
Abstract
Multiple sclerosis (MS) is a chronic autoimmune disorder that affects the central nervous system and can result in various symptoms, including muscle weakness, spasticity, and fatigue, ultimately leading to the deterioration of the musculoskeletal system. However, in recent years, exosuits have emerged as a game-changing solution to assist individuals with MS during their daily activities. These lightweight and affordable wearable robotic devices have gained immense popularity. In our study, we assessed the performance of an elbow exosuit on eight individuals with MS using high-density electromyography to measure biceps muscle activity. The results demonstrated that our prototype significantly reduced muscle effort during both dynamic and isometric tasks while increasing the elbow range of motion. In addition, the exosuit effectively delayed the onset of muscle fatigue, enhancing endurance for people with MS and enabling them to perform heavy duty tasks for a longer period.
Introduction
Multiple sclerosis (MS) is a common neurodegenerative chronic disease affecting ∼3 million people globally. 1 Individuals with MS suffer from motor and cognitive impairments, including muscle weakness, fatigue, spasticity, and attention deficit. 2 Upper limb impairments in people with MS affect finger movements, bilateral coordination, and muscle synergies activation, which significantly impact their activities of daily living and quality of life.3–6
Robotic devices show promise in improving motor function for individuals with MS. 7 However, despite the rapid growth in technology for assistance and rehabilitation, there are only few studies focused on treating upper limb-related MS disorders.5,8–11 For example, Pierella et al. 12 developed a body–machine interface for a planar robot manipulandum that reduces biceps/triceps co-contraction in reaching tasks, and Jakob et al. 13 tested the efficacy of commercially available robotic platforms in reducing kinematic impairments. There is evidence suggesting that long-term rehabilitation programs involving upper limb robotics can provide functional benefits for people with MS. 14
Due to the high cost of rehabilitation robots, only a limited number of private customers are able to afford them. Thus, these devices have been primarily used in specialized markets such as hospitals, clinics, and rehabilitation centers. The development of low-cost untethered lightweight exoskeletons and exosuits 15 presents an alternative to traditional rigid robotic platforms, which can increase the accessibility of wearable robots for people affected by MS to assist with activities of daily living.
The goal of this approach is to provide devices that can be worn and operated independently, without the need for expert or medical supervision, both in the home and outdoor environments. These devices can improve working conditions, 16 restore walking, 17 upper-limb movements,18,19 and grasping functions. 20
In the last few years, we demonstrated how exosuits are able to reduce muscular effort 21 without hindering the wearer's kinematics, 22 both in industrial applications 23 and in high dynamic tasks. 24 We refined our architecture to match three main points: lightness, portability, and usability.
In this study, we aimed to assess the effect of using an exosuit on individuals with MS by having eight of them undergo two different tasks while wearing a soft device for elbow assistance. Our goal was to determine if the exosuit improved endurance while preserving natural motion. The first task required dynamic arm movements through elbow flexion, while the second task required participants to hold a weight isometrically for a time of 180 s. We monitored performance using a combination of kinematic and physiological metrics through high-density surface electromyography. The results demonstrate that the exosuit maintained the natural range of motion in the elbow during dynamic tasks and effectively reduced muscle effort. Moreover, the robotic assistance decreased biceps activity and delayed the onset of fatigue, enabling individuals with MS to engage in high-intensity tasks for an extended period of time. These findings align with those of a previous study on people with Bethlem muscular dystrophy and cervical spinal cord injury. 25
This article aims to demonstrate the potential of wearable devices to revolutionize the support provided to individuals with MS in rehabilitation practice and daily activities. This can lead to an improvement in their quality of life and increased independence.
Exosuit Design and Control
The exosuit, which is depicted in Figure 1a, is the latest version of our embedded elbow exosuit, 24 which has undergone a process of hardware refinement as presented in Burchielli et al. 26 It is a stand-alone system that can be placed on the back of the user or can operate as an off-board actuation to assist the elbow flexion movements: it consists of an actuation unit, which is the central component of the active support system, and a custom-made textile harness to transfer the force to the user's joint using an external artificial tendon.
