
Abstract
Abstract
OrbitBeyond, Inc. is a new U.S.-based lunar transportation company. In 2020, it plans to land its Z-01 lander and Ek Choti si Asha (ECA) rover in Mare Imbrium on the Moon. The landing site (29.521°N, −25.680°E) is characterized by anomalously young (∼2.3 Gyr old) lava flows and anomalously high-Ti content (∼7 wt.%). Exploration of this area will provide the opportunity to address key lunar scientific knowledge gaps regarding the volcanic history of the Moon. We introduce a Design Reference Mission that aims to maximize the scientific return from the OrbitBeyond Z-01 mission utilizing the nominal mission payload (Case 1), and the nominal payload plus one additional instrument on the rover (Case 2). We (1) provide regional scientific and geologic context of Mare Imbrium, (2) outline key science goals that can be accomplished with this mission and the required scientific objectives that must be addressed to accomplish these goals, and (3) develop a set of scientific targets and observational parameters to help integrate science activities into the currently engineering-based rover traverse algorithm. This collaboration between engineers at OrbitBeyond and student scientists at Brown University helps pave the way for successful science and engineering synergism in future commercial exploration of the Moon.
Introduction
OrbitBeyond, Inc. has been granted part of a $2.6 billion NASA Commercial Lunar Payload Services (CLPS) contract, allowing it to bid for delivering science and technology payloads for NASA; this is a major step toward long-term scientific and human exploration of the Moon and eventually Mars. The CLPS contract will financially help OrbitBeyond to provide the means for lunar transportation and exploration, and will serve a broad community of scientists, engineers, and private investors. OrbitBeyond has engaged Google Lunar XPRIZE frontrunner TeamIndus for Lander engineering, Honeybee Robotics for payload integration, Advanced Space for Mission management, Ceres Robotics for surface operations, and Apollo Fusion for future programs.
In collaboration with TeamIndus and its other partners, OrbitBeyond plans to land its Z-01 lander on the Moon in 2020. The lander will carry the Ek Choti si Asha (ECA) rover (Fig. 1). The microclass ECA rover weighs only 7.5 kg and was engineered primarily to meet the goals of the Lunar XPRIZE competition: traverse the lunar surface for a minimum of 500 m while acquiring high-definition images and video. Therefore, during mission development, there was little consideration of the potential scientific return that could be accomplished with the Z-01 mission. Although the first OrbitBeyond missions do not have the specific goal of scientific return, OrbitBeyond understands the many important scientific avenues of lunar exploration, including (1) developing the Moon into an easily accessible scientific laboratory, (2) using the Moon for future in situ resource utilization for exploration of deep space, (3) producing a long-term, stable lunar habitat for humans, and (4) using the Moon as a road to Mars and beyond. This understanding is critical for the success of OrbitBeyond as a collaborator with scientists.
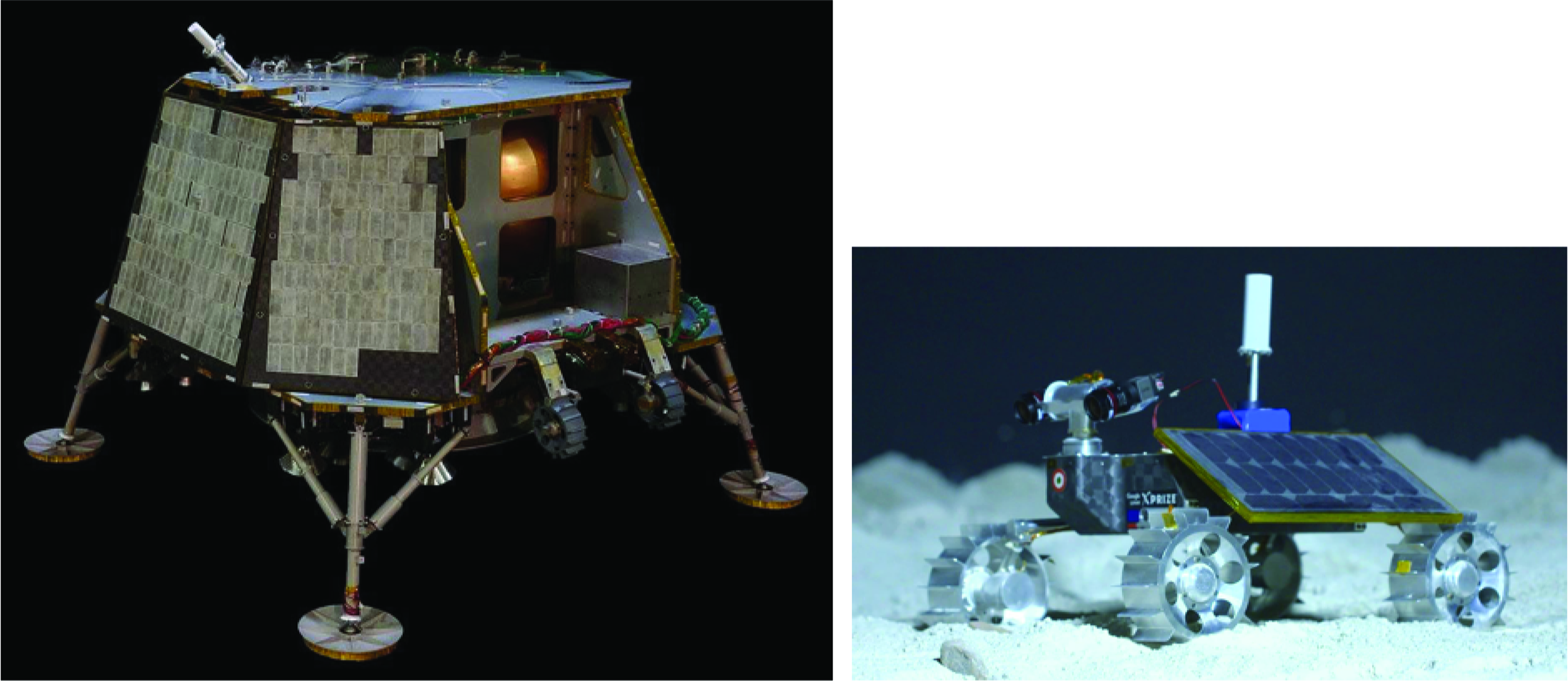
Z-01 lander (left) and ECA rover (right). The nominal lander payload includes solar panels and onboard sensors. Also featured in the image of the lander is the storage location of the rover before deployment onto the surface. The lander is 3.4 m wide and is 1.87 m tall at launch and ∼2.96 m tall on the surface, postantenna deployment. The nominal rover payload includes solar panels, 2 mast cameras, a HAZ camera, a rear-facing fish-eye camera, and a QFH antenna. The dimensions of the rover are 50 cm tall × 50 cm in length. ECA, Ek Choti si Asha; HAZ, hazard; QFH, quadrifilar helix. Color images are available online.
The targeted landing site for the Z-01 mission is located in Mare Imbrium (Fig. 2), a region of smooth volcanic plains, which is a safe and relatively flat surface for the rover to traverse across. The landing site is also located within a region that hosts a diverse and unique volcanic history; exploring this region of Mare Imbrium with a lander and rover can provide critical insight into many aspects of the evolution of the Moon.

The Imbrium Basin (1,145 km in diameter) is outlined by the white box on the left and enlarged on the right. The Z-01 Mare Imbrium landing point (29.521°N, −25.6801°E) is marked by the red triangle. Color images are available online.
