
Abstract
Soft grippers have shown their ability to grasp fragile and irregularly shaped objects, but they often require external mechanisms for actuation, limiting their use in large-scale situations. Their limited capacity to handle loads and deformations also restricts their customized grasping capabilities. To address these issues, a model-based soft gripper with adaptable stiffness was proposed. The proposed actuator comprises a silicone chamber with separate units containing hydrogel spheres. These spheres exhibit temperature-triggered swelling and shrinking behaviors. In addition, variable stiffness strips embedded in the units are introduced as the stiffness variation method. The validated finite element method model was used as the model-based design approach to describe the hydrogel behaviors and explore the affected factors on the bending performance. The results demonstrate that the actuator can be programmed to respond in a desired way, and the stiffness variation method enhances bending stiffness significantly. Specifically, a direct correlation exists between the bending angle and hydrogel sphere layers, with a maximum of 128° achieved. In addition, incorporating gap configurations into the chamber membrane results in a maximum threefold increase in the bending angle. Besides, the membrane type minimally impacts the bending angle from 21.3° to 24.6°. In addition, the embedded variable stiffness strips substantially increase stiffness, resulting in a 30-fold rise in bending stiffness. In conclusion, the novel soft gripper actuator enables substantial bending and stiffness control through active actuation, showcasing the potential for enhancing soft gripper performance in complex and multiscale grasping scenarios.
Introduction
Conventional robotic grippers rely on simplistic rigid parts connected to intricate sensors and predetermined kinematic structures, which exhibit poor performance when attempting to grasp fragile, flexible, or irregularly shaped objects.1–3 In contrast to rigid robotic grippers, soft grippers possess superior mechanical traits and interaction capabilities due to their pliable structure and versatile actuators.4–6
Different types of actuators with various power mechanisms can drive soft grippers. Pneumatic actuators, which are widely studied, have a broad range of applications due to their user-friendly operation. 7 However, the pneumatic actuator's energy source requires additional vacuum pumps, leading to limitations in its structure and pressure compatibility, resulting in inadequate performance in complex situations. Moreover, for enhanced precision in motion controls and rapid responsiveness, electrical or magnetic charge actuators are also used.8,9 However, limited flexibility and insufficient propulsive capability constrain the practical use of electric or magnetic charge actuators. In addition, the chemical reaction-based actuators devoid of external components have been developed to attain active actuation.5,10 The limited power output of the chemical reaction actuator restricts the operational duration, thereby impeding the attainment of continuous grasping tasks.
To realize active actuation, the utilization of responsive materials that react autonomously to external stimuli offers potential for applications into soft gripper. 11 Functioning as an active smart material, hydrogel exhibits shape alteration in reaction to specific external triggers, including pH, temperature, light, electric, and magnetic fields. 12 The thermally responsive hydrogel has gained significant interest, owing to the facilitated adjustability and strong compatibility. 13 Thermally responsive hydrogel actuators utilize hydrogel volume alterations triggered by ambient temperature fluctuations, exhibiting targeted large deformations within specific temperature ranges. 14 Furthermore, given the adaptable critical temperature, this attribute proves valuable in applications such as self-folding bilayers, soft origami, and multilayer-based soft gripper.15–17 Despite their impressive flexibility, they must still be specially designed to achieve high performance.
Soft robotic grippers have grappled with issues of material robustness, limiting their effective application in reality.18,19 The grippers' tuneable or variable stiffness is often achieved using methods that include hydraulic pressure, 20 pneumatic particle jamming, 21 and layer jamming. 22 Nevertheless, incorporating extra pump stations or power equipment augments the intricacy and mass of the robotic system, posing challenges for achieving the compactness and high power density demanded by large scale applications. Incorporating diverse techniques and alternative embedded approaches for achieving adjustable stiffness in soft grippers are reported, including the fusible alloy (Ni-Cr wires) enabling stiffness modulation, 23 shape memory alloy with adaptable stiffness characteristics, 24 and magnetorheological fluids affording variable stiffness profiles. 25 Regarding embedded approaches, although intricate components are dispensable, external stimuli like temperature and magnetic fields remain essential.
Soft gripper actuator development often involves labor-intensive and inefficient experimental studies, using a trial-and-error approach. Alternatively, numerical simulations provide a more efficient and possibly superior complement to this process. The modeling of soft actuators presents challenges due to the strong nonlinearities and intricate geometries. 26 Finite element method (FEM), which is widely used in soft robotics modeling, offers an efficient approach for addressing nonlinearities and obviates the necessity for an explicit analytical framework. 27 FEM is effective in handling large deformations and material nonlinearities in deformation processes. Thus, FEM based models are suitable for predicting the performance and assessing both potential and constraints of the soft actuator designs under different inputs, reducing costs and development time.28,29
In addition, FEM is capable of addressing contact nonlinearities arising from surface interactions during deformation, leading to better understanding the interaction of local stress and strain on global shape change of the actuator. 30 However, the high deformability of soft actuator structures relies on the hyperelastic nonlinear material such as silicone elastomers. 31 Therefore, the constitutive material model used in simulations must be calibrated over practical strains relevant to the specific application.
This study introduces a novel soft gripper driven by active smart hydrogel actuator, enabling large deformations and variable stiffness. The contributions of the proposed study include several aspects.
First, the swelling and shrinking behaviors of the temperature-sensitive hydrogel spheres are utilized as the basic actuating principle to drive the gripper. Then, the gripper actuator is uniquely designed as a flexible structure made of silicone membrane with separate units filled with hydrogel spheres. Subsequently, an examination of the bending stiffness, which pertains to loading capacity, is conducted. A method for enhancing stiffness is then suggested to enhance the bending stiffness of the actuator. Furthermore, the model-based design methodology is developed based on the FEM approach to achieve the model based design.
Compared to current actuation methods, our design eliminates the need for additional equipment, and its triggering conditions are relatively easy to implement. Consequently, the proposed gripper benefits in scenarios requiring large-scale nonimmediate responses, such as the installation and stabilization of sizable objects in underwater or in surface vehicles, particularly in offshore engineering. In addition, in nonimmediate response situations, the proposed gripper can achieve actuation by environment temperature changes, minimizing the need for additional energy-consuming temperature control systems.
Actuator design
The gripper actuator, as illustrated in Figure 1, consists of a silicone structural body with discrete units as chambers. Each chamber contains a uniform temperature-sensitive hydrogel sphere. The designed actuator selects the poly (N-isopropylacrylamide) (PNIPAM) as the utilized hydrogel. When the temperature falls below the critical point, PNIPAM experiences one-way swelling behavior due to the absorption of water molecules, and when the temperature exceeds critical temperature (306K), PNIPAM shrinks as it releases water molecules.
32
The spherical design ensures symmetrical volume for water accommodation, while multiple chambers prevent unrestricted sphere movement. A strain-limit layer on the left side restricts left-layer extension, and the top layer serves as a fixed point to secure the gripper without structural deformation. The slope of the actuator is characterized as bending angle

