
Abstract
This article presents a unique soft robot comprised of highly compliant locomotive modules interconnected with jamming-capable flexible envelopes. The modules incorporate origami-inspired actuators and suction cups for robust omnidirectional locomotion, acting as collective elements that drive the system’s movement and control. The flexible envelopes enable dynamic interactions with the environment through stiffness modulation via granular jamming. A unified pneumatic actuation system consolidates all robot functions, simplifying the mechanical architecture. The system’s capabilities are demonstrated through shape formation, object grasping and transportation, obstacle navigation, and diverse terrain locomotion experiments, highlighting its adaptability and cooperative nature. Furthermore, a simulation-based design optimization approach using a genetic algorithm enhances the system’s grasping performance by exploring the different module and envelope configurations. The interconnected soft robot system represents a unique fusion of highly compliant modules and bodies, advancing modular soft robotics for effective environmental interactions.
Introduction
This article introduces a unique interconnected soft robot system of elastic modules and jamming-capable flexible envelopes (Fig. 1a). The design links mobile modules with flexible envelopes, allowing cooperative tasks such as object grasping. Locomotive modules enable coordinated movement and control, whereas the envelopes modulate stiffness for better environmental interaction, all actuated pneumatically. Furthermore, task-oriented design optimization enhances the system’s grasping capabilities.

The overview of
Soft robots may offer several advantages over rigid ones, the ability to change shape for various tasks, safer environmental interactions, and reduced need for precise control.1–3 Many soft robots, however, incorporate rigid components either because of design limitations or as a trade-off to improve their ability to apply external forces. 4 In mobile robots that explore confined spaces, reducing rigid components and incorporating highly flexible structures may be crucial for enhancing navigation safety.5,6
The soft robotic module in this study is silicone -based and incorporates an origami-inspired actuator. The elastic silicone creates a completely soft component and provides strong traction through an elastic suction cup. The compliant origami actuator is made of plastic sheets, which can be further softened with advanced manufacturing techniques. 7 By integrating a suction cup with an origami actuator under a single pneumatic drive, our module achieves both surface adhesion and locomotive capabilities in one fully soft design, unlike previous soft mobile robots,8–10 which typically rely on separate or partially rigid mechanisms. Our module achieves adaptable traction on various surfaces and precise motion through its suction cup and origami actuator.
While many soft-bodied robots have demonstrated locomotion capabilities as single mobile robots,11,12 the cooperative functionality of modular robots remains relatively unexplored. Although most modular soft robots have focused on achieving multifunctionality through modular assembly13,14 and self-reconfigurable structures for adaptability,15,16 our approach is unique in that it creates an interconnected robot system composed of soft modular robots and flexible bodies that enable effective interactive behaviors such as object grasping. Other modular soft robots have utilized distributed behavior for collective tasks,17,18 but our system uses locomotive modules as active control points to drive the entire robot system. This simplifies control by allowing modules to lead, whereas the flexible bodies passively respond. Furthermore, unlike systems that require control frameworks tailored for soft robots,19,20 our approach offers a straightforward control mechanism where modules govern the system’s behavior. In comparison with prior work on similar systems that relied on rigid modules, 21 our work is distinguished by highly elastic modules and an interconnected configuration, which allows for more arbitrary cooperative abilities. In particular, our flexible envelopes with granular jamming provide a tunable stiffness link between modules, enabling multipoint grasping and safe adaptation in cluttered environments, capabilities not commonly found in previous modular designs. Last, while rigid modular robots achieve adaptability through module reconfiguration,22,23 offering precise control and high force output, they lack the flexibility for safe environmental interaction. In contrast, our system uses flexible bodies between modules, enabling safer and more adaptive interaction.
Soft robots typically struggle to generate high force due to their inherent flexibility, limiting dynamic interaction with the environment. To address this, our robot incorporates granular jamming, transitioning granules from a fluid-like to a solid state,24,25 to enhance structural rigidity and prevent yielding under stress. Granular jamming has been applied in many robotic systems, such as grippers and mobile robots,26,27 to modulate rigidity as needed. While different methods of jamming exist,28–30 we employ a pressure differential. This choice aligns with our design strategy to unify the robot’s actuation into a single pneumatic system.