As engineering and technological advancements begin to make commercial planetary exploration through private industry a reality, scientists are beginning to take advantage of the opportunities to collaborate with these companies to maximize the scientific return of their missions. One specific example is the existing collaboration between Brown University and OrbitBeyond. In the Fall 2018 academic semester, a Solar System Exploration Research Virtual Institute (SSERVI)-sponsored course entitled “Origin and Evolution of the Moon” was offered in the Department of Earth, Environmental and Planetary Sciences at Brown University. Driven by the outstanding questions that arose in this seminar course and the fact that the OrbitBeyond landing region contains critical information for understanding many aspects of the evolution of the Moon, we initiated a collaboration between the student scientists at Brown University and the engineers at OrbitBeyond with the goal of maximizing the scientific return of their first lunar mission. Specifically, we have developed a scientific Design Reference Mission (DRM) for the exploration of Mare Imbrium with the Z-01 lander and ECA rover, which we present here.
We begin by introducing a geologic characterization of the landing site, which serves as a basis for defining key scientific goals that can be accomplished with the lander and rover during the ∼10-Earth-day mission lifetime (Geologic Characterization of the Z-01 Landing Site section). After an analysis of the lander and rover payloads (Z-01 Lander and ECA Rover Payloads section), we describe our scientific DRM, in which we outline the specific measurements and observations that the lander and rover must make in order to accomplish the key scientific goals (The Design Reference Mission and Predicted Scientific Return section). We analyze the scientific return that can be acquired for 2 cases: Case 1, in which we consider the current, nominal rover payload, and Case 2, in which we consider the addition of one instrument to the rover payload. Finally (Traversing the Lunar Surface section), we outline targets that are of important scientific interest for making the necessary observations and measurements to maximize the scientific return of the mission and accomplish the key science goals, and then discuss the inclusion of these targets into the currently engineering-based rover traverse algorithm.
Geologic Characterization of the Z-01 Landing Site
The Z-01 landing site is a 1 km-radius ellipse centered at 29.521°N, −25.680°E, within Mare Imbrium (Fig. 2), a vast volcanic plain located within the Imbrium Basin. The Imbrium Basin is one of the Moon's largest impact structures (∼1,145 km in diameter) and is estimated to have formed ∼3.9 Ga.1–4 The basin is surrounded by three concentric chains of mountains, although the innermost chain has largely been flooded by mare basalts. Also surrounding the basin are vast regions of impact ejecta, extending ∼800 km radially outward from the basin rim, and patterns of grooves, lineations, and elongate craters, known collectively as the Imbrium Sculpture (e.g., Ref. 5 ).
Since the time of its formation, the Imbrium Basin has been flooded and resurfaced by multiple volcanic events (e.g., Refs.6,7) and the regional volcanic history is notoriously complex. Bugiolacchi and Guest 6 traced albedo and hue boundaries within the maria using multispectral Clementine maps and identified 102 potentially distinct mare units. Further analysis of the Clementine UVVIS chemical data, including TiO2 and FeO abundances (e.g., Ref. 6 ), Earth-based radar data (e.g., Ref. 8 ), and Clementine color images 7 in Mare Imbrium, shows that many of these smaller units are part of larger units sourced from one volcanic phase, and that there are likely to be over 30 distinct mare units in Mare Imbrium (e.g., Refs.6–8 ). Analysis of radar data of the different units revealed a potential stratigraphy underlying the current mare surface within the Imbrium Basin, 8 implying that the Z-01 landing site rests on a stratigraphic sequence characterized by multiple lava surfaces emplaced on top of one another through time. Some lava flow fronts are visible in the region in topographic data, low-illumination angle images, and detrended topographic data9,10 (Fig. 3), implying that many episodes of volcanic activity occurred in this region and that the signature of this recent activity is still preserved on the lunar surface today.
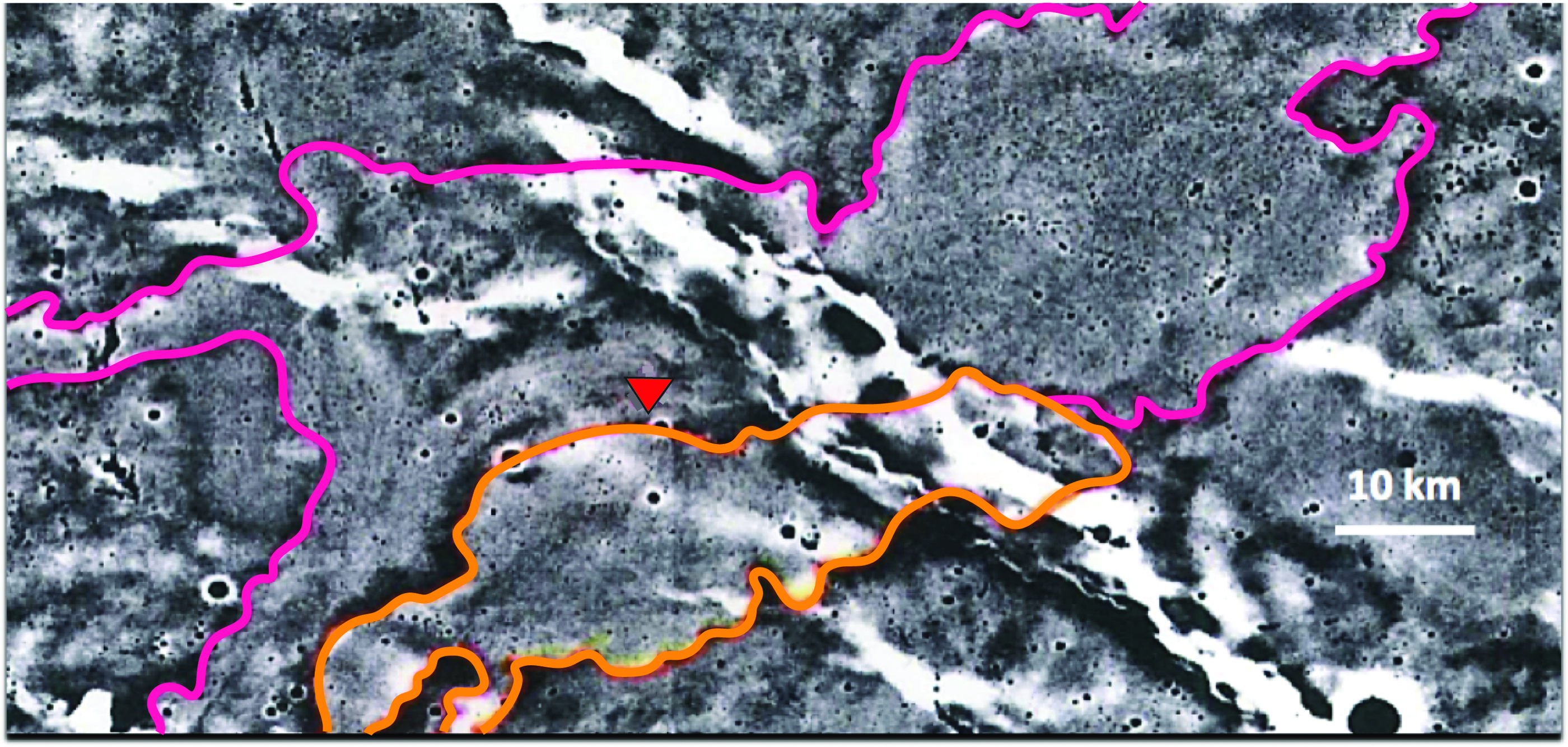
Detrended LOLA topography data of the Mare Imbrium region. 9 Regional lava flow fronts 10 are outlined in orange and pink, and additional lava flow fronts can be resolved with higher resolution imagery (e.g., Fig. 7). The location of the landing ellipse (2 km diameter, centered at 29.521°N, −25.6801°E) is marked with a red triangle. A 10 km scale bar is shown. LOLA, Lunar Orbiter Laser Altimeter. Color images are available online.
