
Abstract
Abstract
Self-replication technology is a little known technology that is currently under development and that has enormous implications for affordable space exploration. In particular, the prospect of 3D printing of actuators and electronics offers the prospect of realizing a universal constructor, which is the basis of a self-replicating machine. The universal constructor is a general-purpose automated factory that is supported by a number of robotic devices. If programmed appropriately, it can manufacture a copy of itself (as well as other products). We present an overview of self-replication research and its application to colonization of the Moon at very low cost—it offers a means to overcome the high cost of launch through exponential exploitation of in situ resources. Combined with in situ resource utilization, a universal constructor can construct (in theory) almost any product within certain constraints. Indeed, its productivity dwarfs any potential cost reductions in launch costs. We shall focus on defining several critical technological developments. It has potential commercial applications in extremely low-cost manufacturing of solar power satellites for clean energy production for the Earth. Self-replication capability offers a mechanism for offsetting discounting of future revenue (as computed by net present value cost-benefit analysis) by generating exponentially increasing revenue over time. It represents a “Bold” (as advocated by Peter Diamandis) approach for a start-up company, toward which steps are being taken. These steps will be discussed in detail. However, the revolutionary economics will make it challenging to attract capital investment despite eliminating the discounting effect. Nevertheless, a business case can be made despite a long-time horizon of investment due to numerous progressive spin-off applications. Over the long term, self-replication technology could revolutionize space exploration by providing for remote construction of complete (although simple) spacecraft in large numbers from in situ resources. By virtue of this massive productive capacity offered by self-replication technology, missions that are currently considered too expensive or impractical become feasible, for example, space-based geoengineering, asteroid exploitation and/or mitigation, and difficult outer planet locations such as Enceladus, interstellar precursor missions, etc.
Introduction
I believe that the space sector is mired in a rut that it has inherited from its historical origins in the Cold War space race. Its philosophy is based on racing—its race to the Moon has colored its subsequent mission goals such as racing to Mars or racing to the Moon on steroids. Only recently has the landscape included major commercial players. Entrepreneurial space activities have been very active of late, the most visible of which is SpaceX—SpaceX's main customer is, of course, NASA. Other players include Virgin Galactic, Astrobotic, Planetary Resources, Made-in-Space, etc. In fact, such entrepreneurial ventures were discouraged by NASA in earlier days. Further, the racing philosophy has failed to open up the space environment to ordinary folk who might wish to exploit it as a business opportunity—we live in a world of shopkeepers, after all, who seek only opportunities to improve their lot. According to the British Government, space is one of the “Eight Great Technologies” (David Willetts MP, Policy Exchange, London, 2013). As such it should contribute to the human condition in a substantial way. I am not referring to the dreaming spires of pioneering rockets in space or the self-conscious “overview effect” described by Frank White. Although I am sympathetic to these notions, they have been a hindrance by elevating space exploration for the preservation of the technological and scientific priesthood. I wish to transform space exploration into something totally unrecognizable by opening up the space environment with near-zero cost access for ordinary folk with ideas on how to make a buck. In situ resource utilization avoids the requirement for the expensive launch of such resources from the Earth's surface. However, it is only a modest step—a fully manufactured infrastructure requires considerable capital delivery and installation. Self-replication technology is an entirely disruptive technology that offers the opportunity to revolutionize all industrial and domestic activity, especially in the space environment. Inherent in self-replication technology is the idea that there are no fundamental limits on upward human progress and growth. Self-replication effectively amortizes initial capital costs over an effectively infinite productive capacity ceteris paribus. Its exponential increase in productive capacity provides enormous opportunities for the construction of infrastructure in space to drive business opportunity. The construction of infrastructure is the key to the robust development of the space environment to enable both commercial and government activity at low cost.
The power of self-replication
Net present value (NPV) cost-benefit analysis is an oft-used analytical tool for assessing the relative merits of competing investment projects in terms of the return on investment. It typically has an S shape representing the initial costs of investment followed by the gradual accumulation of revenue until pure profit is realized. By projecting into the future, the discount rate ensures the approach to saturation, which also reflects future obsolescence (Fig. 1). NPV is given by:
where N = B−C, B = revenue, C = cost, r = discount rate, i = discrete time (years), and n = project duration. This assumes that the benefits and costs can be measured. NPV cost-benefit analysis penalizes long-term projects whose benefits are difficult to measure by using the accountant's limited set of tools, that is, investment decisions are made on the basis of ignorance. All else are lumped as externalities. This is the assertion of the cynic over the sentimentalist in Oscar Wilde's play Lady Windermere's Fan who knows the price of everything but the value of nothing. It has now become more fashionable to incorporate harmful effects such as pollution into cost-benefit analysis. NPV cost-benefit analysis stands as the primary tool of the bean-counter.
Typical NPV curve 1 —$M versus years. NPV, net present value.
There is uncertainty associated with cost-benefit computations because the future is dark and unpredictable—this is the purpose of discounting. 2 Of course, much depends on the numerical value of the discount rate r, which dramatically affects the net benefit-cost computed. Much argumentation revolves around the selection of the appropriate value. As a benchmark, over the past 50 years, the average return on investments has been 10%. However, competition for investment such as hedge funds and other financial instruments offers higher rates of return.
After World War II, national defense became heavily reliant on advanced technology funded by government programs (including the space program). This was supported by the Keynesian economic model of economics—social security payments cushion the fall in consumer spending, whereas infrastructure investment stimulates economic growth. Similarly, governments can alleviate the investment requirement of projects and increase profits to the private sector by providing initial seed funding, particularly for basic and applied research and development (Fig. 2). Apple received a business development grant of $500,000 during its early days (yet today, it pays marginal tax in return). Innovation in the private sector has often been driven primarily by government support of infrastructure technology—both internet and GPS were military research projects before being co-opted for civil use.

NPV curve with government seed funding 1 —$M versus years.
