
Abstract
Abstract
The emerging market of Commercial Space Transportation (CST) is not only developing efficient and cost-effective access to space but also fostering new concepts of passenger transportation. As an effect, an increase of spaceflights and suborbital launches can already be observed over the past years and further growth is expected. The same applies to the number of spaceports for launch and landing operations of space vehicles (SVs) worldwide. That said, SVs will more frequently pass through civil airspace and will evolve from rare special events to regular airspace users. The need for a safe and efficient integration of SV operations into the air traffic system is evident. Considering concepts of very high-speed intercontinental passenger transport via suborbital point-to-point flights, this integration issue is becoming even more relevant. Air Traffic Management (ATM) is playing a key role in the effort to ensure a sustainable CST system. The ATM integration concept has to follow a common approach that can accommodate all different types of commercial SV operations. It must be flexible and resilient enough to handle the uncertainties of launch and reentry events, and it has to provide measures to cope with a target level of safety for spaceflights which is still significantly lower compared to commercial airplanes. It has to be the goal to integrate all operations into one system to ensure a seamless and efficient approach. This article describes the necessary evolvement from the current state of the art of integrating spaceflight into ATM to a concept that facilitates the requirements of trajectory-based operations under the regimes of future Single European Sky and the U.S. Next Generation Air Transportation System. It shows how dedicated CST services for the System Wide Information Management can facilitate an interoperable ATM integration. To study the effects of SV operations on air traffic and to evaluate mitigation strategies and optimized ATM integration, a case study design, based on a point-to-point suborbital intercontinental passenger transport concept, will be presented.
Introduction
To briefly summarize the current development of Commercial Space Transportation (CST), the core assumption is that commercialization in space will lead to reduced costs and increased number of operations. This is already reflected by the number of commercial launches, which has significantly increased over the past decade
1
:
• Commercial launches prior 2008 totaling maximum 5 per year. • Commercial launches in 2014 = 23, 2015 = 22.
With the developing interest in the emerging market of commercial space operations, the number of commercial launch sites (so-called spaceports) is as well growing on a global level. In 2016, there were already 19 active U.S. government and commercial launch and reentry sites, of which 10 were licensed commercial launch sites, with 3 additional non-licensed sites. In addition, 16 non-U.S. orbital launch sites are in operation worldwide. 1 In the United Kingdom, evaluation of possible spaceports is in progress (currently five sites are shortlisted). 2 The British Government recently announced its Modern Transport Bill, which intends to “set […] the framework for the UK's first spaceport and autonomous vehicles, paving the way for commercial spaceflight and drone operations in the UK and boosting our world-leading satellite industry.” 3 Worldwide, additional sites are under consideration or even evaluation, for example, in Spain (Lleida Alguaire/Barcelona), Singapore, Curacao, Italy (operated by Italian Air Force), and Germany.
With higher numbers of flights and a wider distribution of launch sites, reentry locations, and areas of operation (specifically considering the suborbital portion of spaceflight), the effects and interaction between space operation and regular air traffic have to be considered more extensively and on an increasingly international level.
This study, therefore, starts with a categorization of space vehicle (SV) operations that are relevant for Air Traffic Management (ATM). It then analyzes the challenges associated with their integration into ATM. An approach is described on how modern service-oriented information management may be used to help addressing these challenges. To analyze and validate such concepts for optimized space and air traffic integration, an adequate testing and evaluation framework is required. The study shows how such a framework has been set up in support of a case study approach for the analysis of traffic impact and integration concepts for specific types of SV operations.
Types of SV Operation Relevant to Atm
To further analyze the impact of specific types of SV operation on the air traffic system and to develop mitigation and optimization concepts, the launch and reentry trajectories of SVs have to be identified, categorized, and described. As a result, the following types of operation have to be considered relevant for ATM integration:
Conventional Land- or Sea-Based Rocket Launch Operation
This covers typical vertical rocket launches from launch pads at land or—rather seldom—at sea (e.g., launch of Zenit-3SL rockets from sea launch platform operated by Sea Launch 4 ) with multiple stages, for insertion of spacecraft into the Earth's orbit or beyond.
Air-Launched Rockets to Orbit
As an alternative multistage to the orbit launch concept, the rocket is carried aboard a carrier aircraft and launched in air at already high altitudes (e.g., Pegasus XL, 4 launched from a Lockheed L1011 at altitudes of about 40,000 ft). In addition to the rocket trajectory also carrier airplane operation and the designated in-air launch site have to be considered.
Deorbiting SV
This refers to typical reentries from low Earth orbit missions. Two general types of reentry vehicles have to be distinguished: classical reentry capsules, which depend on parachutes to perform their atmospheric part of the reentry trajectory, therefore requiring a rather large area of destination; and flying orbiters with conventional unpropelled landing capability (e.g., Space Shuttle or lifting bodies such as the DreamChaser). Flying orbiters usually approach a designated landing site and use a rather conventional runway to end their flight. Such a runway can be located at specifically designed spaceports and might as well allow mixed operations with regular air traffic. The length of their return trajectory might be larger than 5,000 NM, but only the last segment of it is carried out within controlled airspace. Depending on the vehicles' individual deorbit and approach profile, the extension of the trajectory segment that is relevant to ATM varies and is not only limited to the part that lies within controlled airspace (see section Impact and Challenges of Commercial Space Transportation on ATM).
Suborbital Flights
Vehicles performing suborbital flights typically are addressing zero-gravity research, space tourism flights or act as a first stage carrying a (small) satellite to be launched via an additional upper stage rocket. Their basic operational characteristics are:
• Depart and Arrive at same runway/spaceport. • Maneuver in relatively close vicinity of airport. • Duration of flight ∼30 min.
Variations to these characteristics may exist, for example, suborbital flights for the purposes mentioned earlier, which will land at a different location than being launched.
There are currently several vehicle concepts under development. The flight characteristics depend on the specific concept of each vehicle and, therefore, can vary. The following flight scenarios apply to the most established suborbital concepts:
• Single-stage rocket plane (e.g., XCOR Lynx): High Speed Launch under rocket power; allows multiple firing; returns as glider. • Rocket plane launching from carrier plane (e.g., Virgin Galactic Spaceship2, SwissSpaceSystems S3): Conventional takeoff, release, and rocket firing away from airport; single fire; SV returns as glider. • Hybrid turbofan/rocket plane (Airbus Spaceplane, Rocketplane): Behaves similar to conventional aircraft in controlled airspace; rocket firing away from airport at high altitudes; returns under power (turbofan restart during approach).
