
Abstract
Existing climbing robots achieve stable movements on limited surface types. However, adapting a single robot design to various surface shapes remains a substantial challenge. Based on the van der Waals (vdW) force-mediated adhesion mechanism of a gecko foot and negative pressure from octopus suckers, this study introduces a biomimetic integration strategy for designing and fabricating a pneumatically actuated switchable adhesion system (SAS). The SAS includes an adhesive material responsible for generating vdW forces and a suction cup with a membrane structure that enables a vacuum suction force. Owing to nonlinear superposition effects, this SAS exhibited a 56.4% higher adhesion force than the algebraic superposition of the vdW and vacuum suction forces. Moreover, the SAS offers a quick switch between adhesion and detachment through pneumatic modulation, achieving a synergistic balance between adaptability, robustness, and load-bearing efficiency. Equipped with this SAS, we developed a pneumo-electrically actuated quadruped-climbing robot that can climb planes with different tilt angles and surfaces with different curvatures.
Introduction
Climbing is an impressive ability that enables animals to adapt to intricate natural surroundings for survival but remains a grand challenge for legged robot, especially on tilt angles and curved surfaces. 1 The end effectors are rather crucial but challenging to optimize due to the need to balance adhesion mechanism, driving energy, and manufacturing within various restrictions such as geometric, energetic, and weight limits.
The suckers inspired by octopuses are highly adaptive to different surfaces, including underwater and rough terrains,2–4 and may be quickly detached5,6 but showed low energy efficiency and load capacity when the power source and body size are constrained. 7 Climbing robots equipped with such suckers can attach to diverse environments but generally require larger sizes and external power sources.8–10
In comparison, the adhesives inspired by geckos11,12 have the potential to generate strong adhesion forces.13–17 These adhesives have been successfully applied to various adhesive grasping mechanisms18,19 and climbing robots.20–26 However, artificial adhesives are only capable of producing adhesion when subjected to sufficient preloads and detaching with precise control of the peeling angle. 27 Some researchers have introduced smart materials whose shape and stiffness can be changed under stimulation such as heat28–30 and magnetism31–34 to provide preloads to the adhesives, while some others used pneumatic to provide preloads,35,36 therefore increase the adhesion. Compared with others, the pneumatic preload systems are rather excellent in maximizing load capacity and energy efficiency.37–41 For example, Song et al. and Koivikko et al.42–44 developed adhesive end effectors using pneumatic preload systems. The uniformed pressure as preloads enables the end effector to effectively conform to the surface well and generate strong adhesion. On the other hand, the high level of stickiness poses difficulties when trying to separate. Few studies have comprehensively considered the interchange process from adhesion to detachment. Frey et al. 45 designed a kind of device with the capability of attaching and detaching but had to sacrifice its load capacity. To facilitate robust and fast climbing in legged robots, it is crucial to develop innovative end effectors that can consistently grip onto surfaces with significant force and detach quickly.
Nature has shaped the climbing animals’ specialized adhesion mechanisms and structures. Integrating knowledge from different species is, therefore, promising to yield excellent end effectors with exceptional adaptabilities. By taking advantage of suckers inspired by octopuses and adhesives inspired by geckos, we developed a new kind of end effector for climbing robots. switchable adhesion system (SAS) is composed of a soft shell and a membrane covered with adhesive material. The shell was partitioned by the membrane, creating an upper air chamber and a bottom skirt. Upon negative pressure being applied, the SAS adducted like the geckos’ toes and touched the surfaces. The attraction generated by the shell can also function as a preload to the adhesives, helping it achieve better contact with the substrate surfaces with different curvatures. Conversely, exerting positive pressure on the SAS will cause an abduction, releasing the adhesion easily. Such kind of switchable adhesive end effector with low energy consumption will largely advance the climbing robots by endowing the competence of moving on tilt angles and curved surfaces (Fig. 1).
