
Abstract
In this study, a vacuum-based modular actuator system named reconfigurable origami-based vacuum pneumatic artificial muscles (ROV-PAMs) is presented. The system consists of six types of actuating modules and three types of fluidic supporting modules each embedded with magnet-based connectors so that the modules can be assembled to modify the system behavior. The module can be used in a myriad of ways, including extending their working range, creating complex geometries upon deformation, and cooperating to improve overall performance. A simple analytical model for the actuating modules is derived based on the law of conservation of energy, and the model is verified experimentally which shows that this intuitive model can provide a reasonable prediction of performance. A block sorting robot is built using three different types of actuating modules with multiple fluidic supporting modules, and the robot shows that it is possible to flexibly and easily assemble modules to build a robot capable of completing diverse tasks. The ROV-PAM module and its concept can be applied to realize robotic designs, which can be altered on-the-fly to adjust its functionality to meet the evolving requirements required for truly flexible automation.
Introduction
With the emergence of soft robots in the field of robotics, there have been significant efforts to explore the possibility of soft robots for future applications, such as health care and collaborative robots. Soft robots have several advantages over conventional rigid robots. One of these advantages is that they can safely interact with their environment due to their inherent compliance. Even when equipped with precise sensor systems, traditional rigid robots can still damage objects in their vicinity due to their rigidity and large mass. In contrast, soft robots cause minimal damage as they can conform to their surroundings with their soft bodies. Another advantage is that they can produce a wide range of motion. Rigid robots composed of solid elements have difficulty adapting to changes and thus have limited degrees of freedom. However, soft robots made of soft materials such as polymers and films can have many degrees of freedom that enable complex and continuous motions.
Most soft robots use soft actuators that can harness these advantages to produce the motion that determines the overall behavior of the robot. Some of the early forms of soft robots includes pneumatic artificial muscles (PAMs) that utilize positive pressure to produce a contractile force,1,2 polymer-based pneu-net actuators that can operate even in harsh environments,3–5 film-based pouch motors that can produce either contractile or bending motions based on a simple structure, 6 shape memory alloy actuators,7,8 fiber-based artificial muscles that contract under high temperature, 9 ionic polymer–metal composites that can move in three-dimensional (3D) space,10,11 and magnetic polymer rings that can rearrange into predefined shapes. 12
More recent forms of soft robots include vine robots that can grow to navigate the nearby environment, 13 vacuum-based actuators that can achieve high contraction ratios (>90%), 14 have steady actuation properties, 15 and large force using both positive and negative pressures, 16 extending actuators that can stretch over 300% of their body length,17,18 bidirectional torsional actuators with performance comparable to that of a human foreman, 19 programmable PAMs using additional components such as embedded fibers,20,21 PAMs with a bundled configuration, 22 stackable bellow actuators that can roll and crawl in pipe, 23 electrothermal actuators with the ability to change their shape with the help of a shape-memory polymer layer, 24 spring reinforced actuators with the ability for fast response, 25 polymer-based actuators that integrate haptic sensing ability, 26 and buckling inflatable tubes that can produce complex robotic behaviors. 27 By harnessing these advances in soft actuation technology, some researchers have demonstrated plant-inspired soft robots capable of maximizing the energy harvesting of solar panels, 28 wearable devices,29,30 and modular exoskeletons. 31
Although the aforementioned actuators have remarkable characteristics, their functionalities are quite limited in that a given structure produces a given deformation. This makes it hard to build and modify robot systems on-the-fly and thus to respond rapidly to changing needs. One of the solutions for such an issue would be to apply modular design concepts where simple structures are easily and reversibly combined to build complex systems. 32 Modular soft pneumatic actuators have been assembled using application-specific standardized connectors, 33 push-fittings and screw threads,34,35 using magnets, 36 using mechanical fasteners, 37 and using hook-and-loop fasteners. 38
These modular actuators have either been built from silicone elastomers,33,36–38 or 3D printed.34,35 Some of these modular systems have only one mode of actuation,34,36,38 and others multiple.33,35,37 Still, there is further research required on such modular actuators as (1) the functionality of the modules is generally limited to one or two modes of deformation as they often lack a twisting mode of deformation, (2) their performance in certain or all modes of deformation is often insufficient for many applications, and (3) there is no analytical model that may be helpful when modifying their dimensions or rescaling them.
