
Abstract
The reconfigurable and modular method, and the adaptive morphology method are two main methodologies to achieve the multimodal robots. Basically, the former method mimics the biological multicellular systems, while the latter is mostly inspired by the multimodal animals. Herein inspired by the rhombic dodecahedron (RDD) origami model, a novel type of soft multicellular robots with multimodal locomotion is presented. Morphologically, the combinable and expandable three-dimensional (3D)-printed soft RDD cells are assembled into several typical patterns: in-line, cross shaped, oblong shaped, and parallelogra shaped. The kinematics based on the sequential monolithic deformations of soft RDDs is analyzed to generate multimodal locomotion: peristaltic crawling, two-anchor crawling, crawling with turning functions, and omnidirectional crawling through the propagating waves in two orthogonal directions. More encouragingly, without reorganizing the pattern or reshaping the morph, the in-line multicellular robots manifest excellent climbing abilities, where the built-in rhombic meshes alternately tighten and loosen the pole-like structures to provide the gripping forces reliably without sacrificing mobility. To wrap up, owing to the monolithic and hierarchical deformability, high reconfigurability, and 3D-printable manufacturability of the RDD, we anticipate that the soft multicellular robot can potentially manifest further contributions to the advanced robotics with embodied intelligence, such as task-oriented self-assembly robots, self-reconfigurable robotic systems, and goal-directed metamorphosis robots.
Introduction
Owing to a variety of attractive features including programmability, simplicity, stowability, portability, deployability, and scalability, origami and kirigami have transcended their original scopes, a time-honored art of manually folding or cutting papers, and increasingly bring about innovative and amazing inspiration sources for engineering creations.1,2 More recently, origami-based solutions intensively demonstrate powerful potentials, such as foldable or deployable structures,3–6 soft robots or actuators,7–9 biomedical or health care devices,10–12 stretchable or flexible electronics,13,14 deformable energy storage devices,15,16 energy absorption structures,17,18 metamaterials,19–21 and other innovative possibilities.22–25
Obviously, the origami-based or origami-inspired engineering practice enhanced by the new materials and modern fabrication technologies is full of great vitality and promising prospects.26,27 Through leveraging the intrinsic novelty of origami models, more and more concepts of traditional disciplines are spectacularly refreshed.
Specifically in the field of soft robotics, various origami-based locomotion modes including crawling, 28 walking, 29 swimming,30,31 jumping, 32 wheeling, 33 flying, 34 and multimodal locomotion, 35 indicate that learning from origami may open a new channel to achieve the anticipated robotic movements instead of the normal means of learning from nature. Moreover, the origami-inspired continuum manipulators and soft grippers confirm this concept, such as webbed gripper, 36 caging gripper, 37 fingered gripper, 38 continuum manipulator,39–41 and soft modular robots.42,43 In conclusion, the elegant foldability and multistability-induced pseudocompliant deformation behavior of origami, such as stretching, bending, twisting, enveloping, and deployment, have become a rich repository of the soft robot development. 44
Also note that the motion degrees of freedom and deformation patterns of origami models are primarily derived from the crease patterns of transforming flat-foldable materials into complicated three-dimensional (3D) forms. Currently, the most commonly used crease patterns for engineering applications are waterbomb, Miura, Yoshimura, Kresling (or the diagonal pattern), and twisted tower. 45 More complex mobility and morphologic changeability, such as multimodal locomotion and task-based forms, may be achieved through the assembly and reconfiguration of combinable and expandable origami modules. In addition, the bionic folding pattern is conductive to broaden the programmable space of both kinetic and static behaviors of artificial origami. 46
In this work, a snapology origami model, 47 that is, the flexible origami polyhedra (commonly called origami flexiballs), is introduced into the soft robotics. Previously, the pilot study 48 has revealed the intrinsic metamaterial properties embodied in this origami model, which are (1) shape-switchable compliance with multiple degrees of freedom, (2) easy-to-assembly reconfigurability, and (3) synchronously hierarchical shape-shifting stated for the monolithic deformations of polyhedron and the second-order deformations of built-in rhombic meshes. Primarily, the macroscopic motion of biological creatures can ultimately be reduced to motility on the level of single cells, and conversely cells may use a relatively small number of modular mechanical properties in various combinations to create diverse morphologies, arrangements, and movements. 49
In this regard, the modular robotics based on the bottom-up approach starting from minimally composable building blocks to establish multifunctional or adaptive robots is a long-standing practice in the robotic community.50,51 Conceivably, the distinct features of soft origami polyhedra promise that it may act as a basic robotic module to create soft multicellular robots, which inherently have the higher morphological complexity than the rigid modular robotic system. Most importantly, the soft combinable morphology and the hierarchical deformability may create new possibility to discover body patterns uniquely suited to a specified task environment.
