
Abstract
The emergence of bionic soft robots has led to an increased demand for bionic soft actuating ends. In this study, a three-dimensional spiral water hydraulic soft actuator (3D-SWHSA), inspired by the winding action of an elephant's trunk, is proposed to provide a more targeted soft actuator catching method. The 3D-SWHSA is composed of multiple bending and twisting units (BATUs), which can produce winding deformation after being pressed. By using the principles of virtual work and integrating the Yeoh 3rd order model, a predictive model for winding was established to investigate the bending and twisting characteristics of BATUs with varying structural parameters through finite element simulation. Following the selection of an optimal set of structural parameters for the 3D-SWHSA, its bending and deformation capabilities were simulated using finite element analysis and subsequently validated experimentally. To validate its flexibility, adaptability, and biocompatibility, successful catching experiments were conducted in both air and underwater environments. Underwater organisms, including organisms with soft appearance such as starfish and sea cucumbers, and organisms with hard shell, such as sea snails and crabs, can also be caught harmlessly. In cases where a single 3D-SWHSA is insufficient for capturing objects with unstable centers of gravity or when the capture range is exceeded, the double 3D-SWHSAs can be utilized for cooperative winding. This study affirms the great potential of 3D-SWHSA in diverse marine applications, including but not limited to marine exploration, fishing, and operations.
Introduction
With the progressive research in materials science, the invention and use of hyperelastic materials have driven the development of bionic soft robots.1,2 The incorporation of hyperelastic materials, which possess resilience and ductility, into bionic machines allows them to express biological movements more accurately. Soft robots made from hyperelastic materials have flexibility, continuity, greater adaptability, and dexterity than traditional rigid robots.3–5
In nature, the behavioral habits of many organisms exhibit spiral curl movements of specific organs, 6 as shown in Figure 1a–c. For example, elephants curl objects with their trunks, pythons wrap their bodies around climbing objects, and the spiral curl of octopus wrist feet, achieving spiral movements attributed to muscular hydrodynamic regulation.

Bionic principle and basis of research and geometric model.
In the case of the elephant trunk, as shown in Figure 1d, the contraction of specific oblique muscles leads to the twisting of the trunk around the longitudinal axis, and the uniform contraction of the radial muscles leads to uniform lengthening of the trunk, while the contraction of the longitudinal muscles on one side of the trunk, together with contraction of the radial muscles, leads to trunk flexion with precise and infinite degrees of freedom of movement.7–9 Inspired by the morphology of biological organisms, soft actuators made of hyperelastic materials have been used to perform complex curl-like movements by various methods. 10
In recent research, soft actuators made from a hyperelastic material base can softly mimic biological coiling behavior, and a typical structure to achieve this complex action is the integration of a strain constraint within a soft actuator. 11 When the body expands under pressure, the strain constraint applies a contraction force similar to that of biological muscle fibers to the soft actuator, manipulating to produce a specific morphological change. 12 A fiber weave grid with built-in rigid padding is used to act as a strain constraint.13,14 Specific morphological changes (stretching, twisting, bending, swelling) can be achieved by varying the fiber weave arrangement of the individual soft actuators. 15 In addition, when the individual fiber arrangements are connected in series, the soft actuators can perform more complex curling motions16,17 or imitate manual bending motions. 13
Embedding a special arrangement of nanofibers into the interior of the soft actuator makes it stronger as it achieves bending and twisting deformations, 18 and makes it into a gripper for fragile marine organisms such as jellyfish. 19 However, the manufacturing process of fiber-wound actuators is very cumbersome, such as adding the step of winding fiber restraints and secondary casting in the manufacturing process, 20 and most of them are pneumatically driven.
In soft pneumatic actuators, multiple parallel bellows sections are jointly driven, and specific spiral changes can be achieved by manipulating the pressure values within the bellows on different sides, 21 and fast pneumatic grid structures are widely used in the field of soft robotics, 22 where bending and twisting motions corresponding to the pressure can be produced by changing the arrangement layout of the chambers and passing a constant pressure into the actuator. 23 However, pneumatic-driven soft actuators often have the drawbacks of poor pressure-bearing capacity, redundant air source equipment, and nonapplicability in deep sea.