In this study, we introduce modular reconfigurable origami-based vacuum pneumatic artificial muscles (ROV-PAM) with a simple geometry that can produce contractile, bending, and twisting motions. The ROV-PAM modules use assisting plates to define their actuation mode and magnet-based connectors for assembling the modules. Additional modules are also used as fluidic elements. With these modules, the characteristics of the ROV-PAM-based system can be easily adjusted by using the proposed modular design. The modules can be assembled not only in series but also in parallel, which allows them to alter both their functionality and performance.
First, designs of each type of module are presented, followed by an analytical model for the different modes of deformation derived using the law of conservation of energy. Then, a series of experimental results are presented to validate the model indicating that the model is simple yet helpful to design an ROV-PAM-based system. Afterward, several demonstrations are presented to show the potential of ROV-PAM modules including working range adjustment with modules connected in series, cooperative actuation with modules connected in parallel, and basic block sorting tasks. This illustrates the versatility of the ROV-PAM module and shows that the ROV-PAM can expand the range of applications and the versatility of soft robots.
Methods
Actuator concept
The basic structure of the ROV-PAM consists of 3D-printed parts and a thin film, which are assembled using common hot melt. The 3D-printed parts are used as reinforcement to guide the deformation of the film, which is used to create the sealed flexible chamber of the module. In this study, polylactic acid-based parts and polyvinyl chloride (PVC) films are used, although any material can be used if they meet the aforementioned requirements. Six types of actuating modules (contractile, channeling module, two bending, and two twisting modules) and three types of supporting modules (head, spine, and tail modules) were developed in this work, as shown in Figure 1a and b. As shown in Figure 1c, all modules have a magnet-based connection at both ends, and the actuating modules have additional assisting plates that define the actuation characteristics and mode of deformation of the modules.

The contractile modules have two trapezoidal plates on each side to produce a linear contraction, and the channeling modules have a rectangular plate on each side to limit the motion and act as a channel for air flow. The edge bending modules have two triangular plates attached on both sides of one edge, which makes the actuator bend around this edge, while the face bending modules have a rectangular plate on one of their faces, which makes the actuator bend around this face. The clockwise (CW) and counterclockwise (CCW) twisting modules have two triangular plates on each of their faces to produce twisting motions in the intended direction. Each of these modules weighs ∼45 g. The head module is the main input channel for the modules and serves as a connection to the mechanical ground, while the spine module blocks the air flow from the previous module and offers an additional input channel for subsequent modules.
This allows for the ROV-PAM system to have several sections that can be controlled separately. The tail module closes the last actuating module and provides a connection to an external component, such as an end-effector. Each of these modules weighs ∼40 g. Most of the ROV-PAM systems presented in this study have modules with the same area connected in series, as shown in Figure 1d. However, it is also possible to build a system with larger supporting modules as shown on the right side of Figure 1b to attach multiple actuating modules in parallel for higher performance as will be demonstrated later in the application section. Notice that the assisting plates do not cover the whole surface to prevent possible overlapping between them during actuation.
Analytical model
The performance of the ROV-PAM modules can be predicted by an analytical model derived based on the law of conservation of energy. To do so, representative points are extracted that can illustrate how the shape of the module changes during actuation: six vertices from the top and bottom plates, three points from the middle of the module for the contractile modules, two points from the center of each side without rectangular assisting plates for the bending modules, two points from the center of top and bottom plates, and one point at the center of the module for twisting modules (Fig. 2a). From the volume bound by these points, the volume change during the deformation can be calculated assuming that the faces that connect the representative points remain flat during actuation (Supplementary Fig. S1), and the module does not store any elastic energy during the actuation, which results in:

where VC, VB, and VT are the volumes of the contractile, bending, and twisting modules, respectively, L is the side length of the top and bottom plates, h is the current height of the module, h0 is the initial height of the module, a is a geometrical constant that corresponds to 1 for a face bending module and 2 for a edge bending module, θ is the bending angle, and ϕ is the twisting angle of the module (Fig. 2b).