However, the discount effect is still apparent, even with initial government funding. Cost-benefit analysis generally refers to a single project involving an initial investment followed by a revenue stream that is progressively discounted into the future. The limitation is that a fixed capacity generates a fixed revenue stream. A self-replicating machine, however, overcomes this limitation through its exponential growth in capacity. The productive capacity of a self-replicating population has a similar form to NPV cost-benefit analysis and is given by:
where r = number of offspring per generation, i = generation number, and m = number of generations. The discount rate in NPV cost-benefit analysis is typically 0 < r < 1; whereas in a self-replicating machine, the number of offspring per generation, r ≥ 1. For instance, if r = 2 and m = 13, P > 2 × 106, that is, the power of self-replication yields exponential growth in production.
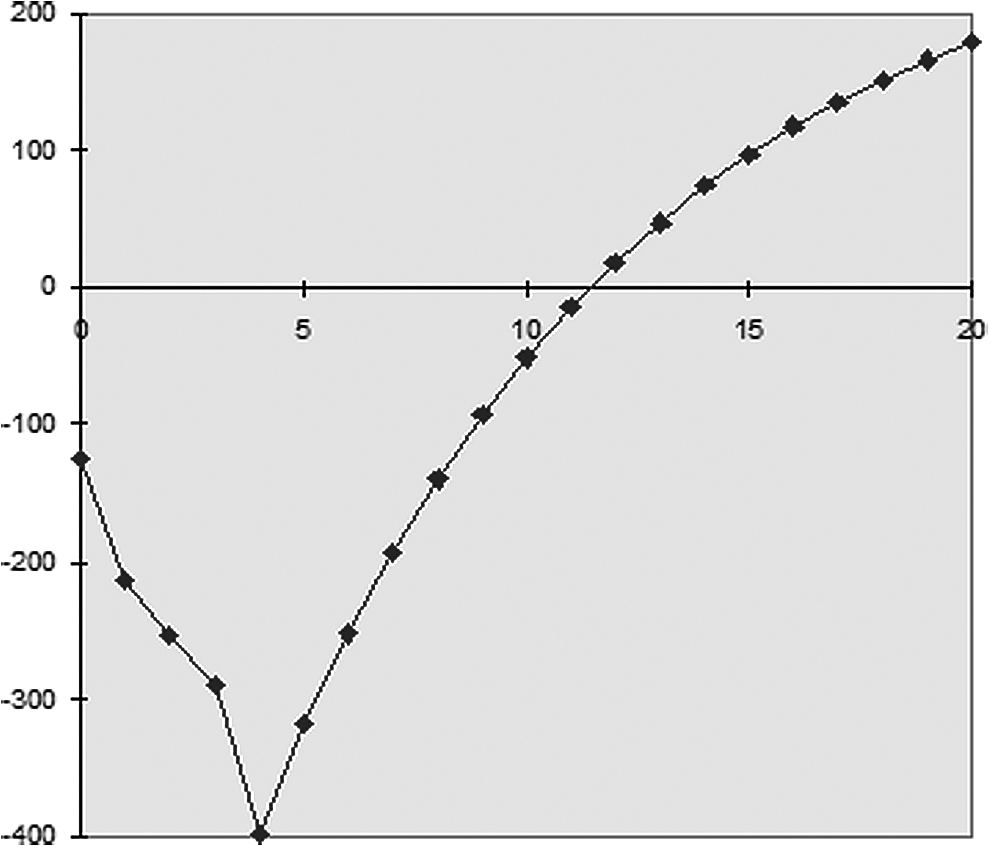
An initial capital outlay for the initial self-replicating machine yields a productive capacity that grows exponentially (Fig. 3). This capacity growth of self-replication outpaces the accumulated penalty in NPV cost-benefit analysis. The bean-counter has finally been slain! Further, obsolescence is alien to self-replicating systems in a very real sense. Modifications or upgrades may simply be uploaded to old self-replicators to produce the new upgraded versions—no upgraded machines need be supplied, so no further capital costs are incurred.
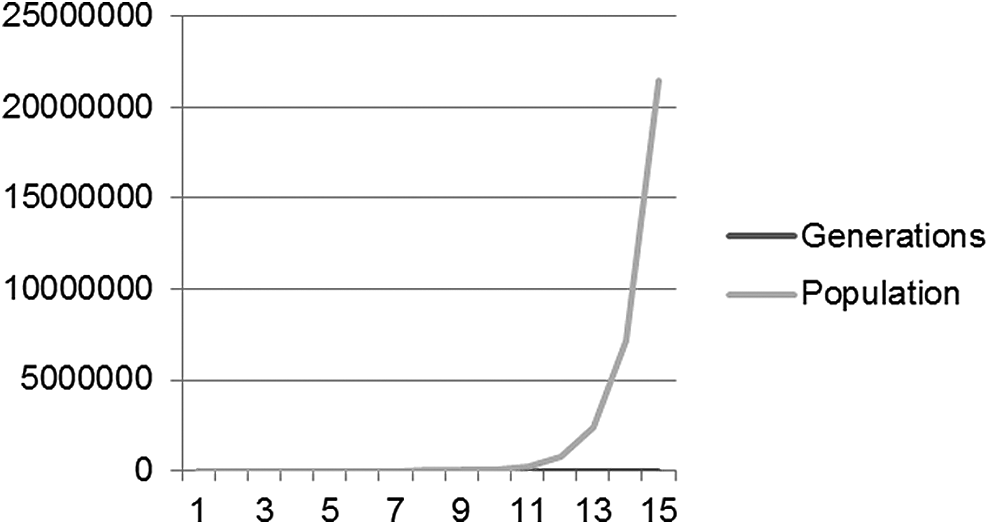
Exponential productive capacity of self-replication—population versus generation.
Self-replicating machines
Much of the theoretical background to self-replicating machines is given in Ref. 3 The self-replicating machine concept as developed by John von Neumann was based on the Universal Constructor, a machine that if given the appropriate resources can construct anything (within the bounds of reason). This includes a copy of itself, ergo, a self-replicating machine. The self-replicating machine comprises two core systems—a generalized robotic mechanism and a universal computer to control it. Self-replication is a disruptive technology with many spin-offs on the way to its realization. The most fundamental components for any robot are electric motors and electronic controllers. Such robots include rovers for mobility, 3D printers for manufacturing, manipulators for assembly, or a combination thereof (such as Fig. 4).

Mobile rovers 3D printing regolith on the Moon [credit European Space Agency].