In many robotic systems, different components often require separate actuation methods (e.g., motors for locomotion and vacuuming for stiffness modulation), which increases system complexity and control overhead. Our robot consolidates all functions, including suction cups, origami actuators, and jamming bodies, into a single pneumatic actuation method, simplifying the mechanical architecture and control system complexity. While other methods such as shape memory alloys 31 or magnetic actuators 32 could be used, pneumatics was chosen for its safety, speed, and controllability.33–35 We recognize that sealing can be a critical challenge in vacuum-based systems; however, by focusing on one pneumatic line rather than multiple actuation modes, our design confines potential leakage paths to a single subsystem, streamlining both leak detection and maintenance. This unification enhances the system’s reliability and maintainability, especially in mobile robot applications where space and weight are limited. 36
The contributions of this article are thus as follows:
the development of a highly soft locomotive module as a collective element for a larger robotic system; the creation of an interconnected soft robot system that effectively interacts with the environment through granular jamming, wherein the movement of modular elements enables distinctive system-wide control; and the unification of actuation methods into a single vacuum source for all robot functions.
Design of the Soft Locomotive Module and the Interconnected Soft Robot System
Soft locomotive module
The soft locomotive module was cast as a single piece from silicone rubber (Smooth-On, Mold Star 30) using a three-dimensional-printed mold that forms suction cups and encases airflow tubes and origami-inspired actuators (Fig. 1b).
One module incorporates three origami actuators in a triad configuration, enabling omnidirectional movement via coordinated actuation. We chose a prismatic joint for the actuator to create relatively precise and direct motion. We adopted a waterbomb crease pattern37,38 to (i) achieve significant axial deformation, (ii) enable easy manufacturability, and (iii) ensure robust folding. 39 The origami structure consists of five tiles with a side length of 30 mm (Fig. 1c).
Fabrication methods were taken from previous work, 40 using PET and PVC sheets with laser-cut creases. To complete the actuator, the structure was encased in a 100 µm thick plastic pouch and incorporated into the module through the same silicone rubber, enhancing contraction displacement and material uniformity. The contraction and elongation of the actuator are controlled via pulse-width modulation. This strategy, termed “modulated actuation control,” modulates air pressure in the actuator by switching a valve. It incites a small oscillation in the module, mitigating potential misalignments and contributing to robust locomotion. The detailed control algorithm is described in Supplementary Data S1.
We utilized a “two-anchor” crawling process in module locomotion for robust and reliable movement. 41 To enable this on various surfaces, anisotropic friction was achieved by pneumatically switching suction cups formed at both edges of the module’s arc-shaped foot. Figure 2a shows one locomotion cycle, with the module traveling approximately 0.22 per foot length (9.9 cm).
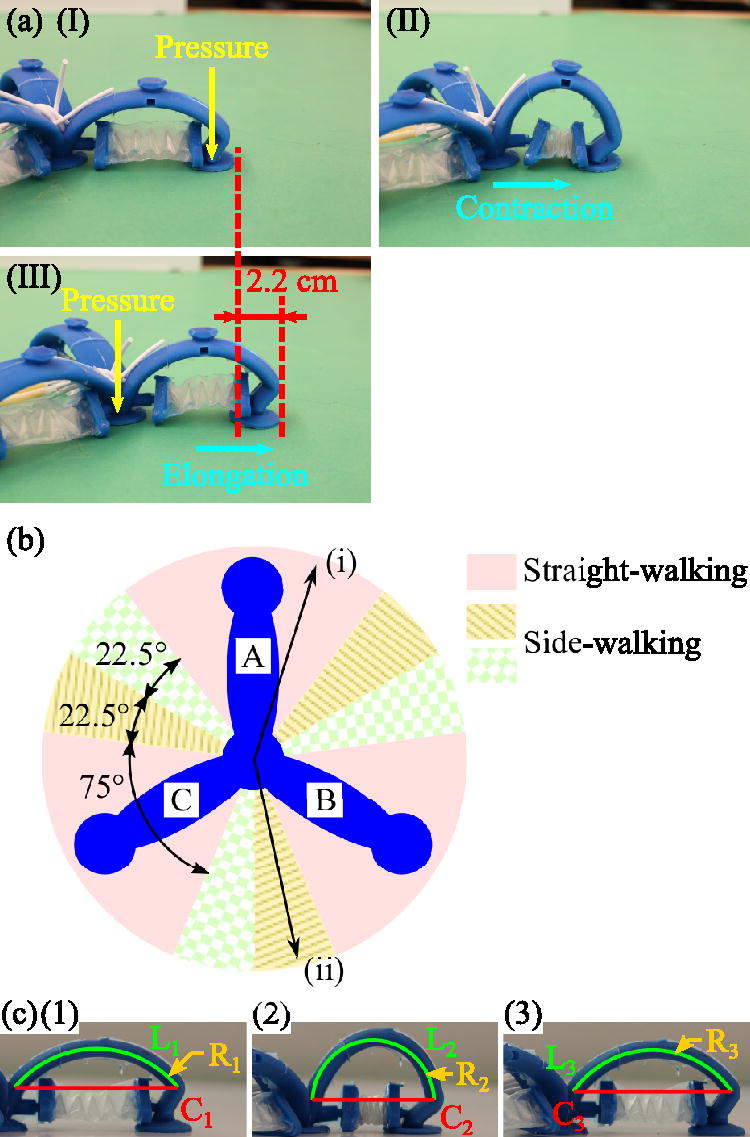
The module has two locomotion modes: “straight” and “side walking.” In straight-walking, the module moves in the direction of the activated foot. In side-walking, two feet are activated sequentially, propelling the module in the direction midway between two activated feet. The walking mode regions, empirically determined for stable movement, correspond to nine angle-defining regions (Fig. 2b).