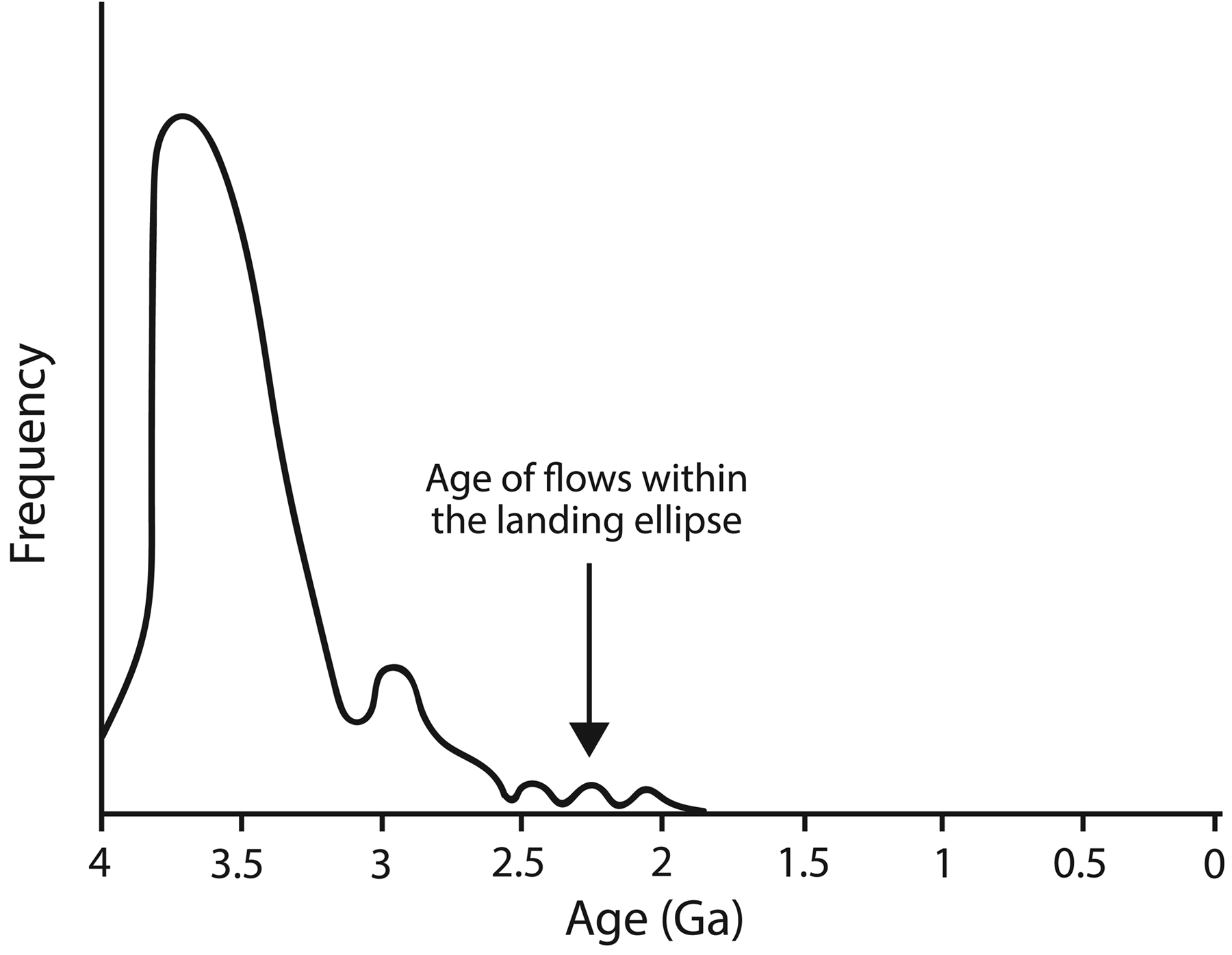
Volcanic activity on the Moon was long lived, and the ages of individual mare units within the Mare Imbrium span nearly 1.5 Gyr6,7 (Fig. 4). The landing site is located within one of the youngest units within Mare Imbrium, estimated to be ∼2.3 Gyr old. 7 This unit is one of the youngest volcanic units on the entire lunar surface 11 (Fig. 5); the majority of lunar effusive volcanism peaked between 3.5 and 3.8 Ga. 11 Thus, exploration of the young lava flows within the landing ellipse will provide unique information about recent volcanic activity on the Moon that cannot be acquired at most other locations. More specifically, this mission has the opportunity to help us to understand the characteristics and dynamics of magma degassing late in lunar history (e.g., Ref. 12 ). Observations of multiple lava flows and exposed lava stratigraphy would demonstrate how the dynamics of degassing of magma has evolved through time (e.g., Ref. 13 ).
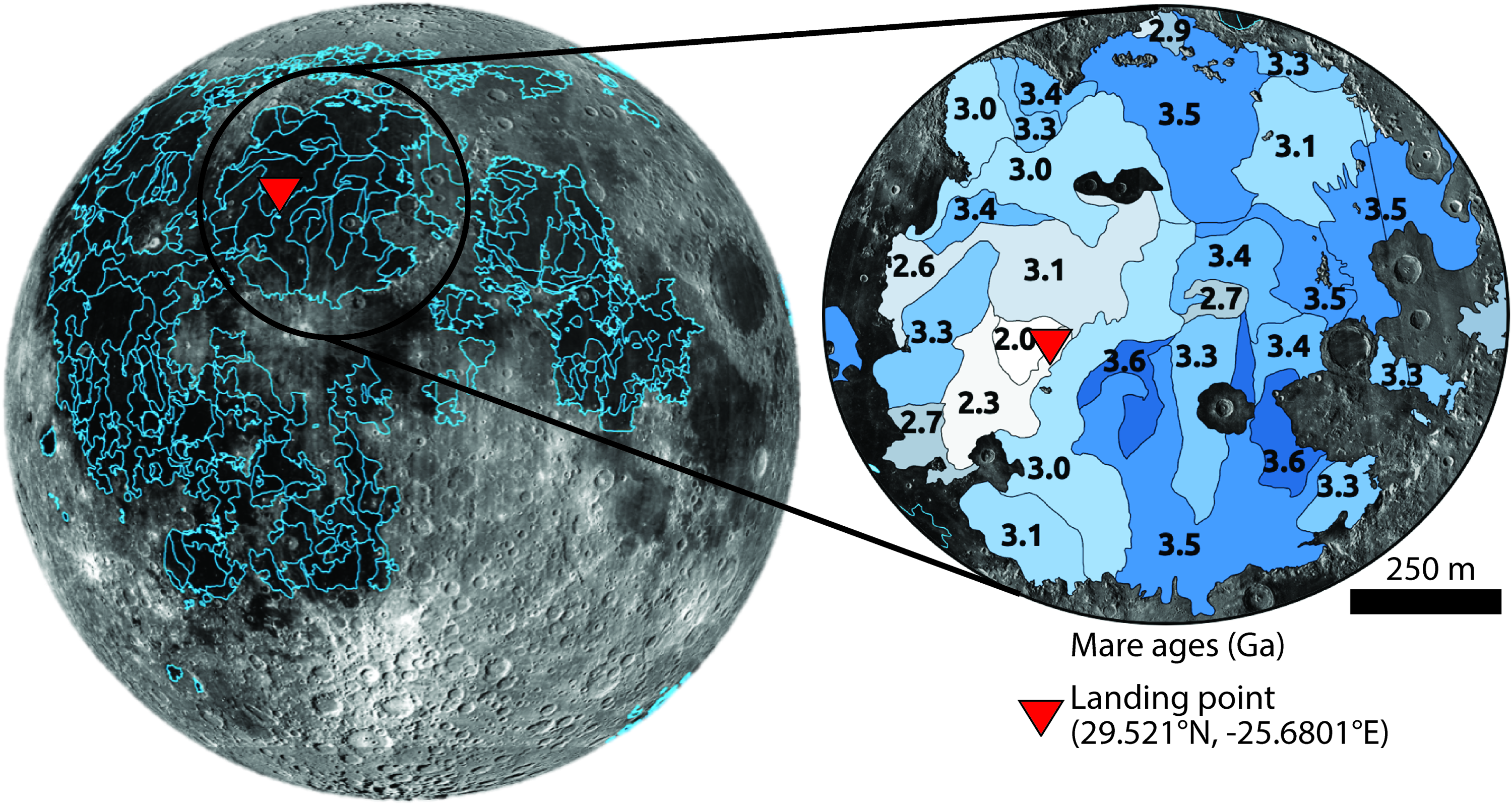
Left: Map of all mare units with individual units outlined in blue. Right: Mare units within Mare Imbrium labeled with unit ages. The oldest units appear shaded in dark blues and the youngest units appear shaded in light gray. The landing point (29.521°N, −25.6801°E), marked by the red triangle, is located within some of the youngest flows in Mare Imbrium, estimated to be ∼2.3 Gyr old. Data from Ref. 7 Maps are in orthographic projection. Color images are available online.
