
Abstract
Introduction:
This article describes an enhanced telepresence robot named ROBIN, part of a telecare system derived from the GIRAFFPLUS project for supporting and monitoring older adults at home. ROBIN is integrated in a sensor-rich environment that aims to continuously monitor physical and psychological wellbeing of older persons living alone. The caregivers (formal/informal) can communicate through it with their assisted persons. Long-term trials in real houses highlighted several user requirements that inspired improvements on the robotic platform. The enhanced telepresence robot was assessed by users to test its suitability to support social interaction and provide motivational feedback on health-related aspects.
Methods:
Twenty-five users (n = 25) assessed the new multimodal interaction capabilities and new communication services. A psychophysiological approach was adopted to investigate aspects like engagement, usability, and affective impact, as well as the possible role of individual differences on the quality of human-robot interaction.
Results:
ROBIN was overall judged usable, the interaction with/through it resulted pleasant and the required workload was limited, thus supporting the idea of using it as a central component for remote assistance and social participation. Open-minded users tended to have a more positive interaction with it.
Conclusions:
This work describes an enabling technology for remote assistance and social communication. It highlights the importance of being compliant with users' needs to develop solutions easy to use and able to foster their social connections. The role of personality appeared to be relevant for the interaction, underscoring a clear role of the service personalization.
Introduction
The value of technology for home care for frail older adults and care providers is supported by different studies that also outline improvements on outcomes with chronic diseases, 1 even when considering different patient populations. 2 These studies suggested how telehealth may be useful for conditions that require close monitoring, clinical assessment, and early intervention, minimizing hospitalization or emergency visits. Ludwig et al. 3 identified six archetypical service categories that could be pursued by health-enabling technologies: handling adverse conditions, assessing state of health, consultation and education, motivation and feedback, service ordering, and social inclusion. Despite the fact that maintaining social relationships is widely recognized as an important factor of well-being in old age, 4 –7 social inclusion is still an under-investigated topic. 3
Different projects have started to extend the classical healthcare scenario by designing applications that explicitly aim at increasing well-being and social inclusion for older adults. 8
Most of these efforts share the idea of having (1) “disappearing technology,” that is a set of sensors monitoring health and behaviors of the older users; (2) a “central component” (often a robotic platform) acting as the mediator between the “hidden technology” and the user; or (3) alternatively enabling the communication between the older user's world and the external world.
Telepresence robots represent a promising emerging technology that could serve the social participation of older adults. 9 –11
This work describes ROBIN, a telepresence robot enhanced to better reflect the older user needs and foster social inclusion. This robot is integrated in a telecare system named GIRAFFPLUS 12 aiming at both monitoring health status and improving social connections of older people. Starting from experimentation in real houses, a set of requirements emerged that suggested the enhancement of the platform to support social interaction and provide motivational feedback on health-related aspects.
ROBIN has been assessed through a psychophysiological evaluation aimed at investigating usability, mental workload, engagement, and overall user satisfaction as key indicators of the suitability of an emerging technology for a group of frail people. The study also explored the influence of individual differences on the effectiveness of interaction with the technology.
Methods
The GIRAFFPLUS Telecare System
The GIRAFFPLUS project built and evaluated a telecare system able to collect elderly's daily behavior and physiological measures from distributed sensors in living environments, as well as to organize the gathered information so as to provide customizable visualization and monitoring services for both primary (older user at home) and secondary users (family members or healthcare professional assisting the older person). The system (Fig. 1) integrates a smart sensor environment, several user-oriented software services (e.g., one for data analytics and one for user personalization), and a state of the art telepresence robot, called GIRAFF, which ensures the communication (mostly social contact) among the primary users and the secondary users. Data are continuously gathered in the house both from the environmental and the physiological sensors; potential alarms are continuously monitored and, when occurring, communicated to secondary users. To visualize data/information to users, a Data Visualization, Personalization, and Interaction Service (DVPIS) has been realized and integrated to manage interaction with the different actors. Two different instances of the DVPIS were built: one for “outside the home” (DVPIS@Office)—for example, for secondary users, and another dedicated to the primary user (DVPIS@Home). The services pursued with the DVPIS service are twofold: primary users can access the information on their own health condition, enabling them to better manage their health and lifestyle (i.e., ROBIN verbalizes the taken measurement and/or shows it on its screen also in the form of a graph to show the history); secondary users (both physician and family members) are supported by a flexible and efficient tool, while taking care of older people (relatives/patients) and monitoring their health parameters.