With the BlueOrigins “New Shepard” system,1,5 there is also a suborbital vehicle concept that is based on a vertical liftoff and, therefore, also provides a slightly different flight profile (vertical launch and landing with additional capsule return).
Suborbital Point-to-Point Travel
Using suborbital flight trajectories, these kinds of vehicles travel outside of the atmosphere to provide ultra-fast hypersonic air transportation, for example, connecting Europe to Australia within 90 min of flight. As such, they are considered a very specific kind of suborbital SV operations. Their operational characteristics are:
• High altitude, suborbital, hypersonic flight profiles. • High-speed (intercontinental) connection, for example, Europe–Australia in 90 min. • hmax = 260.000 ft, vmax = Mach 20.
There are several concepts under research and development, including
• Later development stages of suborbital vehicles (S3, Virgin, …).
• JAXA Hypersonic Passenger Aircraft.
• DLR SpaceLiner (DLR-RY-SART).
Additional Relevant Space-Related Operations
In addition to launch and reentry operations that can interfere with ATM as already described, variations of those operations or other type of events have as well to be considered regarding their impact on the air traffic system:
• Returning first stages (e.g., SpaceX Falcon 9 first stage, SpaceLiner booster stage [winged RPV-like return to launch site]). • High-altitude operations such as stratosphere balloons or fixed-wing platforms for research, reconnaissance, communication, and/or space tourism. • Space debris and Meteoride atmospheric (re-)entry that requires debris-related hazard area determination and mitigation procedures, for example, closure of large portions of airspace.
Impact and Challenges of Commercial Space Transportation On Atm
During all phases of the spaceflight through or close to above controlled airspace, separation between aircraft and the SV, including its potential hazard areas in case of malfunctions, has to be assured. Most of the launch and reentry flight trajectories require only a relatively small size of restricted airspace surrounding the launch- and landing sites to remain clear of the SV (whereas the size and shape of the restricted airspace is dependent on the applied type of launch and reentry operation, as described in Types of SV Operation Relevant to ATM). Those kinds of restrictions have to be in place over the duration of the launch or reentry operational window and cover a vertical area from the surface to an unlimited altitude.
In addition to that, a much larger portion of air space has to be managed regarding the risk of non-nominal events, for example, falling debris from an in-flight explosion or a breakup event. The resulting fragments can cover a relatively large area, depending on the velocity and altitude of the vehicle during its disintegration. 6
So-called Hazard Areas have been introduced to extend the area protecting the surrounding aircraft beyond the pure SV separation area or operating zone (Fig. 1). Their size is calculated by a debris dispersion prediction against an acceptable risk threshold (which is related to public safety standards). A hazard area's lateral extension is accordingly determined, by using a fragmentation model that is specific to the individual SV. The vertical extension of the hazard area typically reaches from ground to FL600 (and beyond) throughout regular airspace. The top ceiling might be reduced, for example, for a reentering SV when it already has reached lower altitudes.
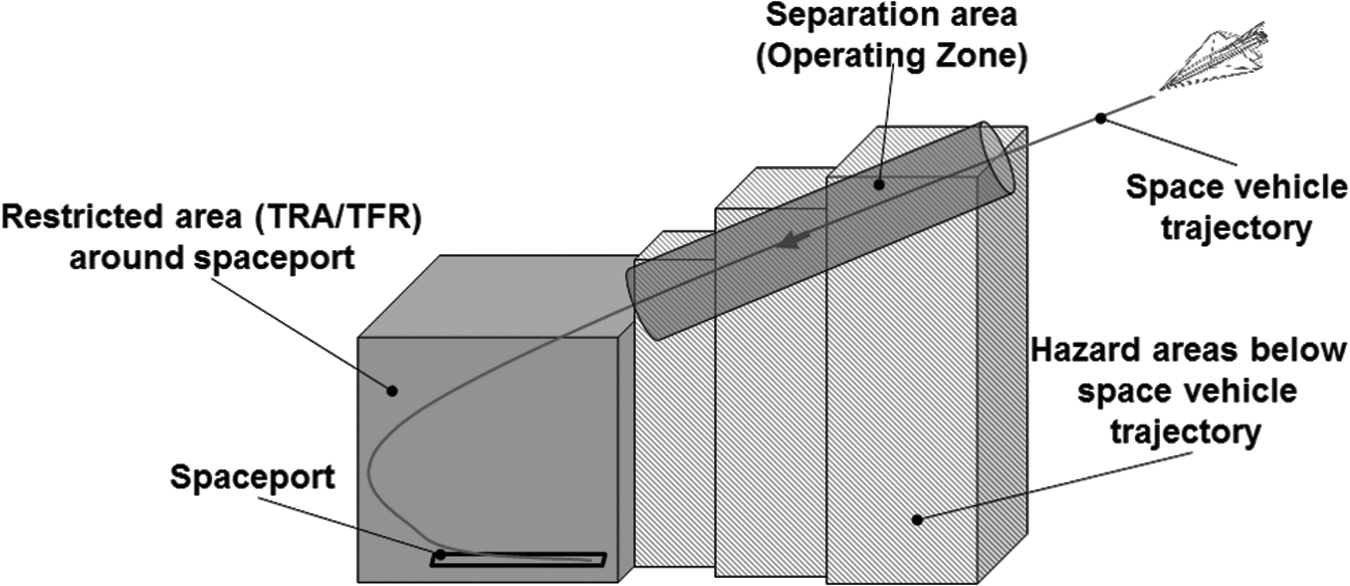
Simplified schematics of restricted areas, separation areas, and hazard areas related to a space vehicle trajectory (during reentry). TFR, temporary flight restriction; TRA, temporary reserved airspace.
Hazard areas are also limited in time, which means that they are active at the actual position of the SV on its trajectory, whereas they have to be as well considered for air traffic planning and control significantly before the actual flight event. The effective period of a given Hazard Area extends from the time that the first fragment of hazardous debris will enter the Area to the time that the last fragment of hazardous debris will exit the bottom of it.