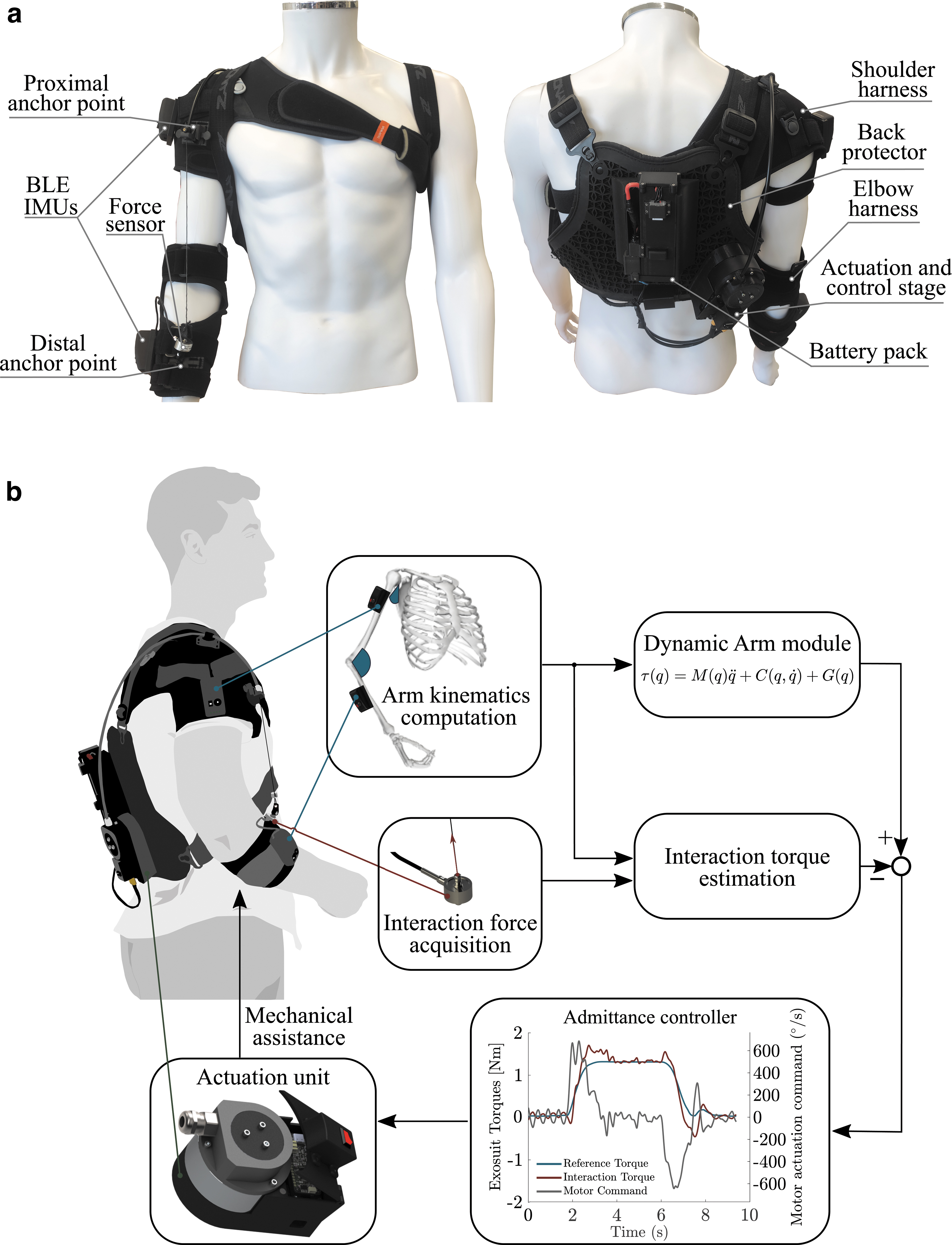
Elbow exosuit design and real-time control framework. The design and control framework of the elbow exosuit can be described as follows.