The landing site is also located in a region of anomalously high-Ti basalts (∼7 wt.%).6,14 High-Ti basalts are typically correlated with ancient volcanic deposits on the Moon and are believed to be strongly connected to the overturn and remelting of ancient lunar deposits. 15 Exploration of these anomalously young Ti-rich flows offers the possibility to better understand the evolution of lunar melts and mantle heterogeneity through time.
Understanding the physical reasoning for the unique characteristics of this region, including the presence of young volcanic deposits with a high-Ti signature, can also provide important insight into geologic variations between the Z-01 Mare Imbrium landing site and other nearby landing sites that were explored during previous lunar missions, including those of Luna 2, Luna 17, Apollo 15, and Chang'e-3. Comparing the results of this mission with the results of previous lunar missions will improve our understanding of lateral variations in volcanic activity within Mare Imbrium and, thus, the overall volcanic evolution of the Moon.
We believe that the exploration of Mare Imbrium with the OrbitBeyond Z-01 lander and ECA rover can improve our understanding of (1) the generation, ascent, and eruption of magma on the Moon and (2) regional geologic variations within Mare Imbrium and beyond. We classify these two topics as the key scientific goals of the mission (Table 1).
Key Scientific Goals and Objectives Outlined in Our Design Reference Mission for Cases 1 and 2
Completing these goals and objectives will maximize the scientific return of the mission and improve our understanding of lunar geologic history.
Z-01 Lander and ECA Rover Payloads
Z-01 Lander Payload
The nominal payload on the Z-01 lander (Fig. 1) is comprised of (1) onboard sensors and (2) solar panels. The onboard sensors include visible imaging cameras to photograph the surface and laser altimeters to provide data to derive altitude during the descent phase. Specific orientation with respect to the Sun is required for mission success because both the lander and rover have solar panels on only one side to minimize spacecraft mass; the spacecraft must land such that the paneled side of the lander faces the Sun. To ensure high-precision landing within the predefined landing ellipse at the appropriate orientation, the descent phase will be entirely controlled by software onboard the spacecraft. Specifically, OrbitBeyond has developed a “Vision-Based Absolute Navigation” capability that utilizes multiple algorithms to determine terrain-relative position of the spacecraft based on the identification of known nearby craters through real-time, automated analysis of images that are collected during the descent phase. With knowledge of the relative location of the spacecraft and orientation of the Sun using Sun sensors, the onboard computer will orient the spacecraft such that the solar panels will be facing the Sun upon contact with the surface.
ECA Rover Payload
The nominal payload on the ECA rover (Fig. 1) includes (1) a quadrifilar helix (QFH) antenna, (2) a stereo imaging mast camera, (3) a hazard (HAZ) camera, (4) a rear fish-eye camera, and (5) a solar panel. The QFH antenna will transmit data from the rover to the lander, which then transmits data back to the Earth.
The mast cameras are complementary metal-oxide semiconductor (CMOS)-based dual stereo cameras that image and record the surface with a C-mount lens. Color images are collected with a global shutter and readout through a progressive scan. The images have a resolution of 2048 × 2048 pixels, where each pixel is 5.5 μm. The mast cameras will be used for (1) traverse navigation, (2) site reconnaissance, (3) video capture, and (4) near real-time video streaming. Images will be acquired for traverse navigation, specifically for path planning and visual odometry, at a rate of 2 images per drive step over the course of 50 ms, where a drive step is ∼80 cm on average (Table 2). These images can be either grayscale (generating ∼2.58 megabits [Mb] of data per drive step that consumes 14.5 W of power) or RGB (generating ∼7.74 Mb of data per drive step that also consumes 14.5 W of power).
Important Parameters for Mast Camera Usage While Driving, Taking a Panorama Image, Recording Video, and Transmitting Data Back to Earth
As part of traverse navigation, stereo-pair images that are collected by the mast cameras can be used to make digital elevation models of the local lunar terrain. Panoramic imaging for the purpose of site reconnaissance will be conducted when the rover is static, for a complete angular coverage of 360°. For a single panorama, 16 images will be acquired over 240 s with a 50% overlap rate for smooth stitching (Table 2). These panoramas can also be grayscale (generating ∼18.07 Mb of data) or RGB (generating ∼54.21 Mb of data). Baseline science observations are defined by 4 panoramas over the mission lifetime.
Finally, RGB video will be both recorded at high definition (resolution of 720 vertical lines) and live-streamed to Earth at lower resolution with a fixed lag of <5 s. Streamed video can also be stored in a high-definition version for later transmission. The maximum continuous video duration is 4 min, generating 535.64 Mb of data (Table 2). Baseline science observations are defined by 4 videos over the mission lifetime.
In addition to the mast camera, a front-facing HAZ camera will collect high-definition images of the surface, which will be used to navigate the rover in real time to avoid traverse hazards such as boulders, areas of high slope, areas of shadow, and regions out of line of sight of the lander, which is required for continuous communication.
The rear camera has a fish-eye lens with a 2 mm focal length and will image the lunar surface behind the rover. The rear camera, similar to the mast cameras, operates from a CMOS-based color sensor. The images have a resolution of 1600 × 1200 pixels, where each pixel is 4.5 μm.
Finally, the solar panel, which is affixed to the port side of the rover, provides the necessary power for rover operations. The position of the solar panel defines the optimal driving direction to maximize charging. The rover is capable of traversing for short periods of time without the solar panels directly facing the Sun. In this manner, the rover is capable of traveling in directions not optimized by the solar panel placement via movement analogous to tacking a sailboat to move forward against the wind.
The rover has 32 Gb of memory. By consistently downlinking to Earth, onboard memory management ensures that only a fraction of this memory is used. In total, 6 days of the 10-day mission lifetime are devoted to science operations. This timeline will include ∼10 h of drive time to cover the desired distance of 500 m, given that each drive step takes ∼1 min. Between drive steps, the rover is required to stop for a minimum of 5 min to allow for rover cooling and charging. During this time, the Earth-based mission operations teams will collect telemetry and communicate with the rover. It is possible to make additional science observations during cooling periods, however, the rover will not make observations during charging periods to allow for efficient recharging. During the first half of the lunar day, the rover will spend increasing amounts of time cooling and for the second half of the lunar day, the rover will similarly spend increasing amounts of time charging.
The DRM and Predicted Scientific Return
Our team, comprised of scientists and engineers from academia and the commercial space industry, represents a diverse group of individuals whose common goal is to determine how to maximize the scientific return of the OrbitBeyond Z-01 Mare Imbrium mission.