Then, the performance of the actuating modules can be expressed using the law of conservation of energy. For contractile and bending modules, this becomes:
where P is the negative pressure applied to the module, b and c are geometrical constants which are 6 and 3 for face bending modules, and 12 and 6 for edge bending modules. For the twisting module, we can write:
where F and T are the contracting force and twisting torque the module produces, respectively, R is the ratio between the energy produced from the contractile and twisting motions. From the experiments, it is shown that the ratio R can be any value between 0 and 1 due to the free deformation of the thin film (Supplementary Fig. S2), and modeling this behavior for all values of R would require a complex analysis outside the scope of this study. Thus, the ratio is set to be 1 in this model, which happens when the payload acts only in the longitudinal direction, which results in:
This approach can be applied to other cases such as when R is equal to 0. More details about the model can be found in the Supplementary Data.
Experimental method
Throughout this study, a portable vacuum pump (SP 620 EC-VD; Schwarzer) is used as a vacuum source, and an electropneumatic vacuum regulator (ITV2090; SMC) is used to control the vacuum pressure. A force–torque sensor (RFT60-HA01; Robotous) is attached at one end of an actuator to measure the force and torque in blocked force and torque experiments, and an Arduino microcontroller is used to control the regulator and collect data. All actuating modules are built as triangular prism with side lengths of 60 mm and heights of 35 mm. All rigid parts are printed using a 3D printer (UltiMaker 3; UltiMaker) with a 0.4 mm nozzle and a layer height of 0.1 mm. A roll of 0.1 mm PVC film (Whashin) and EVA hot melt (Pandago) are used to manufacture the main body of the modules. Small square neodymium magnets (346; semyeong) with dimensions of 10 × 5 × 2T are used to create magnet-based connections at each end of the module.
Results
Model validation
We first conducted experiments to verify the analytical models of each type of module shown in the previous section. The contractile ROV-PAM module was first tested as it has the most basic deformation mode among the four modules and has the simplest structure (Fig. 3a). The module was fixed to the testing jig using bolts as the maximum holding force of the magnetic attachment of the module is ∼10 N, which is smaller than the predicted blocked force of the module at small contraction ratios. Results follow the model well in the 20–60% contraction ratio range but depart from the model at a contraction ratio of 80%. This is due to the side films and assisting plates being fully folded inward and starting to be compressed at this contraction ratio, which decreases the output force of the actuator.