Methods
Geometry of printable origami polyhedra
The origami flexible ball is a very popular and relaxing model achieved by folding and snapping modular sheet units, and the illustrative tutorial or video tutorial is easy to access online. Formally, there are three types of isometrically symmetrical polyhedra with rhombic cells: rhombic hexahedron (RHD, i.e., cube), rhombic dodecahedron (RDD), and rhombic triacontahedron. In topology, the numbers of their vertices, edges, and faces of a polyhedron satisfy Euler's theorem, which implies that the Euler characteristic is 2. As stated previously, this family of origami polyhedra has many attractive attributes. Among them, the shape-switchable compliance with multiple degrees of freedom can make the origami polyhedra as robotic entities.
Moreover, both the RHD and RDD are parallelohedrons, which can tessellate in a certain space by translational copies of themselves. 48 In this regard, they can serve as second-order underlying cells that are assembled into more complex deformable structures. In addition, with the same size of modular sheet units, the elastic energies of RDD are much higher than those of RHD. Consequently, herein the RDD origami model is selected to build the soft multicellular robots.
Due to the low rigidity and durability, the paper sheets are not directly suitable for the robotic body. Furthermore, folding and assembling modular, unit-based thin sheets with negligible or zero thickness require a complex and tedious sequence of dexterous hand-operated manipulations, whereas current manufacturing technologies cannot imitate this folding process automatically. Therefore, this type of origami structure still encounters one fundamental obstacle of robotization: manufacturability.
In this research, according to the availability of our experimental devices, we attempted to explore the digital fabrication approach of the origami flexiball harnessing the 3D printing technology: fused deposition modeling method. Experimentally, considering the trade-off of the 3D printability, foldability, and high elasticity and good damage tolerance, we redesigned the crease pattern into the printable sheet as shown in Figure 1.
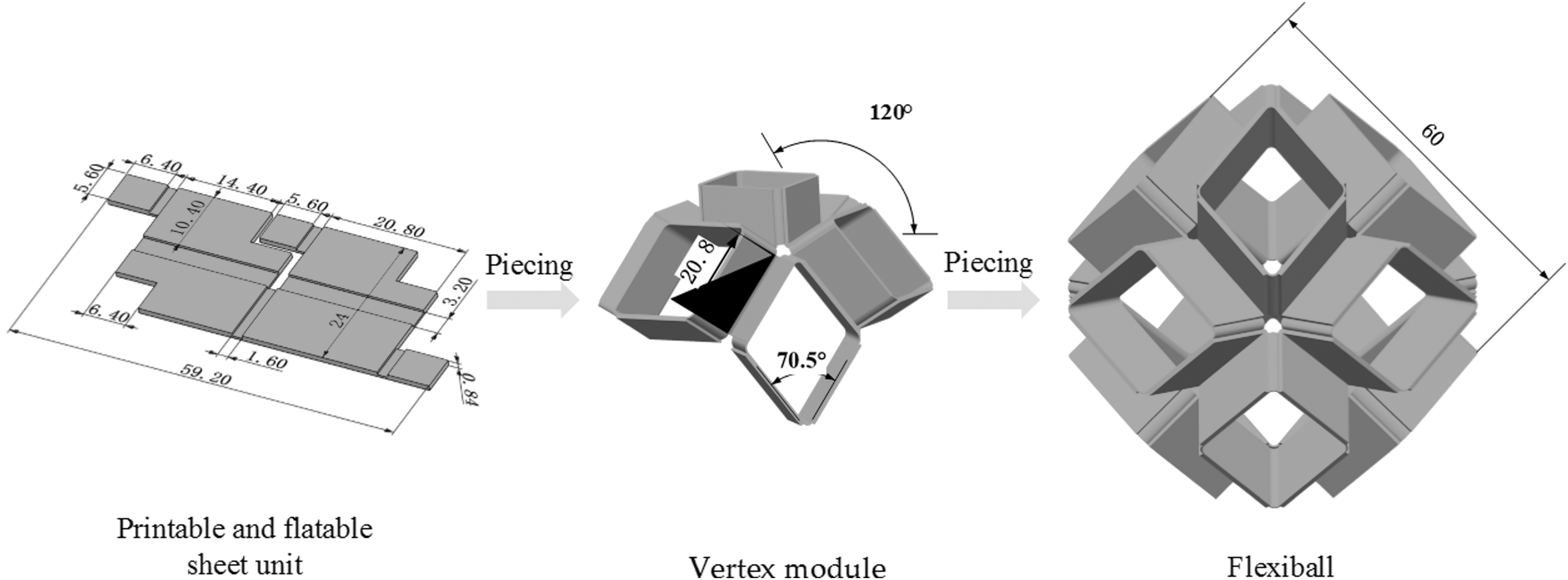
Parameter redesign of the printable origami dodecahedron.