Soft actuators made of smart materials can also be deformed by applying strain fields to accomplish the curling action, incorporating thermally mutagenic materials or liquid alloys 24 on a soft substrate that undergoes reversible reconfiguration by regulating the temperature.25–27 The reversible conversion of a three-dimensional (3D) helical deformation can be achieved by synthesizing special liquid crystal materials by modulating the wavelength of UV light and near-infrared light. 28 Similarly, soft actuators made of electroactive polymers can produce curling motions under the excitation of electric currents. 29 However, the strain field required for smart materials in practical applications has the disadvantage of being difficult to impose and high energy consumption.
In our previous research, a water hydraulic soft actuator (WHSA) made of thermoplastic polyurethane (TPU) material was investigated, which can perfectly perform the bending motion in two-dimensional plane, as shown in Figure 1e and f. To enable the soft actuator to achieve spiral curling motion in three dimensions, inspired by the spiral curling behavior of elephant trunk and combined with fused deposition manufacture (FDM)-3D printing technology, this study developed a three-dimensional spiral water hydraulic soft actuator (3D-SWHSA). It has excellent adaptability, two catch modes, double 3D-SWHSA cooperation capability, and the ability of underwater biological catching. Using water as the working medium, water hydraulics has inherent advantages such as good drive performance, environmental compatibility and adaptability, low maintenance costs, and is more friendly in the marine environment. 30
In this article, (1) a soft actuator with 3D spiral deformation is designed and theoretically modeled., (2) the bending and torsional characteristics of the bending and torsional unit (BATU) composed of 3D-SWHSA are investigated by finite element analysis and experiments at a pressure of 1.0 MPa, (3) the most ideal set of structures are selected and made into a 3D-SWHSA, and its winding deformation under the pressure of 1.0 MPa is analyzed by finite element analysis and an experiment, and (4) the 3D-SWHSA winding capability in the air and underwater and the cooperative performance of double 3D-SWHSAs are validated.
Materials and Methods
Research preparation
In this study, water hydraulic soft helical actuators were fabricated using FDM-3D printing technology, as depicted in Figure 2i. To produce a class of soft actuators with semicircular chambers, the initial layer of the actuator was altered from its previous position on the side to the bottom surface (the limiting layer). The setup parameters for the 3D printer are presented in Table 1. It is worth mentioning that we changed the nozzle diameter of the 3D printer from the usual 0.4 to 1.0 mm, which directly reduces the manufacturing time of 3D-SWHSA by 60%. 22 The thermoplastic elastomer TPU (Shenzhen eSUN Industrial Co., Ltd., China) with a Shore hardness of 95A was selected as the material for 3D-SWHSA due to its high pressure stability, and low fracture susceptibility, and it also satisfies the 2.0 MPa pressure requirement of 3D-SWHSA.