Design, Materials, and Methods
Design and functions of the SAS
SAS is composed of an external soft shell and a membrane with an adhesive material powered by an air pump (Supplementary Figure S1). During operation, negative pressure is first applied within the chamber of the SAS, enabling rapid attachment to various surface shapes (flat, convex, and concave) and angles (0–30°) through the adaptability of vacuum suction. Concurrently, atmospheric pressure presses the adhesive material on the membrane against the surface, establishing a van der Waals (vdW) force between the microstructures of the adhesive material and the surface. For prolonged operation with reduced energy output, the air pump ceases, equalizing the internal and atmospheric pressures of the chamber and relying solely on the vdW forces of the adhesive material for stable attachment. For active detachment, positive pressure was introduced into the chamber, causing the membrane to deform and progressively unload the vdW force from the outer edge of the adhesive material.
Material and fabrication of the SAS
The mold utilized for the SAS was manufactured employing an FDM 3D printer (Raise3D Pro3) with a PLA (Polylactic Acid) material (PLA Pro, Polymaker). The SAS employed two materials with different hardness values (further details are provided in Supplementary Data, Supplementary Table S1). The specific shape of the adhesive material 46 (a microscale mushroom-shaped adhesive material with an elastic modulus of 3 MPa) was achieved by die cutting and bonding it to the membrane utilizing silicone glue (Sil-poxy, smooth-on).
Testing method of the SAS
The mechanical performance of the SAS was tested on a two-axis linear stage (Supplementary Fig. S2). The SAS was mounted onto a six-axis force sensor (GLH91003AAO, NBIT) via a fixture and moved uniformly utilizing a two-axis linear stage. To better observe the adhesion and detachment processes of the SAS, a black LED strip was installed along the perimeter of an acrylic board (roughness, Ra = 6.781 nm), and a reflective mirror (100 × 50 mm) was placed underneath at a 45° angle to the ground. A high-speed camera (1280 × 1024 pixels, 120 fps, BFS-U3-13Y3C) was utilized to capture the adhesion and detachment processes of the SAS utilizing an acrylic board from the bottom via a reflective mirror (further details are provided in Supplementary Data, Supplementary Figure S3 and S4).
Results and Discussion
Characterization and synergistic performance of the SAS
The SAS is composed of a soft shell and flexible membrane (Fig. 2A). The membrane is covered with adhesive material along its outer diameter

Illustration of switchable adhesion system (SAS). Demonstrating adaptivity and excellent climbing capabilities when integrated with the robot.

Characterization of SAS.
To evaluate the adhesion performance while eliminating the influence of negative pressure, the SAS was reconnected to the atmosphere to return the chamber to its original configuration. Finally, it was detached from the surface (Fig. 2C). The force exerted by atmospheric pressure on SAS is represented by
At ambient pressure, the SAS primarily depended on the adhesive material. When combined with the normal synergistic force due to negative pressure, optimal adhesion performance was achieved. Transitioning from −10 to −40 kPa, the vacuum suction force increased by 4.9 N, while the normal synergistic force strengthened by 10.3 N (Fig. 2E). The normal adhesion force, primarily attributable to vdW interactions, remained stable throughout the pressure change, indicating an effective and uniform load at atmospheric pressure. Notably, the normal synergistic force exceeded the combined normal adhesion and vacuum suction forces, particularly at higher negative pressures (at −40 kPa, the vacuum suction force was 8.5 N, the normal adhesion force was 8.7 N, and the normal synergistic force was 26.9 N, 56.4% higher than the algebraic superposition of the vdW and vacuum suction forces). The strategic application of negative pressure enables the nonlinear superposition of vdW and vacuum suction forces, effectively constraining variations in the peeling angle of elastomeric materials. The compressive stress exerted by negative pressure predominantly concentrates at the edge (Fig. 2B). Maintaining the peeling angle at an invariant zero degree and maximizing the normal synergistic force. 48 Despite operating at lower pressures, the SAS maintained superior performance. Figure 2D, utilizing FEM, illustrates equal stress distribution within the SAS in a concentric circular area (410 mm2) from the soft shell-membrane junction to a 16 mm radius from the membrane center, marking it as the optimal area with adhesive material. Adhesive materials were prepared in three different sizes guided by the FEM: 16–28 mm (Fig. 2D1), 22–28 mm (Fig. 2D2), and 5–28 mm (Fig. 2D3). Despite the larger contact area in the 5–28 mm range, uniform contact was not achieved.
