
Abstract
Origami robots have garnered attention due to their versatile deformation and potential applications, particularly for medical applications. In this article, we propose a Yoshimura continuum manipulator (YoMo) that can achieve accurate control of the tip position for the magnetic resonance (MR) environment. The YoMo made of a single piece of paper is cable-actuated to generate the bending and shortening deformation. The paper-based YoMo attached to an arc frame can readily function under different orientations in the MR environment. The design and fabrication of YoMo were formulated according to the Yoshimura folding pattern. The kinematics model based on constant curvature assumption was derived as a benchmark method to predict the tip position of the YoMo. The Koopman operator theory was applied to describe the relationship between the tip position and the length change under different orientations. The linear quadratic regulator integrated into the Koopman-based model (K-LQR) was adopted to achieve the trajectory tracking. Comprehensive experiments were carried out to examine the proposed YoMo, its modeling and control methods. The performance of the YoMo including stiffness and workspace was characterized via a customized test setup. The Koopman-based method demonstrates the superiority over the constant curvature-based model to predict the tip position. The K-LQR control method was examined with different trajectories, and the impact of the orientation, speed, and different trajectories were taken into consideration. The results demonstrate the YoMo is capable of achieving trajectory tracking with satisfied accuracy, indicating its potential for medical applications in the MR environment.
Introduction
Origami robots have garnered attention from the robotics community. 1 Researchers have tapped into this traditional art of paper folding for a wide range of applications ranging from space robotics to medical devices.2,3 These applications are mainly attributed to its rich folding techniques, well-defined crease patterns, and inherent compliance. However, its application of origami-based robots for MR environment has not been studied yet.
MRI-safe robots are designed to manipulate the tools safely in the magnetic field of an MRI (Magnetic Resonance Imaging) machine. These robots have been developed over decades, which are mainly based on the traditional rigid robots. These robots were devised to assist with procedures such as laser ablation and needle insertion, which are commonly used in the treatment of liver, lung, kidney, and prostate cancer.4,5 The MR environment and clinical procedures pose challenges to the system design, material selection, and actuation methods of surgical robots. The pioneering work dates back to 1995, when polyethylene terephthalate and piezoelectric ultrasonic motors were applied to develop the robot for stereotactic neurosurgery. 6 The pneumatic cylinders were adopted to achieve the needle placement in the prostate for biopsy and brachytherapy procedures. 7 The remote center of motion mechanism driven by piezoelectric ultrasonic motors was also investigated for diagnostic or therapeutic neurosurgical interventions. 8 Another endeavor was a neurosurgical continuum robot comprising the shape memory alloy spring actuator and tendon-sheath mechanism for brain tumors.9,10 Recently, a soft robotic manipulator driven by hydraulics was proposed to control the laser beam projection for tumor ablation in the oral and pharyngeal cavities. 11 Origami robots possess inherent compliance, adaptability, and MR-safe ability, promising to offer an alternative way to manipulate the tools in the MR environment.
The folding patterns, or crease patterns, have inspired a slew of autonomous machines, whose morphologies and functions are created by folding. The three-dimensional structures made from the Kresling pattern exhibited torsional and axial deformations when actuated. Pagano et al. investigated the kinematics of the Kresling structure and showcased a paper-made prototype to mimic a crawling location driven by Drect Current (DC) motors. 12 A magnetically actuated crawling robot using the Kresling pattern was developed potentially for drug storage and release. 13 Kresling-inspired soft twisting robots were made from silicon and pneumatically actuated, demonstrating their capabilities such as object manipulation and locomotion.14,15 Another well-examined folding pattern is the waterbomb structure. The kinematics of the waterbomb were thoroughly investigated, paving the way for its application such as flat roofs and solar panels. 16 A soft gripper inspired by the waterbomb was developed and was driven by a vacuum to grasp different objects. 17 Apart from these two well-known folding patterns, the Yoshimura pattern also exhibits excellent axial and bending deformability, but the potential of the Yoshimura pattern in medical applications has not been exploited.