To ensure the safety of airspace users during SV operations, airspace restrictions have to be put in place. On the other hand, unnecessary durations of closed airspace segments can affect the air transport system significantly, as has been shown for the U.S. airspace during Space Shuttle reentry operation. The operating zone has to be clear of any other aircraft, whereas the airspace below or in the vicinity, covered by the hazard area, “should remain open for normal air traffic operations, provided that an operational plan is in place to notify airspace users in advance and provide air traffic controllers with the necessary information to appropriately address a potential accident.” 7
As size and duration of the hazard area is significant for the effect of SV operations on the air traffic, research is currently analyzing their impact, 8 related separation concepts9,10 and optimizing hazard area sizes, shapes, and activation through better predictions and risk calculations such as the compact envelope method, introduced by Colvin and Alonso.11,12
The technical nature and current constraints of space operations are also challenging the ATM in other ways:
• SVs challenge the established Communication, Navigation, and Surveillance requirements as they cannot get tracked by conventional air traffic control (ATC) surveillance. They are not equipped with conventional transponders, and the capability of current systems to handle high supersonic aircraft speeds is unclear. ATC and the air traffic controller's tools and working positions are not yet prepared to handle SVs. No automatic tracking and display of SVs are available within regular ATM systems, although newest developments already have improved the distribution and prediction of ATC-relevant data, as demonstrated by the U.S. Federal Aviation Administration (FAA) Space Data Integrator tool.
13
• SVs are operated under a significantly lower target level of safety than commercial airplanes; therefore, mishaps and debris-generating events have to be considered for regular operations. • Gliding approaches and high approach speeds will require prioritized handling of SVs and would stress airport approach operations for those flights. • Highspeed point-to-point flights might not be handled by conventional sectorized airspaces. • Trajectory prediction is essential for an efficient integration of SVs into an ATM concept applying Trajectory-Based Operations (TBOs), although TBO might especially facilitate the integration process under application of System Wide Information Management (SWIM)-related services.
INTEGRATION OF SVs OPERATIONS USING SWIM
For efficiently integrating SVs into ATM, its implementation has to be as predictable as possible to allow for optimized planning and air traffic route optimization in preparation of an SV flight. Situational awareness for all relevant stakeholders before, during, and after the relevant flight phases is crucial to allow for timely reactions and sound decision making during a nominal flight and in case of off-nominal events. The ongoing transition of ATM toward TBOs under the regimes of the Single European Sky (SES) and the U.S. Next Generation Air Transportation System (NextGen) can help in fulfilling the aforementioned requirements.
Improved Predictability of Air Traffic with TBO
TBO is the concept of improving throughput, flight efficiency, flight times, and schedule predictability through better prediction and coordination of aircraft trajectories. 14 Shifting air traffic operations from clearance-based ATC to trajectory-based ATC, TBO is based on the use of a 4D trajectory for each aircraft, which precisely describes the flight of an aircraft in space and time.
In the context of flight planning in the TBO-based ATM environment that has been developed within the Single European Sky Air Traffic Management Research (SESAR), early planning, in principle, can start from years to 6 months before departure, using a so-called Business Development Trajectory (BDT). From 6 months to hours before departure, the planning phase turns into the Shared Business Trajectory (SBT), which is used for refinement and negotiation between the ATM stakeholders. In the execution phase, it becomes the Reference Business Trajectory (RBT), which is then subject to authorization, revision, and updating. The BDT is user internal only, whereas SBT and RBT are shared by all ATM participants.
RBT revisions are mainly driven by inabilities to fulfill RBT constraints or events, causing a need of change. Operational constraints can also drive a revision, for example, airspace segregation. When not under time critical conditions, RBT revisions are the subject of a collaborative process, aiming at managing disturbances in the most flexible manner possible.
Within SESAR, the basic idea behind using business trajectories as part of a flight planning and execution process is to allow airspace users to agree on a preferred trajectory with Air Navigation Service Providers and airport operators. The terminology and certain definitions differ between the SESAR and NextGen concepts, whereas the basic elements and technological enablers are very similar, which is essential not only with regard to the interoperability of international air traffic operations but also for the proposed approach on implementing SVs into the ATM.
One of the key elements of SESAR to support the business trajectory concept is the SWIM. It can be seen as an intranet for ATM, aiming at providing all relevant information at the right time and with the right quality to the right stakeholders. SWIM is based on a net-centric approach for connecting multiple stakeholders, each running its own information system, and using SWIM to communicate. It consists of standards, infrastructure, and governance enabling the management of ATM information and its exchange between qualified parties via interoperable services. On a technical level, SWIM uses a Service-Oriented Architecture.
The combination of structured flight trajectory planning, revision, and execution, based on multi-stakeholder collaborative decision making, with an information architecture that provides timely information throughout the whole air traffic system is an ideal prerequisite to implement SVs as additional airspace users on a planning and execution level. Launch and reentry operations are planned well in advance, allowing for timely and thorough information sharing and implementation for required restrictions (related airspaces and control zones). The communication of hazard areas and airspace restrictions can already take place in the early planning stages. It will then be refined when approaching the day of operation and might require updates on relatively short notice and throughout the whole air traffic system. It has to include Air Traffic Flow Management and flight operation planners from all stakeholders as well as Pilots and Air Traffic Controllers. Pre-Flight Preparation tools, in-flight updates, and ATC systems have to be incorporated into the information-sharing process. As the future SESAR SWIM “Intranet for ATM” concept requests all the air traffic participants to act as the communicating sub-system, SV operations have to be taken into SWIM consideration for fulfilling this ATM integration need.
SWIM-Based SV Integration Prototype
Within Ref. 15 an approach for an efficient implementation of SV operations into air traffic planning and management based on an information service solution has been proposed. The concept is based on the handling of local and global disturbance of air traffic, and it facilitates the use of Aeronautical Information Management (AIM). As a first prototype (Fig. 2), one of several required services has been developed as a usability demonstrator.
