
Abstract
Abstract
The pressurized space suit is an essential enabler for human exploration and eventual settlement of space. A key problem is reducing resistance of the suit to movements of the human occupant. In 2007, NASA sponsored the Astronaut Glove Centennial Challenge which sought non-traditional competitors who could create better gloves than NASA's own state-of-the-art. The winning gloves were developed and built by the author on his dining room table. This and later developments followed a process that is different from most aerospace programs in that it emphasized iterative hands-on build-test-learn cycles over more traditional design and analysis cycles, yet produced significant innovations in glove flexibility, bending resistance compensation, and ability to fabricate custom-patterned (bespoke) gloves with less effort than standard-sized gloves. Gloves incorporating this technology have demonstrated twice the flexibility of current designs which allows higher suit operating pressure and “zero pre-breathe” extravehicular activity. These developments are directly applicable to the larger joints of a space suit. The author is applying the knowledge learned to develop space suit pressure garments for the revolutionary rocket company SpaceX.
To be useful a space suit needs to have decent mobility. A launch and entry suit is personal protective equipment that is a backup to the backup systems of a space ship in the event of loss of cabin pressure. Its primary function is to maintain a bubble of survivable environment around its occupant until they can return to safety, although it is hoped to never be used for that purpose and so pressurized mobility is usually pushed down on the list of priorities. In contrast an extravehicular activity (EVA) suit is meant to be used as often as everyday, and for durations of 8 h or more at a time. Beyond providing all the basic functions of a space suit—life support, nourishment, and utility to the occupant—the main purpose of an EVA suit is to allow the occupant to perform physical activities in the space environment. There is no need for a human to be exposed to the space environment outside of a ship or habitat other than to be able to use their body (in conjunction with their mind) to perform tasks that cannot be effectively performed by machines or that could not be anticipated in advance. Therefore, the primary objective of EVA suit design must be to allow unencumbered movement of the human occupant.
What I experienced the first time I put my hand inside a pressurized space suit glove was not at all what I expected. At the introductory meeting for the first Astronaut Glove Challenge there was a glove box containing gloves from National Aeronautics and Space Administration's (NASA's) current EVA suit, the extravehicular mobility unit or EMU. Because the pressure differential is low in engineering terms (4.3 psi), I expected the gloves to be soft and pliable. In fact the effect of pressure on the fabric and polymer layers of the glove makes them rigid and unyielding. Years later I learned that a standard indoor volleyball is inflated to about the same pressure as the EMU so if you can imagine how the inside surface of a pressurized volleyball would feel you get the idea. As I flexed my fingers I noticed that folds on the inside of the glove joints would dig uncomfortably into my flesh and I could feel increasing resistance the more I bent my fingers, I also noted that certain degrees of freedom were greatly limited or absent altogether. For example, there was virtually no ability to bend my hand at the knuckles—making a fist is one of the most difficult things to do in the EMU glove. In all I had 5 min of time using the glove box but it made a lasting impression about how much the gloves could be improved.
I was between aerospace careers when I learned about the NASA Centennial Challenge. It offered a cash prize to anyone who could produce a working pair of pressure-capable gloves that outperformed the Phase VI gloves used on the EMU. I had worked on military and commercial space projects for many years but had no direct experience with human space flight. I decided to enter the glove competition mainly as an outlet for technical creativity—I had been away from design engineering for some time and it seemed like a fun hobby-type project. There was no expectation of winning but at the same time I wanted at the least to do well enough to not make a fool of myself.
While the challenge was related to gloves, it was understood from the start that the glove is an analog for an entire space suit, with finger and thumb joints being miniature versions of elbow/knee and shoulder/hip joints. What works for improving glove comfort and mobility could also be scaled up to deliver improved performance of a full space suit pressure garment.
Technical information about space suit design was not readily available so I had to learn the basics on my own. Once I began to build and test my first prototype joints the learning curve was steep. It did not take long to learn that fabric under pressure does not act in the same ways as other materials. Fabric is a nonlinear, orthotropic material. It can only be loaded in tension and the stiffness properties along the diagonal can differ by orders of magnitude from the principle axes defined by the interwoven threads. In addition, woven material has a “shape shifting” quality where the thread orientations can distort and reorient as a result of localized loading. This characteristic is not necessarily bad as local distortions can help to redistribute load concentrations. But it does result in pressurized fabric acting in nonintuitive ways. My first attempts at making gloves yielded shapes that were hardly recognizable as a hand once they were pressurized. It became clear that the details about how the pieces that make up the glove are patterned and oriented were going to be as important as making strong seams.