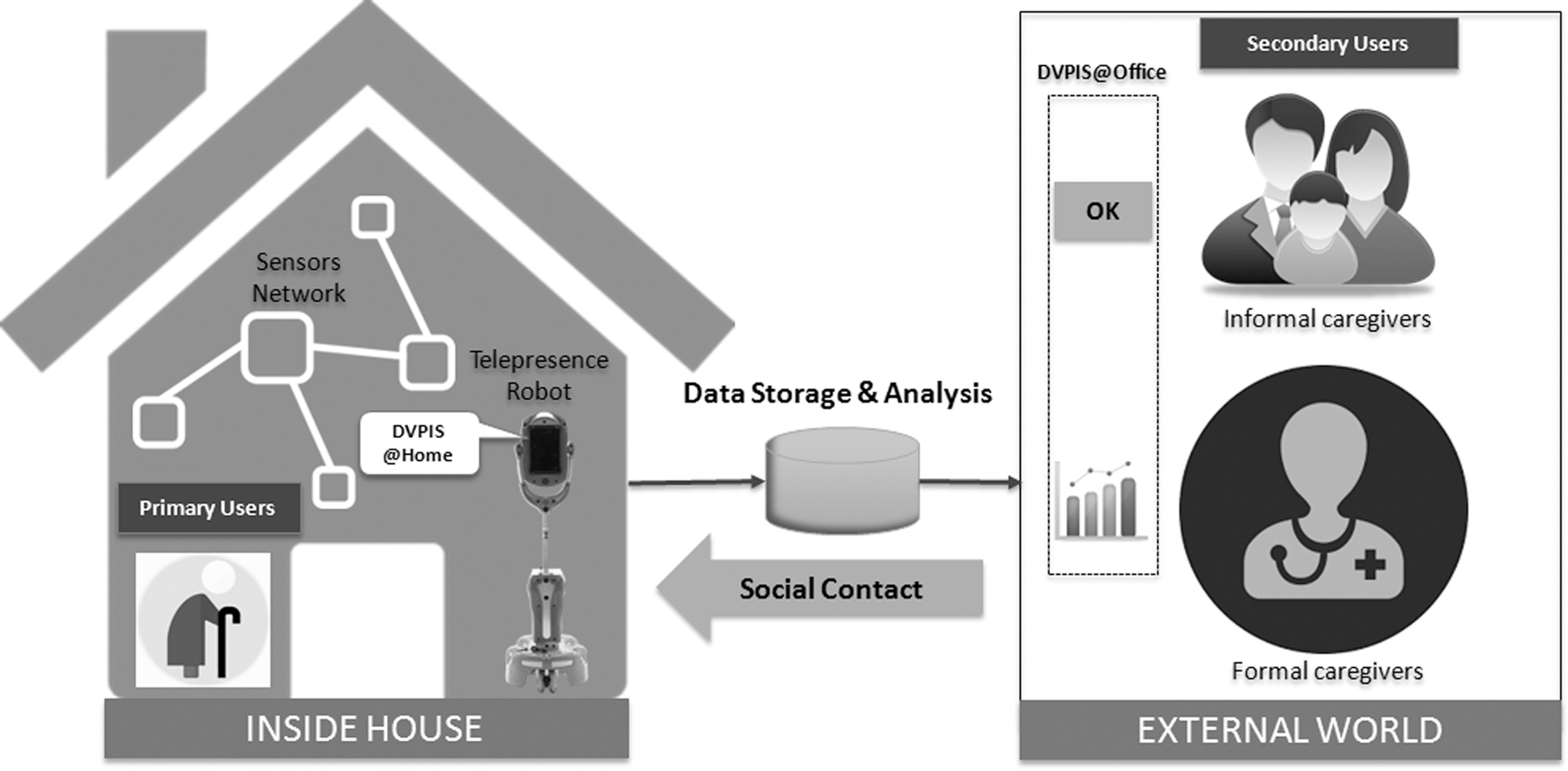
Sketch idea of the GIRAFFPLUS system.
User Needs from Fielded Deployment
A long-term experimentation of the GIRAFFPLUS technology into real houses emphasized concrete needs from users summarized in the following families of requirements: • Communication was perceived as too limited—the video call ensured by the robot was positively judged, but the users were expecting additional communication modalities like the possibility to send or receive video/audio messages in an asynchronous way. • The robot's services were judged as limited—users required additional services like the possibility to share material with remote users during visits (e.g., sharing of health-related information/advices) and asynchronously through a proactive initiative of the robot (e.g., proactive reminders and health-related suggestions). • The users want to be in control—the users felt to be too passive and not in control of the robotic platform.
Technological Improvements of the Robotic Platform
Considering the above findings, the telepresence robot was enhanced by developing two new features: (1) Enhanced Communication services and (2) Multimodal Interaction modalities.