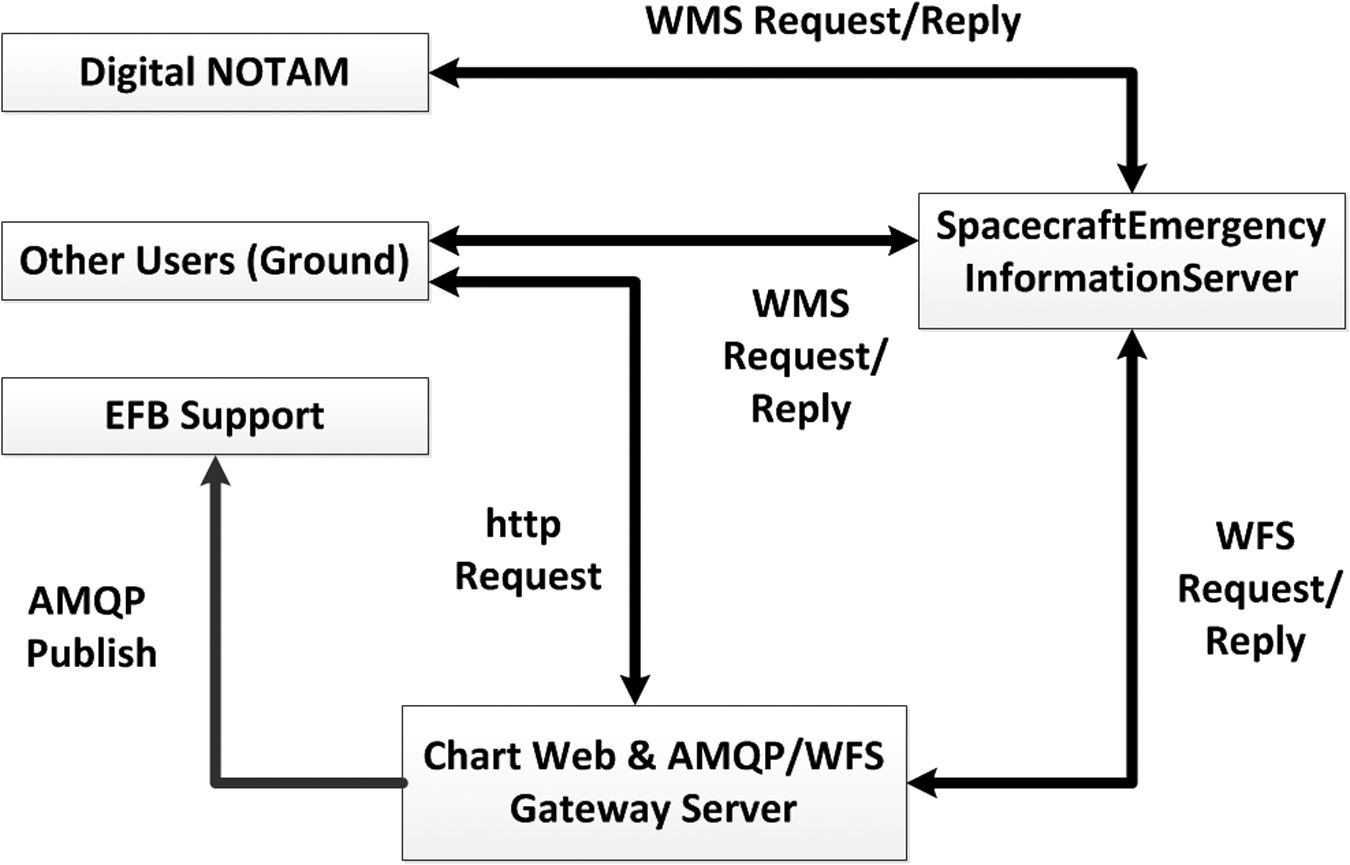
General approach for the provision of HazardArea information via SWIM by using a SpacecraftEmergencyInformationServer. 15 AMQP, Advanced Message Queuing Protocol; EFB, Electronic Flight Bag; NOTAM, Notice to Airmen; SWIM, System Wide Information Management; WFS, Web Feature Service; WMS, Web Map Service.
Within this concept, a so-called SpaceCraftEmergency InformationService will provide up-to-date HazardArea information for each actual location of a flying SV. The Spacecraft Emergency Information Provider (e.g., SV operator) hosts the SpaceCraftEmergencyInformationServer. The Space CraftEmergencyInformationService implements the Web Map Service (WMS) and the Web Feature Service (WFS) to conform with the Open Geospacial Consortium standards.
Interested stakeholders can then access this information, for example, as connected ground users or via digital Notice to Airmen (NOTAM) services, both via WMS Request/Reply web service consumption. Users outside of a SWIM environment can use http request to a chart web server. Provision of information to onboard users can be achieved via an Electronic Flight Bag (EFB) by using a WFS to Advanced Message Queuing Protocol gateway server.
SESAR/NextGen Interoperability for SV Integration
DLR and Embry Riddle Aeronautical University (ERAU) have expanded the idea of this concept regarding general NextGen/SESAR interoperability aspects, allowing the provision of data and services across both ATM concepts facilitating SWIM. 16 The alteration demonstrated the connection to the FAA concept of Global Enterprise Messaging Service (GEMS), where Service by Next Generation ERAU Applied Research (NEAR) is one representational implementation of a GEMS provided by the NEAR lab. The demonstration use case includes Flight Object data exchange by using Flight Information Exchange Model (FIXM) version 3.0.1 between an FAA research and development Flight Object Exchange Service, an airline EFB, and the SpacecraftReentryHazardAreaService, consuming the aircraft state data within the Flight Object FIXM message and publishes its output by using AIXM version 5.1 for consumption and display by other interested parties. (Fig. 3)

Single European Sky Air Traffic Management Research SWIM/FAA SWIM architecture of a SpacecraftReentry-HazardAreaService. 16 FAA, U.S. Federal Aviation Administration; GEMS, Global Enterprise Messaging Service; NEAR, Next Generation ERAU Applied Research.
The SpacecraftReentryHazardAreaService consists of a data server implemented as a Hypertext Transfer Protocol Secure web server. Fed with the SV state data (speed, altitude, location, etc.), the SpacecraftReentryHazardAreaService provides Hazard Area information by using a hazard area model. For the demonstrator, a provisional hazard area model, which assumes a Space Shuttle-like trajectory of the hypothetical spacecraft, has been used. It can be replaced in later versions by a more accurate module that uses advanced fragmentation models of the individual SV flight to be covered.
The developed prototype solution provided technical test data for a European/U.S. harmonization use case, which can be seen as a foundation for a SWIM-based integration of SVs into ATM on a global level.
SV Integration Case Study Design
Case Study Approach
As described, a general approach has been developed on how to address the challenges on ATM for integrating SVs by utilizing AIM via SWIM. Technical demonstration of an interoperable SWIM service prototype, which addresses the SESAR- and NextGen environment at the same time, has been successful. Nevertheless, several questions have yet to be answered about the possible impact that CST from, to, or within Europe could have on the air traffic system, based also on the specific type of operation to be considered. How can this impact be minimized, especially when these types of operation become more frequent? How should the information, made available via SWIM, be composed, conditioned, and applied on strategical and tactical levels within the ATM (such as for planner, flow managers, air traffic controllers, or pilots)? All this is done with one overall purpose: to ensure a safe, efficient, and sustainable way on how to operate space and air traffic together.
For further exploration of these questions, a case study approach has been chosen. To evaluate each of the case studies, a suitable validation environment has to be designed and prepared. This includes:
• A traffic impact analysis framework for CST operations within European airspace. It is described in the sub-section Traffic Impact Analysis Framework. • A framework for testing and evaluation of procedures and functionalities for an improved handling of CST on ATM stakeholder level, including SWIM-based data exchange and tactical air traffic interaction with humans in the loop. This is described in the sub-section Space and ATM Operational Testbed.