The aforementioned origami robots exhibit compliant and continuum deformations, which are similar to the continuum and soft robots. The wide applications of continuum and soft robots in clinical trials not only indicate the potential of the origami robot but also offer techniques to model and control the paper-folding machines.18,19 The mathematical modeling of continuum robots has been extensively investigated using the mechanics and kinematics frameworks, such as the constant curvature, variable curvature, and elasticity theory. 20 The existing continuum robots were fixed at the base, resulting in a constrained workspace and limited configurations. However, the continuum robots can take advantage of the MRI bore to alter its base and deliver suitable positions and angles for the specific procedures. In this way, the impact of gravity and unmodeled factors induced by the orientation of the base should be taken into consideration of the modeling. On the contrary, the mechanical structure and modeling uncertainties largely have not been taken into consideration of the model-based control scheme. 21 However, data-driven approaches have been exploited to overcome these challenges, approximating the kinematics and dynamics of the robots with different types of neural networks.22,23 Despite these efforts, the strong nonlinearity and the lack of interpretability of these data-driven methods limit the applications in closed-loop control.
In this paper, we propose the design, modeling, and control of a Yoshimura continuum manipulator (YoMo). YoMo attached to an arc frame can function under different orientations in the MR environment (Fig. 1). Unlike other medical continuum robots, the YoMo is made of a single piece of paper, which easily meets the MRI compatibility requirement. The attachment to the arch frame not only allows YoMo to operate in the MRI bore but also offers more workspace due to different orientations. The design and fabrication of YoMo were formulated, and then the performance of YoMo with different geometry parameters was examined in terms of mechanical properties. The kinematic model of YoMo is formulated to capture the relationship between the length change and tip position based on the constant curvature assumption. The dynamic model of the Yoshimura continuum manipulator is formulated based on the Koopman operator theory, which offers a linear relationship between the tip position, orientation, and length change. The Koopman-based model integrated with the linear quadratic regulator (K-LQR) was adopted to control the tip position to track prescribed trajectories. The results demonstrate that the YoMo can achieve trajectory tracking with satisfied accuracy, indicating its potential for medical application in the MR environment.

The design of the Yoshimura continuum manipulator.
The key contribution of this paper is a novel manipulator based on the Yoshimura folding pattern that demonstrates the potential for the medical procedures such as biopsy and laser ablation in the MR environment. Different from the existing origami robot, the simple and elegant structure of the Yoshimura folding pattern is exploited to advance robotics design and fabrication methodologies. To the best of authors’ knowledge, it is the first attempt to introduce origami robot into the field of MRI-safe medical robot. The traditional cable-driven manipulators are designed mainly by intuition and made of elastomer or backbone structure, which complicated the design improvement and hampered their advancement.24–26 In contrast, the Yoshimura patterns can be easily adjusted to different sizes, materials, and configurations. Unlike traditional manipulators, the nonmetallic, foldable nature of the paper facilitates easy integration into the MR environment. Furthermore, the variations of the orientation are introduced into the design and modeling, offering more workspace and overcoming the impact of gravity and modeling uncertainties. Besides, the Koopman operator theory was adopted to offer an interpretable and linear model, which is readily available to integrate with linear control methods.
The rest of this paper is organized as follows. Section 2 describes the design and fabrication. Section 3 presents the modeling and control method of the actuator. The experiments and results are discussed in Section 4. Section 5 gives a conclusion.