Enhanced communication services
These services aim at enriching the basic communication capabilities of the GIRAFF robot providing the primary user with the following functionalities: • Standard video call (Avatar): the GIRAFF application has been embedded within the ROBIN platform maintaining the possibility for secondary users to visit the older user's apartment by telepresence (Fig. 2). • Messages/reminders: the robot software has been enriched with the possibility for primary users to receive (textual and spoken) messages from secondary users or reminders/suggestions (e.g., Fig. 3). This functionality can be also used to provide health-related suggestions to users. Considering environmental and physiological sensor readings, ROBIN can automatically synthesize reminders as well as Health and Wellness suggestions for improving lifestyle. Suggestions can be of different nature ranging from context independent, such as “tips of the day,” valid for everyone, to context-dependent messages, such as recommendation-based health status. • Shared space: the communication system has been endowed with a panel called the “shared space” to show personal data (e.g., physiological measures*) to the primary user, and to allow primary and secondary users discussing the health status and habits of the older person. In fact, on one hand, the taken measurements are shown on the ROBIN's screen to be inspected by the older user at home. In addition, the DVPIS@Office application, downloadable on any personal computer (PC), allows secondary users to consult the list of physiological measurements also in the form of a graph. Also, the same measures can be discussed during a telepresence call between the older users at home (who looks at the robot screen to see them, while talking with his/her remotely connected caregiver) and the secondary users (who have the graph with the measurement available on their PC), while talking to the older users through the telepresence robot. ROBIN includes now an environment that allows such a dialog (Fig. 4). The aim of this service is to improve the awareness of the primary user and thus to encourage responsible behaviors for increasing his/her well-being.

The standard videocall service. Photo used by permission.
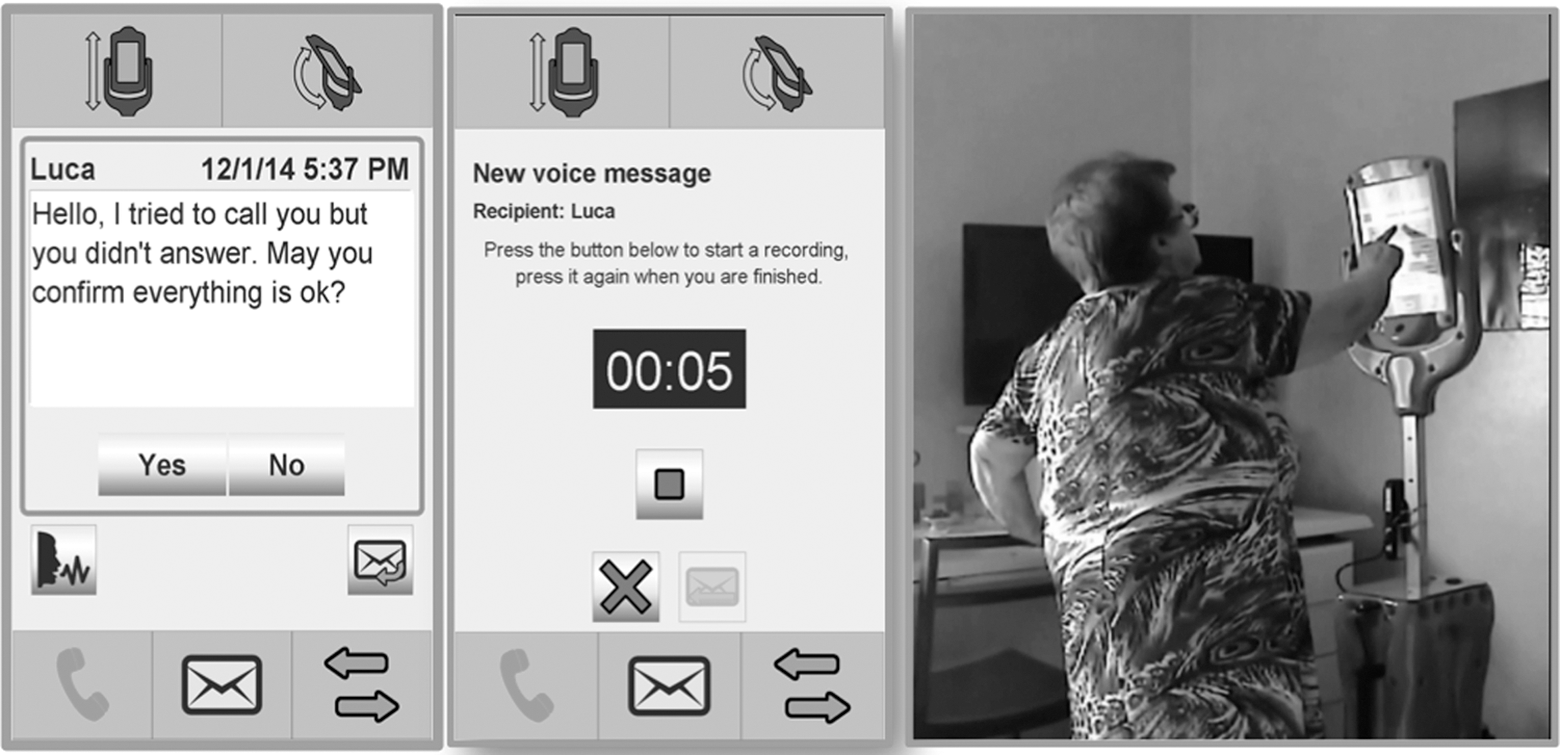
The messages/reminder service.