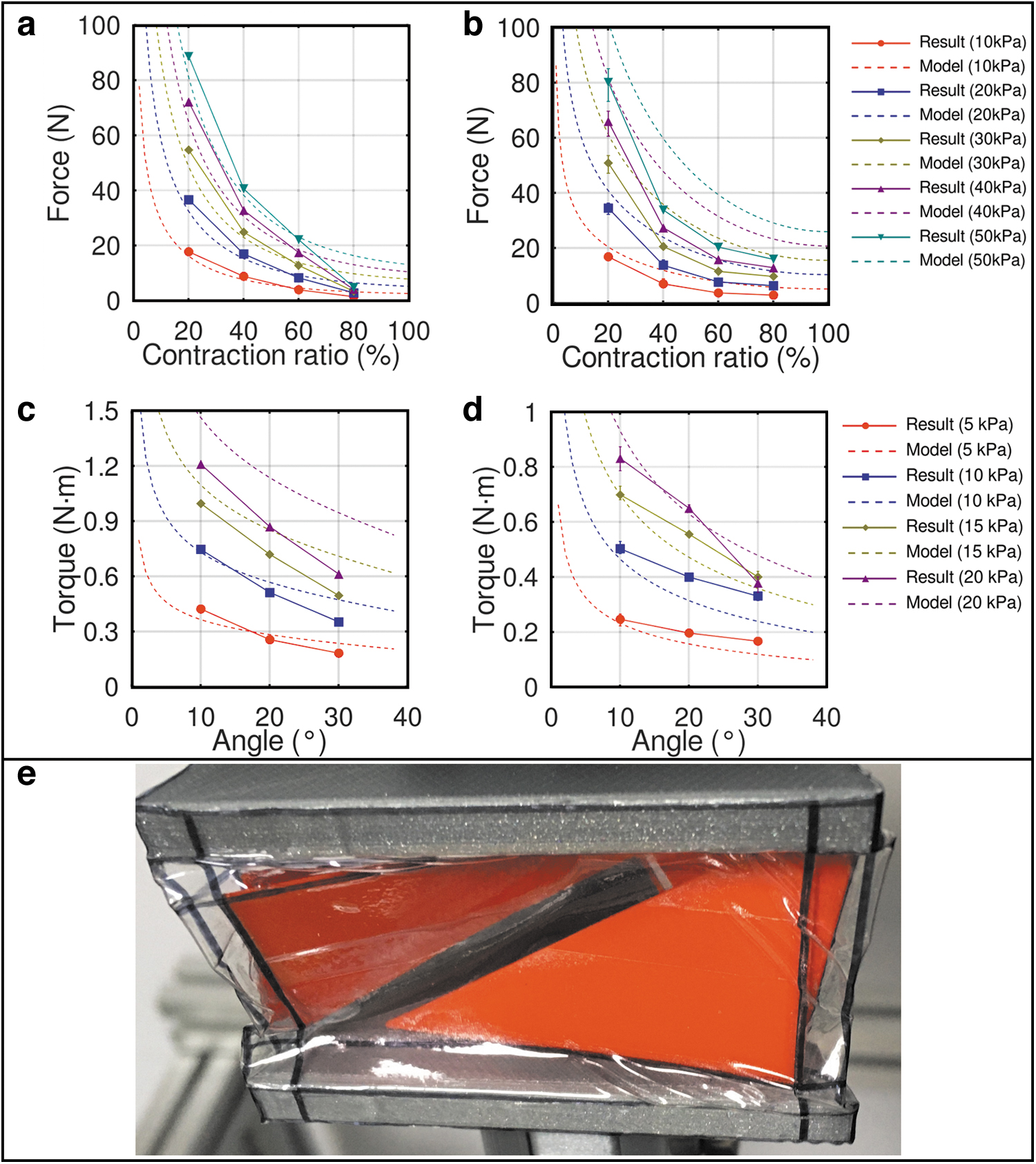
Blocked force and torque of the ROV-PAM:
For the twisting module, the result follows the analytical model with reasonable error at lower pressures or when the contraction ratio is small (Fig. 3b). The error becomes larger at higher pressures and at larger contraction ratios due to the unintended deformation of the film, which is not taken into account by the analytical model (Fig. 3e). As discussed in the Supplementary Data, the twisting module can undergo large changes in shape due to the compliance of the film, which results in an error in the predicted cross-sectional area. To reduce this error, the module could be made of other strong materials so that it maintains its shape even under high pressure.
The results for both the edge and face bending modules follow the model well at small pressure (Fig. 3c, d). As the pressure increases, the torque does not scale proportionally, which indicates that there may be stretching of the PVC film or unintended deformations occurring. It would be necessary to reinforce the module to enable it to perform better at higher pressures. Overall, the results show that the proposed simple analytical model can predict the behavior of the different modules at low pressure and that the module may require material or assembly improvements to perform accordingly its theoretical limit in performance.
Modularity
The modular capabilities of the ROV-PAM can be utilized in many different ways, and one of them is for extending the working range of its basic modules by connecting the same types of modules to build a homogeneous system. Contractile and bending homogeneous systems containing 1, 2, and 3 contractile and bending modules in series were built, and vacuum pressure was applied to each to verify the scaling effect of adding modules in series (Fig. 4a, b; Supplementary Video S1). All systems showed that the deformation scales proportionally to the number of connected modules, and it confirms that the working range of ROV-PAMs can be easily altered by adding more modules in series to execute a given task.

ROV-PAM modules placed serially to extend their
ROV-PAM modules can also be connected serially as an heterogeneous system by connecting different types of modules to produce more complex deformations, which may be required for certain types of complex tasks. Three types of heterogeneous systems making use of a combination of bending and channeling modules were built. The first system produces a “J”-shaped deformation where a channeling module stands straight providing air flow to the subsequent face bending modules (Fig. 5a; Supplementary Video S2). The second produces a wave-shaped deformation, with the two edge bending modules starting a wave, followed by four consecutive edge and face bending modules responsible for creating each half of the wave (Fig. 5b).
