roughness, which is prone to cause resistance to the operator and affect the motion smoothness of the soft robots. In practical application, it is required to fabricate the mating parts using light alloy and polish the frictional surface so as to make the operation of the controllers smoother.
In the future, we will further optimize the operation performance of the master-slave control system composed of the human-powered master controllers and the fluidic soft robots. In addition, we will try to apply the system to practical applications such as surgery and industrial endoscope, providing an alternative solution for the fluidic soft robots with bulky control and power devices.
Footnotes
Authors' Contributions
Y.Z. and T.W. conceived the idea and designed the controller. Y.Z. and W.H. fabricated the controller. Y.Z., T.W., and W.H. designed and fabricated the actuator. Y.Z., T.W., and W.H. designed the experiments. Y.Z. and W.H. built the experimental setup and conducted the experimental work. Y.Z. and T.W. analyzed the results. Y.Z. and T.W. designed figures and videos and wrote the article with input from all authors. T.W. and S.Z. supervised the research.
Author Disclosure Statement
Y.Z., T.W., and S.Z. are inventors on a patent application filed by Zhejiang University that covers the design of the human-powered controller.
Funding Information
This work was supported by the National Natural Science Foundation of China under Grant No. 51875504 to T.W.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.