The working principle of the hydrogel based design.
The Figure 1 also illustrates the working principle. It involves two states as follows: initial and actuated. In the initial state, inactive hydrogel spheres fill the chambers without any force. As temperature changes, the hydrogel spheres expand and interact with silicone chambers, causing the membrane to extend due to interaction forces. The strain-limit layer limits left-side elongation, causing bending. When the hydrogel spheres swell significantly, maximum bending occurs, transitioning to the actuated state.
In addition, the detailed structure design is shown in Figure 2. Each unit fills hydrogel sphere with the diameter of d. The total length of the structure is L. The thicknesses at the top and the bottom are t1, while the thicknesses of the outside membrane on both sides are t0. Different units are separated by the middle layer with the thickness of t2. The strain-limit layer is on the left of the thickness of t3.

The geometric parameters of the structure.
Furthermore, various structures are model designed to investigate the effects of geometric factors on the bending performance. The designs, derived from the initial straight design, feature gaps on the right side. The depth ds of each shape is same and set to 6.2 mm, while the difference between different designs is the width ts, which is 20, 6, and 2 mm for the clubbed, wavy, and prismatic configurations, respectively.
Methodology
Temperature-sensitive hydrogel model
The PNIPAM can be characterized using the Helmholtz free energy model,
32
where Ws arises from the elongation of the polymer network, while Wm represents the energy associated with the mixing of the polymers and the solvent. The free energy arising from the elongation of a polymer network is considered as,
33
The energy of mixing of the extended polymer with the solvent is considered as, 34

where N represents the count of polymer chains per unit dry volume, kT denotes temperature expressed in energetic units,
where
The values A0, B0, A1, and B1 of PNIPAM hydrogel are given by experiments as
where
Furthermore, the chemical potential denoted as μ constitutes another important material property parameter utilized for characterizing the hyperelastic behavior of hydrogels within numerical models, necessitating its constancy within a state of equilibrium. Hence, the free energy function can be alternatively formulated using a Legendre transform,
37
The constraint relationship between
Then the volume ratio J is induced to donate the third deformation gradient tensor. Thus the free energy function can be obtained using the Equations (1)–(3) and Equation (8),