The case studies will then analyze traffic impact and integration concepts for specific types of SV operations, as indicated in Types of SV Operation Relevant to ATM. They will have a specific focus on how those operations would affect European airspace, while not leaving out the global perspective. The DLR SpaceLiner, a hypersonic intercontinental passenger transport concept, has been chosen as a first case study. Its ambitious suborbital mission profile and the relevant operational constraints will be introduced in SpaceLiner Point-to-Point Suborbital Flight Case Study Scenario.
The evaluation will be planned and executed in reference to the European Operational Concept Validation Methodology 17 and in line with the Operational Concept Validation Strategy Document. 18
Traffic Impact Analysis Framework
To answer the questions that arise from introducing SV operations in the current ATM, the traffic impact analysis will try to demonstrate not only the potential impacts on the European airspace system but also the benefits of new air traffic strategies.
The number of aircrafts that can fit into ATC sectors, keeping in mind aircraft separation and safety standards, area navigation direct routings, and other factors, is called airspace (ATC sector) capacity. 19
The questions that will be answered with the traffic impact analysis are as follows:
• What kind of influence do SV operations have on the capacity in the airspaces alongside the restricted areas? • How does that affect the controller workload? • Is it possible to integrate SV operations into the current ATM?
Fast-time simulation (FTS) is a very common way to answer a scientific question very precisely. It is used in many case studies as a first and reasonable approach to answer questions on how different modifications in the airspace may influence the capacity and traffic flow. The FTS will be performed with AirTOp (ATC Fast-Time Simulator and Air Traffic optimizer), a new-generation simulation platform that allows the representation of gate-to-gate air traffic operation. Among other properties, it includes en-route traffic and ATC modeling, 4D TBOs, and air traffic flow management.
The methodology behind this kind of impact analysis integrates several areas: analyzed days, air traffic data, and applied airspace model and simulation environment.
All these parameters will be implemented in the FTS tool as input data.
Analyzed days
The traffic impact analysis customarily simulates different traffic scenarios covering three non-consecutive days. For the purpose of this study, the following days were considered: 17th, 24th, and 31st of March 2015. As a main evaluation, 24th of March is chosen. It represents a typical day during a work week in a month with no additional traffic because of charter flights (summer period) or holidays. One week before this date and 1 week after this date are compared as verification for the number of flights.
Air traffic data
These data were received from EUROCONTROL for research purpose. The data consist of historical traffic demand, as well as the actual flown trajectories and are used to generate a specific air traffic scenario to suit the purpose of the investigation. Around 24,000 flights for each scenario are considered, or in total around 72,000 flights. Figure 4 represents 24 h air traffic simulation in Europe, with a flight plan containing more than 22,000 flights.
One-day traffic scenario simulated with AirTOp. AirTOp, ATC Fast-Time Simulator and Air Traffic Optimizer. Color images available online at www.liebertpub.com/space
Simulation environment
As already mentioned, simulation of the European air traffic as well as the airspace restrictions and hazard areas is performed with the AirTOp FTS. AirTOp is also an open modular and extensible tool that allows one to write specific airspace restriction applications.
The common way to investigate a scientific question with FTS includes first creating a reference scenario, which correctly reproduces the existing air-side conditions. For calibration of the scenarios, recorded traffic data and ATM information are used. Afterward, the specific traffic scenarios are generated and modified according to the research question. The simulation process is finished with a comparison of certain predefined parameters from the validation scenarios and assessment and analysis of the impact that certain changes had on the overall traffic and airspace capacity.
In addition, to generate and implement flight trajectories within AirTOp, a tool named RouGe (Route generator) is used. RouGe is developed at DLR, and it is used as a platform to convert the Eurocontrol's SO6 Data in a format that is directly readable by AirTOp and other internal DLR software programs. The information from SO6 is then exported into separate files that are compatible with AirTOp containing the following information: flight plan, aircraft, routings, waypoints, and airports.
Airspace model
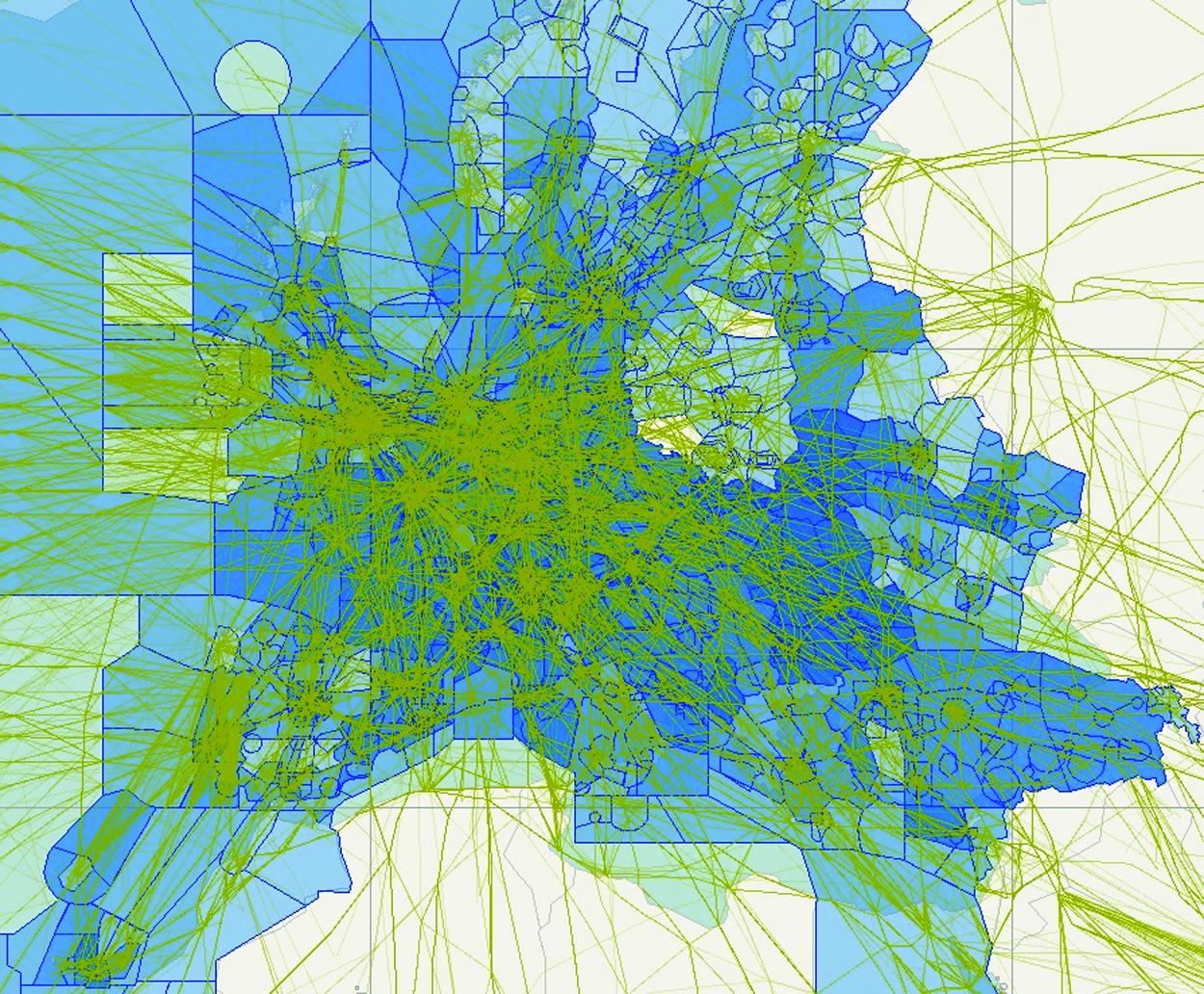
The airspace model is generated according to the chosen scenario of the respective day. Airspace data are gathered and consolidated from EUROCONTROL's Demand Data Repository (DDR2) and the European AIS Database (EAD). The airspace model contains more than 600 sector volumes depending on the day and airspace configuration. The airspace model contains two types of ATC sectors: collapse sectors and elementary sectors. Collapse sectors may tactically be split vertically or laterally. This is a dynamic process that can be reproduced in AirTOp. The airspace model is shown in Figure 5. Darker colors indicate overlapping sector configurations that have been accounted for within the model.

Representation of the European airspace structure in AirTOp.
The appropriate airspace model for each simulation day will be included when setting up the simulation. To proceed faster with the process of simulation, the same model is applied to all three simulation scenarios, as there are no significant differences of the airspace models between the simulation days.