Many of the technical issues involved in designing a self-replicating machine using in situ lunar resources are outlined in Ref. 4 The Moon has almost all the extractable resources required to build a self-replicating machine, including structures, electric motors, and electronics (Table 1).
Lunar Material and Their Functionality
Although much of the required material can be extracted from surface lunar regolith, some require access to subsurface NiFe asteroid material marked by mascons. Specific issues related to lunar mining are addressed in Ref. 5 The processing and purification processes required are also addressed in these papers. From these materials, a variety of 3D printing techniques may be employed—fused deposition modeling (FDM) for silicone plastic, electron beam freeform fabrication (EBF3) for metals, and selective light sintering (SLS) for ceramics. The focus of my work has been in 3D printing of electric motors as a critical step toward self-replication. Early work in 3D printing electric motors is described in Refs.6,7 Since then, several new motors have been developed that incorporate 3D-printed features. A test setup has been built to test direct current (DC) motors that incorporate 3D-printed motor cores comprising magnetic iron particles impregnating a plastic matrix extruded by FDM (Fig. 5).
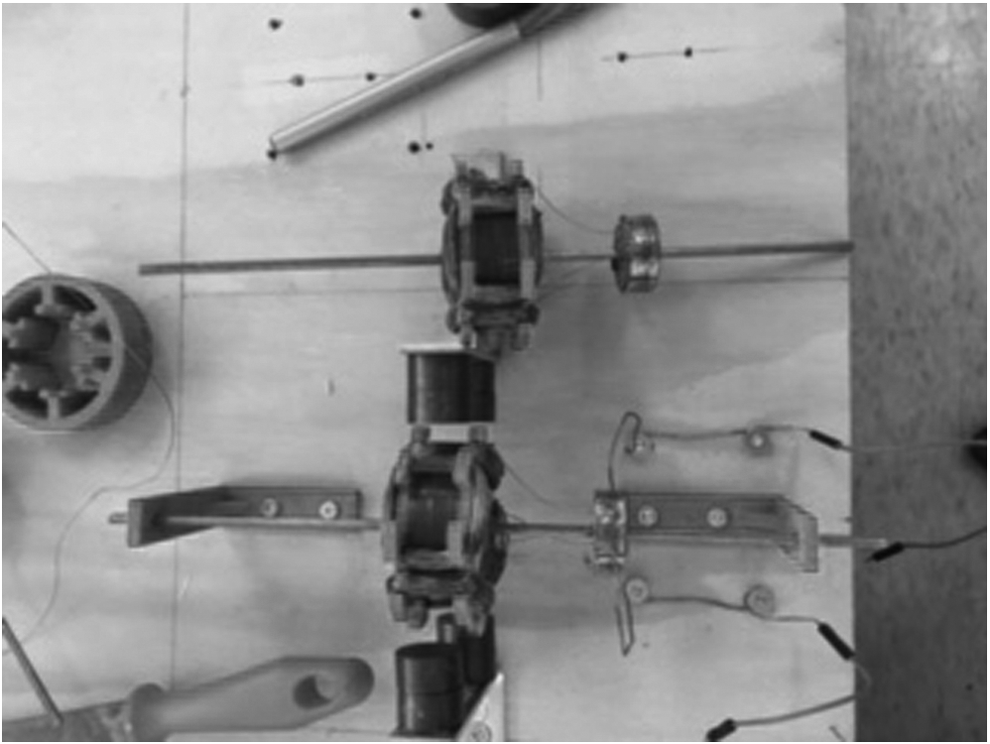
Direct current motors with 3D-printed motor cores of plastic impregnated with iron particles.
A pancake motor has been developed with a 3D-printed support structure using wire coils on the armature (Fig. 6).
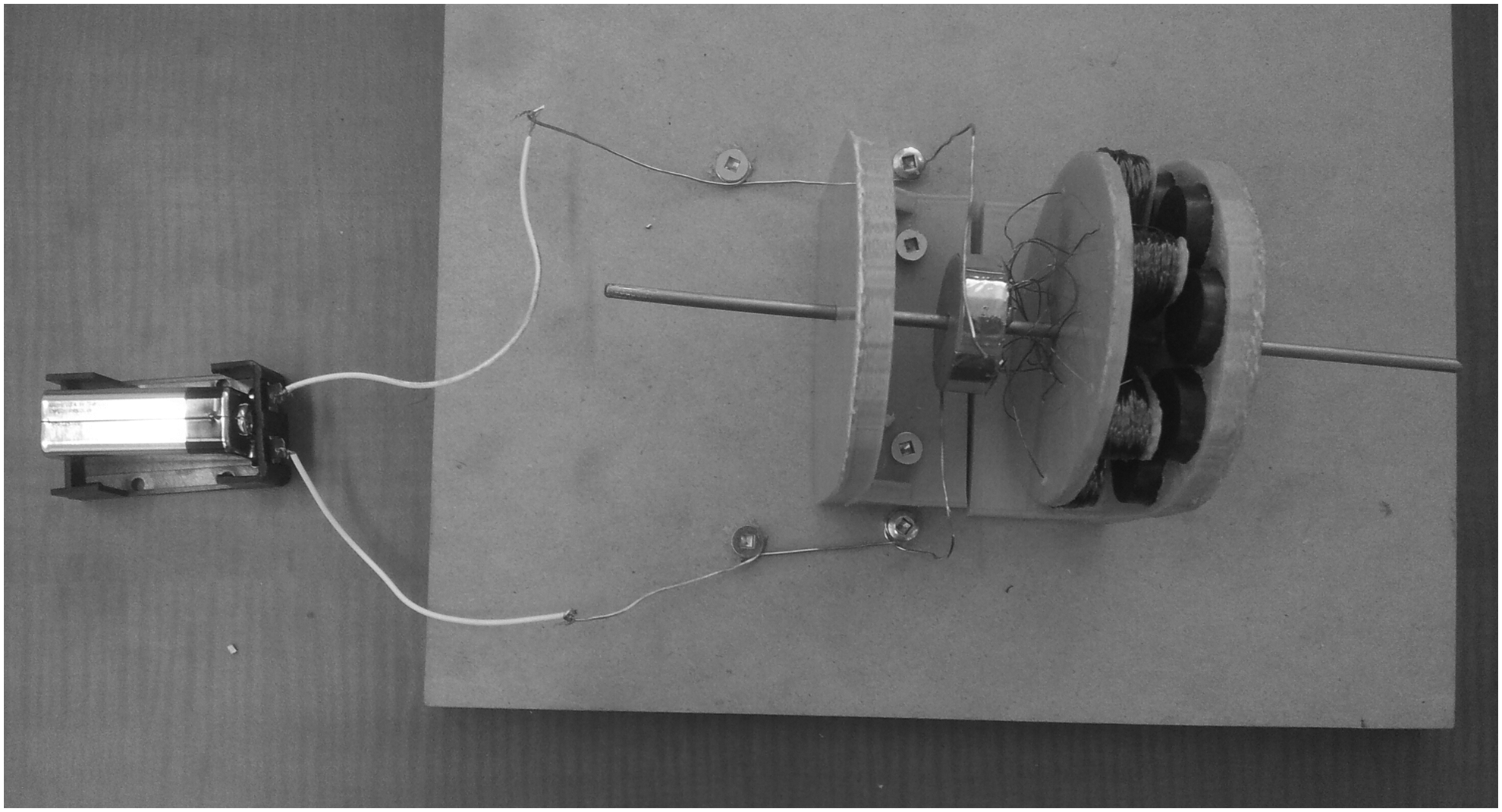
Three-dimensional printed pancake motor structural support.