Fabrication of origami flexiball
Owing to the fact that thermoplastic polyurethane (TPU) is a linear segmented block polymer with excellent mechanical properties of large elongation, moderate tensile, and compressive strength, herein it is adopted as the feedstock filament to fabricate the printable origami flexiball. Considering the actual capability of our own 3D printer, we employed flexible 1.75 mm TPU filaments and a 0.3 mm diameter extruder nozzle. The infill density of the grid pattern was set as 50%.
The printing speed was at 50 mm/s, and the layer height was 0.2 mm. As illustrated in Figure 2, we printed the thin sheet units and pieced them together into the finalized origami flexiball using strong glue. Figure 2 demonstrates the multiple shape-shifting patterns of the finalized origami flexiball.

Shape shifting of 3D-printed soft dodecahedron. 3D, three dimensional.
Rope-motor–driven deformation of soft dodecahedron
Besides the manufacturability, another issue to robotize the soft dodecahedron is how to drive the shape shifting. At present, typical driving methods for soft robots include rope-motor driven, pneumatic driven, and smart materials driven. Making use of fluid-driven strategy or other external stimuli actuation strategies not only needs extra auxiliary structures, but also needs refined control methods to avoid the possible deformation interference. For this reason, the rope-motor–driven strategy is adopted, which has high flexibility, high strength to weight ratio, and possible small bending radius to suit the size and strength of the proposed origami structure.
As illustrated in Figure 3, the rope-motor–driven mechanism consists of a SG90 (Servo motor with the net weight of 9 gram; Tower Pro™), a servo holder, and the ropes. The extension and contraction deformations of the soft dodecahedron can be controlled by applying the tension force on two ropes. Basically, the elongation and friction coefficient of the synthetic ropes are supposed to be zero, and the power of the servo motor is transferred into the elastic deformation energy of the soft dodecahedron. The SG90 servo has a stall torque of 0.14 N∙m when given a voltage input of 4.8 volts. According to the actual experiment, the value of the extension-to-contraction deformation is up to 20 mm.