To produce a successful DRM, we have completed a range of analyses, including (1) performing in-depth geologic analyses of the landing site (Fig. 6) to provide context of regional geologic units, ages, potential geophysical and geomorphic processes that shaped the terrain, and what units are accessible for measurements and observations by the rover; (2) interpreting the engineering constraints of the mission to help consider how the current, nominal payloads of both the lander and rover can be further utilized for scientific purposes; (3) identifying specific measurements and observations that can be made by the rover and lander to address key scientific goals; (4) considering additional instruments that could be added to the rover payload to further enhance the scientific return of the mission; (5) performing regional geologic and context mapping of the landing site (Fig. 6) for observational and traverse planning of the region, including mapping of impact craters and lava flow fronts within the landing ellipse; (6) incorporating all data sets to design a set of parameters that can be used to integrate science activities into the rover traverse along with the necessary engineering constraints.
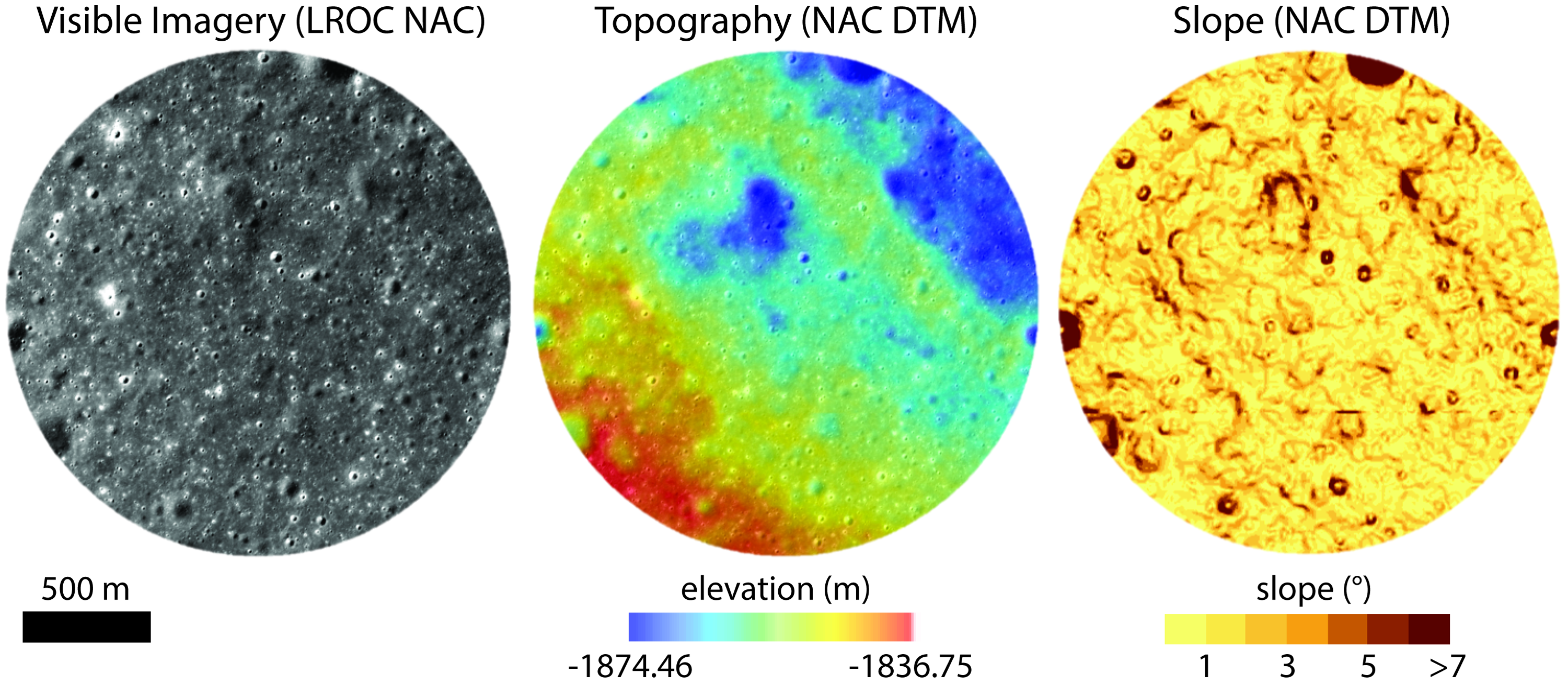
The 1 km-radius Z-01 landing ellipse in Mare Imbrium, where high-resolution LROC NAC imagery is available. The landing ellipse is centered at 29.521°N, −25.6801°E. Left: Visible imagery from the LROC NAC (pixel resolution of ∼5 m). Center: Topography derived from an NAC DTM. The overall relief within this central region of the landing ellipse is ∼38 m. Right: Slope map derived from an NAC DTM. Slopes >7° are highlighted in dark red and largely correspond to crater walls. DTM, digital terrain model; LROC, Lunar Reconnaissance Orbiter Camera; NAC, narrow angle camera. Color images are available online.
Our analysis is divided into 2 parts: Case 1, in which we explore the scientific return that is possible with the current lander and rover payloads, and Case 2, in which we explore the further scientific return that is possible with the addition of one instrument to the rover payload. The results of our DRM are shown in Table 1, highlighting the ways in which we can use the current payload and the payload with one additional instrument to address the key scientific goals of the mission: (1) improve understanding of the generation, ascent, and eruption of magma on the Moon and (2) improve understanding of regional geologic variations within Mare Imbrium and beyond.
Case 1: Nominal Rover Payload
To address the 2 key scientific goals of the Z-01 mission, we have identified scientific objectives that should be accomplished. The first key scientific goal of the mission is to improve the understanding of the generation, ascent, and eruption of magma on the Moon (Table 1). Specific objectives that can be accomplished with the current mission payload include the following:
Image the vertical stratigraphy within impact craters to characterize the sequence of lava flows. Accomplishing this objective will provide measurements of the thickness of individual lava flows, which is important for constraining key magma characteristics, such as viscosity. Image the materials within vertical strata to characterize the properties of erupted magma through time. Accomplishing this objective will help better permit observations of the characteristics the emplacement of lava flows through time, such as the role of volatiles and depth of magma generation. Image the local landscape to characterize extent, topography, and geometry of the lava flows. Accomplishing this objective will provide information about changes in effusion rate and viscosity of magmas through time. Image individual lava flows to measure the distribution, shape, and size of vesicles. Vesicularity is dependent on multiple important magmatic parameters that provide insight into the characteristics of volcanism through time, including temperature, bulk composition, volatile species, and viscosity. Accomplishing this objective will provide insight into the roles of gas and volatiles in the magmas during the time of emplacement of specific volcanic flows. By comparing vesicle characteristics between lava flows of different ages, we can study how these magmatic characteristics have changed through time. Image individual lava flows to constrain the texture and grain size of the solidified lavas. Accomplishing this objective will provide information about magma evolution and eruption conditions through time. Image individual lava flows to measure differences in tonality within the visible spectrum. Accomplishing this objective may provide information about the relative Fe content and charge in individual lava flows. If these data can be successfully calibrated to confirm that the tonality changes are due to Fe content and oxidation state, this information could provide important insight into the magma conditions at the time the flow was emplaced. By extension, these observations can improve the understanding of magma evolution through time by providing constraints on the local eruption conditions within Mare Imbrium at the time the flows were emplaced.
The second key scientific goal of the mission is to put the scientific results of this mission into a regional perspective to provide an understanding of regional geologic variations on the Moon (Table 1). Specific objectives that can be accomplished with the current mission payload include the following:
Image the contacts between morphologically fresh crater ejecta and nearby regolith. Accomplishing this objective will provide information about variations between fresh and degraded material on the Moon, which is important for our understanding of how lunar regolith changes through time as it is exposed to the space environment.
Image regolith ahead of the rover and behind the rover to analyze disturbed regolith along wheel tracks. Accomplishing this objective will help us to characterize grain size and cohesion of the lunar regolith, as well as differences in tonality between the freshly exposed material and material that has been exposed to surface radiation and micrometeorite bombardment for longer periods of time, thus providing an estimate of the depth to which space weathering affects lunar material.