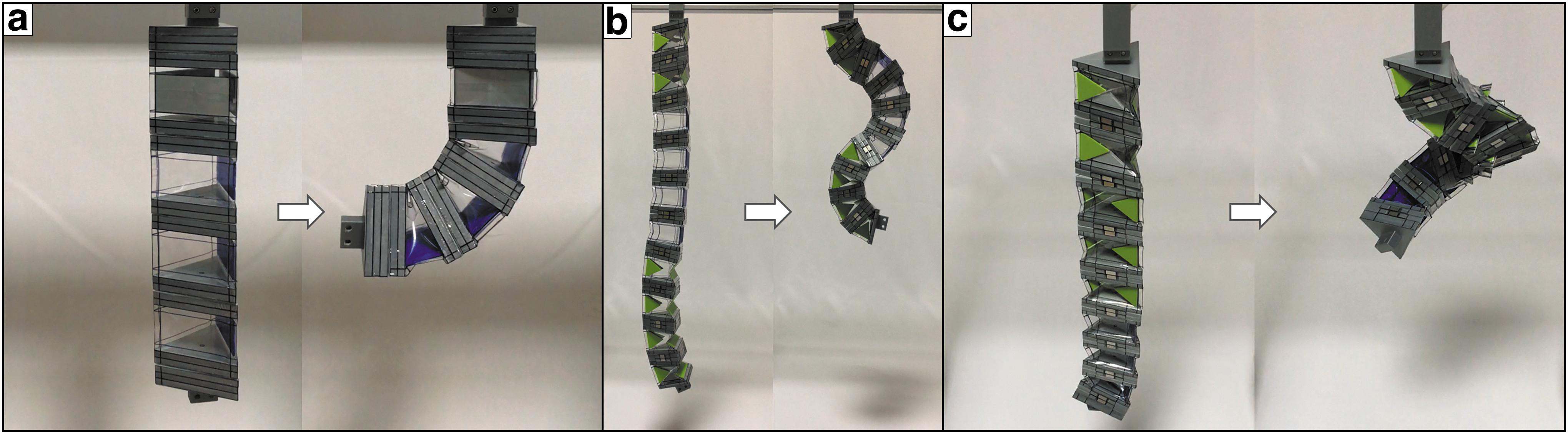
ROV-PAM modules creating
Then, a helix-shaped deformation was produced with two edge bending modules creating the tilted base for the subsequent modules and three consecutive edge and face bending modules assembled with the orientation rotated by 120° that form the main helix shape (Fig. 5c). This shows that ROV-PAM modules can be easily reconfigured to produce complex deformations by changing the type and orientation of the modules.
As all ROV-PAM modules share the same basic structure, it is possible to connect the modules in parallel to make the modules cooperate and increase the performance of the system. To demonstrate this, two types of cooperating system were built with the configuration shown in Figure 6a and then compared with a corresponding single module system. The first system consists of three contractile modules, which were vacuumed to lift a payload of 500 g. The single module counterpart with a single contractile module required 25 kPa of vacuum pressure to lift the payload, while the cooperating contractile ROV-PAM system required only 15 kPa of pressure, which means that it needs 40% less pressure to produce the same force (Fig. 6b; Supplementary Video S3). Afterward, a vacuum pressure of 20 kPa was applied to the cooperating contractile ROV-PAM system and its single module counterpart with a payload of 1000 g (Fig. 6c). The single module produced a contraction ratio of 47.1%, while the cooperating contractile ROV-PAM system produced a contraction ratio of 75.7%, corresponding to an increase of 61%.

The second system consists of two edge bending modules and one contractile module. This cooperating bending system and its single module counterpart with a single face bending module were vacuumed to produce a bending deformation with a payload of 500 g (Fig. 6d). This time, the single module counterpart required 30 kPa of pressure, while the cooperating bending system required only 15 kPa of pressure, which corresponds to a reduction of 50% (Fig. 6d). Then, a vacuum pressure of 20 kPa was applied to the cooperating bending system and the single module counterpart with a payload of 1000 g (Fig. 6e). The single module produced a bending angle of 18.8°, while the cooperating bending system produced a bending angle of 26.1°, resulting in an increase of 39% at the same pressure. These results showed that the cooperating system reduces the pressure required to achieve a target performance and increases the maximum performance with modules working cooperatively.