Design and Fabrication
Overview of the YoMo
The strong magnetic environment and constrained MRI bore pose great challenges to the system design and material selection of the robots. The conceptualization design of the YoMo is presented in Figure 1a. Such a manipulator is designed to manipulate surgical tools, such as the needle for biopsy and the laser for ablation procedures inside the MRI bore. The dimensions and material selections meet the MRI compatibility requirements. Patient coils were not taken into consideration because the accurate movement of the manipulator is focused at this stage. Figure 1b shows the close-up view of the YoMo. The YoMo is a hexagonal tube with an accordion-like surface actuated by three cables. The deformation of YoMo is achieved by coordinating the lengths of three cables. One end of the cable is connected to the tip of YoMo, and the other end is connected to the servo motor. The arch frame with mounting holes enables YoMo to be operated at different orientation angles. The mock needle is attached to the tip of YoMo, demonstrating the applications such as needle insertion and laser ablation. Figure 1c shows the front view of the robot that the YoMo is attached to the arch frame. One coordinate system is labeled at the center of the arch frame, indicating the locations of the mounting holes at different angles
Design and fabrication of the YoMo
The design and fabrication of the YoMo are shown in Figure 2. It largely extends our previous work by formalizing the Yoshimura pattern and fabrication process.
27
There are three layers of the Yoshimura pattern as demonstrated in Figure 2a, with the middle layer consisting of blue, pink, and yellow squares. The pattern is composed of an array of triangular units enclosed with mountain lines and valley lines, such as the light blue triangle

Design and fabrication of the YoMo.
Figure 2c shows the folding procedure of the YoMo, demonstrating the transformation of the Yoshimura pattern from the two dimensions to the three-dimensional structure. Although the folding lines were printed on paper as a guide, it is hard to fold alone the lines perfectly. Therefore, the dashed folding line was engraved using the laser cutting machine, which avoids the inconsistency introduced by manual folding. The red strip on the right edge was the double tape for binding the two edges of the paper. After the folding, the Yoshimura creases were generated on the paper corresponding to the prescribed mountain and valley lines. Then, the paper was wrapped according to the creases, forming the Yoshimura cylinder. Finally, the double tape was used to connect the two edges of the paper, resulting in the regular hexagonal tube. The acrylic boards of the same size as the hexagon were attached to the top and bottom of the paper tube, facilitating the subsequent installment of the YoMo on the arch frame. Figure 2d shows the functionality of the origami actuator that can achieve the shortening, elongation, and bending movement. The cables are through perforations on the paper to connect to the tip of YoMo, and the other end of the cable are connected to the motor. The three alternate vertices are selected to tie with the end of three cables, respectively. It is adequate to actuate YoMo, generating the shortening and bending motion. The elasticity of the cables is negligible due to the small length changes of the cables. The key parameters of the Yoshimura actuators are summarized in Table 1. For medical applications, biocompatible materials such as medical-grade silicone (e.g., MED-4735 from NuSil Brand) or biodegradable polymers (e.g., polylactic acid and polycaprolactone) can be used to fabricate the manipulator. Although origami patterns can also be applied to sheets made of silicone or polymer, the thickness and hardness of these materials will introduce challenges in folding. Pre-made creases could be adopted and formed by variable thickness, where the folding lines are made thinner than the rest materials, or could be designed with layered structures to tune the stiffness, or manufactured by laser cutting method.
Key Parameters of the YoMo
Modeling and Control of the YoMo
The YoMo is developed to manipulate the clinical tools, such as needle and laser, which will be attached to the YoMo tip. The modeling and control of the YoMo are investigated in this section. The kinematics was analyzed based on the constant curvature assumption as a baseline of the modeling methods. This kinematics modeling describes the relationship between the cable lengths and the tip position. The dynamics of YoMo is formulated based on the Koopman operator theory, taking the tip position, length change, and orientation into consideration. The Koopman-based model is integrated with the linear quadratic regulator, forming the closed-loop control scheme for the YoMo.
Constant curvature-based modeling
The kinematics of the YoMo model was formulated to describe the tip position of the YoMo based on the constant curvature assumption. This description is extended from our previous work on the single actuator.
