
Abstract
Product proliferation and changes in demand require that retailers regularly determine how items should be allocated to retail shelves. The existing shelf‐space literature mainly deals with regular retail shelves onto which customers only have a frontal perspective. This study provides a modeling and solution approach for two‐dimensional shelves, e.g., for meat, bread, fish, cheese, or clothes. These are categories that are kept on tilted shelves. Customers have a total perspective on these shelves and can observe units of one particular item horizontally and vertically instead of just seeing the foremost unit of an item, as is the case of regular shelves. We develop a decision model that optimizes the two‐dimensional shelf‐space assignment of items to a restricted, tilted shelf. We contribute to current literature by integrating the assortment decision and accounting for stochastic demand, space elasticity and substitution effects in the setting of such self types. To solve the model, we implement a specialized heuristic that is based on a genetic algorithm (GA). By comparing it to an exact approach and other benchmarks, we prove its efficiency and demonstrate that results are near‐optimal with an average solution quality of above 99% in terms of profit. Based on a numerical study with data from one of Germany’s largest retailers, we were able to show within the scope of a case study that our approach can lead to an increase in profits of up to 15%. We demonstrate with further simulated data that integration of stochastic demand, substitution, and space elasticity results in up to 80% higher profits.
Introduction
This study considers the problem of selecting, allocating and arranging products on retail shelves. Shelf space has been referred to as one of the retailer’s scarcest resources (cf. e.g., Brown and Tucker 1961, Geismar et al. 2015, Hübner et al. 2013a, Kök et al. 2015, Lim et al. 2004, Reiner et al. 2012). Up to 30% more products compete for the limited space than was the case ten years ago (EHI Retail Institute 2014, Hübner et al. 2016). The increasing number of items to allocate, the shortage of shelf space, narrow margins in retail and the intensity of competition have greatly magnified the importance of retail assortment and shelf‐space planning (cf. Hübner et al. 2013b). Furthermore, customer satisfaction is mostly driven by availability of the right products. In order to achieve superior performance, retailers have to recognize customers’ needs and identify these as key drivers (Eltze et al. 2013, Nielsen 2004).
The selection of items and space allocation of the items to the shelf are interdependent planning problems when shelf space is restricted. The space available per product is less if broader assortments are offered and vice versa. Consequently, planning retail shelves involves the tasks of specifying the product assortments as well determining the space and quantities for selected items. These decisions are not only based on the margins of the products but also on associated demand and customer preferences. The more shelf space is allocated to an item, the more it attracts customers and the higher its demand. This is referred to as “space‐elastic demand.” This topic has gained a lot of research attention over recent years (see e.g., Bianchi‐Aguiar et al. 2019, Hübner and Kuhn 2012, Kök et al. 2015). Common characteristics of these models are that demand depends on the number of facings (= the foremost unit of an item in the front row of the shelf), and that retail shelves are observed by customers from a frontal direction. This firstly implies that a customer can only see the facing, and secondly, that two different products can only be positioned next to but not behind one another. We refer to this shelf type as a “regular shelf” herein. For example, candies, coffee and tea, canned goods, cleaners, and personal care products are presented on regular shelves.
Not all retail categories are kept on regular shelves. Some products are presented on “tilted shelves” (like counters, fridges or tables) onto which customers have a total perspective. Examples of these shelf types are to be found in Figure 1. These two‐dimensional shelves types are, for example, used for the presentation of fresh food like bakery products and sausages, frozen products or in fashion retailing and consumer electronics. Many other retail formats fit into these settings, e.g., products and magazines in kiosks, snacks or electronics in vending machines and display ads (see also Geismar et al. 2015). With these shelves, items can be arranged more flexibly in the two‐dimensional space, whereas with regular shelves the options are restricted by the shelf levels and their height. For example, two different products can be positioned next to and behind one another on two‐dimensional shelves.