where
PNIPAM hydrogel is investigated through the FEM approach capable to capture the responsive behavior, along with the implementation of user-defined codes. 39
In the case where
For the free swelling, the swelling ratio in different directions has the relation as,
Thus, the equilibrium state can be articulated as follows,
Relative to the dry network, the condition of free swelling can be delineated through the deformation gradient,
Let
Using the free swelling state as the reference state, the nominal free energy density is expressed as,
the Equation (15) constitutes the fundamental basis function of FEM simulations.
In addition, the covered silicone membrane exhibits characteristics of hyperelasticity, thereby manifesting a stress-strain correlation of nonlinear behavior. To describe this particular stress-strain relationship, the finite element solver incorporates the Neo-Hookean constitutive model, thus facilitating the delineation of the material attributes.
41
The strain energy density function for an incompressible material is as,
where
Simulation setup
In this study, the ABAQUS commercial finite element software is used, and a user-defined UHYPER subroutine is developed for modeling the PNIPAM hydrogel (The program code is shown in the Supplementary Data). Before integration into the all-polymer structure, the hydrogel was assumed to be existing in a homogeneous free swelling state after synthesis. The equilibrium state is characterized by
Parameters of Different Materials
The hydrogel and silicone membrane exhibit characteristics of soft materials, displaying minimal disparity in relative hardness. Consequently, the hard contact model is adopted for the contacting interface, aiming to minimize the penetration of the slave surface into the master surface at the constraint locations, while concurrently restricting the transfer of tensile stress across the interface. Besides, the friction formulation utilizes an isotropic coefficient of 0.01 to describe tangential characteristics. The mesh is specified individually for each part. The hydrogel balls use a standard 3D C3D8H (eight-node linear brick, hybrid with constant pressure) mesh. However, the 3D C3D4H (four-node linear tetrahedron, hybrid with constant pressure) mesh was chosen for membrane structures to improve mesh quality and convergence by addressing the existence of thinner and irregular edges. Furthermore, grid independence verification establishes the global mesh sizes for hydrogel balls and membrane structures at ∼1 and 1.5, respectively. Moreover, in formulating the design concept, emphasis was placed exclusively on the bending performance actuated by hydrogel balls, with the gravitational impact being disregarded. The temperature is used as triggering conditions; alterations in temperature serve as the triggering condition, ranging from 308K down to 290K. 42
Results and Discussion
Validation of the numerical results
To substantiate the numerical model of the swelling process, a comparative analysis is conducted between the simulation results of the swelling ratio (