The wire coils of the pancake motors have been replaced by photolithographically printed coils on the armature 8 (Figs. 7 and 8).

Photolithographically printed coils for the pancake motor.

Printed coil armature in 3D-printed pancake motor.
The next stage involves sandwiching the photolithography printed coils and incorporating them into the earlier DC motor designs. This will yield the first, fully 3D-printed electric motor. Then work can begin tackling reducing or eliminating the manual assembly process by using new designs. Although most of this work has concentrated on using FDM to print metal-impregnated plastic, it is anticipated that this work will be extended to metal printing, including EBF3 and SLS. Although 3D-printed motors can be tailored to specific applications, competing with the traditional motor industry is unlikely to be successful except in niche applications. In particular, it is expected that their performance will initially be inferior to traditional off-the-shelf motors that have benefited from a century of accumulated wisdom. One niche application would be incorporating 3D-printed reaction wheels in 3D-printed cubesat-like spacecraft such as might be inspired by the EyasSat spacecraft model (Fig. 9). One of the products of the self-replicating machine is a spacecraft and indeed, all the subsystems required for a spacecraft are those required by a self-replicating machine. Such 3D-printed spacecraft, including motors, may be printed on demand on the International Space Station (ISS) from an inventory of stored raw materials offering the capabilities of actively controlled attitude control and slewing.
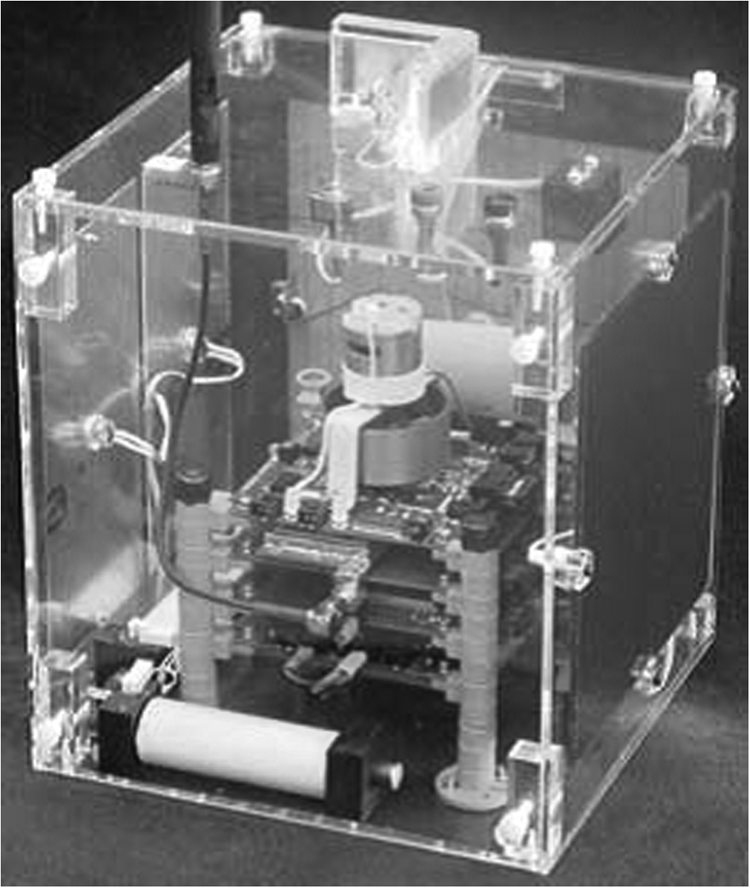
EyasSat spacecraft model with central reaction wheel.
We have not yet demonstrated 3D printing of electronics, but we have been exploring a computational architecture based on analogue neural networks (implementable using vacuum tubes) that is potentially 3D printable from the material set in Table 1 9 (Fig. 10).