Collect diagnostics on hardware performance to analyze environmental conditions, such as meteorite bombardment and moonquakes, throughout the mission. Accomplishing this objective and understanding the ways in which these materials are affected by the space environment are important for feeding forward into future robotic and human missions to the Moon and beyond.
Place results in context of past mission data to compare geologic observations at the OrbitBeyond landing site with nearby heritage sites, including the Apollo 15 and Chang'e 3 missions. Accomplishing this objective is important for understanding the context of measurements made by the Z-01 lander and ECA rover and for understanding regional variations within Mare Imbrium.
It is clear that measurements acquired by the nominal payload can accomplish multiple scientific objectives that are important to our understanding of lunar volcanic history. The majority of these objectives can be met through a variety of imaging campaigns with the rover's cameras. During active roving phases, the mast cameras will acquire 2 images per drive step. These images are captured in 50 ms and generate ∼2.58 Mb of data (Table 2). Reconnaissance with the mast cameras will achieve 360° angular coverage in 16 images in 240 s, generating 18.07 Mb of data (Table 2). We require baseline measurements of 4 panoramas over the mission lifetime. Video capture (through both recording and subsequent forwarding, as well as near real-time streaming) will provide an additional 535.65 Mb of data for 4 min of continuous video (pixel resolution 720 vertical lines) (Table 2). Baseline science observations require 4 videos over the mission lifetime. Through the combination of imaging data acquired during active roving phases (single-frame images and video capture) and during roving hiatuses (panoramas and video capture), the imaging campaigns that are required to accomplish the scientific objectives can be completed within the mission lifetime.
Specifically, cameras can be used for (1) local geomorphic and geologic analyses, (2) investigation of macro-scale geologic and petrologic textures, (3) analysis of grain sizes and shapes, (4) analysis of tonality variations between different lava flows and between freshly exposed material and material subjected to the lunar surface environment for long periods of time, (5) quantitative measurements of surface features using stereo-derived digital elevation models. In addition, the spacecraft sensors and hardware, nominally included for engineering purposes, can be used to acquire key scientific observations and enhance scientific return: (6) the lander accelerometer can be used to monitor meteorite bombardment or moonquakes, data that can be compared with similar data sets from previous missions (e.g., Refs.16–18 ) and estimated values from numerical models (e.g., Ref. 19 ); (7) the lander descent cameras can be used postlanding to repeatedly image the surface for change detection analysis for the duration of the mission, and (8) the rover wheels can be used to study the physical properties of displaced regolith by collecting measurements of the required torque levels for movement.
Although there is potential for a significant scientific return from the Z-01 mission using the nominal lander and rover payloads (Table 1), many outstanding questions related to Mare Imbrium and the evolution of the Moon can be addressed with an understanding of the chemistry of the lava flows. In the following section, we explore how additional rover instrumentation may further enhance the scientific return of the mission.
Case 2: Nominal Rover Payload with the Addition of One Instrument
Given that OrbitBeyond is a lunar transportation company with capabilities for both in-orbit and on-surface payload deployment and utilization, and is currently booking payloads for its lunar missions, we also explore the scenario in which we add a single instrument to the ECA rover to further maximize the scientific return of the Z-01 mission. With images acquired from the rover cameras that are part of the nominal payload, we expect to be able to deduce qualitative first-order chemical differences, but these will be extremely limited; additional analyses with bulk chemistry measurements could provide much more valuable information. The inclusion of an instrument to measure bulk chemistry could greatly advance our scientific understanding of the geologic history of the Z-01 landing site and of lunar volcanic science in general.
Multiple analytical techniques are capable of quantifying the bulk chemistry of the local planetary surface from landed spacecraft platforms, including alpha particle X-ray spectroscopy (APXS),20–25 thermal emission spectroscopy, 26 X-ray diffraction, 27 gamma-ray spectroscopy, 28 and X-ray fluorescence spectroscopy (XRFS). 29 Although these analytical techniques and others would provide sufficient bulk chemical data that would greatly enhance the breadth of scientific return from a landed mission on the lunar surface, we focus below on 2 techniques that we feel are particularly applicable to the OrbitBeyond microclass ECA rover: APXS and XRFS. We focus on these techniques because they have been miniaturized for inclusion in small-form factor rovers, require comparatively low levels of power consumption, have spacecraft heritage, and are sensitive to Ti at high levels of precision. These instruments have been demonstrated in other spacecraft, field, and laboratory applications to be able to acquire data in the requisite level of precision to interpret sample bulk chemistry, as well as mineralogy and petrology (e.g., Refs.24,30).
Previous landed spacecrafts have utilized APXS, and thus, heritage spacecraft-ready APXS instruments already exist that are both miniaturized and fully passive.20–25 Because the APXS instrument has its own radioactive source to generate the necessary excitement for analysis, there is no electrical input required from the rover to generate the X-rays, only to count the scintillations on the detector.20–23 APXS is sensitive to a suite of rock-forming elements, 23 including ones critical for the study of lunar petrology, such as Ti, at high precision (e.g., Ref. 31 ). Accurate Ti abundances are valuable for analysis of lunar samples with volcanic origin (e.g., Ref. 24 ), and are particularly relevant for this region of anomalously high-Ti basalts. We propose that an APXS could be integrated onto a platform attached to the rover's undercarriage that could be lowered toward the surface to collect chemical measurements passively.
However, utilization of the APXS on the lunar surface and integration of an APXS onto the ECA rover introduce potential complications. First, the count times to estimate bulk chemistry are lengthy, which may inhibit rover operations and is critical to consider because of the short 10-Earth-day mission lifetime. Using previous lunar APXS applications as a guide, count times of 30 to 60 min can be expected for a single measurement. 24 Because all of the scientific mission goals and objectives can be met by visiting a small number of targets, including fresh craters, crater ejecta, regolith, and lava flow fronts (Table 3; see also Traversing the Lunar Surface section), it is likely that we can gather the necessary information through only 4 periods of investigation, which would require around 4 h of observation time. In addition, the rover will need an integrated detector to count scintillations,20–23 which requires some electrical input from the rover. To date, APXS instruments have only been produced by governmental space agencies for remote geological use on planetary missions.
Traverse Algorithm Science Inputs
We describe the target classes that must be observed to accomplish the mission objectives, the required orientation of the cameras at the time that the specific observations are made, the required measurement load, and the required observation periodicity.
An XRFS integrated onto the ECA rover could also evaluate bulk chemistry at pinpoint locations while avoiding the complications with APXS, although in exchange for other complications. Unlike the APXS, the XRFS does require energy from the rover to produce the X-rays. Overall, the power drain is not significant (∼3 A to operate), and handheld XRFS instruments (e.g., Ref. 30 ) have been developed that operate for several hours using only battery sources, demonstrating the low-power consumption that is required to utilize this instrument. Apart from requiring energy from the rover to operate, the XRFS, like the APXS, has many characteristics that make it applicable for OrbitBeyond's 10-Earth-day, microclass rover mission to Mare Imbrium. An XRFS would provide sufficient bulk elemental chemistry data to characterize potential chemical differences between multiple lava flows within the landing region; XRFS is sensitive to all elements heavier than sodium if the elements of interest are in sufficient abundance in the sample to be above a detection threshold (e.g., Refs.30,32). Similar to the APXS, we propose that the XRFS could be integrated onto a platform on the rover's undercarriage, which could be lowered toward the surface to collect chemical measurements passively. The XRFS is a reasonable instrument to integrate onto the rover to evaluate bulk chemistry because it requires little additional cost, space, or power, it does not require lengthy count times to estimate bulk chemistry (measurements with the XRFS take seconds, while measurements with the APXS take hours), it does not require a radioactive X-ray source, previous spacecraft missions have widely used XRFS (e.g., Refs.33,34), and there are likely fewer intellectual properties or other barriers given that modernized instruments are in development for landed spaceflight (e.g., Ref. 35 ). Using previous XRFS applications as a guide, count times of ∼1 min per measurement can be expected (e.g., Ref. 30 ). Assuming that around 4 periods of investigation are required to accomplish the scientific goals and objectives of the mission, ∼4 min of observation would be required. The shorter data acquisition duration could facilitate an increase in the number of spot analyses by the ECA rover.