Furthermore, to validate the bending performance of the proposed actuator gripper, a comparative analysis of the bending performances between the numerical model and experiments has been conducted. In the conducted experiments, chamber and hydrogel balls are produced through mold casting, with 3D-printed molds using polylactic acid filament. The chamber membrane is constructed from Ecoflex-30 silicone, and the balls are made of PNIPAM based hydrogels. Furthermore, in the experiments, the full bending and recovery process took 9 h, including around 8 h of the bending and 30 min of the recovery cycle. The bending angle is measured by the displacements of the free end of the gripper. (More experiments details are shown in Supplementary Data) To align with experimental conditions, a simulation is performed with
Figure 4 illustrates the comparison with error bars indicating measurement discrepancies in three experimental trials, and the maximum error attains a magnitude of 8%. Generally, both the experiment and numerical case show that the
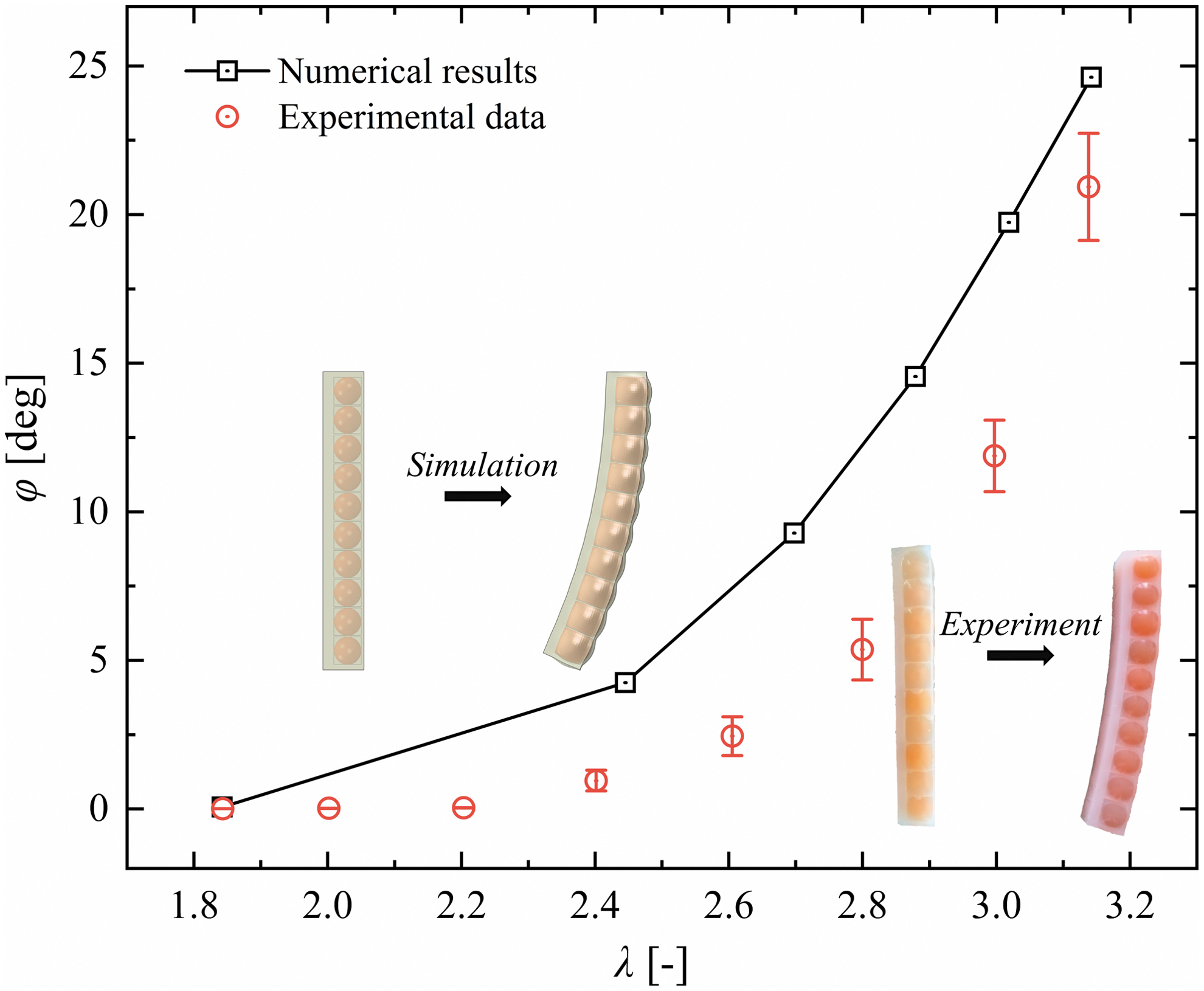
Comparison of the simulated and experimental results of the bending angle (
Sensitivity analysis of different factors
Various key factors, such as the number of hydrogel spheres, structure configurations, and membrane materials, are chosen to study their impact on bending performance. Specifically, each hydrogel sphere occupies one individual unit in one layer, thus the hydrogel sphere layers can represent the number of hydrogel spheres. Hydrogel sphere layers represent the sphere count, ranging from 10 to 50 layers. Different structural configurations (straight, wavy, prismatic, and clubbed) are explored, and material details are shown in Table 1. Besides,
The result of the bending angle of different hydrogel sphere layers is shown in Figure 5a. Generally, more hydrogel layers result in a higher bending angle, indicating a consistent interaction force between the membrane and swelling hydrogel. Specifically, the

Bending performance of different influential parameters:
Figure 5b illustrates how bending angles change with varying structural configurations due to swelling ratio. Generally, as the swelling ratio increases, the bending angles of different structures also increase, and this increase occurs gradually. This overall pattern suggests a consistent trend between bending angles and swelling ratio across various structural configurations.
Specifically, the clubbed configuration attains a maximum
Figure 5c illustrates how the Neo-Hookean coefficient
Bending stiffness evaluation and variation
The bending stiffness in this study refers to the capacity of the entire structure to resist the external force while maintaining its form without undergoing deformation. The bending stiffness can be expressed as follows,
45
where

Illustration of the calculation of the bending stiffness.
The variation in bending stiffness across different structural configurations and membrane materials being altered by the bending angle is illustrated in Figure 7. Figure 7a displays the