Structural parameters of 3D-SWHSA.
Fused Deposition Manufacture Printing and Postprocessing Parameters Using Thermoplastic Polyurethane Material
All experiments involving subjects in this article were approved by the Research Ethics Committee of Beijing University of Technology, Beijing, China. The scientific and technical ethical review number involved is: FMMKJLL-2023-4.
Actuator structure design
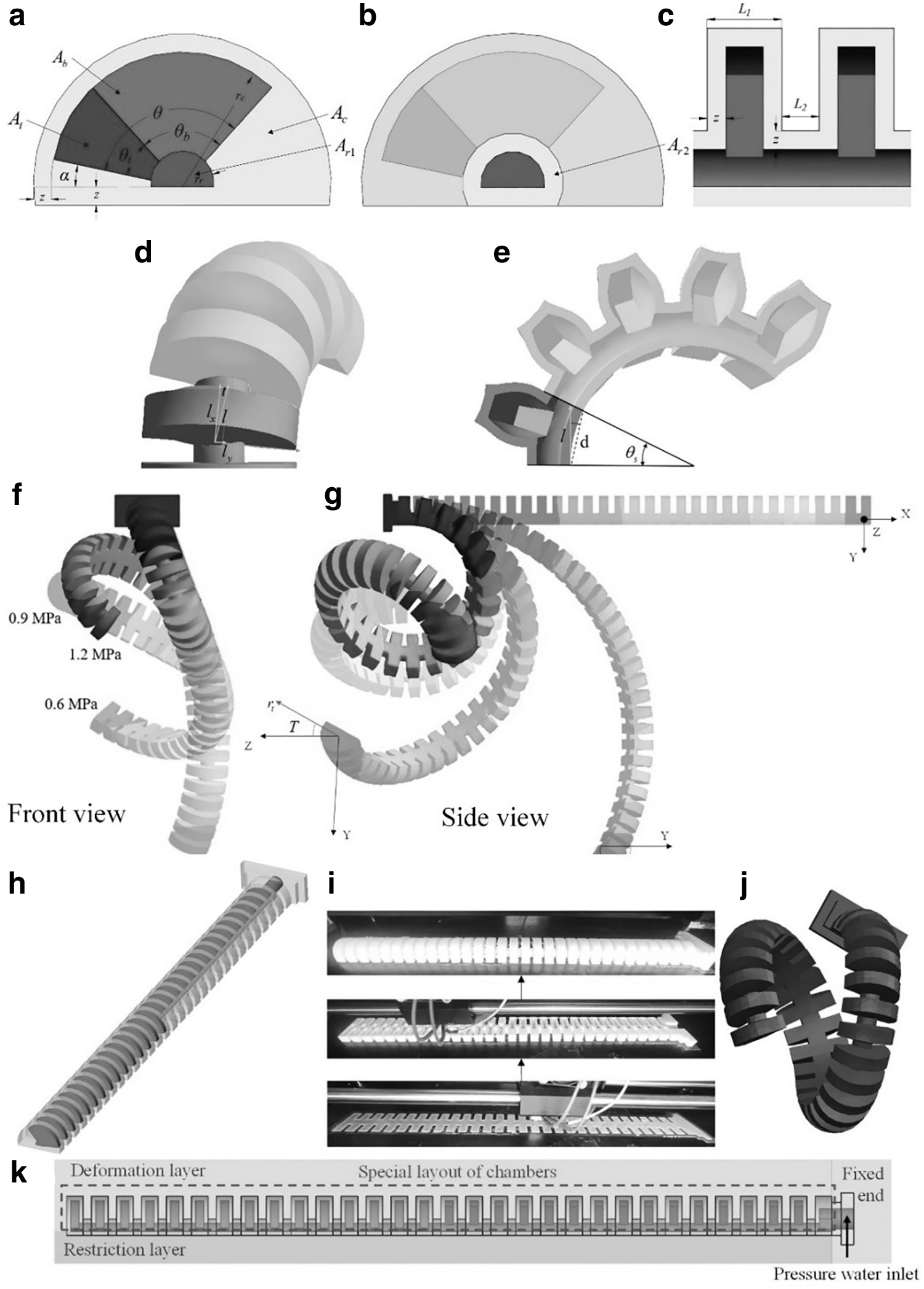
In this study, as shown in Figure 2h, the water hydraulic 3D helical actuator has an interconnected multichamber structure with one open end and a closed end. In Figure 2k, its upper part is a specially laid out multichamber deformation layer and the lower part is a nonextendable layer.
In this study, as depicted in Figure 2h, the water hydraulic 3D helical actuator features an interconnected multichamber structure with one open end and a closed opposite end. As illustrated in Figure 2k, its upper portion comprises a specially designed multichamber deformation layer, while the lower part is composed of a nonextendable layer. In contrast to previous studies, the multichamber deformation layer comprises interconnected semicylindrical chambers that alter the circular angle and declination of sector cavities, resulting in a unique layout design capable of producing 3D spiral deformation. Compared with conventional pneumatic grid soft actuators, this 3D spiral actuator offers greater flexibility. When pressure water enters the 3D spiral actuator, the deformation layer expands and deforms, while the inextensible layer constrains the actuator's deformation.
To make the nonstretchable layer better limit the axial deformation of the actuator, the nonstretchable layer is fabricated with an additional 1 mm thickness during the 3D printing process. This ultimately results in spiral deformation of the actuator due to joint action between the deformation and inextensible layers, as depicted in Figure 2j. The unique chamber structure results in the spiral deformation of the actuator, and this study primarily investigates how the circular angle and the eccentric angle of the sector cavity impact the generation of spiral bending.
Winding deformation prediction model
The accuracy of the deformation prediction model in 3D-SWHSA has a significant impact on simulation and experimental validation precision. As 3D-SWHSA shares structural similarities with the previously developed WHSA, it can be studied using the same modeling method as WHSA. The Yeoh 3rd order model is used to develop the bending deformation prediction model. The mathematical model for the bending and twisting angles of a single-cavity actuator is established by combining the intrinsic hyperelastic material model with the principle of virtual work. The TPU material is assumed to be isotropic and incompressible, and its internal structure is based on the stress–strain theory, expressed as a strain energy density function W.