Airspace restrictions and hazardous areas
Airspace restriction areas represent a defined volume of an airspace in which operations face certain limitations. They can be defined as: (1) zones for different dangerous activities such as military regular exercises or (2) simply for protection of areas with high value such as national parks, etc. In the first case, the airspace is off-limits for all operations except for aircraft operations, which are part of those activities. In the second case, prohibition of flying is applied to all users. The constraints of operation within restricted zones can be either permanent or temporary, meaning that in case of an inactive restricted zone ATC provides services in the zone, usually allowing the aircraft to operate in it. 20
In this investigation, many dynamic hazardous areas along the SV trajectory will be included in the simulation, as well as a certain amount of restricted airspaces along the movement of the SV.
Definition of the airspace capacity
The airspace (ATC sector) capacity can be defined as the maximum number of aircrafts per unit of time that can be safely handled by controllers. This includes all constraints that are part of such a process: controller and pilot workload, weather constraints, etc.
When a certain disruption in the airspace happens, whether it is weather related or has another nature, the portion of that airspace is partially closed, which may cause deviations or even cancellation of flights over the affected period. Because of an external constraint—in this case study the SV operations and the subsequent airspace restrictions and hazardous areas—the capacity of certain airspaces over Europe can be significantly reduced.
The question raised here is as to whether the impact of potential SV operations in the European airspace will have a significant influence on the ATM system as well as on reduction of the airspace capacity. The second question that arises in this investigation is as to whether in such disruptions of the ATM, the current ATM system can handle and support these SV operations or changes in the overall ATM need to be introduced.
Space and ATM Operational Testbed
In addition to the traffic impact analysis framework, a testbed needs to be established that allows the evaluation on ATM stakeholder level. This Space and Air Traffic Management (SATM) testbed has to cover AIM integration concepts, ATC procedure adaptations, Air Traffic Controller Support, and the required SWIM-based data exchange aspects.
The SATM testbed is embedded into the DLR Air Traffic Validation Center, which comprises simulators, sensor systems, and flight testing equipment for testing and evaluating new ideas, concepts, as well as technologies for all areas of ATM. As an integrated validation infrastructure, the Air Traffic Validation Center includes:
• Model-based simulation tools for early stage and model-driven analysis of concepts and fast prototyping, including structured and quality-assured data preparation and analysis processing; • Real-time simulation tools for evaluation of technologies, concepts, and procedures with humans in the loop; and • Airport research Facility and External Testbeds, allowing live trial capabilities for technology and concept elements testing and evaluation.
The SATM testbed will specifically make use of the Air Traffic Management and Operations Simulator (ATMOS), which is a human-in-the-loop air traffic control simulation environment (Fig. 6).

Air Traffic Management and Operations Simulator (ATMOS) of the DLR Air Traffic Validation Center, Braunschweig, Germany.
ATMOS provides a maximum of five Controller Working Positions (CWP) and can be coupled with other real-time simulators of the Validation Center or external facilities in a distributed simulation setup. The CWP layout, its ATC tools, displays, and interfaces can be modified according to the purpose and needs of the validation campaign, allowing full flexibility for implementation of the required support functions for space traffic integration.
A Space Flight Simulator will represent the SV within the SATM testbed, currently using the flight simulation software X-Plane, which is inexpensive, FAA certified, “simple” to use and provides open interface protocols. As a human-in-the-loop simulator, it allows full pilot interaction as well as flying the SV on a predefined trajectory. Both ATMOS and Space Flight Simulator are coupled during runtime and can use all kinds of specifically designed air traffic scenarios (based on historic air traffic data or customized to represent certain traffic requirements), for example, by using advanced scenario editing tools that are developed specifically for this purpose.
The SATM testbed is open and flexible to add or replace certain elements and simulators by additional external facilities, allowing, for example, joint cross-border distributed real-time simulations.
In addition to the real-time simulation capabilities, a SWIM test environment has to be implemented into the SATM testbed. Allowing for integrated evaluation of SWIM applications for data distribution between the multiple involved stakeholders, the applied architecture has to cope with certain requirements, enabling feed data streams from multiple sources and replacing missing services by simulated entities, depending on the specific validation setup. The core element of the SWIM test environment will be an Enterprise-Service Bus (ESB) (e.g., by using the WSO2 ESB as an open-source solution) and the capability to expand further on the prototype solution developed within. 16
The described elements are building the core of the SATM testbed. As it is a part of the Air Traffic Validation Center, it can be further expanded, for example, by connecting it with the ATS or Airport and Control Center Simulator (ACCES) to cover additional aspects of stakeholder involvement and ATM integration.