Detachment performance and inclination adaptability of the SAS
Distinct detachment behaviors of the SAS were observed under varying air pressures and applied force conditions. Model I enables control over the peeling angle through air pressure adjustments, while Model II requires additional detachment force (Fig. 3A; Supplementary Figure S6). Two cases were offered in Model I: complete positive pressure detachment and mixed force-pneumatic detachment (Fig. 3A). These selectable detachment options hold significant potential in practical applications, particularly in Case 1, enabling faster and more efficient detachment. This enhancement in active detachment capability is crucial for diverse applications. Figure 3B illustrates the detachment process of the SAS under positive pressure utilizing FEM. The pressure induced an arc-shaped deformation of the membrane and soft shell, generating tensile forces

Detachment and inclination performance of SAS.
In practical applications, ensuring the adaptability of the SAS at various contact angles with the surface is crucial for effective adhesion. We conducted extensive testing over the 0–30° tilt angle range to verify this capability. The pull-off force includes both normal and tangential components. Figure 3F illustrates that the preload force gradually increased as the tilt angle of the surface increased, and the corresponding normal adhesion force gradually decreased. Nevertheless, at an angle of 10°, the SAS maintained 78.1% of its original adhesion performance (adhesion performance at 0°), and even at an angle of 30°, it exhibited sufficient adhesion performance (3.9 N, ∼44.8% of the original adhesion performance). When the surface tilt angle exceeded 30°, it was difficult for the SAS to achieve stable adhesion owing to the structural distortion. In Figure 3E, we utilized FEM to investigate the initial damage locations during detachment from surfaces with different tilt angles, illustrating that as the tilt angle of the surface increased, the damage area decreased significantly, making the adhesion more susceptible to damage under these conditions.
Further analysis of the SAS performance at different tilt angles is presented in Supplementary Fig. S7. Supplementary Fig. S7A illustrates that as the tilt angle increased, the detachment of the adhesive material became more pronounced. While the active detachment functionality was maintained at lower tilt angles, it was not maintained at larger angles (30°). This inadequacy can be attributed to the greater tilt angle, which prevented the membrane from forming an efficient seal, resulting in air leakage and insufficient positive pressure generation. The robust structural design ensures the continuity of the nonlinear superposition effect within a tilt angle range of 0–30°. Moreover, the synergistic normal forces demonstrated an improved performance under increased negative pressure.
Switchable adhesion on curved surfaces
On flat surfaces, the SAS provides higher synergistic forces in both the normal and tangential directions compared with individual suction cups or adhesive materials (Supplementary Fig. S8). However, object surfaces frequently exhibit non-ideal complex geometries. Standard suction cups struggle to seal concave surfaces (Supplementary Movie S1), and adhesive materials often fail to achieve uniform contact on these surfaces. Thus, the ability to adapt and effectively address these curved surfaces, ensuring stable adhesion and efficient detachment, is a crucial demonstration of the functional completeness of the SAS. Figure 4A illustrates the normal and tangential adhesion forces on the SAS across the three convex diameters. A decline in the normal adhesion force was observed with decreasing diameter. Particularly, for convex100, the mean normal adhesion force was 2.0 N, a 77.0% reduction from the 8.7 N of the flat surface. The pressure changes negligibly affected the normal adhesion force on convex surfaces (Fig. 4B). Despite the influence of the diameter on the normal adhesion force, its effect on the tangential adhesion force was minimal under varying pressures, as evidenced by the insignificant differences in the tangential adhesion forces on the convex and flat surfaces (Fig. 4C). The FEM simulations (Fig. 4D) corroborated our experimental findings, illustrating an increase in the normal adhesion force with increasing convex diameter and no significant maximum tangential force (defined as the pull-off force along the tangential direction) variation on the curved surfaces. Similar observations were made for concave surfaces (Fig. 4G and H). The directional force acting on individual micropillars during tangential detachment 50 aligns with the axial direction of the arc-shaped surface, thereby maintaining a constant maximum tangential force across various surface geometries. However, during normal detachment, the force direction on micropillars transitions from predominantly perpendicular to a flat surface to a combination of normal and tangential forces on the curved surface. This change in force direction is influenced by variations in surface geometry, ultimately resulting in a reduction of the normal adhesive force within the micropillars.