The shared space service. Photo used by permission.
Multimodal communication module
A further service has been developed to allow primary users directly controlling the movements of the robot performing specific gestures and vocal commands. A Kinect sensor has been installed on the robot, that is, a device with an RGB camera, depth sensor, and multiarray microphone coupled with a software framework for interpreting specific gestures, tracking the movement of individuals in three-dimensional space, as well as performing natural language processing.
Specifically, the Kinect was used to implement the following: 1. Gesture recognition, a real-time video analysis process tracks user's gesture and body position detecting a set of specific “human body configurations” to trigger robot movement requests; 2. Voice commands recognition, a real-time audio analysis process captures verbal commands issued by a human user, also performing noise reduction.
The Gesture and Voice Commands Recognition software framework was designed and implemented exploiting the Software Development Kit and Speech Recognition API both provided by Microsoft for the Kinect and then, integrated with the mobility control software of ROBIN (Fig. 5). Specific software processes were developed to detect and classify image, depth, and audio data simultaneously. Mobility control software is responsible for implementing the actual movements of ROBIN based on the recognized gestures and verbal commands. The open message protocol for machine to machine communications called message queuing telemetry transport (MQTT) has been exploited to connect the detection software and the mobility control software allowing to share data across the Kinect and the robot following a publish/subscribe mechanism.
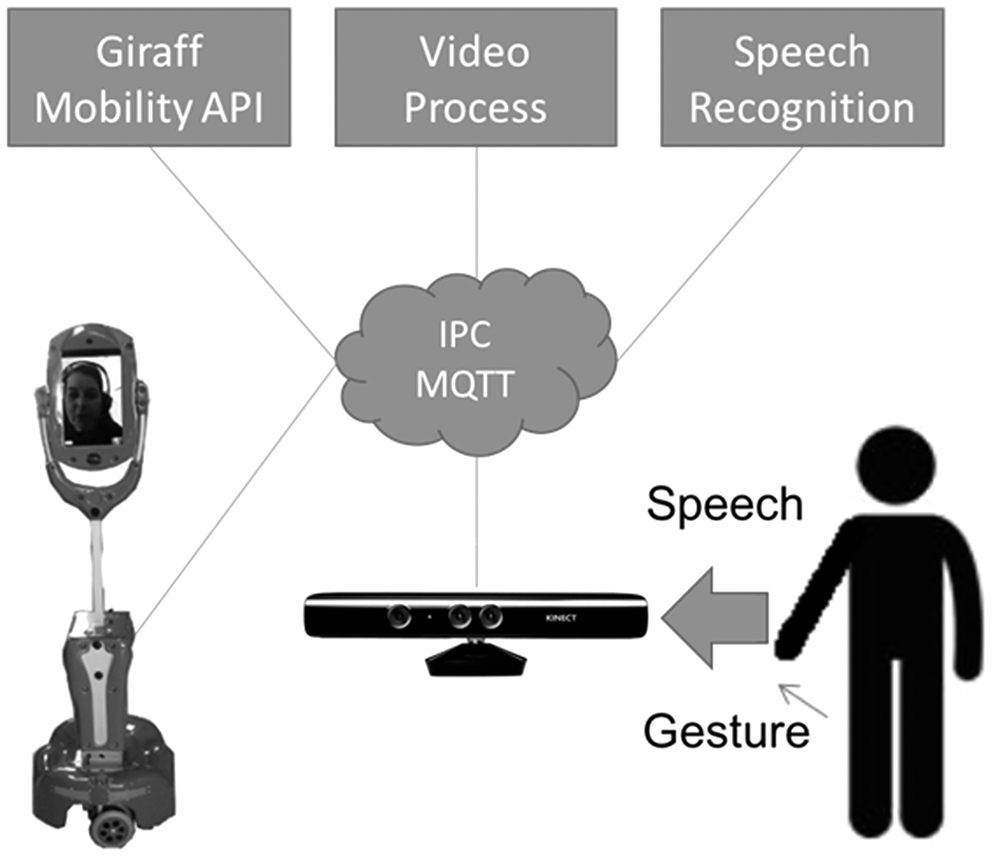
Multimodal communication system structure.
The mobility control system implements some basic movements (Fig. 6): go forward; go backward; turn left; and turn right; rotate on itself (180°). The robot can also automatically undock from a charging station; adjust its orientation toward the speaker position; move closer to the user; and follow the user. The robot is able to turn the screen up and down and to suspend/restart the commands detection (“system locked” and “system unlocked”). A specific “emergency stop” command has been also included to stop the platform in any moment.