where I1, I2, and I3 are the deformation tensor invariants and
According to the Yeoh 3rd order model, a typical binomial parameter form is chosen, and Equation (4) is substituted into Equation (1), the strain energy density function model can be expressed as follows:

here
Previous uniaxial tensile experiments on TPU-95A have measured the material constants for this material with respect to the Yeoh 3rd order model, C10 = 12.3375, C20 = 0.163302, and C30 = −0.000505747. Segmented constant curvature is assumed to use the differential idea to divide the 3D-SWHSA into successive small segments, each of which is a circular arc with a certain curvature in a tiny length range. In addition, the bending of 3D-SWHSA can be regarded as the connection of each individual chamber bending circular arc segment.
As depicted in Figure 2a,
r
c
is the radius of the sector chamber, rr is the radius of the sector flow channel,
As illustrated in Figure 2d and e, the bending angle of a single chamber is defined as well as the twisting angle, which represents the angle between the deformation direction of a single chamber and the axial direction of an actuator (assuming uniform deformation for each chamber at identical input pressure).
Assuming that the 3D-SWHSA is not subjected to self-weight and external forces during deformation, according to the principle of virtual work,
30
the sum of work done and energy stored in the system equals zero at any infinitesimal virtual displacement. The driving hydraulic's work is fully converted into energy stored in the actuator after deformation.
31
where
Volume of the chamber after deformation is as follows:
The approximate calculation gives the following:
From the literature,
26
it is known that the elongation ratio in the length direction of a single chamber can be expressed as follows:
The mathematical model between the input pressure and the bending angle can be obtained as follows:
In Equation (14),
As depicted in Figure 2d and e, when the deformation at the bottom of a single chamber is sufficiently small during 3D-SWHSA bending, the chord length d of the deformation curve can be approximated as the total length l of the single chamber deformation and orthogonally decomposed into lx and ly, based on the torsion angle t.
The twisting angle of the single-chamber deformation in the radial direction can be deduced from the angle between the chamber deformation and its projection on the Y-axis.
As depicted in Figure 2f, the 3D-SWHSA exhibits helical deformation under varying pressures. In addition, as illustrated in Figure 2g, T is the total twisting angle of 3D-SWHSA and B is the total bending angle of 3D-SWHSA. Based on the assumption of segmented constant curvature, a multicavity deformation model is developed from the single-cavity deformation.
Results Analysis
Determination of bending and twisting capacity
The 3D-SWHSA comprises multiple sets of BATUs connected in series, with each bending unit consisting of five consecutive cavities. Subsequently, the bending and twisting actuators (BATAs) will be fabricated, simulated, and experimented to validate the correctness of the BATU. The effect on helical deformation will be explored by varying the roundness and inclination of fan-shaped cavities. Simulation and experimental analyses of the bending angle and torsion angle for BATA with different rounding angles and their corresponding different eccentric angles are illustrated in Figure 3.

Simulation and experimental analysis of bending angle and torsion angle for BATAs with different rounding angles and their corresponding different eccentric angles.
In Figure 3a–c, the deflection angle of BATA is designed to remain constant. In the structural design of BATA, an increase in circle angle results in greater bending under pressure and larger deflection angles, but smaller twisting angles under pressure. In the process of actuator deformation under pressure, based on experimental and simulated values of deformation trends, it can be concluded that the bend-twist actuator meets expectations in terms of performance under pressure. However, there is a certain discrepancy between simulated and experimental values, which may be attributed to manufacturing defects. In Figure 3d, the deflection angle of BATA is designed with two types of equal variation, where the difference between the deflection angles of adjacent chambers follows an increasing and decreasing relationship. Furthermore, the mapping relationship among the variations in round angle, deflection angle, and deformation under pressure aligns with the aforementioned inference.
Both BATA-S (spiral) and BATA-IS (inverse spiral) exhibit excellent bending and twisting capabilities. While BATA-S has better twisting ability compared with BATA-IS, it is slightly inferior in bending ability.
R is the radius of curvature of a single chamber after deformation under pressure.
h is the pitch of the deformed helix shape of 3D-SWHSA and t is the range of the loops.
The deformation principle of bending and twisting of BATU by changing the sector circularity and eccentricity has been thoroughly investigated and confirmed up to this point. Subsequently, this principle is applied to 3D-SWHSA, which is selected for subsequent spiral deformation experiments.