This last element, made of kevlar fiber (Black Braided, KT5703-06, 2.2 kN max load, Loma Linda, CA, USA), is connected to the subject's forearm through a three-dimensional (3D) printed distal anchor point sewed onto the orthosis. The resistive forces of the tendon, such as friction and backlash, are absorbed by a Bowden cable (Shimano SLR, 5 mm, Sakai, Osaka, Japan) and transferred to the textile harness through a second anchor point located at the shoulder. The actuation stage is designed to be lightweight and portable, weighing only 2 kg and powered by a battery pack, allowing the user to receive active support for around 8 h.
The actuation stage comprises a flat brushless motor (T-Motor, AK60-6, 24 V, 6:1 planetary gearhead reduction, Cube Mars actuator, T-MOTOR, Nanchang, Jiangxi, China) and two microcontrollers. The first microcontroller manages communication with the sensors through Bluetooth Low Energy (BLE), while the second microcontroller is responsible for real-time control. The sensing network, which detects the user's motion and measures the interaction force between the wearer and exosuit, includes two Inertial Measurement Units (IMUs; Bosch, BNO055, Gerlingen, Germany) for detecting 3D arm kinematics and a force sensor (ZNLBM-1, 20 kg max load, Bengbu Zhongnuo Sensor, China) to measure the interaction force applied to the user. The communication protocol between the sensing systems and the control stage has been implemented through BLE, as described in Burchielli et al. 26
The control framework operates in real time (as shown in Fig. 1b) and is built on the “Dynamic Arm Module” approach previously proposed in Lotti et al., 24 which exploits the electromechanical assistance using a 3D biomechanical model of the human arm, customized to the participant's body measurements. The force sensor measures the interaction torque, and an admittance controller uses the difference between this value and the reference torque to determine the motor velocity command.
Experiments
The study involved eight right-handed individuals diagnosed with MS according to the McDonald criteria. 27 These participants were selected from the group of outpatients treated at the AISM (Italian Association of Multiple Sclerosis) Rehabilitation Service of Genoa, Italy. The inclusion criteria were:
Participants' demographic and clinical data are reported in Table 1 (two females, 62.1 ± 8.0 years old, height 1.71 ± 0.09 m, body weight 67.4 ± 8.5 kg, ABILHAND 38.9 ± 9.0, EDSS 4.81 ± 1.16, mean ± standard deviation).
Demographic and Clinical Table
EDSS, Expanded Disability Status Scale.
All the participants involved in the study were naive with the usage of the device. Before starting the experiment in the Powered condition we performed a 3 min familiarization phase followed by 15 min resting phase. The local Ethics Committee approved the study (CER Liguria: 197/2022—DB id 12304). It conformed to the ethical standards Declaration of Helsinki as revised in 2013, and each participant signed a consent form to participate in the study.
Experimental apparatus and protocol
We evaluated the exosuit performance in individuals with MS using a high-density electromyography system (HDsEMG), a 64-channel probe (Muovi+Pro, OT Bioelettronica s.r.l., Torino, Italy), placed on the participant's arm, to measure the biceps activity.
The experiment included two distinct tasks, referred to as Pick and Place (dynamic) and Endurance (isometric), described in subsequent sections, with the objective of evaluating various outcomes.
Pick and place
The participants were required to move a 500 mL bottle of water, weighing 0.5 kg, between two positions placed in front of them that differed in height by ∼30 cm (Fig. 2a). An audio cue from an external source initiated the movement to the appropriate target location, and no constraints on movement or timing were imposed for completing the task. The Pick and Place task was performed in three different random conditions: (1) without the device (No Suit), (2) wearing the device while it was turned off (Unpowered), and (3) with the assistance of the device (Powered). For each condition, 12 back- and -forth movements were performed. A 5 min break was scheduled between the conditions to prevent muscle fatigue.

Functional tasks.
Endurance
This was a test in which participants held a dumbbell with a mass corresponding to approximately ≈5% of their total body weight at a 90° angle of the elbow, avoiding involving the shoulder muscles (Fig. 2b). The maximum time limit for this task was set to 180 s but was terminated at the subject's request when exhaustion was reached. The Endurance task was performed in two different conditions presented randomly: (1) Unpowered and (2) Powered. A 15 min rest period was given to the participants between conditions to allow them to recover from muscle fatigue.