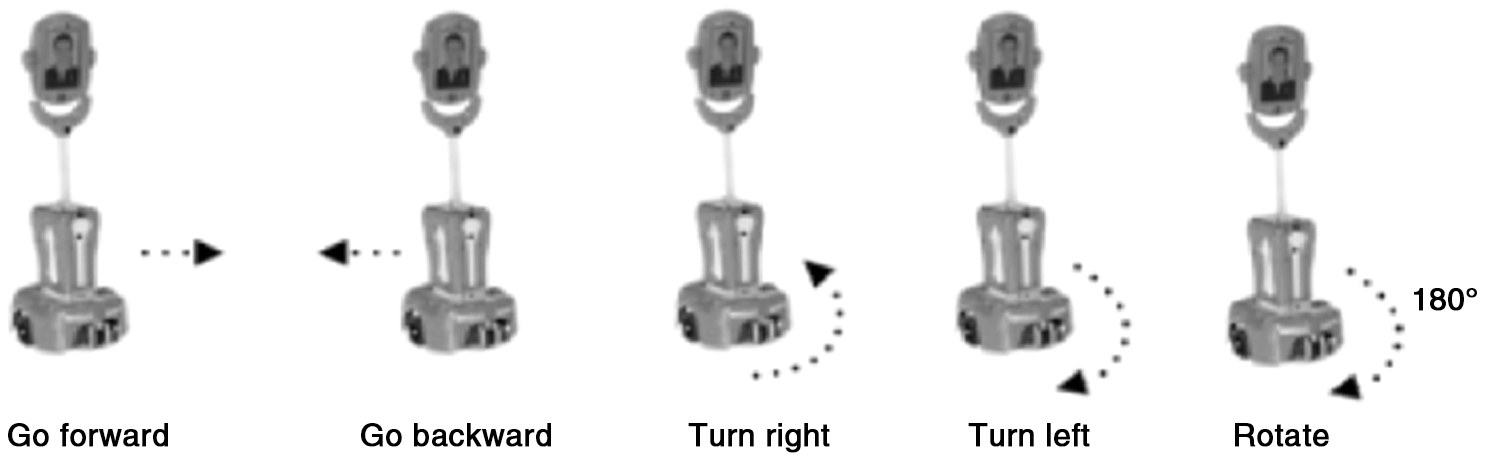
Basic movements of the ROBIN robot.
It is worth underscoring that some of the actions cited above (Fig. 7) have been specifically implemented on a distance-based control loop algorithm designed ad hoc for the Multimodal Communication Module extending the already existing GIRAFF functionalities.
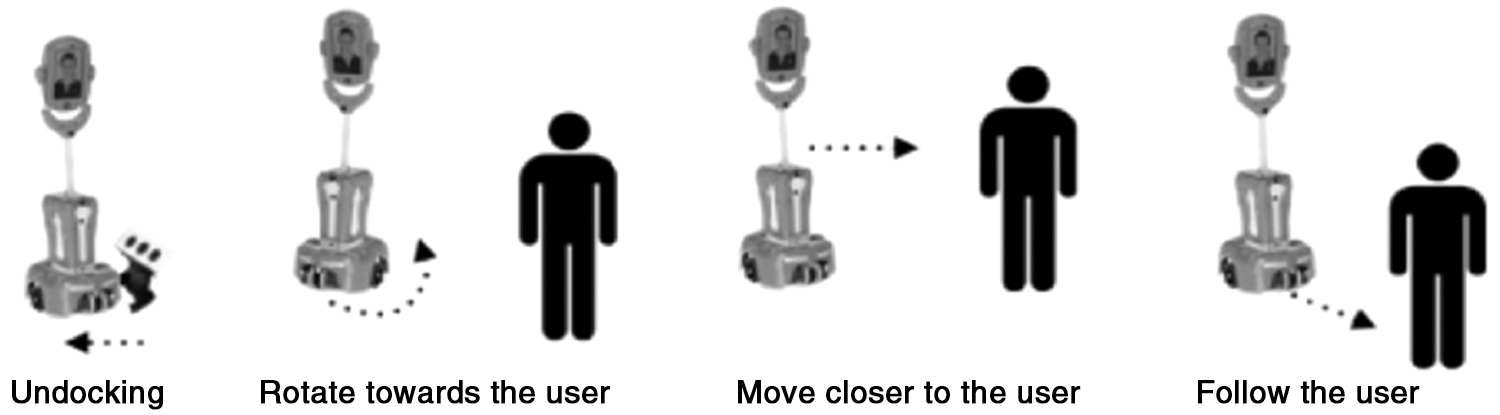
New actions implemented to extend telepresence robot mobility functionalities.
Finally, a visual and audio feedback was implemented to make the user aware of the recognized commands.
User Evaluation and Human-Robot Interaction Experiments
End users of robots for personal assistance are usually not skilled robotics experts, neither are they familiar with new technologies. 13,14 For this reason, it becomes crucial to provide solutions that are easy to use and well accepted, and the assessment of these factors is crucial. Incorporating social signals and cues in the control of movement is also important. 15 Dyadic interaction scenarios are often used to study turn-taking in human-robot interaction, as they allow studying how the interaction is influenced by variables such as individual factors. 16 Finally, in order to evaluate the quality of the interaction, Anzalone and colleagues 17 , propose to assess the engagement.