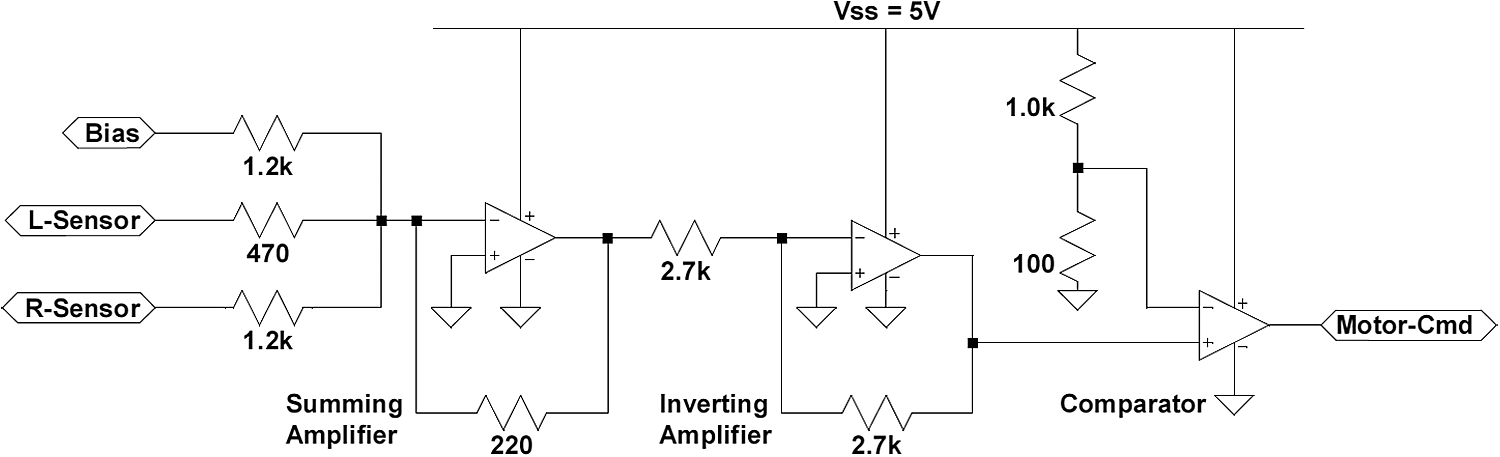
Modified Yamashida-Nakaruma hardware analog neuron circuit used on a desktop rover.
A two-analogue neuron circuit has been demonstrated as implementing obstacle avoidance on a desktop rover. An analogue neural network control circuit has been developed as a backup to a satellite control system to automatically implement safe mode. 10 It uses sun sensor measurements to activate the neurocontrol circuit independently of the onboard computer to orient the spacecraft to a deadband around the sun axis if the spacecraft veers away from it. Each neuron is inhibitory, comprising a summing differentiator amplifier with an input time delay followed by a bistable Schmitt trigger comparator. The two-neuron network is connected in series so that the output of one neuron feeds into the input of the other, which is different to our parallel two-neuron connection arrangement. Issues related to 3D printing electronics in the form of analogue neural networks are addressed in Ref. 11 Any neuron is characterized by a constant probability of failure. To emulate n perfect neurons, we need O(nlogn) redundancy in unreliable neurons to compute the same function. Hence, there is low growth in circuit complexity in implementing reliability in neural networks. The leaky integrate-and-fire neuron offers the possibility of stochastic resonance for the extraction of signals buried in noise. 12 Appendix considers the use of neural networks for artificial intelligence requirements that are imposed by a self-replicating machine. The implementation of artificial intelligence in neural networks, in general, is reviewed in Ref. 13 The prospects for deep learning in hardware neural networks are promising 14 —once learning is complete, the neural network configuration and weights are fixed suitably for implementation in hardware.
We have, thus, considered the two core components of a self-replicating machine—actuators and electronics. The ability to 3D print electric motors and electronics will represent a major leap toward realization of a self-replicating machine. In a naïve sense, this is obvious if we take the RepRap 3D printer as our representative model. It is capable of printing its own plastic parts. To become fully self-replicating (from feedstock), it must be imparted with the ability to print its metal components (implementable through EBF3 based on a high-power vacuum tube), its electric motors (it is essentially a Cartesian robot), its electronics (vacuum tubes in neural net configurations can realize general computing capabilities), and its energy source (vacuum tube-based thermionic conversion generates electrical energy from solar sources, and motorized flywheels implement power storage). Manufacture of feedstock from lunar resources is more challenging but essentially requires rover vehicles with articulated manipulator scoops and/or bucket wheels—these are essentially robotic devices, again, configurations of motors controlled by electronic circuits. We estimate 6 years to a working prototype that is similar to the RepRap based on our 3D metal printer under development. Development of a flight version over 2–3 years is typical for a planetary rover; our Kapvik micro-rover (including its onboard intelligence using commercial off-the-shelf systems) was developed from concept to pre-flight version within 2.5 years, including its test campaign. The upcoming lunar Resource Prospector mission will demonstrate some of the basic in situ resource utilization techniques that are required to extract feedstock from lunar resources. Once a single fully self-replicating machine has been emplaced on the Moon, the mathematics of self-replication (eq. 2) dictates that within 6 years, the order of a million units will have been manufactured assuming a generation time of 6 months.
Is There a Business Case?
What are the prospects for success? Not all technological investments have been successful. Research and development is the primary source of scientific and technological innovation, but it is risky and expensive. The supersonic Concorde aeroplane was enormously successful technologically but was an abject failure financially. Early gene therapies were failures, and stem cell research has been plagued with scandals. More recently, the Human Brain Project has been a fiasco. Self-replicating machine development does not suffer from the ambiguity and the complexities that are inherent in biological research. Self-replication technology is a general-purpose technology that is characterized by its potential for pervasiveness in downstream industries such as manufacturing and energy generation. 15 The closest historical analogy was the electrification of factories in the 1920s and the introduction of electric motors throughout manufacturing that led to rapid increases in productivity. 16 Is there sufficient innovation for success? To the economist Ronald Coase, innovation is built into a company to perform tasks that cannot be accomplished by individuals through a market mechanism. To the great economist Joseph Schumpeter, innovation may be likened to the dance of Shiva creating waves of creative destruction, with vibrant new technologies laying waste to tired old industries. This is an evolutionary process of continuous innovation and culling. Self-replication technology corresponds to one of the two Schumpeterian fundamental technological innovations (new product and new means of production). New means of production was highlighted as the most important technological innovation—self-replication is such (and simultaneously a new product also). To the philosopher of science Thomas Kuhn, there are two types of scientific innovation—small, incremental innovations that progress scientific advance in small steps, and the rarer but more devastating paradigm shifts that radically alter entire scientific viewpoints. Self-replication technology is the latter.