Rope-motor-driven deformation of soft dodecahedron:
Reconfiguration and multimodal locomotion of soft polyhedra robots
Figure 4 shows an exploratory framework to achieve soft polyhedra robots potentially by linking the polyhedral primitives, morphological configurations, and locomotion modes. Basically, the 3D printer serves as the replicator to fulfill the copying of the soft dodecahedron. Furthermore, we snap-fit the outward extruded rhombic faces of two soft dodecahedrons using a 3D-printed clasp manually.

Primitives, configurations, and multimodal locomotions of soft cellular robots.
Depending on this on-demand docking and detaching method, multiple soft cells can be configured into a wide spectrum of morphological patterns. Among them, the most basic pattern is the in-line pattern of three soft cells. As a one-dimensional (1D) expansion, six soft cells form the in-line six-tuple pattern. In the two-dimensional (2D) patterns, three types of morphological patterns are cross shaped, oblong shaped, and parallelogra shaped.
Obviously, only in the 1D and 2D pattern formations, there are many other possible patterns not covered, such as the 3 × 3 square array and T-shaped array. Considering the practicability, particularly the limitations of the rope-motor–driven method, as a proof of concept, herein we explore mainly the locomotion abilities of the five as-built morphological patterns. Next, not only can we observe that the soft multicellular robots can fulfill diverse crawling modes on the ground, but it is also very exciting to find that the 1D patterns of soft multicellular robots manifest the good ability of pole climbing and rope climbing.
Results
Crawling of soft cellular robot in linear configuration
Crawling animals, being mostly made of compliant tissues, are perfect models for mobile soft robots. Crawling occurs when the agent overcomes friction through longitudinal vibration or movement. Crawling locomotion includes several different gaits, such as two-anchor (inchworm-like) crawling, peristaltic (earthworm-like) crawling, and serpentine crawling. 52 Although there are different ways of crawling, most of them are friction based.