In our work, ROBIN was subjected to an evaluation based on a combination of psychophysiological measures. 18 The following dimensions were considered: cognitive workload, affective response to technology, perceived usefulness, and emotional reaction.
With respect to what we previously reported in another paper 18 , the work was reinforced in two directions: the sample size has been enlarged to more robustly investigate the above-mentioned aspects; an additional exploration has been pursued to assess the influence of individual characteristics, such as personality, on the users' perception of interaction. The impact of the robot's usage has been assessed by analyzing the cardiac responses to the interaction and relating the physiological activity of the autonomous nervous system to the self-ratings.
Participants
Twenty-five participants (12 females and 13 males) were involved (mean age 37.4 ± 14.9). Inclusion criteria were the following: absence of any lifetime history of cardiac complications or any major disease, nor treatment with any medication that could affect the autonomic nervous system activity. The subjects were also asked to refrain from smoking or drinking coffee and alcohol for at least 1 h before the electrocardiography recording.
Materials and Instruments
The questionnaires and instruments explained in Table 1 have been used to gather feedback on their experience with the robot and its services.
Questionnaires and Instruments
BFQ-2, Big Five Questionnaire 2; CSUQ, Computer System Usability Questionnaire; ECG, electrocardiography; NA, negative affect; NASA-TLX, NASA Task Load Index; PA, positive affect; PANAS, Positive and Negative Affect Schedule; SUS, System Usability Scale.
Experimental Procedure
At their arrival to the laboratory, participants were asked to sign a consent form and were informed about the tasks. The experimental procedure* envisaged two main sessions. A first training session devoted to make participants familiar with the Multimodal interaction (voice and gesture), and a second session, which represented the actual experimental session where participants were asked to perform a set of tasks reproducing a scenario that entailed both the use of the Multimodal Interaction Module and the Communication services. During the whole session, users were invited to wear a cardiac Holter to record their cardiac activity during the interaction with ROBIN.
The analyses were done on the cardiac activity** during the actual experiment session. The following conditions have been considered for statistical analysis: the baseline (hereafter Baseline condition) was analyzed to obtain the individual basal values of autonomic system, and two experimental conditions: the interaction with the Communication services of ROBIN (Communication condition) and the interaction with ROBIN through gestures and speech (Multimodality condition).
Statistical Analyses
Statistical analyses have been performed with SAS 9.4. Preliminary descriptive analysis was carried out on self-report measures to get an overview of user's perception of ROBIN (usability and impact on emotional and cognitive status). Subsequently, ratings of Positive and Negative Affect Schedule (PANAS), Computer System Usability Questionnaire (CSUQ), and NASA Task Load Index were analyzed through Pearson's correlations to investigate possible associations. Usability scores obtained for the interaction modalities with the robot (System Usability Scale [SUS] gesture and SUS speech) were compared through t test statistics to find out possible differences between gesture and speech interaction, and pre- versus post-usage of such commands within a complex scenario (SUS after the Training session vs. SUS after the Experimental session). Differences in physiological activation among conditions were investigated through analyses of variance (ANOVAs) by comparing analysis of variance between physiological data in baseline Multimodal and Communication conditions.
To investigate possible relationships between self-report and physiological measures and between personality and autonomic activity, correlation analyses were performed.
Results and Materials
Psychological Self-Report Measures
The participants' attitude toward ROBIN was assessed through their ratings to the questionnaires. The overall usability perception was good (mean 5.93 ± 0.59). The robot was considered useful (system usefulness [SYSUSE]: mean 5.90 ± 0.62), the information provided to accomplish the tasks was good (information quality [INFOQUAL]: mean 5.84 ± 0.80), and the interface was judged appropriate (interface quality: mean 6.19 ± 0.69).
The Communication services were rated positively, and all services were assessed as valuable (Messages exchange: mean 4.40 ± 0.42; Videocall: mean 4.62 ± 0.37; and Multimedia exchange: mean 4.53 ± 0.53). The Positive Affect of PANAS and some usability dimensions showed significant positive associations (CSUQ: r = 0.57, p = 0.00; SYSUSE: r = 0.58, p = 0.00; INFOQUAL: r = 0.48, p = 0.01), suggesting a relationship between perceived usability and positive mood elicited by the interaction with ROBIN.
Moreover, users reported to have felt mostly positive emotions during their participation and, with regard to the multimodal interaction usability, no significant differences emerged between gesture and speech; neither the merged usage of both modalities affected the positive judgments of users (Table 2).
Mean Score and Standard Deviation of Positive and Negative Affect Schedule, NASA Task Load Index, and System Usability Scale
SD, standard deviation.