To distinguish 3D-SWHSAs with distinct structural dimensions, their nomenclature follows the following format: 3D-SWHSAs featuring BATA structures are referred to as
Measurement of winding ability of 3D-SWHSA
The cavity structure of 3D-SWHSA, as depicted in Figure 4, is designed with a deflection angle that undergoes spiral curl deformation upon the entry of pressurized water. Remarkably, the direction of this curl deformation is opposite to that of the closest cavity's deflection toward the pressure water inlet. In addition, Figure 4b–e illustrates how pitch h decreases proportionally with increasing deflection angle

Simulation and experimental analysis of the bending and torsion angles of 3D-SWHSA after compression for a circular angle of 120° and its corresponding different deflection angles.
The experimental values of the end motion trajectories for the five actuators closely match their simulated counterparts during pressurized deformation from 0 to 1.0 MPa, with end positions recorded at every 0.1 MPa interval, as illustrated in Figure 4. However, there are still some discrepancies due to the nonuniformity of TPU material in the soft actuator made by stacked layers of FDM printing, resulting in a slight deviation from the simulation model. In addition, as depicted in Figure 4g, the measurement accuracy may be compromised by using coordinate paper for X- and Y-axis deformation coordinates and laser displacement sensors for measuring the deformation coordinates of Z-axis.
Based on deformation experiments, it is inferred that the 3D-SWHSA of 120&6&54 exhibits excessive pitch and twisting during pressure deformation, resulting in incomplete capture area as shown in Figure 4b. Also, the 3D-SWHSAs of 120&6, 120&18&42, and 120&24&36 all interfere during deformation, as given in Figure 4a, d, and e. Therefore, for the subsequent experiments involving coiling objects and coiling heavy objects under a maximum pressure of 2.0 MPa, the 3D-SWHSA of 120&12&48 was selected.
Single 3D-SWHSA catch experiment
In consideration of the coil deformation characteristics of 3D-SWHSA, its catching experiments are divided into two categories: wrapped form of winding and lifting experiments through the handle. As illustrated in Figure 5, the former was conducted on square cartons (a), hand papers (b), and fascia guns (c); while the latter was performed on fruit baskets (d), handbags (e), and hot water bottles (f). Supplementary Videos related to this experiment can be found at support documents (Supplementary Video S2 of Fig. 5).

Catching experiments in the air. Winding catch:
During the winding process of the square carton (a), it is crucial to control the catching position properly to ensure that the center of gravity remains within the catching range of 3D-SWHSA. This is particularly important due to the excessive length of the carton, as there is a risk of slipping out if not properly controlled. On the contrary, moderately long rolls of lavatory paper (b) and fascia guns (c) exhibit good winding performance. In addition, the 3D-SWHSA demonstrates excellent lifting capabilities when handling objects with handles (d–f). During the process of winding the toilet paper, it was observed that the 3D-SWHSA exhibited no water seepage and maintained its high density, as evidenced by the absence of soaking in the toilet paper.
Double 3D-SWHSA cooperative catching experiment
To prevent slippage caused by improper center of gravity positioning during the winding of elongated objects, a pair of 3D-SWHSAs with identical structural parameters were used for cooperative catching experiment.
As depicted in Figure 6, the trigonal carton (a), cylindrical paper tube (b), badminton bag (c), and 2.5 kg dumbbell were collectively wound. Supplementary Videos pertaining to this experiment can be accessed through support documents (Supplementary Video S3 of Fig. 6). When utilizing double 3D-SWHSAs for cooperative winding, it is imperative to ensure that the captured object's center of gravity lies between the dual actuators to achieve seamless winding, as demonstrated by the successful winding of both a trigonal carton (a) and a cylindrical paper tube (b). When utilizing double 3D-SWHSAs for cooperative winding, it is imperative to ensure that the captured object's center of gravity lies between the dual actuators to achieve seamless winding, as demonstrated by the successful winding of both a trigonal cassette (a) and a cylindrical paper tube (b).