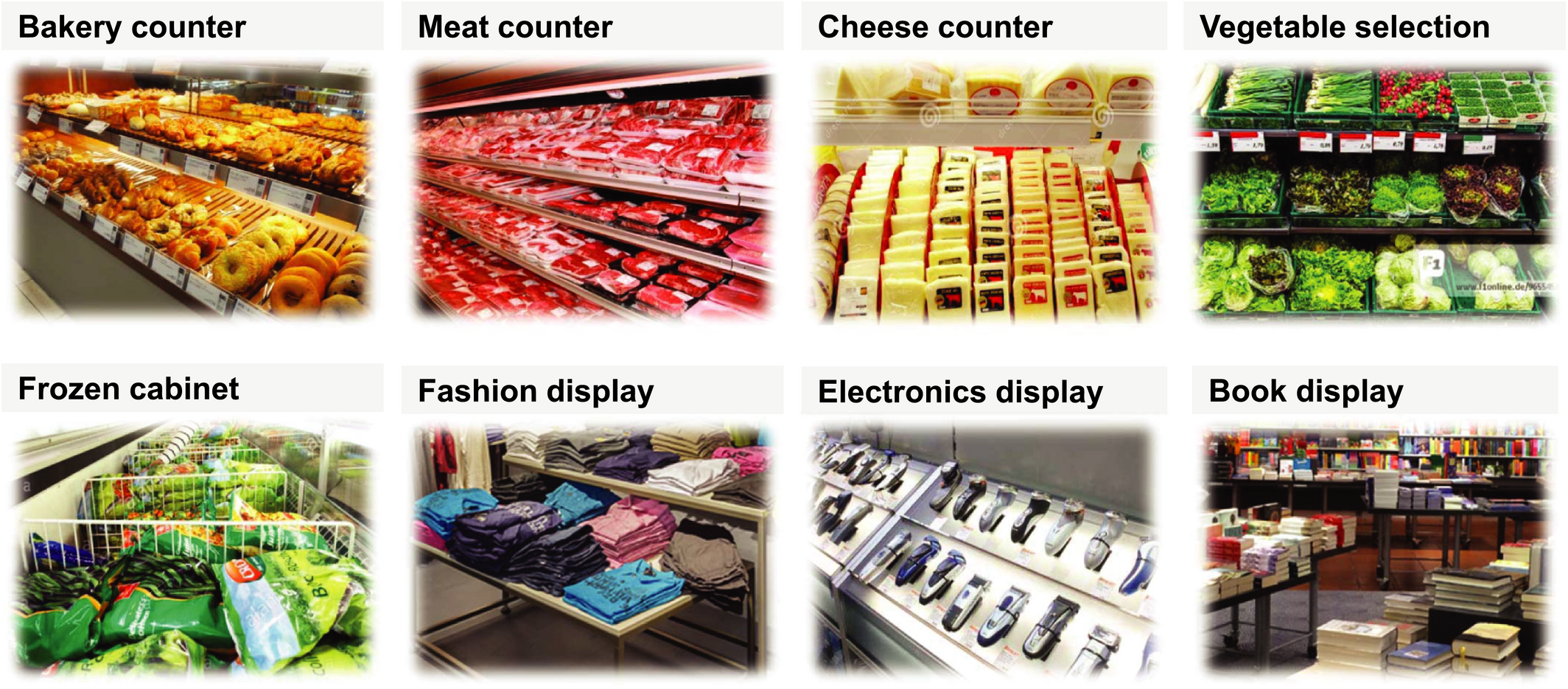
Examples of Categories Stored on Two‐Dimensional Shelves [Color figure can be viewed at
There is already a rich literature on the planning of regular shelves. Typically, these models determine the shelf quantity and the number of facings for each shelf level (e.g., third level of second shelf). The most commonly used approach is to model the total shelf space via a one‐dimensional shelf length (e.g., Bianchi‐Aguiar et al. 2016, Gilland and Heese 2013, Lim et al. 2004, Martínez‐de Albéniz and Roels 2011). The models treat each shelf level with a one‐dimensional front row space where only the front‐row facings need to be determined as retailers usually fill up the entire shelf depth with more units of the respective product. Düsterhöft et al. (2019) propose a model for regular shelves that consider one‐dimensional shelf levels of varying size in height, depth and width. As these models assume one‐dimensional shelf space and defined shelf levels, they cannot be applied to two‐dimensional applications where consumers have a different perspective. In one‐dimensional approaches, it is sufficient to determine the number of facings, whereas in two‐dimensional problems the rectangular arrangement of the facings also needs to be determined. Two‐dimensional problems require to compute horizontal and vertical number of facings (e.g., product A with 2×3 facings), the vertical and horizontal positioning of products within the two‐dimensional area (e.g., product A positioned at certain x and y coordinates) and adjacent requirements of items (e.g., products A and B next to each other and C behind). Furthermore, vertical and horizontal sizes of products and shelves must be considered. Two‐dimensional shelves face additional constraints, too, e.g., facings of a product need to be arranged in a contiguous rectangular shape, and not in other ways, such as L‐forms.