With regard to possible associations between personality traits and experience evaluation, a negative correlation emerged between the Negative Affect of PANAS and the Openness dimension of BFQ (r = −0.40; p = 0.04).
Results on Physiological Correlates
When performing ANOVAs to assess differences between conditions unveiled significant results with regard to absolute values of low frequency (LF) (F(2,48) = 5.82, p = 0.00). Subsequent t test analysis showed significant differences between the Baseline and the Communication condition (t(24) = −2.16, p = 0.04) in the direction of higher LF power in the Communication condition. The LF power in the Communication condition emerged to be significantly higher with respect to the Multimodal condition as well (t(24) = −3.29, p = 0.00). The difference among conditions in Total Power resulted significant as well (F(2,48) = 5.04, p = 0.01). Specifically, the sympathetic activity in the Communication condition was stronger than both in the Multimodality condition (t(24) = −2.08, p = 0.04) and the Baseline condition (t(24) = −3.28, p = 0.00). An overview of activation pattern can be seen in Figure 8.
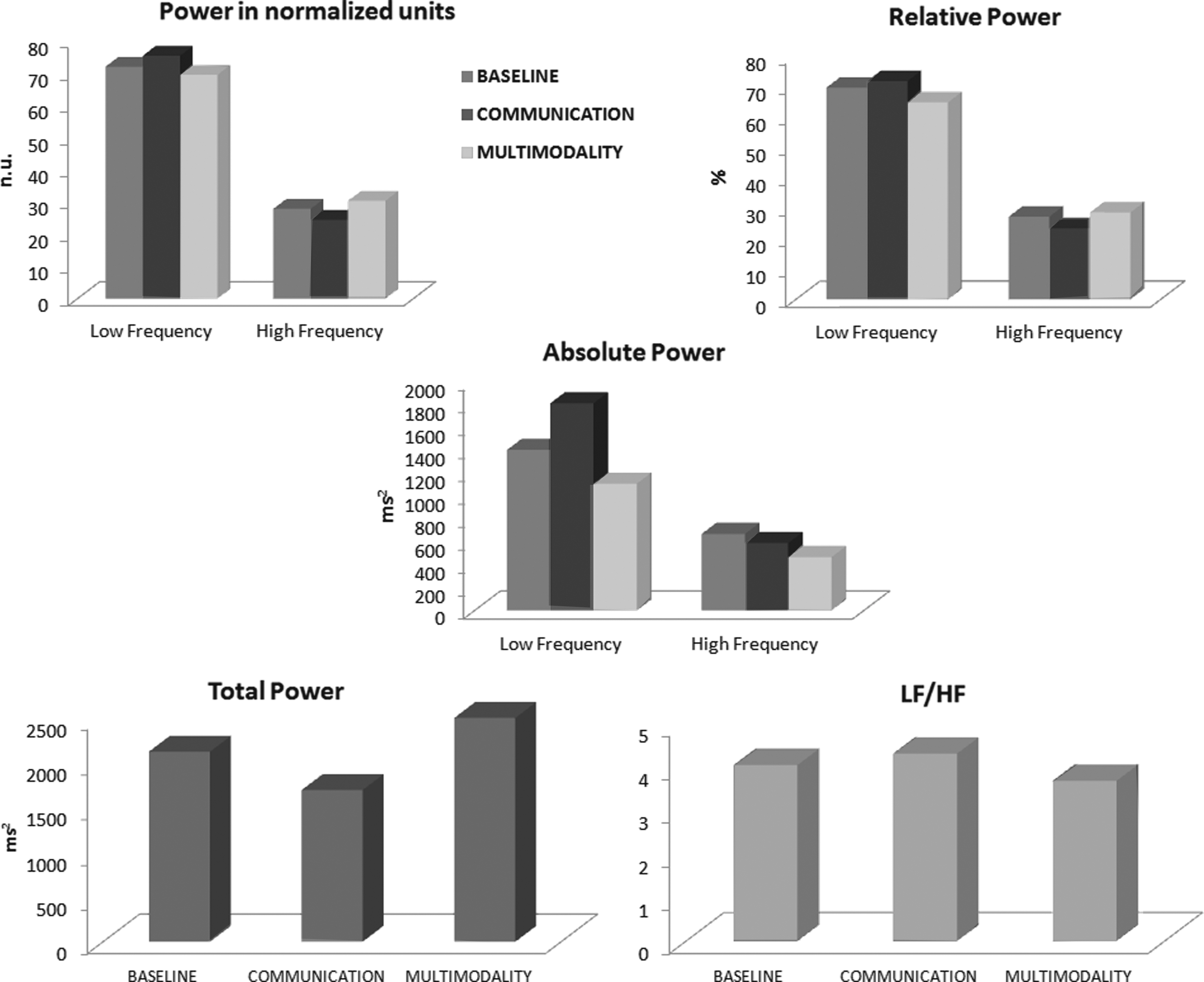
Results from physiological correlates: frequency-domain analysis. HF, high frequency; LF, low frequency; ms2, milliseconds squared; n.u., normalized units.