With the addition of one instrument to the ECA rover payload, such as an XRFS or APXS, the bulk chemistry of the surface can be evaluated, and we can better address our key scientific goals (Table 1). Next, we outline the additional scientific objectives that can be accomplished if such an instrument is integrated into the rover payload.
With respect to the first key scientific goal of the mission, to improve the understanding of the generation, ascent, and eruption of magma on the Moon, additional scientific objectives that can be accomplished with an instrument that measures bulk chemistry, such as an XRFS or APXS, include the following:
Measure the bulk chemistry of the lava flows to study the major and trace elements in the local rocks. Accomplishing this objective will help us to better understand how the generation and eruption of magma have evolved through time locally.
Measure the bulk chemistry across lava flows and exposed layer stratigraphy to evaluate lateral and vertical variations in the major element chemistry of the flows. Accomplishing this objective will help us to understand the evolution of the magma that erupted onto the surface in the region through time.
With respect to the second key scientific goal of the mission, interpreting regional geologic variations, additional scientific objectives that can be accomplished with measurements of bulk chemistry include the following:
Measure the bulk chemistry of freshly exposed and more degraded materials to characterize the space weathering effects on regolith chemistry. Accomplishing this objective is important for constraining how space weathering products on the Moon vary through time.
Characterize the petrology of individual rock samples, outcrops, or suites that may be of historic interest, or of similar composition and origin to returned samples. Accomplishing this objective is important for understanding regional geologic variations in Mare Imbrium and elsewhere on the Moon.
Compare the bulk chemistry of the anomalously young lava flows in Mare Imbrium with bulk chemistry of lava flows elsewhere that have been measured during previous missions, such as returned volcanic samples from the Apollo missions, to study differences between major and trace elements in multiple locations on the Moon. Accomplishing this objective will help us to better understand the evolution of generation and eruption of magma over billions of years.
The findings of this portion of our DRM demonstrate that the addition of an instrument to the ECA rover to collect in situ bulk chemical data, such as an APXS or XRFS, can greatly enhance the scientific return of the mission.
Traversing the Lunar Surface
During its ∼10 Earth days on the lunar surface, the ECA rover is expected to traverse at least 500 m, make observations of its surroundings, and downlink high-resolution images and video in real time. Through a combination of a priori information and real-time adjustments, the rover will avoid an array of hazards, including high-slope terrains (>10°), shadowed areas (necessary because the rover relies primarily on solar power), impact craters (greater than some preidentified diameter threshold), and any terrain that removes the rover from the line of sight of the lander, thus preventing communication between the rover and lander.
The rover has specific energy and time constraints that guide its traverse capabilities, which are largely a function of the fact that the solar panels are positioned on only one side of the rover (Fig. 1). Due to these energy and time restrictions, the most favorable driving direction for the rover changes over the course of the 10-Earth-day mission. During the first 5 days of the mission, the most ideal driving direction to maximize solar energy inputs is toward the south-southwest. During the following 4 days of the mission, the Sun is positioned near local noon. During this time, temperatures are the highest 36 and the rover must remain inactive to prevent overheating of operational systems. For the remainder of the mission, the most favorable driving direction is toward the north-northwest.
As part of our DRM, we recommend including a set of parameters to help integrate science activities more efficiently into the traverse algorithm, which is currently focused on engineering constraints and hazard controls. Using Table 1, we identify target classes that can be broadly used to evaluate the scientific objectives. The 4 target classes of interest are fresh impact craters, crater ejecta, regolith, and volcanic flows (Table 3). For each target class, we also identify the specific preconditions for making a measurement; the time, power, and orientation required to perform each type of measurement; the data volume accumulated from each type of measurement at each station; and the periodicity at which the instrument data need to be downlinked to the ground (Table 3). All of these parameters together can be implemented into the traverse algorithm to solve for rover paths that are not only safe but also maximize the scientific return.
The first target class included in our list of science parameters for traverse is fresh impact craters. Within the central 500 m-radius region of the landing ellipse, where high-resolution Lunar Reconnaissance Orbiter Camera (LROC) narrow angle camera (NAC) coverage is available, >200 impact craters have been identified with diameters >10 m (Fig. 7). Observations of larger craters are preferred because they excavate more material (e.g., Refs.37,38), probing deeper into the subsurface, and thus may expose additional layers of crater stratigraphy. To study the sequences of lava flows, we propose to image crater stratigraphy, which is better exposed at fresh craters. Of the >200 craters that we identified within the landing ellipse, ∼60 craters appear to be relatively geomorphologically fresh. We identify craters as geomorphologically fresh on the basis of (1) sharp crater rim crests and/or (2) bright material surrounding the crater, suggestive of ejected material that was emplaced relatively recently (Fig. 7). From imagery that is collected with the rover cameras at fresh craters, we will then make specific measurements to constrain characteristics of lava emplacement through time. Specific measurements include analyzing grain size, vesicularity, and flow thickness, which are all important to help constrain magma viscosity and gas content. These measurements will help us to understand the role of volatiles, the depth of magma generation, the viscosity of magmas, and how these characteristics have changed through time.
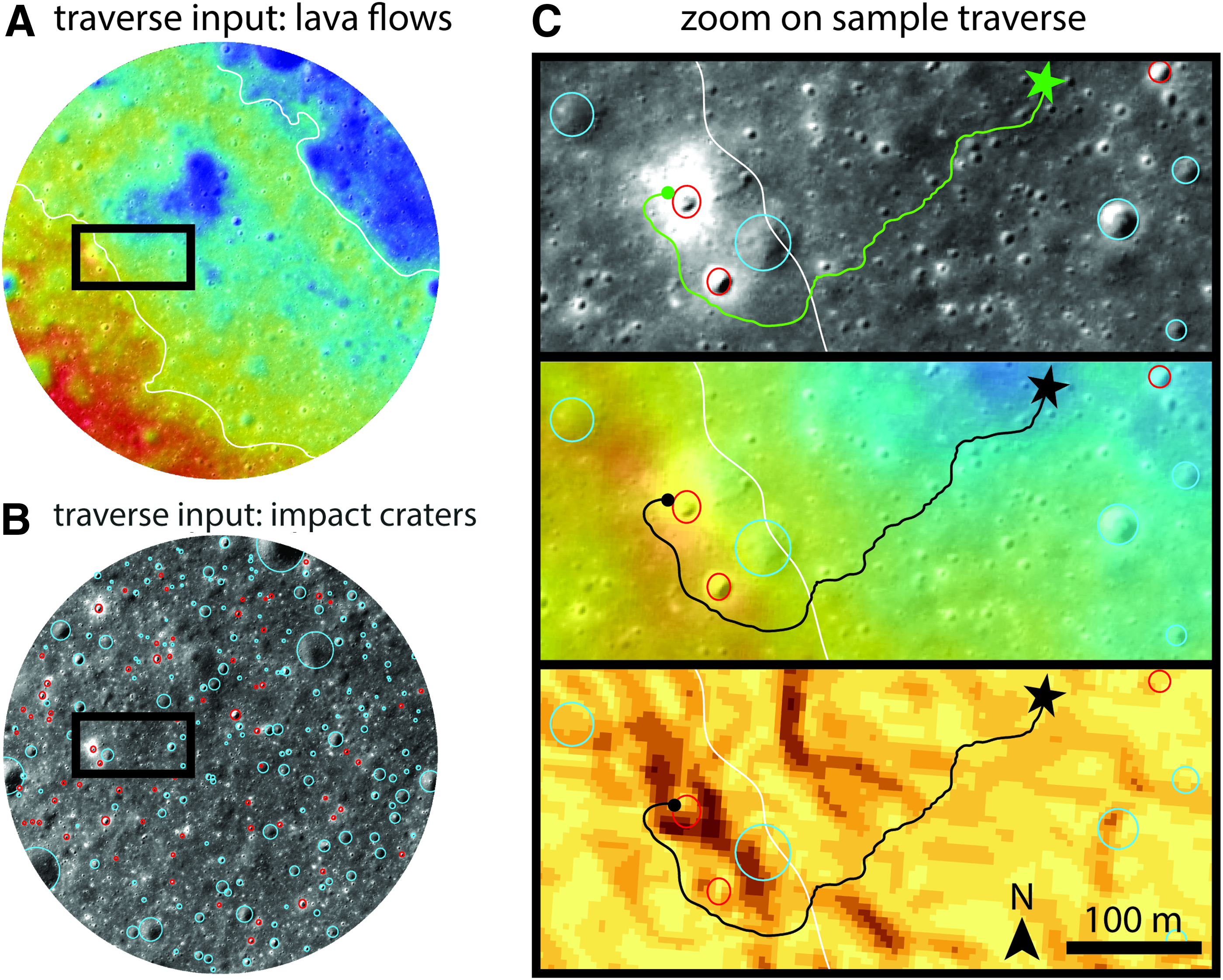
Illustration of potential traverse algorithm output. Primary target classes for scientific observations include impact craters, crater ejecta, regolith, and volcanic flows. Example of landing location is shown as star and traverse path is shown as lines.