To summarize, there are two different shelf types which each have their respective modeling requirements: Regular shelves where items are allocated along an one‐dimensional shelf length. Two‐dimensional shelves where items are allocated to a two‐dimensional shelf space and items need to follow particular arrangement constraints.
One‐dimensional solutions obtained for regular shelves cannot easily be transferred to two‐dimensional selves as the arrangement of facings also needs to be integrated into decision‐making. Only Geismar et al. (2015) have modeled a related two‐dimensional shelf‐space problem. Their model can also be applied to develop two‐dimensional shelf plans. However, they assumed a given assortment, given and known demand and did not factor in substitutions for the assortment decision space‐elasticity for the space allocation. We extend this approach by accounting for assortment decisions, stochastic and space‐elastic demand as well as out‐of‐assortment and out‐of‐stock substitution. We ultimately extend the two‐dimensional problem that was introduced by Geismar et al. (2015) by using a more comprehensive demand function, a tailored solution procedure to the problem and numerical analysis to derive managerial insights. As such, the model of Geismar et al. (2015) represents a special variant of our demand model.
The remainder of this study is organized as follows: section 2 provides a detailed description of the setting and planning problem and related literature. Section 3 formulates the optimization model as a constrained multi‐item newsvendor problem with substitutions. We develop a specialized heuristic to solve the related problem. This is represented in section 4. Numerical results and a case study are presented in section 5, while section 6 concludes.
Setting, Planning Problem, and Related Literature
This section analyzes the scope (2.1), particularities of planning with two‐dimensional shelves (2.2) and identifies the impact of these decisions on customer demand (2.3). Together, these build the foundation for the literature review and open research questions (2.4).
Scope and Planning Approach
Shelf management comprises two hierarchical levels. One is a store (macro) level, deciding the space for product types (e.g., beverages, chocolate) and shelf types on a strategic level. The other is on product category (micro) level which allocates individual products within each category on a tactical level. Our problem is concerned with the micro level, and considers the tactical allocation of a category of products onto a set of defined shelves. The shelf space available for a category is limited and determined by preceding decisions regarding store layout planning (cf. Hübner et al. 2013a). The ultimate objective is to maximize retailers’ profit which depends on the customer demand realized. This in turn depends on the positioning and space allocated to the products on the shelf, the product margins and operational costs. The traditional micro space‐planning instrument of retailers is a planogram, representing an illustration of a shelf plan for a specific category. A planogram gives detailed information about the product’s vertical and horizontal shelf position as well as the product’s shelf quantity.
Particularities of Two‐Dimensional shelves
Distinctive requirements of two‐dimensional shelves need particular approaches. These are the (1) total customer perspective and two‐dimensional item arrangement and (2) rectangular facing arrangements.