Data analysis
To evaluate the performance of the exosuit in individuals with MS, we examined kinematic and physiological measures. For the Pick and Place task, we utilized IMUs to obtain data at a sampling rate of 100 Hz and determine the elbow flexion and extension phases. To calculate the speed of the joint, a 4th-order Savitzky–Golay filter with a 10 Hz cutoff was used. The onset of movement was identified as the point when the speed surpassed 10% of its maximum value, and the endpoint was identified as the time when the speed fell below the same threshold. 32 The range of motion, mean speed, and peak speed of the elbow joint were analyzed during these phases. In order to assess the smoothness of the kinematics, we utilized the SPectral ARC length (SPARC) technique, which assigns lower values to movements that are less smooth. 33
The HDsEMG signals were recorded at a rate of 2 kHz and underwent further processing to clean the data. A fourth-order Butterworth bandpass filter was applied, with a frequency range of 20–400 Hz, to extract the relevant signal. Any power line interference was removed using a notch filter (50 Hz), and any remaining noisy channels were interpolated using the data from neighboring channels. Each channel was normalized based on the 95th percentile of all signals calculated from multiple recordings of the same participant. 34 The biceps activity was measured in terms of activation volume, which was calculated as the volume of the distribution of root mean square amplitudes for each electrode in a monopolar configuration. The activation volume was calculated using 500 ms epochs and was compared across conditions to assess changes in activity. 34
In addition, the HDsEMG data collected during the Endurance task was used to analyze the onset of fatigue. The muscle fiber conduction velocity (CV) was used as an indicator of fatigue. 35 Longitudinal double-differentials were calculated by subtracting signals from consecutive rows in the single-differential configuration. CV was estimated by dividing the distance between two consecutive detection points along the muscle fibers by the delay between the detected signals. 35 The delay was calculated from the maximum of their cross-correlation. Fatigue was quantified as the slope of a first-order model fitting the CV data during the 1st minute of the Endurance task, with epochs of 500 ms. A steeper negative slope indicated a faster onset of fatigue. 36 Finally, the duration of the Endurance task was also taken into account as a muscle fatigue metric.
Statistical analysis
We assessed the normal distribution of the measurements using a Shapiro–Wilk test with a significance level set at α = 0.05. Repeated measures analysis of variance (rANOVA) was adopted to examine the effects of the biceps activities in the Pick and Place task. We considered the “Assistance” as within-subjects factor: (No Suit, Unpowered, Powered). Statistical significance was considered for p-values lower than 0.05; we reported the notation Fdf1,df2 to indicate the degrees of freedom. Post hoc analysis on significant main effects and interaction was performed using Bonferroni-corrected paired t-tests. Statistical analysis was conducted using Minitab (Minitab, State College, PA, USA). Reported values and measurements are presented as mean ± standard error. We highlighted significant differences in the results with the symbol * in all the figures.
Results
The exosuit increases elbow range of motion
Figure 3 shows the kinematic data extracted from IMUs signal during the Pick and Place task, compared with the kinematics of an unimpaired participant (male, right-handed, height: 1.82 m, weight: 83 kg, 26 years old) that performed the same experiment without the assistance of the exosuit (i.e., Unimpaired). The flexion and extension phases of elbow kinematics, normalized with respect to execution time, are presented in Figure 3a and b, displaying the average data from all participants. While assisted by the device, the elbow angle achieved higher amplitude peaks, resulting in a significantly higher range of motion in the Powered (46.38 ± 3.57°) with respect to the Unpowered (41.07 ± 3.06°) condition (p < 0.001; Fig. 3c). The Unimpaired participant range of motion was 50.01°.

Pick and Place, kinematic results. Data related to the Unpowered condition are depicted in gray, while Powered condition is represented in red, and the ones related to the Unimpaired participant performing the task without exosuit assistance are depicted in light blue.