The suction cup (5.7 cm2 effective area) features a thin “lip” for robust suction. The suction force is calculated as:
Given the vacuum pump’s negative pressure of 76.5 kPa used in this study and ambient pressure of 101.3 kPa, each cup produces 101.7 N. Since the suction cup holds against transverse movement, the holding force F is
To analyze the foot’s deformation behavior, we developed a model, assuming a pure arc foot with chord length
Modeling the foot deformed geometry allows us to estimate the foot recovery behavior. The elastic energy model in Supplementary Data S2 estimates the foot recovery time as 0.44 s compared with the experimental result of 0.95 s, likely due to manufacturing defects and nonuniform deformation. Although the model makes several assumptions, such as linear elasticity and mass-spring-damper behavior, it provides useful guidance for optimizing the module’s locomotion by informing foot configuration and material properties.
Interconnected soft robot system
The interconnected soft robot system was constructed by linking several locomotive modules via flexible envelopes that can be stiffened through jamming (Fig. 1a). The envelope, constructed from vinyl fabric (MJ Trends), formed a 45 cm long and 14 cm wide pouch. It was filled with fourteen 43 mm diameter plastic balls, and the total assembly weighed 72 g. Modulating the envelope’s stiffness is achieved by vacuuming the air inside it, which initiates granular jamming. While unjammed, the envelope is flexible enough and adapts its shape in response to the connected module’s motion or physical interaction. In the jammed state, the envelope stiffens and maintains its shape. In this work, four modules were distributed in the system, one centrally and three at the periphery, each constrained by the flexible envelope in a radial layout. All functional elements are connected to a single vacuum source through switching valves.
Experimental Results and Discussion
The experimental setup consists of a visual tracking system, a microcontroller to switch pneumatics, and a computer running the Robot Operating System (ROS). A camera tracks the poses of modules from above the experimental area using AprilTag markers. 42 The ROS system processes pose information to execute control algorithms by sending control inputs to the microcontroller and operating modules.
Performance evaluation of a single locomotive module
The performance of a single soft locomotive module was evaluated in terms of locomotion speed, accuracy, and traction force to validate the functionality of the module as a mobile unit within an interconnected robot system.
The module’s traveling speed was measured for straight- and side-walking modes on three surfaces: paper, polystyrene, and medium-density fiberboard (MDF). To achieve robust movement, two locomotion strategies were involved in addition to the process described in Figure 2a, detailed in Supplementary Data S1.
Figure 3a shows the average locomotion speed over 10 trials for 2 walking modes on 3 surfaces. The straight-walking was faster on paper and polystyrene than on MDF, likely due to different surface roughness. The suction cup’s robust design ensured secure attachment on all surfaces, making the foot contraction process largely unaffected by surface texture. However, foot elongation that occurs due to the elasticity of the bent foot was impacted by surface friction, particularly on MDF’s rough texture, slowing locomotion.

In the side-walking mode, the module was quickest on MDF. Continuous side-walking hindered the completion of distorted foot restoration, causing the feet to spread into a “T”-like shape. On smoother surfaces such as polystyrene and paper, the module moved more accurately in the intended direction, but this caused greater distortion and feet spreading, reducing lateral movement. Conversely, on the rougher MDF surface, each foot activated less accurately during side-walking and maintained the module’s tripodal form, resulting in faster movement in the intended direction.