(1) Total customer perspective and two‐dimensional item arrangement. With the regular shelf on the left of Figure 2 customers only have a frontal perspective on the items offered. The retailer only needs to determine the number of facings, e.g., items A and B get one and item C gets three facings. The right of Figure 2 illustrates a two‐dimensional shelf where the customer has a total perspective. The retailer must determine the total shelf quantity by choosing the shelf representation of an item, that is, the number of vertical facings (width dimension) and horizontal facings (depth dimension). For instance, item F gets a shelf representation of (1×2), item G (1×4) and item I (2×2). Two products with different sizes can be positioned next to (e.g., F and G) and above one another (e.g., F and I). This means that item arrangements also need to reflect a two‐dimensional neighborhood. With regular shelves, there is a horizontal division represented by the shelf levels. The allocation of items to shelf levels is therefore restricted by shelf height. For example, a large family pack with a high box cannot be put at low‐rise shelf level where small single‐unit items are put. This is not the case for two‐dimensional shelves where items do not necessarily need to be positioned along a dividing line or within a certain fixed compartment.

Illustration of a Regular and a Two‐Dimensional Shelf [Color figure can be viewed at
(2) Rectangular facing arrangements. On two‐dimensional shelves retailers usually arrange products in a rectangular shape, see e.g., empirical research in Marketing (Pieters et al. 2010) and Psychology (Berlyne 1958). Figure 3 shows two related arrangement examples for two‐dimensional shelves. This arrangement restriction implies that several facings of one item must be positioned adjacently and in a rectangular manner. For instance, if the retailer wants to place four facings of one specific product, these can only be positioned in three ways: (1×4), (2×2) and (4×1).