27
Figure 3a demonstrates the schematics of the YoMo, indicating the YoMo (red solid line) is attached to the arch frame (blue dashed line). There are three coordinate systems, which are placed at the center of the arch frame, the base and the tip of the YoMo, {O}, {Ob}, {Ot}, respectively. The orientation angle

The schematics of the Yoshimura continuum manipulator.
The hexagonal YoMo is actuated by three cables, which are connected to the alternative vertices of its top and bottom (Fig. 3b). The three cables are labeled as
The kinematic modeling of the YoMo is grouped into three spaces to describe the relationship between the cable lengths, arc parameters, and the tip position (Fig. 3c). The configuration space
On the other contrary, the arc parameters are directly associated with the cable lengths as below
According to the constant curvature assumption, the inverse kinematics
Therefore, the constant curvature-based model (CC model) is derived that establishes a relationship between the cable lengths and the tip position, which is also essential for the calculation of the workspace and the effective implementation of motion control for the YoMo.
Koopman-based model
The kinematic model of the YoMo is developed based on the Koopman operator theory. Koopman method offers a way to represent the nonlinear system in a linear, infinite-dimensional form. The nonlinear system of the manipulator with control input is described in the following form
The first step to realizing the Koopman-based model is to collect the dataset that includes the system state
The Koopman operator is an infinite-dimensional matrix to describe the nonlinear system, which is impossible to apply in practice. The extended dynamic mode decomposition (EDMD) algorithm provides a way to identify a finite-dimensional linear approximation of the Koopman operator. To achieve the linear approximation, a vector of observables is prescribed as a lifting function in the form of
Each observable
To summarize, the discrete linear model of the controlled system identified by the Koopman operator is formulated as below
The system state
EDMD uses least-squares minimization methods to approximate the Koopman operator. In this way, EDMD constructs a finite-dimensional linear system model from the collected dataset. The Koopman operator is computed by minimizing the sum of squared residuals over the parameters of
The least squares minimization (8) is solved using the normal equation. The normal equation is written as
Control scheme
A control scheme was applied to the YoMo to obtain proper control inputs for accurate trajectory tracking. The movement of the YoMo is affected by nonlinear factors, such as the gravity under different orientations, the friction between cables and the YoMo, and the slackness of cables. We combined the Koopman-based model with K-LQR to realize the optimal control scheme. K-LQR was chosen for its compatibility with the Koopman operator framework, which allows the use of linear control techniques on a linear approximation of the nonlinear system. K-LQR’s advantages include computational efficiency and robustness to model uncertainties. However, its limitation is the heavy reliance on the accuracy of the Koopman operator approximation.
The closed-loop control scheme based on the K-LQR controller was developed to track the prescribed trajectory (Fig. 4). The trajectories of the manipulator tip with the respect to the base coordinate system

The control scheme of the Yoshimura continuum manipulator based on the proposed K-LQR controller.
K-LQR is applied to the proposed YoMo system, which has been described in the linear form of (8) by the Koopman operator. The LQ optimization problem can be represented as a cost function
The control law of the feedback form is
Experiments and Results
The comprehensive experiments were conducted to characterize the actuator and examine the modeling and control methods. First, the performance of YoMo was characterized. Second, the modeling of the Yoshimura continuum robot based on the constant curvature assumption and the Koopman operator theory were evaluated. Third, the control methods were applied to achieve accurate trajectory tracking.