Figure 3b shows the locomotion accuracy of each walking mode. The module location reached after each walk was compared with the theoretical location based on the module’s design. Straight-walking was, as expected, very accurate. Conversely, both side-walking modes, one always activating the unilateral foot first and the other activating two feet alternately, caused a sideward shift during locomotion. This can be attributed to actuator nonuniformity due to fabrication limitations. Some actuators exhibited degraded motion because of pneumatic leakage, leading to a shift in the motion in a favored actuator direction. Notably, side-walking activating two involved feet alternately showed high precision. This method allowed for more balanced movement by compensating for actuator biases. The hybrid-walking, alternating between straight-walking intended to advance forward and side-walking aimed at moving backward, was supposed to maintain the module’s original position. However, the module shifted forward, indicating the dominance of straight-walking. While the straight-walking was verified as more accurate locomotion, note that the module ultimately moves as a control point in the interconnected system, employing both walking modes.
Traction force was measured using a Vernier Dual-Range Force Sensor, with the module pulling the sensor via a string. The peak traction force was 3.5 N, sufficient to maneuver the combined 225 g weight of one module and the envelope. This result validates not only our module’s effectiveness in driving the interconnected system but also its ability to take over in case another module fails. This demonstrates the potential for redundancy and cooperative functionality of the module robot system. Although the module was tethered to external vacuum and power sources during experiments to ensure extended operational time, the results indicate the possibility for untethered operation. Equipping the module with a pump producing 30.5 kPa at a weight of 40 g, combined with a control system and battery, would result in a total device weight of approximately 240 g. Given the module’s traction capacity, this additional load could be easily managed.
A performance comparison with existing pneumatically actuated soft robots is summarized in Table 1. Focusing solely on speed, our module was tested in a “high-speed” mode (Supplementary Video S1), without triggering the robust locomotion strategy. Loading capability was assessed on a polystyrene surface with a static coefficient of friction of 0.20. Our module demonstrated comparable speed even under load. When compared with similar inchworm-like locomotion, our module exhibited decent speed. Although it was slower than other origami actuator robots, our module is unique in achieving omnidirectional movement without the need for turning and enabling safe actuation without the use of positive pressure.9,16,17,43–46
Performance Comparison of Mobile Soft Robots, with Speed Expressed in Units of FL, BL, or AL
AL, actuator length; BL, body length; FL, foot length.
Metrics of Assessing the Grasping Adaptability and the Transporting Stability for Different Objects
Functional experiment of the interconnected soft robot system
To validate the interconnected soft robot system’s functionalities, four experiments were conducted: shape formation, object transportation, obstacle navigation, and slope ascent/traverse. Throughout these experiments, two algorithms, “immobilization detection” and “recovery maneuver,” were running alongside the locomotion control algorithm. These are detailed in Supplementary Data S1.
Shape formation and locomotion
This experiment examines the system’s ability to form and maintain shapes during movement, assessing its potential to efficiently navigate diverse environments by adapting its shape. Two formations were tested: a compact shape minimizing overall dimensions and a triad configuration extending peripheral modules radially. Figure 4a illustrates the compact shape formation process, showing one example of this experiment scheme. Peripheral modules were positioned based on AprilTag data using the central module as a reference. All modules then moved toward the target, with the system’s shape monitored every five locomotion cycles to maintain it.

Figure 5a shows the system’s shape formation and locomotion sequence. Initially, the system spread over 84 cm [Fig. 5(I)]. Upon achieving a compact shape [Fig. 5(II)], the characteristic length decreased to 53 cm, a 37% reduction. The system then moved 28 cm to the right, while maintaining compactness, with its length reaching 48 cm by Figure 5(III), a 9% deviation from the compact formed shape. This demonstrates effective shape maintenance during locomotion and the system’s ability to wind its flexible envelopes around the central module compactly, which is a useful trait in environments such as narrow corridors. A priori knowledge of the environment enables the system to adopt an optimized shape, such as a straight line, further reducing its characteristic length for efficient navigation.

In the triad shape formation experiment, the formation accuracy was evaluated by the angles between extended flexible envelopes, ideally at 120°. Initially, the angles were random [Fig. 5(i)]. After forming the triad shape [Fig. 5(ii)], the average error from 120° was only 4°. Postrightward locomotion [Fig. 5(iii)], moving 22 cm, the error reduced to 2°, indicating effective triad shape maintenance during locomotion. Preserving the desired shape is critical for efficient locomotion control, especially given the system’s inherent flexibility and potential significant deformation.