Figure 3b shows higher velocities during flexion in the Unpowered condition, whereas similar profiles were found during extension between conditions. As a consequence, a significantly higher peak speed was found in the Unpowered condition (59.00 ± 4.11°/s) with respect to Powered (43.65 ± 3.57°/s) condition (p < 0.001; Fig. 3d). The Unimpaired participant peak speed was 91.05°/s.
However, no significant difference resulted in the elbow mean speed (Unpowered: 22.07 ± 1.61°/s, Powered: 22.12 ± 1.90°/s, p = 0.96; Fig. 3f). The Unimpaired participant mean speed was 35.42°/s.
At last, movement smoothness (Fig. 3e) was significantly higher (p < 0.001) in the Unpowered condition (SPARC: −1.44 ± 0.06) with respect to the Powered condition (SPARC: −1.47 ± 0.03). The Unimpaired participant SPARC was −1.41.
The exosuit reduces muscular effort in both dynamic and isometric tasks
A repeated measures ANOVA showed significant differences between the conditions regarding the normalized activity volume (F2,7 = 17.61, p < 0.001). As shown in Figure 4a, a representative participant's HDsEMG activation matrix during the Pick and Place task was similar in No Suit and Unpowered conditions in both the flexion and extension phases, whereas biceps activity was lower in the Powered condition. Post hoc analysis confirmed this finding (Fig. 4b), revealing a significant difference in the normalized biceps activation volume (p < 0.001) between the Powered (0.30 ± 0.13) and the No Suit (0.53 ± 0.14) conditions and a significant difference (p = 0.003) between the Powered and the Unpowered (0.43 ± 0.14) conditions. No significant difference was observed between the No Suit and Unpowered conditions (p = 0.030).

Biceps activation.
The reduction in biceps activity during the Powered condition was observed also in the Endurance task, as shown in Figure 4c by the activation volume of a representative participant holding the dumbbell in isometric flexion. This was confirmed for all participants by the highlighting of a significant difference (p = 0.0325) between the Unpowered (0.36 ± 0.01) and the Powered (0.32 ± 0.01) conditions.
The exosuit increases biceps endurance
HDsEMG allows assessing how the command from motor neurons spreads through muscle fibers, as depicted in Figure 5a: a decrease in conduction velocity was associated with higher levels of fatigue. A significant difference (p = 0.0325) was found between the Unpowered (−0.04 ± 0.02%/s) and Powered (0.15 ± 0.14%/s) conditions, indicating that the exosuit improved endurance (Fig. 5b). Moreover, we noticed that most participants terminated the Endurance task prematurely when they performed it without assistance from the exosuit. However, during the Powered condition, they were able to hold the dumbbell for the entire duration of the task. This finding becomes more evident when examining the time spent on the Endurance task (Fig. 5c), which showed a significant difference (p = 0.0026) between the Unpowered (114.6 ± 14.7 s) and the Powered (165.5 ± 11.6 s) condition.

Biceps fatigue and participants' endurance.
Discussion
Individuals with MS experience a gradual and consistent decline in neuromuscular abilities, resulting in reduced muscle strength and endurance.37,38 This reduces their ability to perform everyday activities related to personal care, leading to a decreased quality of life and making it difficult to lift or carry objects independently. 39 Our goal was to investigate the efficacy of an exosuit designed to assist the biceps muscle in reducing the burden on the musculoskeletal system of people with MS. The prototype we developed is compact, lightweight, and can be easily worn by those with neuromuscular disabilities. 24 Our control method does not require calibration or medical assistance but instead incorporates the user's anthropometric measurements into the control process.
Higher mobility without hindering wearer's motion
The use of the exosuit led to an increased range of motion for all the participants (Fig. 3c), and it enabled them to carry out the Pick and Place task by keeping a consistent mean velocity during elbow movements (Fig. 3f). Looking at the range of motion, we observed considerable improvements due to the assistance provided by the exosuit, resulting in elbow flexion that was much closer to the Unimpaired condition (i.e., 50.1°).