Crater ejecta is another target class included in our list of science parameters for traverse planning. We propose imaging observations of crater ejecta to compare the contacts between freshly exposed material and nearby space-weathered regolith material. These imaging observations will be most easily made at the locations of fresh craters because fresh craters are a unique location where materials have been recently exposed to the space environment. By analyzing rover-acquired images of the distinct contact between exposed ejecta and more mature regolith, the proposed comparison with nearby space-weathered materials can easily be done to better understand the magnitude of space-weathering effects on lunar regolith as a function of time.
Conveniently, regolith material, which is the third target class included in our list of science parameters for traverse planning, comprises the majority of the surface in the landing ellipse. We propose to use the front-facing mast cameras to image the local regolith in front of the rover, and the rear-facing fish-eye camera to image disturbed regolith along the rover wheel tracks. Change detection analyses of these images will be used to (1) characterize the grain size and cohesion of the local regolith and (2) further characterize variations between fresh and space-weathered material, because the rover wheels may expose less mature materials to the surface.
Lava flow fronts are the final target class included in our list of science parameters for traverse planning. We propose to traverse across lava flow fronts, imaging the surface at a near-continuous frequency to collect high-resolution imagery of multiple lava flows (Fig. 7). As the rover traverses across flow fronts, we can observe the contacts between the fronts, permitting us to make observations of the lava flow morphology and boundary stratigraphy. The ability to traverse over these boundaries will allow for much higher resolution images of the individual flows than observations of the individual flows exposed at crater walls. However, individual craters have the potential to expose more than 1 contact boundary, providing more insight into the time-resolved sequence of the ascent and eruption of magma in the local region. Thus, images of the stratigraphy both at lava flow fronts and crater walls are critical to our analysis. Although only 2 flows are identified within the landing ellipse based on orbital topographic and imaging data sets (Figs. 3 and 7), the ECA rover is likely to traverse across additional flow fronts that have not been identified here due to the limited number of high-resolution, low-illumination orbital images acquired by the LROC NAC. Within this extensively volcanically resurfaced area, we encourage the rover team to image the lava flows to measure petrographic properties, including vesicularity and grain size, to infer the role of volatiles and the depth of magma generation.
To maximize the scientific return of the mission through the completion of as many of these outlined observations as possible (Table 3), we will use these target classes as inputs for the rover traverse algorithm, which currently only takes into account engineering constraints such as driving direction and the presence of hazards. The development of this algorithm is underway in collaboration with engineers at OrbitBeyond, and an example of a possible algorithm-generated traverse is shown in Figure 7. The algorithm will take inputs from the rover in real time during the mission, allowing for live adjustments to the rover traverse that enables updates to the exploration strategy based on information previously unknown from the resolution of orbital data sets.
Conclusions
A new era of commercial and private lunar exploration has stemmed largely from the Google Lunar XPRIZE competition. Private investment and partnerships are beginning to provide many exciting opportunities to explore the Moon. One of these opportunities is OrbitBeyond's Z-01 mission to Mare Imbrium. In 2020, OrbitBeyond will launch the Z-01 lander, which will carry the 7.5 kg ECA rover to the Mare Imbrium region of the Moon for a mission lasting 10 Earth days. Although the mission was originally designed to fulfill the Lunar XPRIZE requirements and did not have specific scientific goals, the Mare Imbrium landing site possesses a rich and diverse volcanic history. This mission offers the opportunity for scientific observations that can greatly improve our understanding of the thermal evolution of the Moon through time. As OrbitBeyond, Inc., along with other private-based aerospace companies, prepares to send robotic explorers to the surface of the Moon, it is important to assess how this increased access to the lunar surface can optimize scientific investigations. As space exploration evolves in this decade via increased participation by private industry, the collaboration between OrbitBeyond and Brown University represents a scalable model for future collaboration between researchers and private space companies to maximize the scientific return of private industry-funded spacecraft.
We have described a scientific DRM for the exploration of Mare Imbrium by the OrbitBeyond Z-01 lander and ECA rover, developed collaboratively between scientists at Brown University and engineers at OrbitBeyond. Our team has defined 2 key scientific goals for the mission: (1) improve the understanding of the generation, ascent, and eruption of magma on the Moon and (2) improve the understanding of regional geologic variations. To address these key scientific goals, we have outlined specific scientific observations and measurements that can be obtained with the instrumentation on the lander and rover. Many scientific objectives can be accomplished with the current, nominal payloads of the rover and lander (Case 1), and even more comprehensive objectives can be accomplished with the addition of an instrument on the rover that can measure the bulk chemistry of the surface, such as an APXS or XRFS (Case 2). This mission, originally designed as an engineering demonstration, will now provide important scientific data and results that will greatly improve our understanding of the regional volcanic history, and more broadly of the evolution of the Moon. The science and engineering synergism between Brown University faculty and students and OrbitBeyond provides a unique collaborative framework for future commercial scientific space exploration.
Footnotes
Acknowledgments
The authors thank one anonymous reviewer for the helpful feedback on this article, and Dr. Ken Davidian for the editorial handling of this work. The authors at Brown University also thank OrbitBeyond, Inc. for its collaboration on this Design Reference Mission, for fruitful discussions, and for continued guidance and feedback. This project stemmed from the course “Origin and Evolution of the Moon” that was offered at Brown University in Fall 2018 and is cosponsored by the Solar System Exploration Research Virtual Institute (SSERVI, at LPI) and SSERVI Evolution and Environment of Exploration Destinations (SEEED, at Brown University and MIT). The authors also acknowledge this course for the opportunity to get involved in commercial space exploration. The course materials, including readings and all recorded lectures for the course, can be found archived online at ![]() . The authors also thank NASA's Associate Administrator for the Science Mission Directorate, Dr. Thomas Zurbuchen, and NASA HQ program scientist, Dr. Sarah Noble, for their invaluable feedback.
. The authors also thank NASA's Associate Administrator for the Science Mission Directorate, Dr. Thomas Zurbuchen, and NASA HQ program scientist, Dr. Sarah Noble, for their invaluable feedback.
Author Disclosure Statement
No competing financial interests exist.