Performance of SAS under different geometries.
Next, we investigated the additional detachment force applied by the SAS on the convex surfaces and its dependency on the adhesion and detachment air pressures. Figure 4E illustrates the decline in additional detachment force with increasing detachment air pressure, most pronounced on convex100, achieving the minimum detachment force at 15 kPa, while convex250 and convex500 at 20 kPa. Negative pressure had an insignificant effect on the detachment force. Experiments utilizing the SAS on concave surfaces with three distinct diameters yielded results similar to those obtained on convex surfaces. In particular, a higher positive pressure was required for active detachment on concave surfaces. This phenomenon was attributed to the concave geometry, which inherently complicated the detachment of the adhesive material from the mechanism. The diminutive diameter of the concave surface exacerbated the difficulty of detachment, necessitating higher air pressure for successful detachment. Specifically, concave100 and concave250 required a minimum detachment force of 30 kPa. In contrast, a larger diameter, as in concave500, required a lower air pressure of 25 kPa for the minimum detachment force (Fig. 4J).
In summary, SAS demonstrated exceptional robustness for tilt angles and convex and concave surfaces. It maintained stable adhesion performance at different contact angles, enhancing its applicability in practical scenarios. For convex and concave surfaces, our experimental results indicated the ability of SAS to achieve strong adhesion and rapid detachment. Particularly on concave surfaces, effective detachment is still attainable despite the need for higher positive pressure. Compared with current end effectors (Table 1), the SAS offers a balanced design that achieves strong adhesion with negligible preload and facilitates quick detachment.
Summary of Driving Modes, Structural Characteristics, and Adhesion-Detachment Properties of End Effectors
A triangle
Variation of preload with contact surface curvature.
Force measured with a liquid membrane between the gripper and the object.
Calculated from Figure 2 in the text.
Gripping force produced by multiple combinations of the flexible gripper.
5–7 s required for the suction operation and 9–12 s for the detaching operation.
Measured pressure differential.
Measurement conducted using the entire robotic arm and multiple suction cups, with the overall diameter unknown (−55 kPa).
Climbing robot utilizing the SAS
An adaptive and robust SAS was applied to a bio-inspired quadrupedal climbing robot, enabling autonomous climbing of curved surfaces of varying curvatures and maneuvering across walls and ceilings. The adhesion and detachment actions of each robot leg were facilitated by a pneumatic circuit consisting of an air pump and two directional valves (two-position, three-way valve). During attachment, the positive pressure circuit was connected to the atmosphere, the negative pressure circuit was connected to the chamber, and a reverse configuration was utilized for detachment (Fig. 5). The relationship between the pressure, flow rate, and time in a single pneumatic circuit (Supplementary Fig. S9) indicated that the SAS was fully adhered from T1 to T2 and fully detached from T3 to T4. In actual operation, the air pump in a single pneumatic circuit of the robot has a maximum negative pressure of −40 kPa and positive pressure of 14 kPa, with maximum flow rates of 0.7 and 0.8 L/min under negative and positive pressures, respectively. The time required for complete adhesion of the SAS is 2.1 s, and complete detachment takes 0.8 s. However, owing to the movement of the robot legs, full adhesion and detachment are not required in actual operation, with actual adhesion and detachment times being 1 and 0.5 s, respectively.