It is important to note that although the exosuit solely assists elbow flexion, the cable release does not impede the gravitational effort, resulting in comparable mean elbow speed in both flexion and extension. A lower peak speed (Fig. 3d) in the Powered condition can be attributed to the novelty of using the exosuit for the participants. Indeed, it is reasonable to assume that with a longer familiarization, the kinematics would improve and match the values recorded during the Unpowered condition. Our results indicated that the movements were smoother without the exosuit's assistance (Fig. 3e), which is consistent with prior research on unimpaired individuals who used the same control strategy. 22
Reduction in muscular effort
By utilizing the HDsEMG system for biceps activity acquisition, we were able to conduct a deep analysis of biceps muscle activation during both dynamic (Pick and Place) and isometric (Endurance) tasks. We assessed biceps activity in terms of activation volume, which considered not only the amplitude of the channels but also the distribution of muscle activity across the electrode matrix.
Our results demonstrated that individuals with MS had lower biceps activity when using the exosuit, regardless of the type of movement required. This pattern has been extensively studied in unimpaired people, where our elbow exosuit has been proven to reduce biceps effort in most elbow flexion tasks.21–24,40 The results of our present study further emphasize the advantages of using an exosuit, particularly for individuals who have experienced partial muscle strength and endurance loss.
Higher endurance and less fatigue
The analysis of CV using the HDsEMG exhibited a noticeable enhancement in muscular endurance while lifting loads, as demonstrated by the delayed onset of fatigue (Fig. 5b). This significant finding was further corroborated by the fact that most of the participants were unable to complete the Endurance task unaided, stopping before the maximum time of 180 s. In contrast, in the Powered condition, the average stop time was nearly 60 s longer.
Limitations and future steps
Our study's findings provide evidence for the potential benefits of exosuits in assisting people affected by MS. However, it is worth noting that our study has limitations as the exosuit was tested in a controlled setting (i.e., laboratory) for a limited number of participants and a restricted amount of time (i.e., 1 h). To better understand the practical applications of the exosuit for people with MS, further research is required to examine its use over extended periods of time in more ecological settings (e.g., at home and work), with a larger population that includes different types of MS and stages of the disease. In addition, the ergonomic properties of the exosuit could be evaluated through ad hoc and validated questionnaires.
At the present stage of its development, the device caters specifically to the needs of individuals with MS, offering only the support they require. As extensively illustrated in our previous work, 24 our device utilizes a gravity compensator controller that is specifically tailored to match the wearer's anthropometry. The purpose of the reference torque is to partially compensate for arm dynamics during elbow flexion. This torque is estimated using two IMUs and a biomechanical model of the arm incorporated within the control loop. It is important to note that if there is no residual motion, the device, with this controller, may not provide assistance.
Furthermore, the device does not require any calibration procedure, and as demonstrated in the current study, it effectively assists individuals with motor impairments as it empowers them to perform daily tasks independently, without depending on someone else's assistance. For example, the device may help with activities that involve lifting and carrying heavy items like shopping bags. However, the aid it provides is not all-encompassing, and it does not enable passive movement. It's worth mentioning that the use and efficiency of this soft robotic device can be further improved with proper training from a physical or occupational therapist.
Moreover, this increase in autonomy can lead to two major long-term benefits. The first is that it may act as a preventive measure against mood disorders such as anxiety, which can stem from worries about disease progression or the fear of losing one's independence, and depression as well. The second is that a boost in independence can enhance self-image and create a stronger inclination to participate in social activities. Together, these outcomes substantially elevate the overall quality of life for those living with MS.
Conclusions
The use of wearable and lightweight devices to assist individuals with neuromuscular diseases has been restricted to a few specific situations. However, in this study, we showed the potential of using an exosuit to support individuals in completing easy tasks but important for completing daily living activities. Our findings indicated that the exosuit effectively reduced musculoskeletal strain, delayed the onset of biceps fatigue, and improved endurance. In summary, our approach has the potential to assist people with MS in their daily activities, and we believe that widespread adoption of such devices can enhance their autonomy in interacting with the surrounding environment.
Footnotes
Author Disclosure Statement
No competing financial interests exist.