Psychophysiological Correlates of Personality
Differences in the autonomic activation pattern during the experimental experience were investigated by performing some correlation analysis with self-report measures. They unveiled a correlation between the Positive Affect and sympathetic activation in the Multimodality condition, as supported by the negative significant association with normalized data of LF (r = −0.40, p = 0.04).
Moreover, it emerged a relationship between the Openness dimension of personality and the autonomic activation. Tables 3 and 4 show that a positive association between high frequency and Openness emerged both during the Multimodality condition and the Communication condition, while an inverse pattern emerged with respect to the LF. Moreover, it emerged for absolute power, relative power, and normalized units as well. The significant correlation seems to be mainly due to the association with the subscale Openness to Experience, which is significantly associated with physiological activation.
Correlation Analysis on Physiological Correlates of Autonomic Activation in the Communication Condition and Openness
Only significant results are reported.
HF, high frequency; LF, low frequency; n.u., normalized units.
Correlation Analysis on Physiological Correlates of Autonomic Activation in the Multimodality Condition and Openness
Only significant results are reported
HF, high frequency; LF, low frequency; n.u., normalized units.
Discussion
The overall attitude of users toward ROBIN usage has been positive, suggesting a good level of engagement during the interaction. Self-report results indicate that users perceived in a positive way both the interaction with ROBIN and its services. The positive impact elicited by the robot on users has been evinced by the overall positive mood during the interaction, which turned out to be barely workload demanding. Indeed, the participants did not report any stressful, annoying, or frustrating perception (low values for negative affect rating).
Moreover, the robotic platform has been considered usable in terms of interaction modalities, usefulness, and appropriateness of the interface. Our findings suggest how the usability perception was not affected by an increment of task load due to a more complex scenario and additional tasks to accomplish. These results could be explained by considering that users did not experience high degree of workload when participating in the experimental session, and they reported to have felt mostly positive emotions during their participation.
Interestingly, it emerged how the individual aptitude to be open to new experiences among different areas and to be curious to novelty is associated to a lower probability to perceive the interaction with such an unusual partner as negative. Openness to Experience is supposed to be strongly intrapsychic and it is linked to individual intelligence in terms of scientific, esthetic curiosity, and creativity. 24,25 A person with high degree of Openness to Experience tends to be original, attracted to new experiences from different sectors. 26 DeYoung et al. 27 describe it by referring to flexibility and cognitive exploration, and through the words of McCrae, “it includes the receptivity to a wide variety of experiences and a fluid permeable structure of awareness.” 28
These speculations are extremely interesting when considering that participants were supposed to interact with an unusual partner and that they had to learn pretty specific communication modality. People with higher degree of Openness seem to maintain higher degree of relaxation during the interaction, possibly due to the fact that they are less affected by this sort of “novelty effect.” Moreover, by relying on the negative association between self-report measure of Negative affect and Openness, we could speculate that open-minded people are more inclined to appreciate the robotic platform, the way they can interact with it, and the provided services.
By taking together these results, we can hypothesize that this personality trait plays a key role in accepting a robotic platform as counterpart in a dyadic interaction. This is crucial for the personalization issue. When designing social assistive robots, it is fundamental to develop a system able to tailor its behavior according to the specific user so as to promote positive feelings toward the robot, acceptability, compliance, and trust, and to foster the engagement during the interaction. Possibly, people with low degree of Mental Openness could need more time to familiarize with the robotic counterpart. Alternatively, they could benefit from tailored services or tailored interaction modalities to accept it.
These results pave the way to further investigations to deepen which are the peculiar requirements for users according to stable characteristics such as personality.
Conclusions
This article describes an enhanced telepresence robot named ROBIN, part of a telecare system for supporting and monitoring older adults at home and to foster their social participation. Guided by indications from fielded experiments, the enabling technology was improved to provide multimodal interaction and ensure additional health-related services delivered both during a virtual visit of a caregiver (e.g., sharing of health-related information/advices) and asynchronously by a proactive initiative of the robot itself (e. g., reminders and health-related suggestions).
Results of a psycho-physiological assessment show that users positively evaluate ROBIN in terms of usability, workload, and emotional impact, thus supporting the idea of using it as a central enabling technology of telecare systems. In addition, individual differences (i.e., personality traits) represent an important variable to take into account to promote positive feelings toward the robot and foster acceptability, compliance, and trust from different users.
Footnotes
Acknowledgments
The authors' work has been initially motivated by the GIRAFFPLUS project (FP7 ICT GA.288173). They are currently supported by the AAL JP under the MAESTRO project (“Sustainable reference framework for evaluating quantified self equipment and services for seniors”—AAL-2014-146).
Disclosure Statement
No competing financial interests exist.