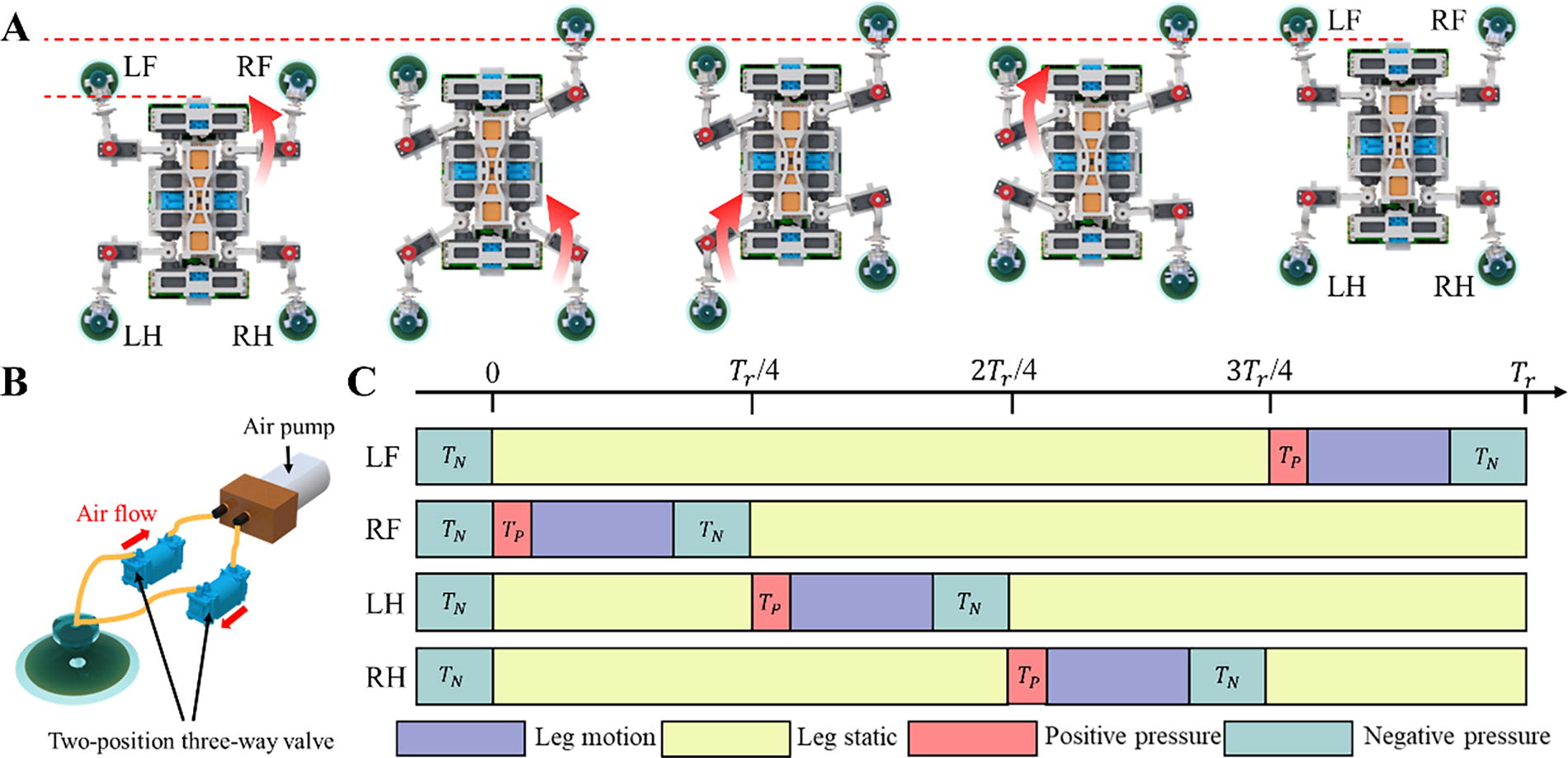
Working principle of climbing robot.
The climbing robot was operated utilizing a triangular gait (Fig. 5A), where, at any given moment, the three legs were in a static and attached state, and one leg was in motion and detached. This gait effectively maintains the stability of the robot. In practice, the robot adjusted its adhesive and detached states by coordinating its leg movements with the SAS. The working state of each leg within the motion cycle
Supplementary Fig. S10A illustrates that at ambient pressure, a single SAS can stably suspend a weight of up to 0.8 kg. As illustrated in Supplementary Fig. S10B, the load capacity of the mechanism is increased under sustained negative pressure to suspend a 2 kg weight stably. In addition, as illustrated in Supplementary Fig. S10C, a single SAS achieved autonomous detachment without additional force applied, providing a solid foundation for the robot to climb and attach to vertical surfaces (Supplementary Movie S2). Finally, the climbing robot equipped with the SAS successfully exhibited 90° vertical and 180° inverted climbing on flat, concave, and convex surfaces, each with a diameter of 500 mm (Fig. 6A–F, Supplementary Movies S3, S4 and S5).