The variation in bending stiffness:
The membrane materials chosen from Table 1 determine bending stiffness, as shown in Figure 7b. Bending stiffness generally increases with higher
The coefficient of determination (R 2 ), 46 denoted as 0.99973, indicates a substantial level of consistency between the regression forecast and the actual value. This polynomial model can evaluate bending stiffness across various membrane materials.
Specifically,
Stiffness enhanced method
While the hydrogel-based smart actuator gripper achieves significant flexibility and a wide range of motion, it faces a limitation in bending stiffness. Increasing load-bearing capacity for diverse grasping tasks involves introducing a low melting point alloy (LMPA) mechanism to enhance bending stiffness.47,48 LMPA exhibits a liquid state above its transition temperature and solidifies below this threshold. In this study, gallium-based LMPA with a transition temperature of 303K was integrated into the soft actuator as variable stiffness strips to achieve tuneable stiffness variation.
As shown in Figure 8, three variable stiffness strips are inserted in the strain-limit layer of the size of 8 mm in x direction, 6 mm in y direction, and 213 mm in z direction. In the modeling process, the principle of LMPA was applied, and several assumptions were used to represent the LMPA behavior in the simulation. The liquid state of LMPA was represented by a low elastic modulus of 0.08 MPa to denote deformability. Furthermore, the variable stiffness strips undergo plastic deformation during the actuator's bending. As the actuator bends to its extreme position, adopting a temperature-based condition increases the strips' elastic modulus to 9800 MPa, demonstrating the solid state, which results in the entire actuator maintaining a fixed shape with significantly enhanced bending stiffness. In addition, the simulation results lay foundation for LMPA development with parameters that can be used in an actuator configuration for tailoring stiffness. This will increase the load bearing capacity.

Illustration of the stiffness enhanced method.
Figure 9 depicts increased bending stiffness with variable stiffness strips in various structures and membrane materials. In Figure 9a, compared to the original design, the use of these strips boosts bending stiffness by up to 30 times, demonstrating their effectiveness. Notably, the bending stiffness with variable stiffness strips rises from a straight to a clubbed configuration, contrary to the original design. Illustrated in Figure 9b, when comparing with the original designs without variable stiffness strips, the incorporation of variable stiffness strips yields a maximum 20-fold improvement in bending stiffness across various membrane materials.

The results of the enhanced bending stiffness:
To further evaluate the effects of the stiffness enhanced method, a comprehensive comparison to other variable stiffness actuators is introduced, including proposed wavy actuator, particle-based actuator, 19 particle jamming actuator, 49 and fiber-reinforced actuator. 50 Figure 10 displays the bending stiffness of different actuators at various bending angles. The proposed actuator significantly outperforms others, with 1.15 times greater stiffness than the particle-based actuator, 1.22 times greater than the particle jamming actuator, and 1.28 times greater than the fiber-reinforced actuator when fully actuated.

Conclusion
In this study, we introduced an innovative active soft gripper actuator using smart hydrogel to achieve significant deformation and stiffness variation. This actuator consists of individual flexible units filled with temperature-sensitive hydrogel spheres, with added strain-limiting layers and variable stiffness strips for stiffness enhancement. We used numerical modeling to assess how different factors affect bending performance and stiffness in various conditions.
The simulation results for hydrogel swelling closely match experimental data, confirming the accuracy of the numerical model. We found that the bending angle depends on hydrogel layer count, structure, and membrane material. More layers result in a greater bending angle, with clubbed structures showing the highest angle. Increased membrane stiffness initially raises the bending angle but then decreases it. Therefore, model-based design offers an efficient method to investigate how various factors impact bending performance, making it suitable for specific design purposes or applications. Bending stiffness grows as the angle increases, but structures with gaps reduce stiffness, while rigidly covered membranes enhance it. Implementing variable stiffness strips significantly boosts bending stiffness, achieving a 30-fold increase at most, demonstrating a relative improvement compared to other enhanced actuators.
However, due to constraints imposed by the material properties of hydrogel, the actuation time of the proposed gripper is long. Our future work includes collaboration with material scientist to overcome this by novel actuator configurations to decrease the time. In addition, the proposed gripper under consideration exhibits primarily a one-directional mode. Therefore, in the future, enhancements to the gripper's structure and the integration of alternative actuation methods will be pursued to optimize response time. The future development of a soft gripper aims to achieve precise grasping capabilities for specific tasks. Moreover, the proposed actuator will be integrated with various smart materials. The multifunctional components will be formulated utilizing modular concepts from multiple smart materials, enabling the attainment of customized deformations and enhanced grasping capabilities.
Footnotes
Acknowledgment
The financial contributions are gratefully acknowledged.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work is supported by the National Natural Science Foundation of China grant number 52071240, the Higher Education Discipline Innovation Project grant number BP0820028, and China Scholarship Council grant number 202006950011.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.