Characterization of YoMo
The stiffness, bending range, and workspace are three key properties of YoMo’s performance, and these properties are associated with the dimensions and grammage. To characterize these properties, experiments were conducted with customized setups. The impact of the grammage and edge length on the stiffness was examined. The YoMo was shortened and elongated within the prescribed displacement from 0 to 60 mm on a test setup, and a force sensor (SBT630, the range is 0–20N, the resolution is 0.1N) was used to measure the axial force. The YoMo with different grammage was also examined by measuring the displacement and corresponding force change (Fig. 5a). The impact of higher grammage on the YoMo is evident as it enhances stiffness, enabling the delivery of increased force under same length changes. A set of edge lengths were selected to compare their impact on the stiffness. As the edge length is reduced, the YoMo exhibits higher force under the same length, indicating an increase in stiffness with shorter edge lengths (Fig. 5b). According to the results, the grammage of 230 g/m2 and the edge length of 20 mm are selected due to the good performance for the following experiments. In terms of repeatability, the YoMo underwent one thousand cycles of shortening and elongation within 2 h. Although the actuators remained functional, Figure 5c reveals a noticeable decrease in axial stiffness. This suggests that the origami robot is suited for disposable applications.

Characterization of the Yoshimura continuum actuator.
Apart from the axial deformation tests, the bending performance was also examined. The YoMo was placed on the test setup and actuated by the change of the cable length. The relationship between the bending angle and the cable length change was also characterized. Figure 5d presents a linear relationship between the bending angle and the cable length change. The bending deformation could achieve a bending angle
Experiments of YoMo
A test setup was developed to validate the accuracy of the modeling and control methods (Fig. 6). The YoMo was driven by three motor modules (Dynamixel MX-64T motor, 4096 pulse/rev, and 6.0 N·M stall torque). The motion capture system (Vantage V16; Vicon Industries, Inc.) was applied to record the tip position with respect to the base of the YoMo at the frequency of 100 Hz, where the reflective markers were attached. The corresponding length changes were also recorded by the encoder in the motor. The basement of YoMo was manually fixed to the prescribed mounting holes, forming the corresponding orientation angle. A laptop computer (AMD Ryzen 7 5800H 3.20 GHz 16.00GB) processes the collected dataset and delivers the control signals at the frequency of 20 Hz with MATLAB scripts.
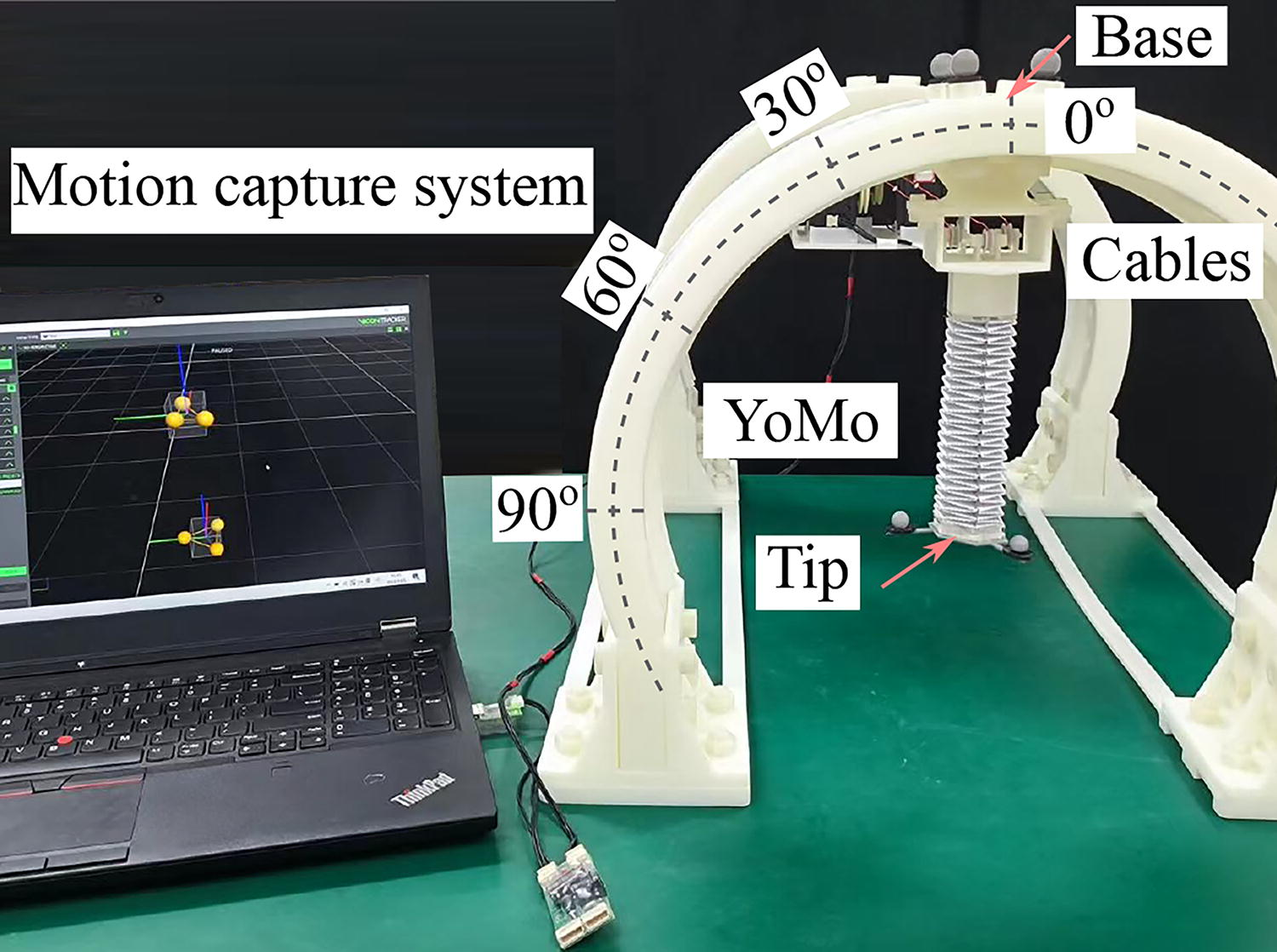
Test setup of the Yoshimura continuum manipulator.
Root mean square error (RMSE) is a statistical measure used to assess the accuracy of proposed modeling methods and to evaluate the performance of the modeling and the control method. The RMSE is calculated as