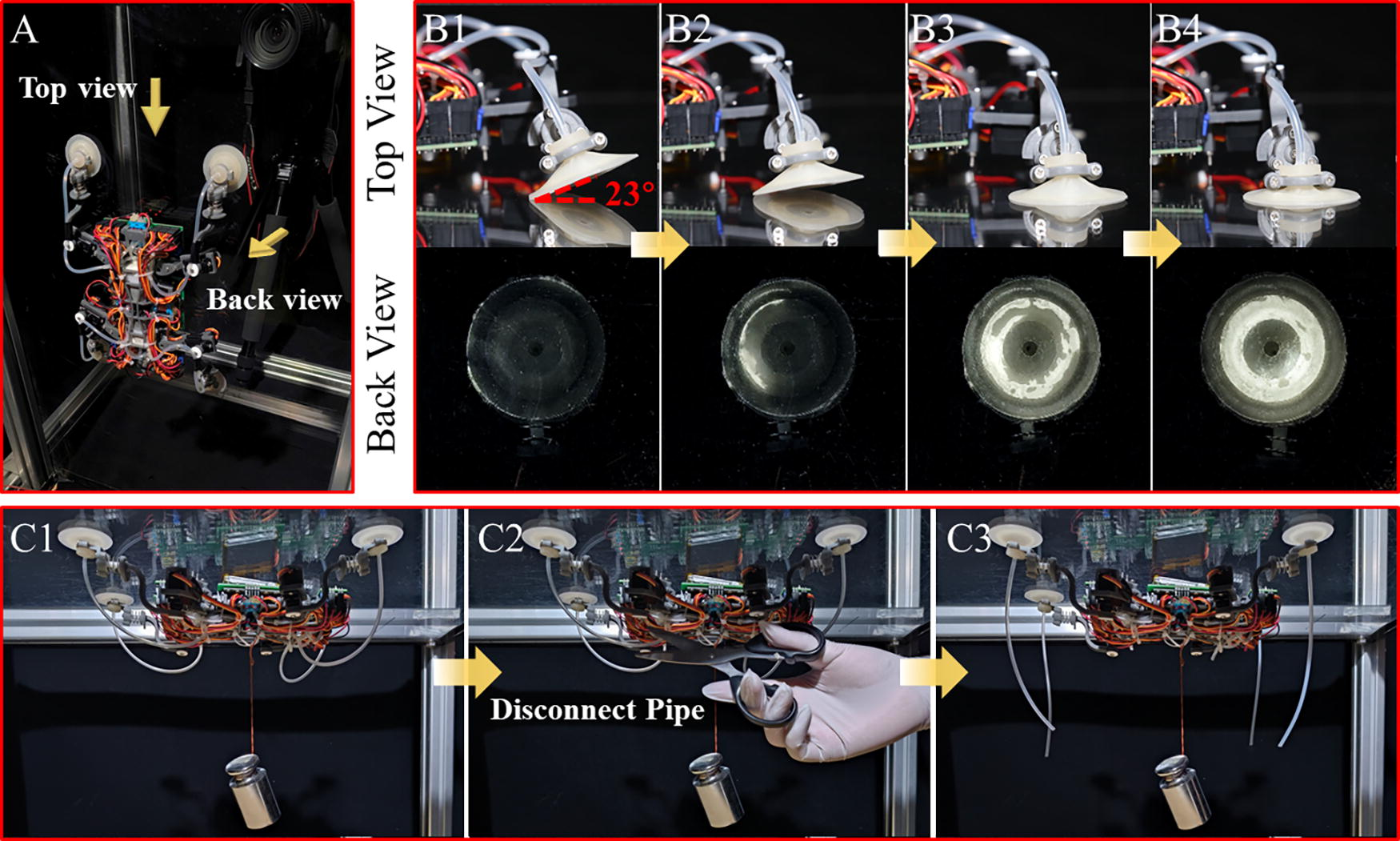
Functional demonstration of climbing robot.