Object grasping and transportation
This experiment evaluates the system’s ability to grasp and transport an object via jamming.
As a preliminary experiment to demonstrate the effectiveness of jamming, a straight envelope with two modules on the edges was used to push a 1314 g glass cylinder in both unjammed and jammed states (Fig. 6a). When unjammed, the envelope deformed upon contact with the object, while in the jammed state it nearly maintained its original shape. From previous work, 47 the bending stiffness of an envelope with a 30% volume fraction and a 3.3 width-to-particle diameter ratio was estimated to be 0.8 N/cm when unjammed and 2.2 N/cm when jammed. In our experiment, we measured 0.27 and 1.2 N/cm, respectively, both of which showed greater flexibility. We attributed this to particle displacement during lateral movement in the unjammed state and a movable module-envelope connection for both cases. Overall, the jammed state was 344% stiffer than unjammed, demonstrating the effectiveness of jamming in increasing structural stiffness.

Figure 4b illustrates the object grasping procedure. To validate adaptable grasping capability, the target object’s position was provided via an AprilTag but not its geometry. The system maneuvered the modules to effectively grasp the object using flexible envelopes. Once the object was engulfed, jamming was activated to enable a secure grasp, followed by transporting the object. In this experiment, three objects of varying shape and size were tested: a 650 g bottle, a 190 g rectangular box, and a 264 g trigonal prism.
Figure 6 shows the result of grasping and transporting (1) bottle-shaped, (2) rectangular, and (3) prismatic objects. Given the object position and calculating heading angles to peripheral modules, the system automatically identified modules for grasping [circled red in Fig. 6(1)]. Without sensing the grasped object geometry, the system successfully grasped the object consistently across all objects by extending and closing the flexible envelopes through the coordinated movement of modules. The result verifies the system’s ability to interact with the environment adaptively through its compliant nature. This capability was assessed using the proportion of the object’s perimeter embraced by the flexible envelope [Fig. 6 (3, III, and iii), Table 2]. Although the robot was only in contact with 35% of the bottle due to its distinctive shape, the other objects were approximately 48%. Considering the grasping operation as pinching or interlocking through the envelope, the assessed values validate successful grasping.
Figure 6 also shows that jamming secures the grasp and immobilizes the object during transportation. Stability was assessed by the rate of change in the distance between the centroids of the triangle formed by the grasping modules and the object [Fig. 6 (4-5, IV-V, and iv-v), Table 2]. Since jamming did not immobilize the bottle against rolling and the grasped bottle posture emptied the room inside envelopes largely, it exhibited the highest rate of change, still 18%. The box had the most stable transport, with the grasped pose placing centroids closest together. For the prism, instability may be due to the direction of transport being mostly parallel to the jammed envelope.
Notably, the system successfully grasped and transported various objects under the same control scheme, demonstrating its adaptability. The system validated the potential as a cooperative modular soft robot by transporting the heavier object (650 g), which was unachievable with a single module.
These experiments highlight the robot system’s inherent compliance, which is useful for safe, passive adaptation to external objects, and underscore the value of jamming for tasks requiring shape retention or precise module localization. Specifically, when the system must preserve its global shape, lock a grasped object’s position, or prevent unwanted passive deformations, activating the jamming mechanism confers significant benefits by stiffening the envelopes. Thus, even though the objects tested here are not excessively heavy, the ability to switch between a compliant and a stiffer state ensures our robot can handle real-world variability, such as external disturbances or the need to maintain a stable formation.
Obstacle navigation
This experiment investigates the system’s ability to navigate a complex environment, utilizing its compliance and ability to not rely on precise sensing and control. The system moved to a target point while monitoring each module’s contact with an obstacle. Figure 4c illustrates the algorithm for detecting contact and avoiding obstacles. Given the system’s triad shape, the central module was not involved in the avoidance maneuver; instead, the peripheral modules evaded the obstacle by moving toward the central module, thereby folding the connected envelope.
Figure 7 shows the system navigating through three obstacles while moving right. The modules in contact with obstacles [circled with red dots in (b, d)] evaded them using the avoidance algorithm (c, e). Interestingly, some modules that collided with the obstacle managed to pass it without initiating the avoidance algorithm by simply moving rightward [highlighted in green, (d–f)]. This validates the system’s ability to passively adapt to the environment through its flexible nature. Notably, the system successfully navigated the complex environment using only AprilTag position and central module identification, with a simple controller for rightward movement and obstacle avoidance algorithm. The result highlights the potential for fully autonomous navigation with devices such as inertial measurement units for module motion detection.