Data acquisition and evaluation of the Koopman-based model
The training dataset of the YoMo that consists of the system state
The tip positions at the three orientations predicted by the Koopman-based model and CC model were compared with the validation set of measured data (Fig. 7a). The error between the prediction value and measured data is also illustrated in Figure 7b. The prediction by the Koopman-based model (red dashed line) shows better agreement with the measured data (black line) compared with the CC model (blue dotted line) at the three orientations of

Evaluation of the Koopman model. The tip positions predicted by the Koopman-based model (red) are compared with the measured data (black).
Evaluation of the control method
The proposed K-LQR control methods were evaluated to track prescribed trajectories at the different orientations. Figure 8a demonstrates the schematics of the YoMo attached to the arch frame with the orientation angle

Evaluation of the control method.
The control performance of K-LQR is evaluated by comparing trajectories under the open-loop and closed-loop control. The open-loop trajectory is generated by inverse operations of the Koopman-based model, which has been identified in form of eq. (6). The closed-loop control is carried out based on the proposed K-LQR. Supplementary Video S1 demonstrated the circular trajectory generated by the K-LQR and projected onto the flat surface by a laser module. The tip trajectories under open-loop and closed-loop in four orientations on the X-Y plane are compared with the reference (Fig. 8c). It is evident that RMSE between the open-loop trajectories (cyan line) and reference trajectories (black dashed line) are increasing from 5.14 mm to 9.81 mm as the orientation angle adjusted from
The speed of movement also has an impact on the tracking performance. Therefore, the tracking performance with the different periods of the spiral trajectory (T = 5, 10, and 20 s, respectively) was examined (Fig. 9). It simulates the procedure of the laser ablation to circle around a specific position over a period of time. For simplicity, the results under the orientation of 0° were compared. The result shows trajectories (red line) under the K-LQR control method achieved better agreement with the reference spiral trajectory (black dashed line) compared with the trajectories (cyan dotted line) under the open-loop method as the period of trajectory increases. It is noticed that there is a discrepancy between the endpoints of these trajectories as labeled square, diamond, and star signs. This discrepancy is attributed to the inherent compliance of the system, which fails to respond to the control input effectively. Figure 9b shows when the period increased from 5 to 20 s, the tracking error of the K-LQR method decreased from 6.55 mm to 3.06 mm. Although the manipulator can achieve satisfactory accuracy under the proper speed of movement, the increased stiffness or other adaptive control methods could be the potential methods to realize a fast and efficient movement. Supplementary Video S2 demonstrated the results generated by K-LQR.