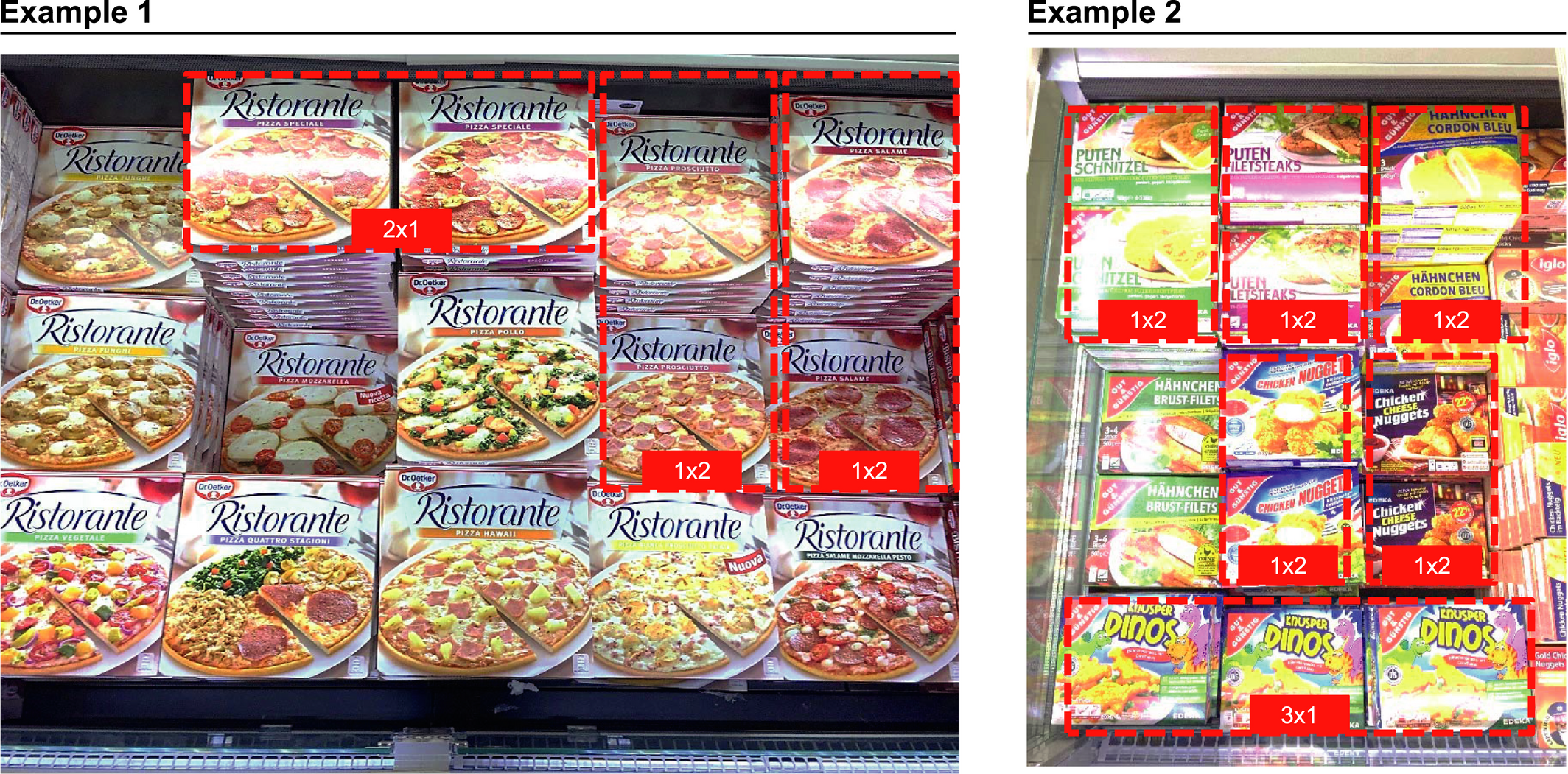
In‐Store Arrangement Examples for Two‐Dimensional shelves [Color figure can be viewed at
The rectangular requirement may result in “arrangement” and “prime number” defects if one‐dimensional solutions (e.g., 5 facings) are transferred to a two‐dimensional shelf setting (e.g., 2×2 facings). Arrangement defects occur if multiple rectangles (i.e., arrangements of different products) do not fit into one large rectangular arrangement (i.e., the shelf). Example 1 in Figure 4 shows this issue where not all facings of the optimal one‐dimensional solution can be placed on the shelf such as to maintain a rectangular shape. We use identically sized items to simplify the illustration. The total shelf space is 9 for the one‐ and two‐dimensional shelf. The optimal number of facings for the regular one‐dimensional shelf is A = 4 facings, B = 1 facings and C = 4 facings. On one‐dimensional shelves, an item with 4 facings is placed in one row (1×4), whereas on two‐dimensional shelves it can be placed in the form of 1×4, 4×1 or 2×2. Figure 4 shows that arranging both items A and C with 4 facings in a rectangular arrangement is not feasible as the total rectangular space is limited. The number of facings of item A or C therefore need to be reduced as only one item can have 4 facings. If, for example, item C now only has 3 facings, this may result in demand compensations by other items, and it may be preferable to list another item that compensates better the demand transfer between items.