The system navigating obstacles.
Slope ascent and traverse
This experiment focused on assessing the effectiveness of the locomotive module’s suction cup in achieving high-friction contact. Figure 8 shows the system (1) ascending a 9° slope and (2) traversing a 17° slope.

Demonstration of the interconnected soft robot system (1) ascending a slope in 9 m 0 s and (2) traversing a slope in 8 m 0 s. Misaligned suction cups are in green dotted circles. The traverse slope direction is from bottom to top in the figure.
The successful ascent demonstrates the advantage of employing suction cups in the locomotive module, improving incline navigation. While traversing, the system maintained the module longitudinal positions without slipping, as at least one suction cup remained active during locomotion. This was achieved without extra vacuuming or peculiar locomotion procedures, though significant misalignment of the suction cup occurred (green dotted circles in Fig. 8), likely due to the incline preventing the arc-shaped foot from recovering especially when the side-walking directed the module into the incline. Additionally, the ascending/traversing of other modules contributed to this misalignment by enforcing the movement through their envelope connections. Despite these limitations in versatile locomotion, the result highlights the potential of the interconnected system’s cooperative behavior, with modules working together to complete a task as a whole.
Design Optimization of the Interconnected Soft Robot System
Since the interconnected soft robot system is constructed by linking locomotive modules via flexible envelopes, it allows for an arbitrary arrangement of modules. One could optimize the layout of the system to enhance its performance depending on the task. To this end, a design optimization study was conducted via simulation and a genetic algorithm (GA).
Simulation and GA setup
The simulation was based on Pymunk, a 2D physics library, 48 including two agent types: an “actively controlled body,” representing the module, and “segmented components linked by pivot joints” as the flexible envelope. To exemplify the optimization of the system’s flexible adaptability, we simulated a grasping operation, assuming the system was aware of the object’s general direction but not its exact location while using a simple feedforward controller for locomotion.
Grasping quality was evaluated using three factors:
The GA was used to explore broader design space. 50 The system began as a single module, with additional modules and flexible envelopes added incrementally based on design parameters detailed in Supplementary Video S1. These parameters formed the GA input chromosome, as exemplified in Figure 9. A rank-based selection method ensured diverse design evolution and one-point crossover method cut-and-combined different designs at specific modules. The GA parameters are summarized in Supplementary Video S1.

An example system design with parameters
Optimization results
The optimized systems with high grasping quality for circular and hexagonal objects are shown in Figure 10. Given the GA’s stochastic nature, two distinct results were output. Table 3 summarizes their grasping quality factors.

Optimized interconnected soft robot system designs (left) and the final state (right) of grasping a
Summary of Grasping Quality Factors and Their Sum
Despite yielding a variety of designs, several common features were generated among the optimized systems. In Result #1, a branching “arm” leading to a triad shape was observed for both objects, enhancing
While the simulation explored broader system designs without hardware limitations, a physical experiment was conducted to validate the performance of the optimized Result #2 with a hexagonal object (Fig. 10c). Table 3 compares the results for
While a singular optimized design potentially constrains the system’s performance across diverse environments, multiple optimized designs demonstrate its adaptability for broader situations. The simulation result offers insight into optimizing the interconnected soft robot system design for enhanced robustness.
Conclusions
This article presented an interconnected soft robot system with soft locomotive modules and flexible envelopes capable of stiffness modulation via jamming. The interconnected design allows the modules to function collectively or as control points, dynamically interacting with the environment. The system’s cooperative abilities were demonstrated through experiments in shape formation, object grasping and transportation, obstacle navigation, and locomotion across various terrains. Design optimization through simulation further demonstrated the system’s adaptability and robustness in task completion.
Footnotes
Authors’ Contributions
K.T.: Conceptualization (equal); data curation (lead); formal analysis (lead); investigation (lead); methodology (lead); resources (equal); software (lead); validation (lead); visualization (equal); writing—original draft (lead); and writing—review and editing (equal). M.S.: Conceptualization (equal); funding acquisition (lead); project administration (lead); resources (equal); supervision (lead); visualization (equal); and writing—review and editing (equal).
Author Disclosure Statement
The authors declare the following financial interests/personal relationships, which may be considered as potential competing interests: K.T. and M.S. report financial support was provided by National Science Foundation.
Funding Information
This work was supported by the National Science Foundation Grant 1830939.