There are three economic cycles—the well-known short-term business cycle of 3–5 years, the long-wave Kondratiev cycle of 40–60 years, and the medium-wave Kuznets cycle of 15–25 years. 17 The Kuznets cycle corresponds to the lifecycle of replacement of capital equipment through major investments—self-replication technology will eliminate this cycle entirely by providing continuous upgrading at low cost. The Kondratiev cycle comprises economic peaks that are separated by periods of slow growth, with peaks corresponding to technological revolutions that then diffuse as infrastructure developments—1771 (industrial revolution of textile production), 1829 (age of steam and railways), 1875 (age of steel and heavy engineering), 1908 (age of oil, automobile, electricity, and mass production), and 1971 (age of information and telecommunications). We postulate a sixth innovation cluster of post-information and communication technologies (post-ICT) robotics and self-replicating machines in the 2020s. Self-replication technology has the potential to be a revolutionary technological paradigm change that is associated with long-wave Kondratiev cycles. Such long-term technologies create both wealth and more new jobs than they destroy in expanding markets by creating new products and services.
To the business theorist Clayton Christensen, innovation is something altogether more ethereal—it cannot be ensnared, surgically investigated, or controlled. Innovation is crushed by bureaucratic attempts to harness it. Is novelty an indispensable component of innovation? Sir Isaac Newton, arguably the greatest scientist who has ever lived, whose output of novel scientific ideas was prodigious, in a rare moment of modesty, wrote “if I have seen further, it is because I have stood on the shoulders of giants.” Here, we have the admission that any new, innovative ideas are never really truly new, but are derived in some fashion from one's previous learning and experience—so-called “prior art.”
These definitions of innovation are all true, of course, making the quest for understanding innovation ever more mysterious. But here, there are two aspects to innovations of importance—the technically creative aspect and the entrepreneurial aspect that brings the technical creation to the market. Indeed, the entrepreneurial aspect may not even need technical novelty as it may involve identifying new markets by adapting an existing technology or product. Conversely, there are many technical creations that never make it to the market, or do but fail to catch, or do but are subsequently supplanted. Or, the technical novelty may be just too innovative and must wait for the market to catch up. Evidently, technical creativity is no guarantee of success—this is the source of the ethereal quality of innovation. Celebration of the entrepreneurial aspect was emphasized by Peter Diamandis in his best-selling book Abundance: The Future is Better Than You Think but the work presented here is on technical innovation. Most innovations begin in a primitive state—our 3D-printed motors will not compete with traditional motors initially. They may appeal to early adopters in niche markets but crossing the chasm to the majority market will require superior qualities such as price, performance, or ease of use. This penetration into the majority market often takes considerable time, for example, aeroplane (1903–1935+) and mobile phone (1983–1995+).
An important facet of innovation is the requirement for education, particularly university education. 18 Universities perform research and development as they form research groups of skilled and educated people whom they have trained. Their research is often funded by public and private investors. Universities are the repository of human capital, which it educates with human knowledge. This is the origin of the work on self-replicating machines presented here—it is unlikely that corporate industry could have spawned such a child.
We have adopted an open innovations approach in order not to be shackled by patent designs (our designs are constantly evolving)—evidence suggests that it is more efficient and productive than patenting. Patents can act as straitjackets to accelerating innovation. Patent trolls do not engage in innovative activity but serve to block it. They do business by suing for patent infringement of their own typically vague, generalized, and speculative patents. Between 40% and 90% of patents are never exploited. It is questionable as to whether patents offer any real protection. Inter partes review (IPR), designed to combat patent trolls, can invalidate patents (with an average 70% invalidation rate), but smallholders are particularly vulnerable when IPR is petitioned by powerful corporations. 19 Open innovation provides the prospect for attracting external contributions. Publishing developments should prevent parasitism by patent trolls. This presents a challenge to any business model. Could this project become a unicorn? Unicorns are startups that have an evaluation exceeding $1B within a year or two of starting but have yet to be floated on the stock market. Many have negligible revenues that do not reflect these high valuations that are inflated by the investors. When floated on the stock market, they often cannot command such valuations. Investors are offered guaranteed returns if valuations drop when floated on the stock market. As a consequence, common stocks such as those held by employees are diluted. Notwithstanding that caveat, we have been unsuccessful in attracting investment. Despite our stepping stones, we are too far away from the market and must rely on government sources to bring us closer to the market.
Are There Legal Showstoppers?
The Outer Space Treaty (1967) (and the unratified and therefore irrelevant Moon Treaty of 1979) forbids the appropriation of natural resources on the Moon or other celestial bodies by any nation. Further, occupation by emplaced structures does not imply property rights. This, of course, does not refer to the structure itself that retains its ownership interests. Further, it does not pass comments on manufactured products that are created from mined raw materials. Given the failure of the Bogota Declaration (1976) to secure the geostationary orbit as subject to national appropriation by equatorial nation states, it is unlikely that freedom of use of extraterrestrial resources will be successfully challenged. The geostationary orbit is a scarce and finite resource of physical space that is exploited by communications satellites and is being degraded by such use when end-of-life geostationary satellites are not inserted into a graveyard orbit. Currently, this constitutes a customary (though undesirable) practice that may be directly applicable to lunar exploitation of raw materials that are similarly degraded by use. Nevertheless, in reality, the law generally implements a form of “wait-and-see” policy to ensure that desirable commercial development is not curtailed by premature legislation. The unratified Moon Treaty (1979) exemplifies this.
Legal positivism holds that economic analysis may be applied to tort, contract, and criminal law to increase economic efficiency in a Pareto sense.20,21 The goal is to minimize all costs, including the costs of legal error and incurred financial costs. In a criminal case, the probability of guilt and deterrent to criminality must be balanced against the probability of wrongful punishment (price) of the innocent based on the social cost of criminal behavior. The legal positivist approach, however, has been disputed by the Hayekian view that law as order emerges spontaneously to mediate consistent interpersonal relations. 22 This argument is weak—bordering on the mystical—in comparison with the legal positivist argument that imposes a utilitarian principle to the conduct of international law. There are, nevertheless, weaknesses in the market mechanism (imperfect information, transaction costs, and externalities in particular) requiring additional mechanisms such as welfare economics to compensate. 23 These, of course, must be considered in the economic approach to legal judgment. This suggests that in situ resource utilization should be supported legally if economic principles are observed.