Six weeks before the Astronaut Glove Challenge I concluded that none of my radical ideas were going to come together in the short time that remained. Faced with the prospect of not having anything at all to enter (and thus losing the entry fee that I had already paid), I shelved all the grand plans and focused on just one essential question: how could a tube of fabric be made rigid enough to support the loads of internal pressure while simultaneously being pliable enough to allow the tube to bend easily? There was no time for paper studies so, with no facility and almost no budget, I set up a sewing machine on my dining room table and got to work. My initial test apparatus consisted of a pump bulb and gauge from a blood pressure cuff connected to some PVC pipe fittings, with which I could inflate a finger joint prototype and see how easily it would bend. It should be noted that I had no knowledge of what constituted “easy to bend” and so I proceeded on a quest to simply do the best that I could. After a flurry of build-test-learn cycles and the creation of close to thirty different “finger” prototypes a basic concept emerged. It would take dozens more iterations to refine just that finger joint into its present configuration. In <3 weeks the basic finger joint design was expanded to encompass four fingers, then a knuckle joint, next a thumb, then a wrist, and finally all of those components joined together as a complete glove assembly. With each build, I adjusted patterns based on trial and error to try to produce something that approximated the shape of a human hand when pressurized. Lack of time forced me to streamline the way in which the pieces were fabricated and joined. The first complete glove was finished just 2 days before the competition. After a very brief confirmation test using a bell jar as a glove box, a second glove was built from scratch. There was no time remaining to determine what my gloves were capable of, nor did I have any way of knowing how well other competitors' gloves would perform.
My entry in the Astronaut Glove Challenge did win, by the slightest of margins. The prize money enabled me to set up a work space and establish a business named FLAGSUIT in recognition that developing space suits was the ultimate goal, not just making gloves (the name is a mashup of the acronym for Fits Like A Glove and the word “suit”). Over the next few years I continued to develop and improve upon the original joint design. Most of this work was self-funded, with the help of some matching grants from Maine Technology Institute. I also collaborated on a few projects with commercial space companies including Orbital Outfitters, which was founded specifically to create and produce commercial space suits. By the time the final round of the Astronaut Glove Centennial Challenge came up, the FLAGSUIT gloves had matured considerably and were capable of more than twice the flexibility of both the winning design from the first competition and also the benchmark Phase VI EMU glove (Table 1). A big improvement in flexibility came from realizing a way to use suit pressure to generate forces that counteract joint bending resistance. Decoupling joint torques from suit pressure removes the need to keep suit pressure low to maintain reasonable mobility (Figure 1). This enables doubling the suit pressure to 8.3 psi without any increase in hand fatigue compared to present gloves, which allows EVAs to be performed without having to spend time purging nitrogen to prevent decompression sickness. A “zero prebreathe” suit has huge operational advantages over present day EVA procedures. To prove this out prototype gloves and arms were tested in a full vacuum glove box and demonstrated good flexibility even at 14.7 psid (Figure 2).