Example 2 in Figure 4 presents the prime number defect. Due to the rectangular requirement, quantities with prime numbers (like 3,5,7,11,…) can only be arranged in a row (e.g., 1×3, 3×1, 1×5, 5×1, 1×7,…). However, if this row is larger than the total horizontal or vertical space, this is a non‐viable solution. The optimal number of facings of product A for a one‐dimensional shelf is 5 in Example 2. Since 5 is a prime number and is greater than the length or depth of the shelf, the item cannot be displayed in a rectangular manner. The defects can be expressed formally as follows. Consider S as the total (X×Y)‐dimensional space and




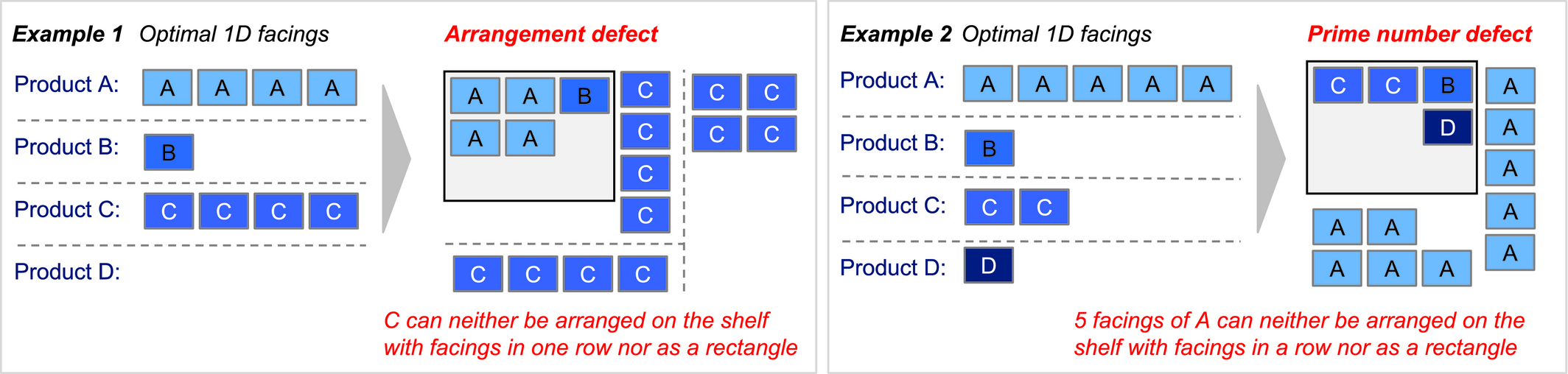
Characteristics of an Arrangement Defect (example 1) and a Prime Number Defect (example 2) [Color figure can be viewed at
Summary. To create a planogram for two‐dimensional shelves, a shelf planner needs to make three simultaneous decisions for each category:
Item selection: This decision involves determining the assortment of a category.
Space assignment: This decision includes determining the number of horizontal facings, number of vertical facings, quantity per facing, and ultimately also the total shelf quantity for each product. The facings of one product can be arranged horizontally next to each other or vertically above one another. The total number of facings results from the multiplication of all vertical and horizontal facings.
Item arrangement: This determines which vertical and horizontal coordinates are assigned an item, that is, its exact location on the shelf. Furthermore, this also includes how different items are positioned next to each other (e.g., different types of bread next to each other). Finally, these all need to follow arrangement guidelines so that a rectangular shape is obtained and adjacent requirements are adhered to.
Two‐dimensional shelves are differentiated from regular shelves in terms of the options for space assignment and item arrangement. For regular shelves, it is sufficient to use one‐dimensional models to determine the horizontal number of facings. Two‐dimensional shelves require a definition of horizontal and vertical facings in a rectangular shape. These rectangular shapes however depend on the arrangement of other items. An integrated approach is therefore required that simultaneously solves the four subproblems item selection, shelf quantity, space assignment and item arrangement. Solutions obtained from familiar one‐dimensional models cannot be transferred directly to two‐dimensional settings for this purpose as one‐dimensional models lack the number of vertical facings and the item arrangement.