As ROV-PAM modules can produce a wide range of types of deformation, it is possible to build a service robot capable of targeted tasks. To demonstrate this, a block sorting robot that consists of one CW twisting module, one CCW twisting module, and two contractile modules was built with two spine modules that separate each module segment and a gripper attached at the bottom of the robot (Fig. 7; Supplementary Video S4). The two spine modules allow for separate control of CW, CCW, and contractile motions of the different modules. There were two types of block, red and yellow, with three different vertical positions, while their corresponding bins were placed on the left and right sides of the robot. By applying vacuum pressure to a specific module segment in the right order, the contractile modules adjusted the length of the robot, and the twisting modules changed the orientation of the gripper so that the robot could pick up and place the blocks into the right bin regardless of their position. This shows the potential of ROV-PAM modules to build a system capable of completing tasks by utilizing combinations of different modules.

An ROV-PAM-based block sorting robot consists of three actuating module segments separated by two spine modules, which enables the robot to move up, pick up the block, turn around, and then place the block into the right bin.
Discussion
The ROV-PAM system is a modular actuator system that can produce contractile, bending, and twisting motions with the ability to control different sections by using intermediary spine modules, which gives additional segmentations of the air channels of the system. Being made of 3D-printed parts and a thin film, the ROV-PAM modules have a basic yet effective and lightweight structure, which allows us to derive a simple analytical model. The model was verified experimentally such that it could be used for changing the basic dimensions of the actuator when we design a robot for real-world applications. By changing the serial configuration of the assembly of the modules, the ROV-PAM system can alter its behavior, and by changing the parallel configuration, the system can alter its performance. Being able to alter both its behavior and performance, the ROV-PAM system has the potential to be highly adaptable to complete evolving tasks.
There are several improvements that can be made to the ROV-PAM modules presented in this study. The model used in this study has low accuracy for bending and twisting modules especially when large vacuum pressure is applied. This is mainly due to the deformation of the thin PVC film used to build the module and can cause problems when high precision is required. To resolve this issue, a thicker film or stronger material such as tarpaulin could be used. By doing so, the module would keep its shape during actuation and thus increase its accuracy at the cost of decreasing the actuation range due to the added thickness and friction caused by the film itself. Also, the merit of the ROV-PAM system comes from its ability to build a system with many modules.
While not significant for a single module, each connector between two modules introduces small air leakage, which can build up to a more significant leak as more modules are added. Although the best solution to this issue would be manufacturing modules with precise dimensions to lower the air leakage to a negligible level, it can increase the cost of manufacturing. Other solutions include developing new pneumatic connection methods between modules or using the channeling modules as vacuum tanks to reduce the effect of leaks.
Finally, the functionality of individual ROV-PAM modules is fixed, and a system making use of these modules needs manual module replacement to modify its behavior. To make a truly versatile robotics system, the whole process should be done automatically to make it possible for the system to complete any task at will. Variable stiffness material such as phase change material can be used to replace assisting plates on the side walls so that the functionality of the module can change freely. This will increase the complexity of the system as more elements need to be added with limited space such that further research is required to make this a viable option.
Conclusions
The ROV-PAM modules presented in this study utilize vacuum pressure to produce contractile, bending, and twisting motions using the same basic triangular prism structure with different layouts of assisting plates on their side walls. Utilizing their modular design, they can be used in many different ways, including extending their working range, creating complex geometries, and cooperating to enhance their performance, which allows us to flexibly achieve different tasks by rearranging them. Other functions harnessing the flexibility of this concept could also be discovered in the future. Fluidic modules were also introduced, which are necessary for segmenting and pressurizing different sections of the system separately and obtaining a versatile system. Previous works on modular fluidic actuators generally focused on one or two modes of deformation or had a mode of deformation with significantly weaker performance, and they generally overlooked the fluidic elements required to segment the different sections of the structure into distinct fluidic chambers.
A block sorting robot was built by using three different types of modules, and the robot successfully completes its task picking the blocks at different levels and placing them in the right bin. Other types of modules could also be developed to provide further functionalities, such as fluidic elements or modular pumps. The possible combinations of this system are endless, and this concept can be used to realize universal robots that can be adapted for any scenario. Future work will focus on improving the system's versatility with hinge-based assisting plates to enable functionality change, deriving a sophisticated model that can provide better accuracy and finding other real-world applications suitable for the ROV-PAM system.
Footnotes
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIT) (No. RS-2023-00207772 and No. 2021R1A2C4001792), and by the Technology Innovation Program (20022884) funded By the Ministry of Trade, Industry and Energy (MOTIE, Korea).
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.