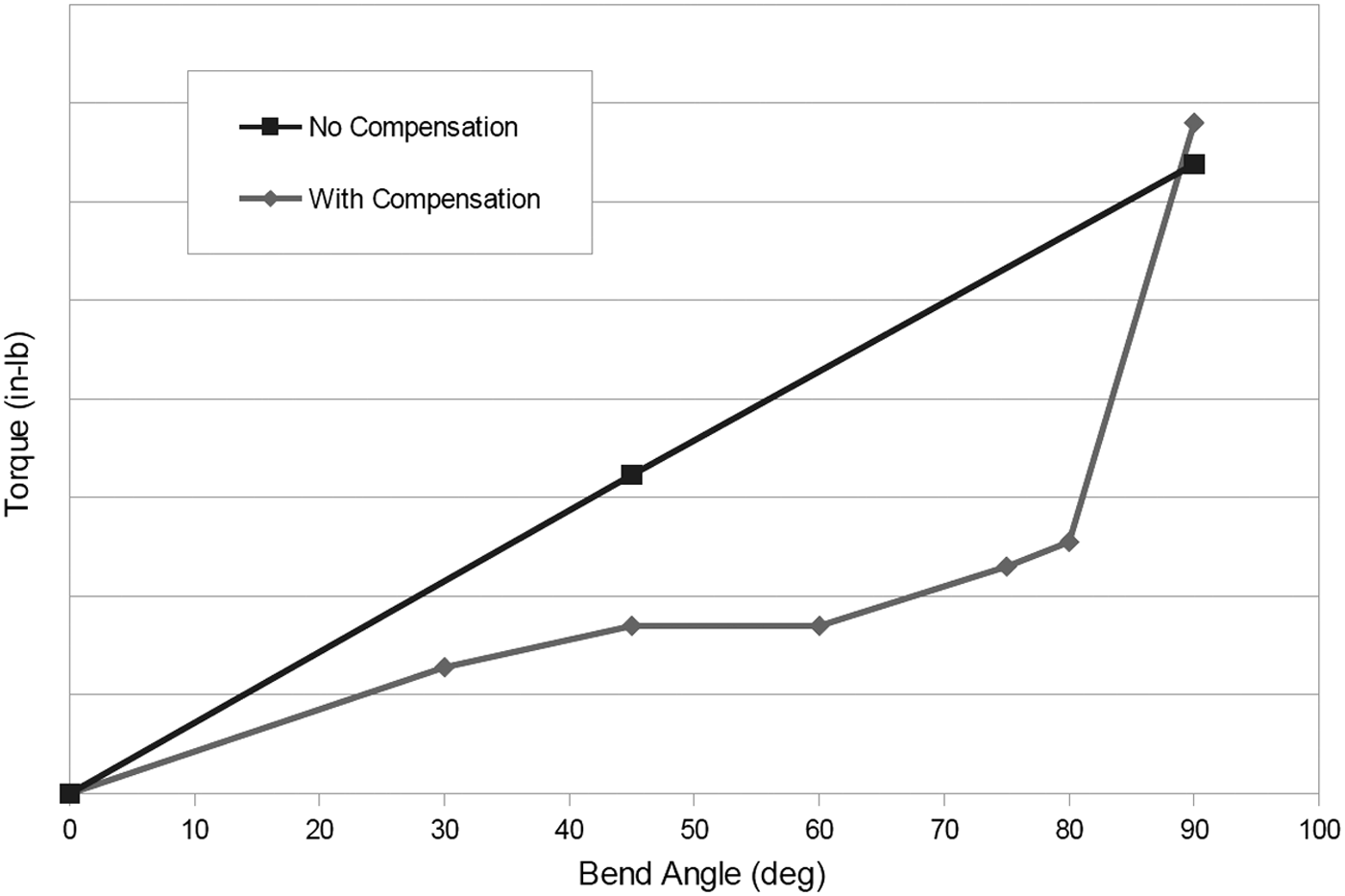
Comparison of Bending Resistance of a Pressure Suit Joint With and Without Torque Compensating Feature. Plot of bending resistance (torque) versus angular displacement for a simple flat-pattern convolute joint at 5.0 psid with torque compensation (diamond), and without torque compensation (square). Bending resistance for the unassisted joint increases linearly with increasing bend angle. With torque compensation, bending resistance is reduced overall and remains nearly constant over a large range of displacement.

Torque Compensation Implemented in Wrist and Finger Joints. Torque compensating joints exhibit a wide “neutral range” of positions. The upper panels show fingers remain open and closed, and lower panels show different stable wrist positions. There is no centering tendency so the joints remain where placed anywhere over a large range of angular positions. This results in much less hand fatigue when performing manual tasks, even at higher suit pressures. Torque compensation can be used in the larger joints of a space suit with similar results. The gloves in the photos have standard Extravehicular Mobility Unit interfaces and were capped and pressurized to 8.3 psid; there is no hand inside of glove. Photographs courtesy of P.K. Homer.
Relative Flexibility of FLAGSUIT Gloves Compared to National Aeronautics and Space Administration Extravehicular Mobility Unit Baseline
Glove Bending Torque Comparison. Showing progress in achieving lower bending torques/higher operating pressures. These scores represent overall glove flexibility based on test data from actual gloves using the Astronaut Glove Centennial Challenge formula. A lower Combined Score represents less bending stiffness, therefore greater mobility. The 2011 glove exhibits flexibility similar to the NASA EMU glove, while pressurized to nearly twice the pressure. Glove stiffness has been a primary factor in limiting EVA operating pressure of past suit designs. More flexible gloves enable a “zero prebreathe” suit to be utilized for future EVA activities.