With respect to peristaltic crawling, a wave of radial contraction (and axial elongation) travels backward along the body, pushing the animal forward. The body segments of an earthworm lengthen and shorten sequentially. Friction limits the portion of the body that can be moved to allow locomotion. Considering a unitary body, the part of the body that is not elongated [1 – n] should provide an anchor for the portion of the body n, which is elongating: this means that the friction force in the backward direction should be smaller than that in the forward direction. From this relationship, we can estimate the portion of the body, which can be elongated during each cycle.
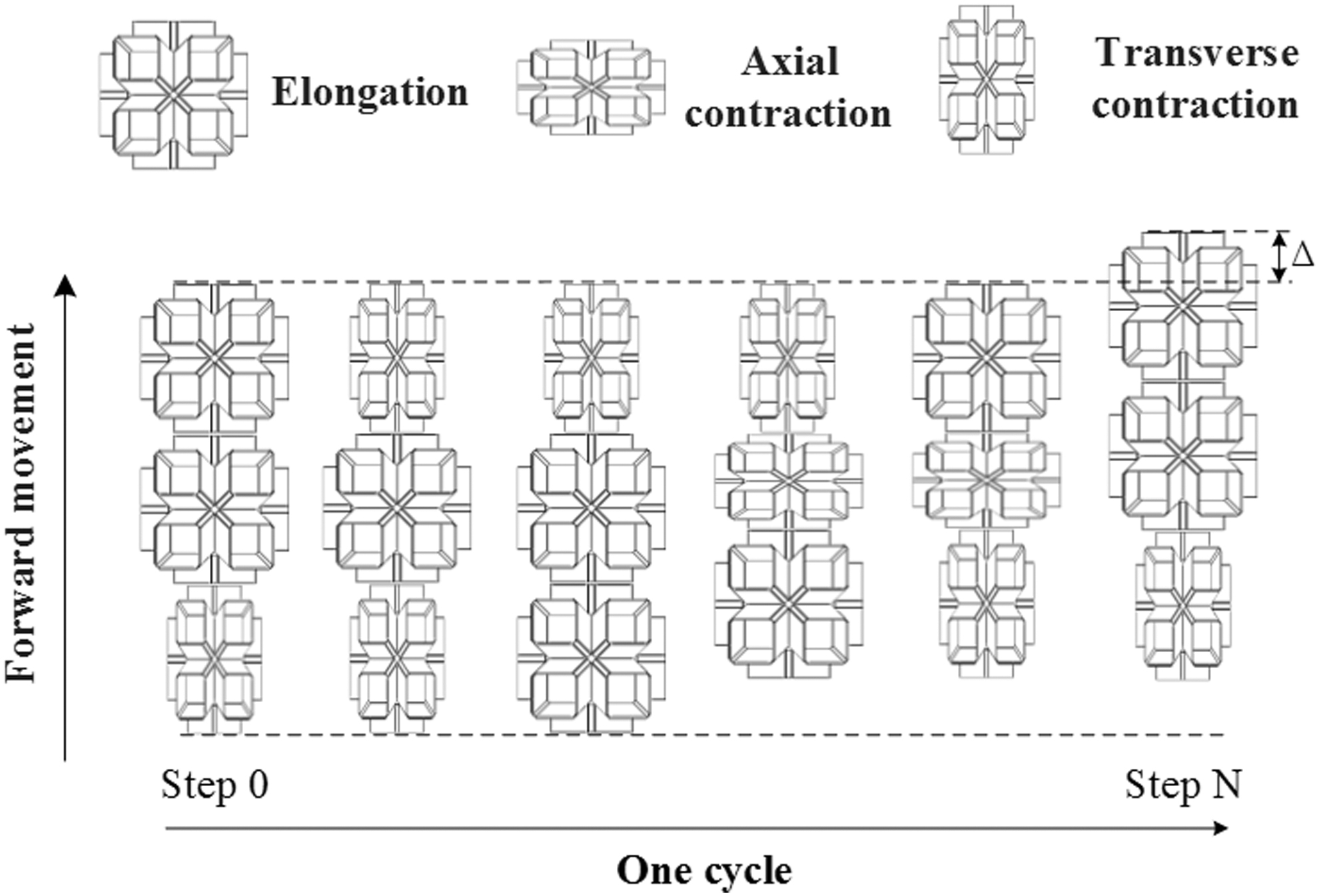
As illustrated in Figure 5, one peristaltic cycle can be divided into five steps:

Peristaltic crawling gait of three modules in linear configuration.
Step 1: initial status, where cells 1 and 3 are elongated, cell 2 is axially contracted;
Step 2: cell 1 is axially contracted, cells 2 and 3 are elongated;
Step 3: cells 1 and 3 are axially contracted, cell 2 is elongated;
Step 4: cells 1 and 2 are elongated, cell 3 is axially contracted; and
Step 5: return to the initial status, and start next cycle.
Steps 1 to 5 are one forward gait, and the overall forward displacement per gait is Δ. Theoretically, with the axial contraction value from 60 to 40 mm, the gait movement distance is 20 mm.
The principle of two-anchor crawling has been extensively studied in caterpillars, where the animal moves forward by lengthening and shortening its body. Owing to that the friction coefficient in the forward direction is lower than that in the backward direction (anisotropic friction), the forward locomotion is generated. In contrast, anisotropic friction is not strictly required for peristaltic crawling.
The out-of-plane bending–based inching locomotion is usually achieved by rising and sprawling the central parts of a body that looks like an “
Two-anchor crawling gait of three modules in linear configuration.
As illustrated in Figure 6, one 2-anchor crawling cycle can be divided into six steps:
Step 1: initial status, where cells 1 and 2 are elongated, cell 3 is contracted transversely; Step 2: cells 1 and 3 are contracted transversely, cell 2 is elongated; Step 3: cell 1 is contracted transversely, cells 2 and 3 is elongated; Step 4: cell 1 is contracted transversely, cell 2 is contracted longitudinally, and cell 3 is elongated; Step 5: cell 1 is elongated, cell 2 is contracted longitudinally, and cell 3 is contracted transversely; and Step 6: return to the initial status, and start next cycle.