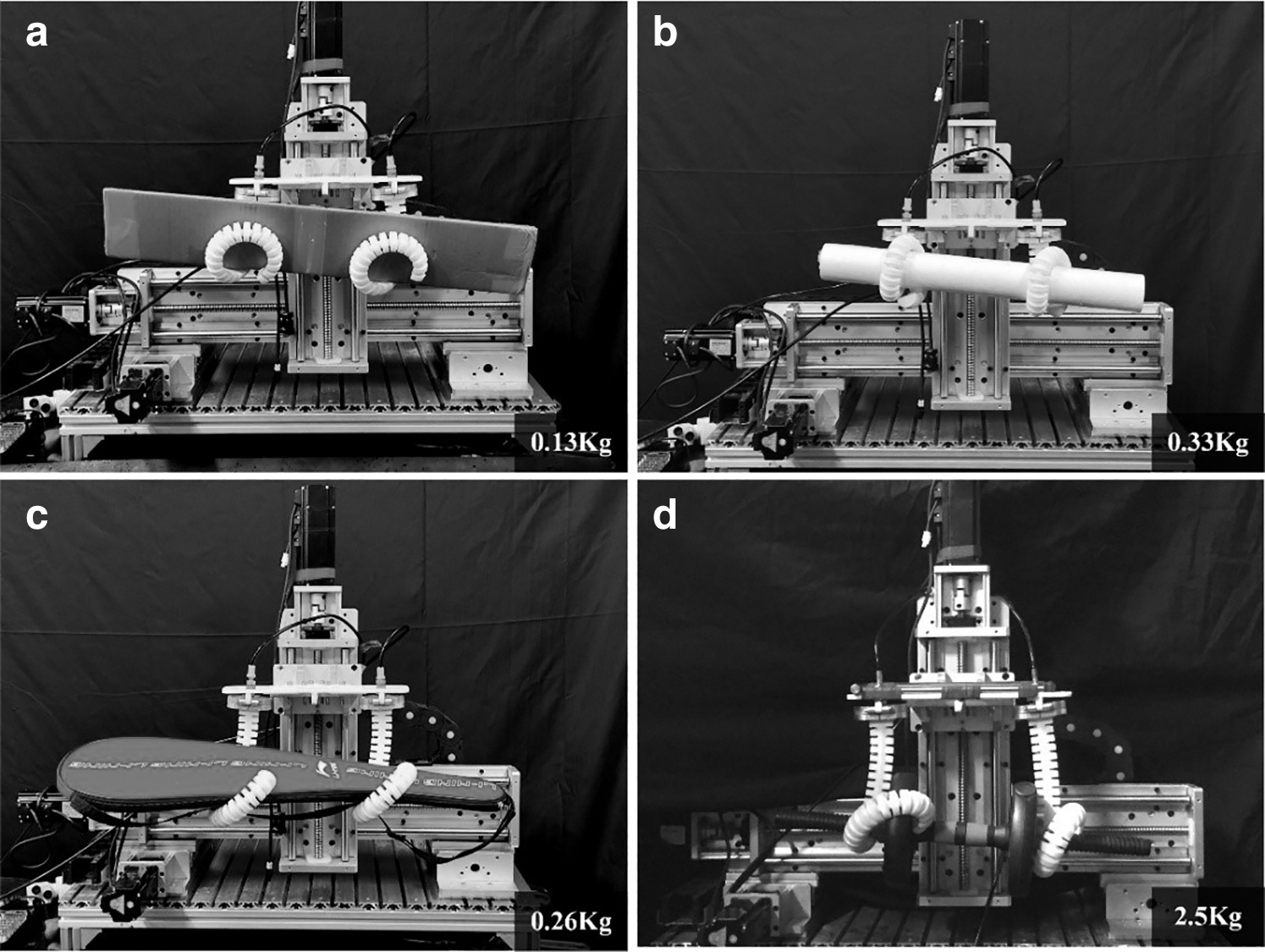
Cooperative catch experiment of double 3D-SWHSAs.
Just similar to the badminton racket bag (c) with a profile that is narrow at one end and wide at the other, the 3D-SWHSA benefits from the pliability of its soft material, enabling it to adaptively capture objects with irregular profiles. The same wind stability exhibited by double 3D-SWHSAs is demonstrated when coiling a 2.5 kg dumbbell.
Heavy lifting experiment
To validate the winding capability of 3D-SWHSA, as depicted in Figure 7, a pressure of 2.0 MPa was applied to fill the device with water. Subsequently, plastic bags containing weights ranging from 5 to 20 kg were lifted using the device. Despite some degree of water seepage on the surface of 3D-SWHSA when lifting a weight of 20 kg, successful completion of the task was achieved. The net weight of 3D-SWHSA is a mere 170 g, yet it boasts a lifting capacity that exceeds its own weight by an impressive factor of 117.65. Supplementary Videos pertaining to this experiment can be accessed via the support documents (Supplementary Video S4 of Fig. 7a–d).