Scores computed using scoring methodology of NASA Astronaut Glove Centennial Challenges.
EMU, extravehicular mobility unit; EVA, extravehicular activity; NASA, National Aeronautics and Space Administration.
After the Centennial Challenge I was invited to exhibit at the Folk Life Festival, a public showcase on the Mall in Washington, DC. I brought a working glove box containing four gloves that were identical except for their sizes (extra large, large, medium, and child size) so that visitors young and old could get a hands-on experience of how it feels to wear a space suit in space. Over 2 weeks an estimated twenty thousand people came through the exhibit and a curious pattern emerged. Rather than trying just the glove that was closest to their size, people would try out all of the gloves in the box then declare that one of them was much easier to use than the others. At the time this struck me as odd since I knew all the gloves were made using the same materials and design, and were operating at the same pressure. After the show I finally got a chance to try all of the gloves for myself and sure enough, the one that was made from my own hand measurements clearly felt much easier to use than the others. This brought home the importance of having the proper fit not just of the overall lengths and girths, but importantly the distances between the bending joints too (my gloves have discrete bending joints rather than distributed bending as in the EMU glove). What I realized was that when the suit joints are aligned with the human joints then the suit moves with the body. Conversely when the suit and human joints are not well aligned the suit resists movements of the body. All else being equal, the importance of aligning all of the kinematic joints between suit and a suited person cannot be overstated. I rate it equally as important as reducing bending stiffness of the suit joints in providing effective mobility of the suited human.
Achieving effective kinematic joint alignment can be accomplished using adjustable elements such as straps, or by building the suit using customized patterns to fit each individual wearer. The latter approach was used for the suits that walked on the moon during the Apollo missions. These bespoke (custom made for each astronaut) resulted in a cleaner and simpler design but at a high cost. When prioritized from the start, however, a fully custom fit of both bladder (gas impermeable) and restraint (structural) layers can be achieved at minimal additional effort beyond the taking of a few more body measurements. To keep things manageable and capable of scaling up to full suits, I was determined to not use expensive methods like 3D body scanning. Instead, a simple process was developed using measurements taken from tracings of the hands (www.Flagsuit.com/sizing/HandSizer_v3.pdf). Only about a dozen relatively simple hand measurements are needed, and the complete process from taking measurements to production of custom gloves was tested in-house with great results. Thus, a fully custom pair of gloves (and even different sizes for the left- and right-hand gloves) can be produced economically compared to standard-sized gloves, with a marked improvement in manual dexterity and comfort.
Another way to control the cost of bespoke suits is to automate the pattern customization process. There is an initial (nonrecurring) investment in setting up the system but eliminating the need to fabricate adjustability features on every unit results in rapid pay back. From the beginning my gloves were developed with an eye toward being mass produced without incurring a huge penalty. This approach was driven in part by the need (in early days) to do all of my own manufacturing. The cost savings were confirmed in the course of producing prototype gloves for NASA under a contract that required the inclusion of length adjustment elements on the fingers. The added work of fabricating and integrating these adjustment features nearly doubled the amount of labor compared to producing just the basic gloves using a customized set of patterns. In other words, from a recurring cost standpoint two or even three custom-fit gloves could be produced for same build effort as single “standard” size glove with adjustable elements. Even if the fit of the bespoke glove needed to be fine-tuned to fit better it would still be more economical to build the second glove than to have made a fit-adjustable one, with improved performance and simplicity. These developments transfer readily to full suit production so that flight-ready bespoke suits can be manufactured in months rather than years.
Another decision that was made early on was to seek performance improvements through design rather than relying on exotic manufacturing capabilities or new materials that did not already exist. Once again the initial drivers were a lack of time and resources with which to develop new materials and processes, but keeping things simple has other benefits. Space suits will ultimately be placed into service off the planet and the current model of returning suits to Earth for repair and refurbishment will not be practical. Choices in materials and fabrication methods will be informed by the prospects of off planet repair and even new suit production in situ.
My path into the space suit design world was unconventional but I am driven now to do what I can to help colonize other worlds and make mankind a multi-planetary species. Each of the stepping stones along the way have informed and validated (or in some cases invalidated) my choices, but I understand that there are many ways to meet requirements so these are not presented as the best but rather as one of many possible solutions. It won't be long before the first of the new commercial space suits are revealed to the public. It will be interesting to see what new innovations they will incorporate.