Steps 1 to 6 form one forward gait, and the overall forward displacement per gait is Δ. Theoretically, with the axial contraction value from 60 to 40 mm, the gait movement distance is 20 mm.
For a further theoretical analysis, herein an idealized kinematic model of worm-like robots was introduced, which was presented by Kandhari et al.
54
Assuming that there is no slip, the idealized velocity equation of worm-like robots was approximated by
where w is the number of traveling waves, m is the number of moving segments per wave, b is the total number of bridged segments between a pair of moving segments within one wave. n is the total number of segments in the robot.
According to the actual actuation and deformation of our presented models, the waveform parameters [w, m, b, n,

Crawling experiments of three flexiballs-based soft robot:
The prediction error of the peristaltic mode is relatively large, and the basic reason is that not all the elastic energy is converted into the work that pushes body forward, and the sliding frictions cause the energy loss. In contrast, the two-anchor crawling mode produces anisotropic frictions, which caused less energy loss and a relatively fast speed. Moreover, the in-line triple-cell soft robot with the two-anchor crawling mode has a relatively fast velocity than the crawling robot in the Kresling-like tower pattern, herein they are similar in length, and the latter is also equipped with anisotropic friction structure. 55
Furthermore, we estimated the cost of transport (COT) of the in-line triple-cell soft robot. Here, we did not refer to that theoretical estimation formula of COT directly,
54
because it was derived based on the cantilever model of waving segments, while the deforming model of waving segments of the presented crawler is closer to an elastic ball. Therefore, assuming the soft dodecahedron to have linear elasticity like an elastic ball, the strain energy can be approximated by
where
where P is the power to weight ratio,
For the as-built soft robot, the e is 0.91,
With the same principle of the in-line triple-cell soft robot, we also designed the in-line six-tuple cellular soft crawlers. Experiments indicated that the two-anchor crawling speed of the in-line six-tuple cellular soft crawler is 1.28 mm/s, and the peristaltic crawling speed is 3.85 mm/s. Distinctly different from the in-line triple-cell soft crawlers, the peristaltic crawling speed of the in-line six-tuple soft robot is bigger than the speed of the two-anchor crawling mode. From Figure 8, it is noted that the movement linearity of the two-anchor crawling mode is very poor; this reveals that the transverse frictions not only disturb the movement direction but also cause much energy loss.

Crawling experiments of in-line six-tuple soft robot:
Owing to the fact that anisotropic friction is not strictly required for peristaltic crawling, the peristaltic crawling mode of the in-line six-tuple soft crawler not only has good movement linearity, but also obtains a high velocity, which is ∼2.75 times of the peristaltic crawling speed of the in-line triple soft crawler. This is in conformity to the ideal velocity equation, which shows that more moving segments will bring out a high velocity.
In addition, the measured COT of the peristaltic crawling mode of the in-line six-tuple soft crawler is 45, while the measured COT in the two-anchor crawling mode is 120. Table 1 aggregates the wave properties, velocity, COT for the different configurations and crawling mode of the soft multicellular robot. Obviously, the peristaltic crawling mode is more suitable to the linearly longer configuration of flexiball-based soft crawler.
Wave Properties, Velocity, and Cost of Transport for Different Patterns and Crawling Modes of Soft Multicellular Robots
COT, cost of transport.
Omnidirectional crawling of five-tuple soft cellular robot in cross-shaped configuration
As shown in Figure 9, five flexiballs are configured into a crisscross pattern. Note that this pattern is the combination of two in-line configurations that have three flexiballs. Therefore, we can enable the whole-body omnidirectional locomotion by the interpolation synthesis of two mutually perpendicular crawling movements; where the crawling movement of the triple in X direction drives the whole body in the direction of positive X, and the crawling movement of the triple in Y direction drives the whole body in the direction of positive Y. Given a target position

Omnidirectional crawling based on interpolation in cross-shaped configuration.