Results of tracking spiral trajectory with different periods at the orientation angle of
The application of the YoMo was evaluated in further trajectory tracking experiments with the developed control method (K-LQR). Three different trajectories with period T = 20 s were used in the evaluation, that is, infinite shape, rectangular shape, and flower shape. The selection of these shapes was intended to examine the control method over different geometries, such as curved paths, straight lines, and right angles. The results in different orientations are illustrated with the RMSE labeled (Fig. 10). Despite the variations of the orientation, the manipulator achieved trajectory tracking with the RMSE less than 3.59 mm. Each test was repeated three times, and the maximum standard deviation of these tests under different orientations was 0.68 mm, demonstrating the repeatability of the K-LQR method. In the experiment to track the infinite shape, the discrepancy occurs at the two sides, indicating the manipulator fails to follow the sharp turn due to its inherent compliance. For the rectangular shape tracking (the second row of Fig. 10), the variations of the orientations lead in the slight change from 2.80 mm to 3.59 mm, indicating the K-LQR control method capable of achieving trajectory tracking with high accuracy. The RMSE of flower-shaped trajectory tracking is below 1.96 mm. This high accuracy is mainly attributed to the fact that the prescribed trajectory is near the center area with smaller size and with the proper speed of tip movement. The results of these three patterns of trajectories in different orientations show satisfactory accuracy (RMSE <4 mm), indicating that the proposed YoMo can achieve trajectory tracking with accuracy based on the K-LQR control method.

Results of tracking the infinite shape, rectangular shape, and flower-shaped trajectories in different orientations. Solid lines represent the average trajectories, and the shades indicate the standard deviations.
Conclusion
We propose the YoMo that can achieve accurate trajectory tracking under different orientations for the MR environment. Yoshimura folding pattern were introduced to the design and fabricate the YoMo. The relationship between the tip position and cable length were modeled using constant curvature assumption and Koopman operator theory. Compared with the constant curvature-based model, the Koopman-based model proved to be more accurate in the prediction of the tip position. Particularly, K-LQR control method were validated to track the prescribed trajectories under different orientations with satisfied accuracy, indicating its potential for medical application in the MR environment. However, there are some limitations. Although the manipulator could handle lightweight devices such as needles, it is insufficient to manipulate the ultrasound probe. Additional payload increases the manipulator’s inertia, causes more deformation, requires higher actuation forces, and eventually affects the control accuracy. The clinical tools or equivalent payloads will be added to simulate the scenarios. The advanced data-driven adaptive control method will be investigated to achieve control accuracy while manipulating clinical tools. The compliance of the paper also limits the payload capacity. We will extend the proposed origami design and fabrication method to other materials with higher stiffness.
Footnotes
Authors’ Contributions
Y.D., J.Z., J.C., T.J., and J.H. designed the research; J.Z. and J.C. performed the experiments; J.Z. and Y.D. analyzed the data, and Y.D., J.Z., T.J., and J.H. wrote the article.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This research was supported by the National Key R&D Program of China (2022YFB4703500), the National Natural Science Foundation of China (Grant No. 62203234), and the Natural Science Foundation of Tianjin (Grant No. 23JCQNJC01360).
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.