Experiments to lift weights and catch underwater organisms.
Underwater organism catch experiment
The 3D-SWHSA is highly flexible and adaptable, capable of capturing not only common objects but also aquatic creatures. As depicted in Figure 7, the capture attitude must be manually adjusted due to the inability of the XYZ-three-axis moving platform to adjust in real time according to the creature's state. Supplementary Videos pertaining to this experiment can be found in support documents (Supplementary Video S5 of Fig. 7e–h).
The experiments have confirmed that the 3D-SWHSA does not cause any harm to soft-bodied marine organisms, such as sea stars (a) and sea cucumbers (b), during the winding process due to the use of TPU material, which provides sufficient softness. For marine organisms with hard shells, such as crabs (c) and sea snails (d), experiments have demonstrated that the 3D-SWHSA can adapt to the morphology of the captured object during the winding process without causing any damage to its shell, which is particularly beneficial for preserving the aesthetic value of collectible sea snails.
Discussion
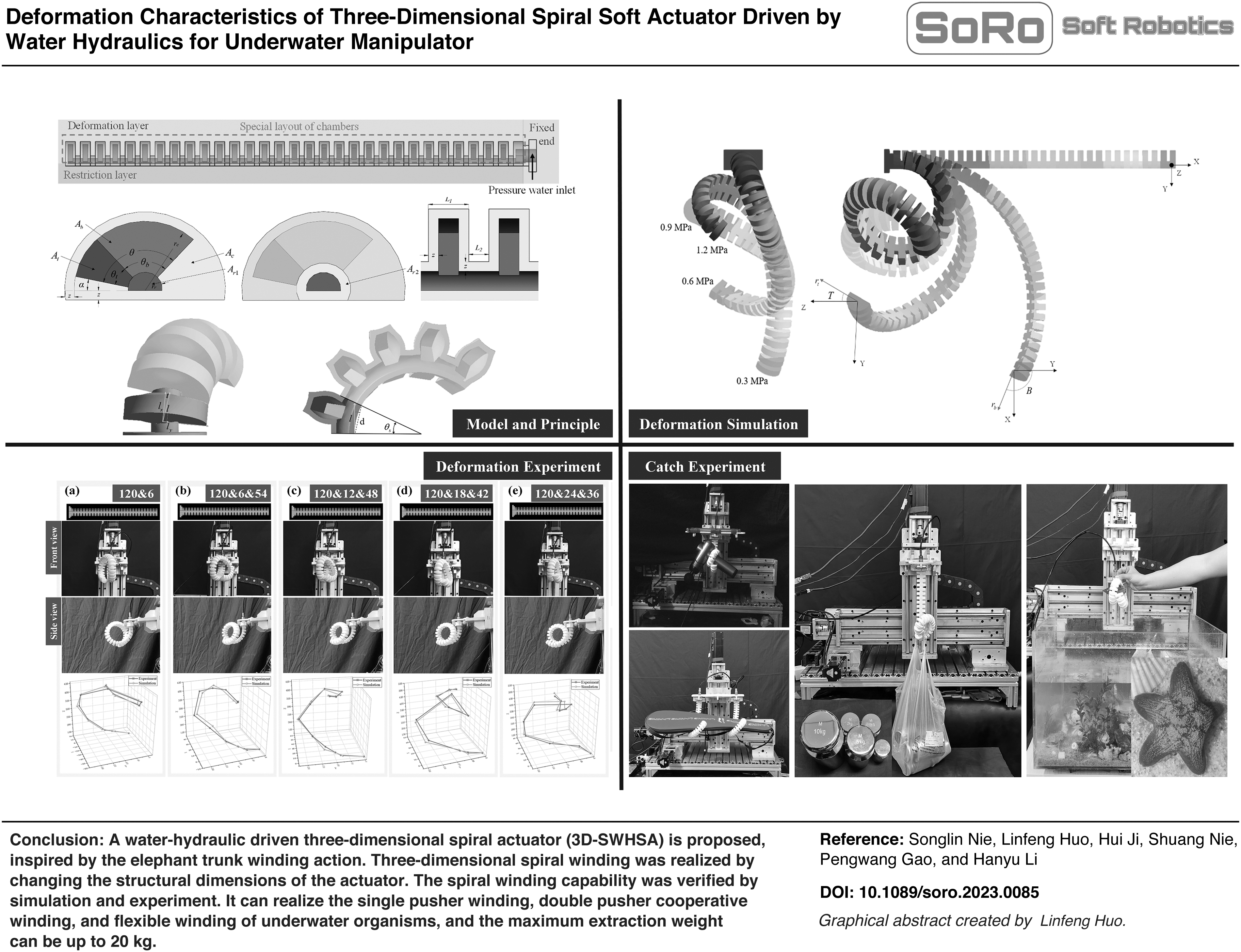
This article presents a 3D-SWHSA driven by water hydraulics with an elephant trunk as the bionic prototype, capable of achieving 3D spiral winding deformation under pressure and effectively capturing objects of various sizes and shapes.