SpaceLiner Point-to-Point Suborbital Flight Case Study Scenario
The SpaceLiner concept has been developed by the Space Launcher Systems Analysis (SART) group of DLR. Its basic idea is to enable sustainable low-cost space transportation to the orbit while at the same time revolutionizing ultra-long distance travel between different points on Earth. 21 As a future high-speed intercontinental passenger transport vehicle, it is designed as a rocket-propelled, two-staged suborbital Reusable Launch Vehicle (RLV) that can service ultra-long haul distances such as Europe–Australia in 90 min. Intercontinental destinations between Europe and North-West America could be reduced to flight times of slightly more than 1 h.
The general baseline design concept of the SpaceLiner (in its current design evolution stage 7-322) consists of a fully reusable booster and passenger stage arranged in parallel. The current arrangement of the two vehicles at liftoff is presented in Figure 7.

The SpaceLiner vision of a rocket-propelled intercontinental passenger transport consisting of a fully reusable booster and passenger stage.
During the launch phase, the rocket engines of both orbiter and booster stages are firing until separation, which will take place at approximately Mach 12.5. The reusable booster stage will fly back to the launch site by using an in-air-capturing method through its subsonic descent. Towed by an airplane, it will be later released for an autonomous glide landing. Launch phase and booster return are (yet) not considered within the case study, but will see further consideration as work continues.
Meanwhile, the orbiter stage will proceed with its power flight until Main Engine Cut Off (MECO) with a maximum speed of around 7.1 km/s at an altitude of 69 km and a flight path angle γ close to 0°. The propulsive phase is directly followed by hypersonic gliding, 22 which will be the flight phase that the case study will focus on. The SpaceLiner7 orbiter is characterized by an aerodynamic shape arisen from fully automated optimization processes that lead to a single delta-wing configuration. 23 Safe controllability of the vehicle in all flight conditions has to be assured, including during abort cases. The SpaceLiner7 passenger stage achieves without flap deflection an excellent hypersonic lift to drag rate L/D of 3.5 up to M = 14, assuming a fully turbulent boundary layer. The laminar-turbulent transition is assumed to occur at an altitude of 58 km, which is around Mach 18. 24
The ambitious west-bound Australia–Europe mission (up to 17,000 km) has been used as the reference case since the beginning of the SpaceLiner investigations. This flight distance should be served for 50 passengers on a daily basis in each direction. As described, the propelled flight phase is followed by hypersonic gliding, through which the vehicle would travel more than 1,000 km almost outside of the atmosphere at very low drag. However, to avoid excessive heat rates, an increased angle of attack is subsequently needed at a lower altitude and that has a strongly decelerating effect. The orbiter will approach its destination, entering controlled airspace at an approximate distance of 70 km/37 NM with its speed below FL600 being already less than Mach 3 (and will decelerate further below Mach 1 down to an altitude of ∼36.000 ft or FL360, as shown in Fig. 8). These values allow a certain comparison to previous Concorde operations, but here they relate to an unpropelled vehicle. Vertical separation for Concorde was doubled compared with subsonic airliners, whereas its horizontal separation depended on speed differences. To be further considered is the difference between the Concorde being operated under the regulations and reliability requirements of a commercial airplane, and the SpaceLiner as a less reliable (space) vehicle.
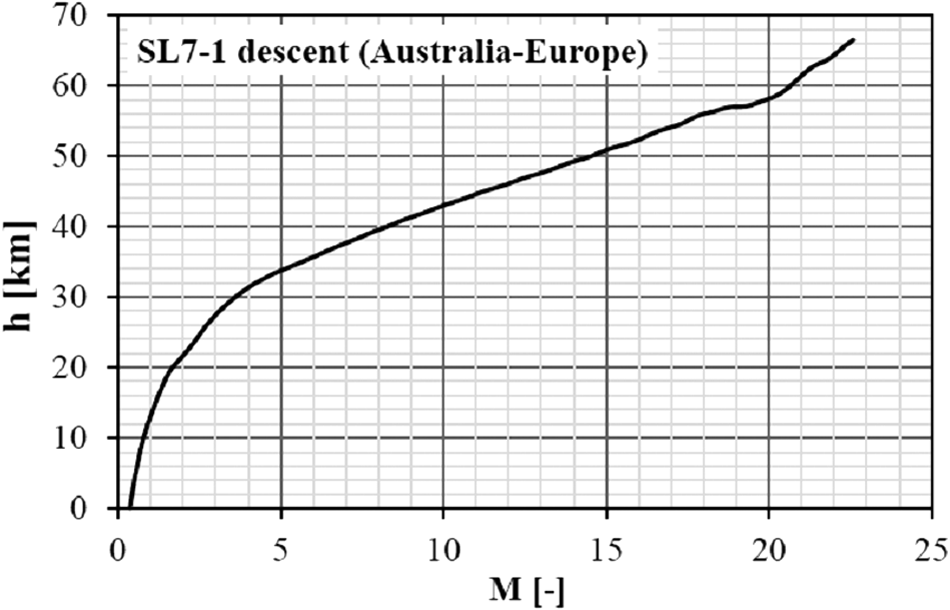
Mach number and altitude for the SpaceLiner 7-1 reference descent trajectory.
The launch and ascent noise as well as the sonic boom reaching the ground are most critical for a viable SpaceLiner operation in the future. The selection of potential SpaceLiner launch and landing sites will likely be influenced by constraints due to generated noise. 25 Trajectory optimization has to take into account such constraints of a realistic operational scenario that are restrictions in acceptable flight corridors and relative proximity to potential customers. Regarding the selected use case, such considerations combined with safety requirements lead to a landing site in vicinity of the coast, which allows performing the majority of the atmospheric portion of the approach over inhabited areas, for example, the Atlantic Ocean, as shown in Figure 9*.