Through the linear interpolation between the propagating waves in two orthogonal directions, the five-tuple soft cellular robot in the cross-shaped configuration can achieve omnidirectional locomotion on a plane. Experimentally, we have demonstrated this possibility as shown in Figure 10.

Omnidirectional crawling of five-tuple soft cellular robot in cross-shaped configuration (Supplementary Movie S5).
Flexiball-based soft crawling robot in rectangle and parallelogram patterns
As shown in Figure 11, six flexiballs are configured into a rectangle pattern. Note that this pattern is the side-by-side recombination of two linear triple. Naturally, when the crawling speed of the two linear triple keeps the same, the whole body would move forward. Otherwise when the speed of the two linear triple keeps a difference, the differential driving would enable the soft robot turn to a side.

Differential driving of six-tuple soft crawling robot in rectangle configuration.
If the speed on the left side is Vl and the speed on the right side is Vr, then the turning radius Rt and the speed on the body center Vc can be represented by
where Lw is the distance between the bilateral centers. Experimentally, the linear movement mode and turning movement mode of the flexiball-based soft crawling robot in rectangle configuration can been seen in Figure 12.

Combined motion of a six-tuple robot in rectangle pattern:
The pattern of six tuple in parallelogram is almost in common with the pattern of six tuple in rectangle, which is also the side-by-side recombination of two linear triple cellular robots. Clearly, the parallelogram pattern is longer than the rectangle pattern owing to the dislocation. This little dissimilarity does not affect the crawling mode, as shown in Figure 13. Experimentally, the crawling speed of parallelogram pattern is 4.0 mm/s, and the crawling speed of oblong shaped is 5.75 mm/s.

Crawling of six-tuple robot in parallelogram:
Pole-climbing and rope-climbing locomotion
In the high-rise environments such as cable-stayed bridges, transmission towers, wire and monitoring poles, many dangerous and labor-intensive operations such as maintenance, inspections, and cleaning request robotic climbing solutions actively. 56 As for the biological creatures, climbing is a high-level ability, which often requires invoking and coordination of powerful and flexible musculoskeletal systems throughout the bodies. With the periodic body propulsion and alternatively holding or relaxing their limbs, many animals and insects can climb different pole-like structures easily.
Nevertheless, for the robotic community, the development of climbing robots is a challenging task. Currently, several categories of robotic climbing mechanisms have been presented, including absorption climbing, wheeled climbing, clamping climbing, and snake-like climbing. 57 Encouragingly, herein with the insight into the second-order deformations (i.e., the opening and shrinking of the rhombic meshes) along with the monolithic deformation of soft polyhedra, we successfully discover that the soft cellular robot can climb the poles and ropes.
As shown in Figures 14 and 15, without refitting the basic configurations, the in-line triple and six-tuple modular robots can climb the poles and ropes horizontally. In particular, the in-line triple modular robots with two-anchor crawling mode can climb the vertical pole. Where the sequential monolithic deformations enable the soft robot crawling forward along the pipes, ropes, and poles, synchronously the second-order shape shifting of rhombic mesh makes the soft robot alternately tighten, and loosen the pole or rope to grip the pole or rope reliably without sacrificing mobility.

Climbing of in-line triple soft cellular robot:

Climbing of in-line six-tuple soft cellular robot:
For comparison, the measured velocities for different patterns and crawling modes of soft multicellular robots are shown in Table 2. For the in-line triple modular robots in two-anchor crawling mode, its horizontal pole-climbing speed is 4.36 mm/s, its vertical pole-climbing speed is 2.4 mm/s, so to speak, both climbing speeds exceed the crawling speed 2.22 mm/s on the ground. For the six-tuple modular robots in two-anchor crawling mode, its horizontal pole-climbing speed is 3.46 mm/s, its horizontal rope-climbing speed is 3.18 mm/s, obviously both speeds are higher than the crawling speed 1.28 mm/s on the ground.