The 3D-SWHSA was designed with multiple groups of BATUs to create a unique variation of the sector chamber structure. Different BATAs were produced with varying rounding angles and eccentric angles, and simulations and experiments were conducted to determine the bending and twisting characteristics of each BATU structure.
The BATU sector chamber structure with a 120° round center angle was chosen for the 3D-SWHSA, and the deformation ability of 3D-SWHSA with different deflection angles was tested. Although some actuators would interfere with each other during deformation under pressure (solving the interference problem will be the direction of later improvement), a 3D-SWHSA with the best deformation ability and no interference was selected for the subsequent experiments. To validate its flexibility, adaptability, and biocompatibility, successful catching experiments were conducted in both air and underwater environments. These experiments demonstrated that the 3D-SWHSA possesses a unique winding advantage when capturing elongated objects. At the same time, a lifting and catching method can be implemented for objects with handles.
In addition, the dual 3D-SWHSAs can achieve a more stable and adaptable winding effect. The single 3D-SWHSA has a maximum lifting capacity of 20 kg and exhibits excellent flexibility and gripping ability on irregular objects and aquatic organisms.
The proposed 3D-SWHSA exhibits excellent capabilities in imitating the curl deformation of an elephant trunk, using two catching methods, supporting heavy grasping weights and demonstrating underwater winding abilities. These features make it highly suitable for land-based environmental protection and deep-sea exploration work involving catching activities. This study confirms the great potential and wide-ranging prospects of the successfully developed 3D-SWHSA in fields such as underwater operations, fishing and sampling.
Conclusion
A 3D-SWHSA, inspired by the winding action of an elephant's trunk, is proposed to provide a more targeted soft actuator catching method. The 3D-SWHSA is composed of multiple BATUs, which can produce winding deformation after being pressed. Based on the Yeoh 3rd order model, a winding prediction model was established to study the bending and twisting characteristics of BATU with different structural parameters by means of finite element simulation. The bending and deformation ability of 3D-SWHSA was simulated by finite element simulation and verified experimentally. To validate its flexibility, adaptability, and biocompatibility, successful catching experiments were conducted in both air and underwater environments. Underwater organisms including organisms with soft appearance such as starfish and sea cucumbers, and organisms with hard shell such as sea snails and crabs, can also be caught harmlessly.
In cases where a single 3D-SWHSA is insufficient for capturing objects with unstable centers of gravity or when the capture range is exceeded, the double 3D-SWHSAs can be utilized for cooperative winding. This study affirms the great potential of 3D-SWHSA in diverse marine applications, including but not limited to marine geological exploration, marine life acquisition, and specialized marine operations, and that the ability to wind and deform with a single pressure input will greatly simplify mechanical systems and aid in ocean exploration.
Footnotes
Acknowledgment
The authors thank Mr. Yu Lan for his help in the experiment.
Authors' Contributions
S.N.: Conceptualization, methodology, and supervision. L.H.: Investigation, writing—original draft preparation, software, and data curation. H.J.: Investigation, writing—reviewing and editing, and supervision.
S.N.: Writing—reviewing and editing, visualization, and formal analysis. P.G.: Software and data curation. H.L.: Software and validation.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work is supported by the National Natural Science Foundation of China (Grant Nos. 51975010, 52075007, and 52005013); the Beijing Natural Science Foundation (Grant No. 3232006); the General Program of Science and Technology Development Project of Beijing Municipal Education Commission (Grant No. KM202110005031); and the Project of Cultivation for young top-notch Talents of Beijing Municipal Institutions (Grant No. BPHR202203023).
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.