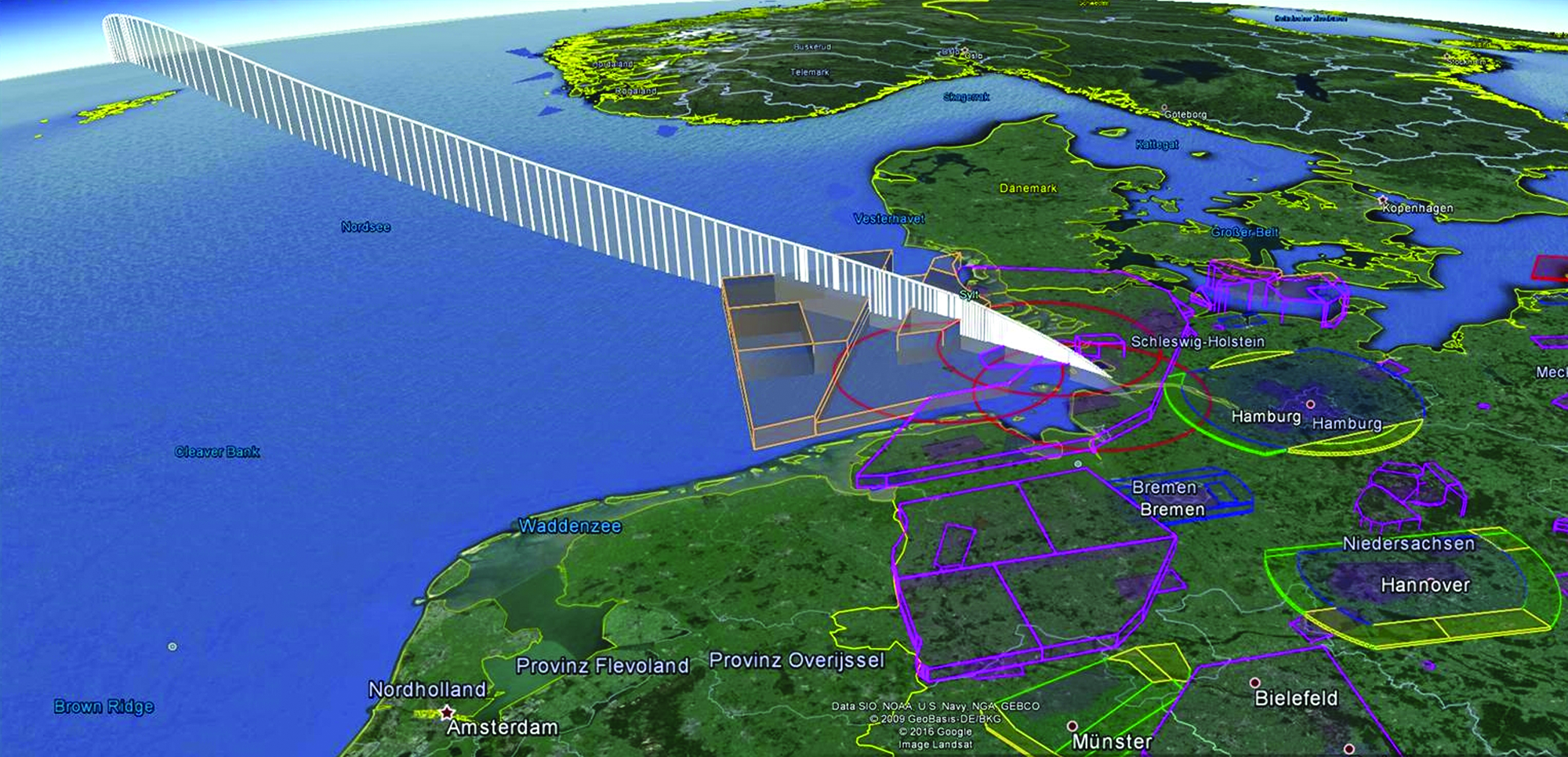
SpaceLiner descent trajectory for destination in northern Germany; showing also danger areas, restricted areas, and temporary restricted areas within German airspace. Color images available online at www.liebertpub.com/space
The final approach of the SpaceLiner is currently not modeled in detail. It is expected that a Terminal Area Energy Management (TAEM) maneuver will have to be added to get the SpaceLiner orbiter lined up with respect to the runway at the correct amount of energy. TAEM will require a cylindrical or cone-like area that is close to the landing site. The size of the TAEM cylinder will depend on the entry speed, which can have a radius of up to 15 km if it is still supersonic. A turn with supersonic speed would cause high sonic boom effects on the ground in the area of operation, which means that it should be avoided close to inhabited regions. The design of the final approach segment of the SpaceLiner trajectory will, therefore, be the subject of further optimization.
Case Study Outlook
With the preparation of the Traffic Impact Analysis Framework and the SATM testbed in place, the case study for the SpaceLiner approach scenario for northern Europe, with a landing site at the German coast, will be carried out as already described.
With the results of traffic impact analysis at hand, measures to minimize impact and to ensure efficient handling of CST within the ATM environment will be developed and evaluated (e.g., regarding their usability). This is part of an iterative approach that will assess the effects of the developed concepts and technologies throughout the use case.
The SpaceLiner use case will determine ways on how to integrate a hypersonic point-to-point intercontinental passenger transport into the air traffic system and to deliver further requirements for the SpaceLiner flight performance as well as for its concept of operation. The experience of this first use case will be applied on follow-up use cases for other specific types of SV operation.
Summary and Conclusion
The numbers and locations of SV operations have increased significantly over the past decade, and the market forecast suggests a stable development with high chances of further growth. With new technological concepts for launch, flight, and reentry, the kind of interaction between space operation and regular air traffic is getting increasingly diversified and has to be considered more extensively and on an international level. To ensure a sustainable development of CST, the handling of SV operations has to become an integrated part of ATM. The nature of spaceflight and its comparably lower target level of safety compared with commercial air traffic is specifically challenging for such integration. The introduction of TBOs under the regimes of the SES and the NextGen can be utilized to address these challenges. This has been demonstrated by a prototypical solution for a SWIM-based integration of SV operations, including a technical setup to achieve interoperability between SESAR and NextGen and a European–U.S. harmonization. To address specific questions about the impact of SV operations on certain air traffic regions and to validate the concepts and technologies to mitigate these impacts, a Space and ATM operational testbed as well as a traffic impact analysis framework have been developed and established. The SpaceLiner point-to-point hypersonic passenger transport concept will be analyzed as a first use case. With the development of its flight simulation model, an important milestone already has been achieved. The SpaceLiner use case will pave the way for further analysis and evaluation of concepts and measures for an integrated SATM.
Footnotes
Acknowledgments
The authors gratefully acknowledge the contributions of Jorge Ferrand, Remzi Seker, Focke Stiekel, and Dirk-Roger Schmitt within relevant previous parts of their work.
Author Disclosure Statement
No competing financial interests exist.
*
Airspace visualization using GoogleEarth and OpenAir-data from Deutscher Aero Club (DAeC).