There are further legal issues introduced by self-replication technology. The most relevant legal precedent regarding self-replicating entities concerns seeds.24,25 The case of Monsanto versus Bowman concerned a dispute over patent exhaustion on Monsanto's Roundup-Ready soyabeans that were genetically engineered to be herbicide resistant. It was argued that the patent on the bean did not extend to second-generation beans that were grown from the purchased first generation. The sale of the product was considered to have exhausted the patent on the product, permitting it to be used or resold. With self-replicating entities however, using and copying are the same thing. The patent right was, thus, upheld as applicable to subsequent generations of seeds. This implies that the owner of the original self-replicating machine will retain rights on all subsequent generations according to the precedent of Monsanto versus Bowman. This is a worrisome prospect.
Conclusions
It is estimated that a self-replicator prototype could be developed within 6 years with a cumulative budget of $12–15 M. A flight version would take a further 2–3 years to enhance the self-replicator reliability and its applicability to the Moon. Hence, a self-replicator could be delivered to the lunar surface within a decade. Assuming a 6-month replication time, it would take just 6 years to populate the Moon with 2 million self-replicating factories. Necessity is not the mother of invention as commonly espoused 26 —invention is directed to create necessity. This productive capacity on the Moon enabled by self-replicating machines may be exploited by the private sector in ways that are currently unimagined as the space sector opens to private ingenuity.
It has been contended that social progress, being subject to political whim, is random; whereas technological progress is directional, dictated by its own scientific logic. A utopian society may, thus, be defined as that which provides the political will to focus technological progress toward industrial sustainability and safeguarding the natural environment. 27 Perhaps this is so. According to this logic, space exploration can contribute to this utopian vision. The primary argument against the use of space resources for human utility is that the market (humans) is physically separated by considerable barriers from the resource locations on the Moon or asteroids. 28 However, this is true for material resources but does not apply to resources that can be delivered remotely—energy is one such commodity. The application of self-replicating machines on the Moon to the construction of swarms of Earth-orbiting solar power satellites is given in Ref. 29 This concept is based on 3D printing of the energy transduction chain from solar energy to the magnetron to generate beamed microwave energy transmission to the Earth. The transmission of clean energy from space to the Earth is both feasible and desirable.
In general, an economy that leads an innovation will maintain an economic lead over an economy that copies and adopts the innovation. The production function of an economy is defined by the relationship between the productive output and the deployment of resource inputs. It defines the efficiency of the economy in the allocation of resources. There are two ways to foster economic growth—either increase the amount of labor and capital in the economy or increase the productivity of the economic actors. There are diminishing returns to labor and capital investments. The Solow model declared that sustained economic growth is dominated by per capita increases in productive capacity due to technological advancement. 30 Such technological innovation accounted for 85% of economic growth in the United States in the period 1870–1950. Scientific and technological innovation has had a primary role in enhancing economic productivity in Organisation for Economic Cooperation & Development (OECD) countries driven by ICT. 31 Similarly, the self-replicating machine offers the prospect for an internet of manufactures as a development of the internet of things enabled by a networked society. Such a vision would require robust user interfaces to cross the chasm from early adopters to the majority market. The future is pregnant with possibilities. But technological innovation requires entrepreneurial innovation—for self-replicating machines, the former is flourishing whereas the latter is floundering. The entrepreneurial world appears not up to the task in quite the way described by Peter Diamandis.
Footnotes
Acknowledgment
This work was partially supported by the National Science and Engineering Research Council of Canada.
Author Disclosure Statement
No competing financial conflicts of interest exist.
Appendix: Artificial Intelligence Requirements for Self-Replicating Machines
Remote teleoperation of ISS-board microgravity experiments (telescience) from the Earth are simple with few external perturbation events and with tolerable time constraints. Lunar activities monitored from the Earth, however, will involve time delays as well as more complex operations. Teleoperation on the Moon involves signal propagation and network time delays imposing inefficient move-and-wait protocols in performing tasks remotely. Such time delays introduce instabilities, particularly in interaction forces between tools and the environment. To compensate for this time delay, the local simulation at the ground operator must predict delayed events at the remote robot. This is typically achieved through predictive displays to simulate the remote robot and its environment. There a number of mechanisms for implementing predictive dynamics—Smith predictor, neural network controller, fuzzy logic, or a combination of these. 32 An alternative approach is to employ time and position clutches that allow control between the local simulation and the remote robot to be desynchronized. 33 The ultimate expression of such desynchronization is to implement greater autonomy at the remote robot. This allows supervisory control where the remote robot operates autonomously and invokes human operator interaction only during exceptional states. Ultimately, the goal is to implement full autonomy without the requirement for human intervention even under fault conditions.
We first consider approaches to spacecraft autonomy. Current spacecraft operations are based on uploaded scripts with time-tagged sequences of commands. If off-nominal conditions occur, the spacecraft is entered into safe mode until the problem is resolved by human interaction from the ground. Spacecraft autonomy involves imparting the spacecraft with the capacity to generate its own plans and to re-plan if necessary based on theorem-proving methods. The plan constitutes a set of actions that will transform the current state of the world into a goal state. This involves applying logical operators that have conditions defining their applicability and actions that dictate their effects: IF (c1…cn) THEN ai. Conditions can invoke multiple actions that must be prioritized with respect to constraints on available resources such as time, energy, or conflicts. This is the deliberative component. Execution of those plans is monitored to detect plan failure—this is where the reactivity component is implemented. Plan failure invokes fault detection, isolation, and recovery techniques. It typically results in adding further subgoals to the original plan to solve the current problem before pursuing the original goals. Some advanced artificial intelligence techniques applied to advanced spacecraft are reviewed in Ref. 34
Robotic operations on the Moon will involve the control of rover vehicles and attached robotic devices. Reactive control methods can accomplish sophisticated capabilities. Blind bulldozing by swarms of robotic excavator vehicles can be exploited for worksite preparation such as leveling and/or paving operations.