Velocities of Soft Multicellular Robots with Different Patterns and Crawling Modes
Further in contrast to a rare soft rod-climbing robot inspired by the arboreal snake's winding climbing locomotion, although the presented soft pole-climbing robot does not involve the design of complex actuators, 58 its moving efficiency is not too low. Therefore, to our best knowledge, such ingenious, compact, and lightweight climbing mechanism is revealed for the first time, and hopefully would bring out more enlightenment for the robotic climbing solutions.
Traversability of different configurations
Besides the multimodal locomotion and moving velocities, the different configurations of soft multicellular robots would provide different traversability affordance. Owing to the fast and low-cost manufacturability, and easy-to-reconfiguration, the different traversability affordance of soft multicellular robots can bring out complementarity in the complex working environment.
Figure 16 presents an envisioned scenario of collaborative transporting, where the rectangle-shaped multicellular robot and the cross-shaped five-tuple soft cellular robot can omnidirectionally crawl, but they cannot travel through the narrow pass. In contrast, the in-line multicellular robot can pass the narrow pass freely. Namely, different configurations can play to their strengths and fulfill the transporting task depending on the supervised cooperation.

Collaborative transporting of soft multicellular robots with adaptive morphologies.
Conclusions and Discussion
This research has demonstrated a kind of origami polyhedra-based soft multicellular robots with multimodal locomotion. Although we have not reinvented it through more complex and refined methods such as smart materials (e.g., shape memory material and electroactive polymer), structural programming and incorporating add-on sensors, morphological reconfigurability and mesh-included monolithic morphability based on the primitive origami polyhedron have manifested great potentials to robotic creations.
First, as to the origami robotics, the robotic mechanisms underlying the origami art of RDD are clearly revealed. This research has enriched the origami model library that is suitable and applicable to robotic solutions, no longer limiting to the most commonly used crease patterns: waterbomb, Miura, Yoshimura, Kresling, and twisted tower. Second, this research has explored a worthwhile new method to achieve multimodal robots, which does not seem to exactly fall into one of the two common principles: the reconfigurable and modular method, and the adaptive morphology. 59
Specifically, for the in-line triple configuration, although without reorganizing its pattern or reshaping its morph, it still manifests the best adaptability: crawling on ground, horizontally and vertically climbing the pole-like structure. Generally speaking, it is highly challengeable for a single robot to achieve multimode locomotion because it must simultaneously meet two competing and even conflicting criteria. 60
Undoubtedly, this research case has responded to this challenge in a minimalist and charming way. Last but not least, the presented soft cellular robots have many advantages such as fast and low-cost manufacturability by 3D printing, fast on-site extensibility without modifying the control program substantially.
Undeniably, some limitations of the current work also indicate future research opportunities. One step further, the soft multicellular robots should develop nervous system to retain sensorimotor coordination regardless of the configurations. 61 This requires intercellular communication, deformation sensing, and closed-loop shape controller. In addition, the self-assembly and separation method needs suitable solutions such as magnetic attraction or adaptive snap-fit structures.
After meeting these two points, the soft multicellular robots can manifest autonomous adaptivity by selecting adaptive morphologies for the specified tasks and environments they encounter. Another research outlook is to endow the soft polyhedra cells with more refined and controllable deformations and actuation. The more powerful 3D synthesis of the “shape-morphing and variable-stiffness modules” would endow the soft cellular robots with physical intelligence to adapt their morphologies and behaviors in response to external environments. 35
Footnotes
Authors' Contributions
F.W.H. designed the research, supervised the study, and wrote the article. F.W.H. and C.Z. designed the robot and all experiments, and analyzed experimental data. C.Z. fabricated the samples and performed the experiments. All authors reviewed the article. This work was supported by the National Key Research and Development Program of China (Grant No. 2021YFE0103800).
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work was supported by the National Key Research and Development Program of China (Grant No. 2021YFE0103800).
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.