Emphasis was placed on the robot’s 90° vertical climb, and the exemplary performance of the SAS was highlighted from two distinct perspectives (Fig. 7A). The top view illustrates the adaptive utilization of the SAS in the LF, ensuring a stable climate. Due to its soft-body structure, the SAS can effectively adjust its shape and posture when the contact angle changes. In contrast, conventional rigid-body-driven adhesion mechanisms rely on external adjustment and control.58,59 The application of negative pressure ensures that the contact area remains horizontal, which is often absent in adhesion mechanisms. The back view illustrates the role of the adhesive material on the SAS membrane during the LF operation (Fig. 7B). The importance of redundancy protection for robots has been emphasized in practical operations. SAS provides a climbing robot with an additional passive hovering capability. As illustrated in Figure 7C, even with the pneumatic system of its four legs disconnected and a 0.5 kg weight suspended, the robot firmly adhered to a 180° inverted surface utilizing the vdW force of the SAS (Supplementary Movie S6). Moreover, the robot demonstrated the ability to maintain adherence to an inverted surface for more than 50 min without power or an additional load (Supplementary Movie S7). This design not only enhances the reliability and durability of the robot but also provides augmented safety assurance.
Adaptability and robustness of climbing robot.
Compared with existing research on climbing robots, as shown in Supplementary Table S6, our study demonstrates comprehensive climbing capabilities across various surface shapes. However, our robot shows reduced adaptability on rough surfaces due to limitations in the adhesive material’s performance. Future research will focus on enhancing the SAS’s adhesion across a broader range of surface textures to improve operational versatility further.
Conclusion
This study synergistically integrated the biomimetic characteristics of octopus vacuum suction and gecko foot adhesion utilizing their respective advantages to design and fabricate an adaptive and robust SAS. It achieves rapid adhesion through the self-driven preload on various surface shapes.
Under a negative pressure of −40 kPa, the mechanism synergistically harnesses vdW and vacuum suction forces, producing a normal synergistic force of 26.9 N that exceeds the individual contributions of each force. Even at ambient pressure, the adhesive material produced a maximum normal adhesion force of 8.7 N and a tangential adhesion force of 4.5 N. Demonstrating robust adhesion and detachment capabilities on various surfaces, the design is effective from flat to concave and convex geometries. At a positive pressure of 20 kPa, the SAS detached from the flat surface with less than 0.1 N of additional detachment force. Based on SAS, we developed a climbing robot capable of stable crawling on various surfaces, including inverted, vertical, concave, and convex. In particular, the SAS enables the robot to remain stable on vertical or inverted surfaces for an extended period even in the absence of power, which significantly improves the reliability and durability of the robot.
As the range of applications expands, the need for adaptable end effectors, particularly those that require robust and reversible adhesion, increases. This highlighted the importance of developing efficient, simple, and energy-efficient adhesion mechanisms.
Footnotes
Author Disclosure Statement
The authors declare no conflicts of interest.
Authors’ Contributions
C.X.: Conceptualization; Zhiyuan W. and Zhouyi W.: Methodology; Zhiyuan W., Zhouyi W., C.X., and Q.Y.: Data analysis; B.W., Y.D., J.Y., and P.Z.: Investigation; Zhiyuan W., Zhouyi W., and W.Z.: Visualization; Zhiyuan W.: Writing—original draft; Zhouyi W., Q.W., and Z.D.: Writing—review & editing; Funding acquisition: Zhouyi W. and Z.D.
Funding Information
The National Key R&D Program of China (2023YFE0207000). National Natural Science Foundation of China (Grant Nos. 51975283 and 62233008). Research Fund of the State Key Laboratory of Mechanics and Control for Aerospace Structures (Grant No. 1005-IZD2300225). Guangdong Basic and Applied Basic Research Foundation (2023A15150100773).