35
Blind bulldozing may be based on simple ant-like behaviors that plough material outward until a force threshold is measured. Stigmergy controls the construction process in that ploughed material creates walls of increasing strength determined by the distance along which the accumulating material has been pushed. Hence, current/final nest size is determined by:
where FT = threshold force, Fi = current push force, ρ = soil density, b = tool width, and r0 = initial nest radius. Braitenberg-style neurocontrollers can generate action sequences to build walls, corridors, intersections, and briar patches. 36 For more sophisticated goal-directed rover capabilities, mapbuilding is necessary. Self-location and mapping are well established in mobile robotics. The Kapvik micro-rover is a representative general-purpose end-to-end prototype that is designed for the Moon and Mars 37 and that employs a Kalman filter-based autonomous navigation system. 38 Bayesian methods have also been applied to planetary micro-rover applications to represent the properties of the cells of an occupancy grid for map-based navigation. 39 Similarly, load-haul-dump mining vehicles require terrain maps to navigate effectively within tunnels. 40 They are similar to indoor environments by being highly constrained where no GPS signal is available. Similar to underground mining, automated guided vehicles are commonly adopted in flexible manufacturing systems (FMS) to transport material within the factory. 41 They also require planning so that scheduling is in real time and routing occurs without collision with other vehicles to ensure the timely delivery of material at the appropriate locations. They must maximize throughput while minimizing waiting times. Within such constrained environments, potential field techniques are well suited. 42 Online measurement of soil properties may aid tractive performance of such vehicles, especially slippage. 43 For the coordination of multiple robots, robot motion must be synchronized in cooperative tasks such as in the maintenance of fixed kinematic relations between robots (e.g., two robots grasping a common payload). 44 More loosely, soccer robotics is a culmination of the problem of multi-robot cooperation toward a specific goal while coping with static and dynamic constraints. One possible approach (among many) is to treat each robot as a knowledge-based agent that cooperates through a distributed blackboard (shared virtual global memory). 45 Multiple knowledge-based expert systems operate in their own specialized domains but communicate with each other through the blackboard to cooperate to solve global problems beyond individual capacities.
Excavation is a control process that involves sensors to detect the current configuration of the local terrain compared with a goal configuration of the terrain, and it uses the difference to generate a stepped sequence of robotic actions to progressively reduce that difference to zero subject to constraints such as minimum energy costs. Manipulator actions are digging trajectories—a dig may be characterized parametrically by three parameters that determine the excavated volume (action space): approach angle of the blade from horizontal α, height of blade entry into the terrain above datum h, and dig distance from entry into the terrain d.
46
Candidate action spaces (similar to configuration spaces in manipulators) are defined as feasible but suboptimal, feasible and optimal, and infeasible (similar to cells in grid-based mapbuilding in mobile robots). Once an action space has been selected, a bucket trajectory may be defined in joint space by using standard inverse kinematics. The force required to excavate is given by:
where
Once the desired materials have been extracted, manufacturing is the next stage. Flexible manufacturing permits variations in time regarding the manufacture of multiple parts. There are several generic problems associated with flexible manufacturing: (i) part selection, (ii) machine grouping, (iii) part ratio production, (iv) resource allocation, and (v) line loading.
49
Scheduling problems form a common theme in many of these tasks from job-shop scheduling to assembly-line balancing. Petri nets constitute a graphical method to represent events and their relations that can graphically model, analyze, and synchronize the execution of complex parallel and serial manufacturing procedures. They comprise directed arcs that are a link between two different types of nodes—place and transitions. Petri nets can be integrated into complementary techniques such as the structured analysis and design technique.
50
There are many different varieties of Petri nets, including colored timed object-oriented Petri nets that are suitable for representing the dynamics, time duration, and scheduling aspects of flexible manufacturing, including automated guided vehicle routing.
51
In particular, deadlock detection and recovery through resource re-allocation is essential. Hybrid Petri net-automata promise a unified approach to modeling and analyzing workshop flow.
52
Neural networks may be used to model complex manufacturing processes.
53
Neural nets have been used as process models for manufacturing, particularly because the input-output training compensates for any ill-posed underlying mechanisms.
54
A neural network-based production system offers superior performance to decision trees (ID3) for material scheduling and routing in a flexible manufacturing cell of several machine tools.
55
Job-shop scheduling must allocate jobs to machines: A number of jobs n comprising a number of subjobs k (sequence constraint) are allocated to m machines (resource constraint). The scheduler must specify a start time for subjobs to achieve a desired result based on the processing time for each subjob. The expert system with if-then production rules (fuzzy or crisp) in conjunction with the genetic algorithm search for the shortest time solutions is suited to job-shop scheduling.56,57 Neural networks have been applied to stringent real-time job scheduling and planning problems. Job scheduling to minimize job completion time for n jobs subject to resource constraints such as m machines is an non-deterministic polynomial-time (NP)-hard schedule optimization problem. The Hopfield net is an example of a neural network that is suited to the job-shop scheduling problem.
58
It involves determining the sequences of jobs according to the resources available and performance criteria. Mathematically, performance may be defined as
59
:
where wi = delay penalty/time (weighting), Δt = completion time, tf = delivery date, and n = number of jobs. The solution is given by the minimum quadratic energy configuration of the Hopfield net of mn(mn +1)/2 neurons corresponding to minimizing the job start times. Neural networks can select rules for scheduling jobs and machines for FMS according to input patterns, whereas expert systems can interpret constraints imposed such as timing.
60
Any work piece undergoes a number of operations where the output of one operation feeds into the input of another. Machine selection is dependent on the input parameters such as workpiece material and geometry, jigging, and machining cutting (force, power, and roughness of finish). A neural net scheduler has been used to schedule job shops by optimizing start times.
61
A genetic algorithm was used to generate optimal schedules of job sequences. Recurrent neural networks have also been used to minimize the cycle time of job-shop schedules.
62
The constraints include the number of machines, number of jobs, set of operations, and precedence constraints. The recurrent neural network was input with start time and schedules and used an energy function to perform a steepest descent of the form
Once parts have been manufactured, individual parts must be assembled through a sequence of operations into a final product with well-defined geometric relations between the parts. Assembly plans are ordered sequences of operations that transform one configuration of parts into another. The parts are defined by their relative positions, which are bound in an assembly. A relational model of assembly may be defined as (P, C, A, R, α) where P = part, C = contact surface between pairs of parts, A = attachment between pairs of parts, R = (P U C U A) = relationship between pairs of parts, and