Related Demand Effects
All aforementioned decisions, namely item selection, space assignment and arrangement impact customer demand in three ways (see also Hübner and Schaal 2017a):
(1) Space‐elastic demand. The more facings an item are assigned, the higher its visibility on the shelf and the greater its demand. This demand effect is called space‐elastic demand. Various empirical studies include tests that quantify space‐elasticity effects (cf. Brown and Tucker 1961, Curhan 1972, Drèze et al. 1994, Eisend 2014, Frank and Massy 1970). Chandon et al. (2009) show that the variation of facings is the most significant in‐store factor, even stronger than pricing. Desmet and Renaudin (1998) reveal that space elasticities increase with the impulse buying rate. The magnitude of this demand increase depends on the item’s space‐elasticity factor, which indicates the percentage increase in demand of an item every time the number of facings goes up by a given amount. Using a meta‐analysis, Eisend (2014) identifies an average demand increase by a factor of 17%. Cross‐space elasticity measures responsiveness in the quantity demand of one item when the space allocated for another item changes. Eisend (2014) calculates an average cross‐space elasticity of −1.6%. Schaal and Hübner (2018) used numerical studies to show that the low empirical cross‐space elasticity values either do not have or have only very limited impact on optimal shelf arrangements. We therefore disregard cross‐space elasticities in the following. The demand impact of an item’s position can be neglected for two‐dimensional shelves. These positioning effects are relevant to regular shelves where e.g., eye‐ vs. knee‐level positions have a different demand impact. The same holds true for large categories where the shopper’s walking path and positions at the beginning, middle or end of an aisle matter. With two‐dimensional shelves, however, the basic idea is to allow the customer to oversee the total assortment of one (sub‐)category at one glance.
(2) Out‐of‐assortment and (3) Out‐of‐stock substitution demand. Customers can substitute for their choice if items are unavailable. For example, Gruen et al. (2002), Kök and Fisher (2007), Aastrup and Kotzab (2009) and Tan and Karabati (2013) show that between 45% and 84% of the demand can be substituted. Unavailability of items can result from two scenarios: either an item is delisted as a consequence of the assortment decision (out‐of‐assortment, OOA), or it is temporarily unavailable and currently not available on the shelf (out‐of‐stock, OOS). In both situations, customers may replace the unavailable items with other items which results in demand increases for the respective substitutes.
Substitution rates can be obtained by direct consumer surveys or by transactional data (e.g., Kök and Fisher 2007, Tan and Karabati 2013). A straightforward approach often applied to obtain substitution rates is to base them on market shares (Hübner and Kuhn 2012). This means that if an item has an overall demand share of 50%, the substitution rate from all products to this particular product is 50%. Finally, expert workshops can also be used to define substitution rates by selecting related items and rates.
Related Literature and Contribution
Current shelf planning literature focuses on regular shelf types (see also the reviews of Hübner and Kuhn 2012, Kök et al. 2015). We will first analyze this stream of literature and divide it into contributions that assume a given assortment and into contributions that integrate the assortment decision into shelf planning. This review is mainly used to gain insight into the different approaches for modeling demand and solution approaches. Secondly, we focus on particular applications to two‐dimensional shelf space problems. This review is used to define open research gaps and specify our contribution.
(1) Applications for regular shelves. Most shelf‐space optimization models assume deterministic demand and optimize the number of facings for items with space‐elastic demand to be assigned to limited shelf space. Respective approaches help retailers solve the trade‐off between more shelf space (and thus demand increases due to a higher number of facings) for certain items and less available space (and thus demand decreases due to a lower number of facings) for other items. One of the first models goes back to Hansen and Heinsbroek (1979) who formulate a shelf‐space model that accounts for space elasticity and solve it using a Lagrangian heuristic. Corstjens and Doyle (1981) develop a shelf‐space model that accounts for space and cross‐space elasticities which is solved via geometrical programming. Zufryden (1986) presents a dynamic programming approach with space‐elasticity effects. Lim et al. (2004) present a model that considers space and cross‐space elasticities for which they develop various extensions, e.g., for product groupings. A specialized heuristic and the combination of a local search and a metaheuristic approach are used to solve it. Hansen et al. (2010) develop a formulation with space and cross‐space elasticities for which they compare the performance of various heuristic and meta‐heuristic algorithms. The model also differentiates between horizontal and vertical shelf positions. Bianchi‐Aguiar et al. (2015) use a mixed‐integer programming approach to formulate a deterministic model that considers product‐grouping and display‐direction constraints and incorporates merchandising rules. Hübner and Schaal (2017b) formulate the first stochastic shelf‐space model that is solved with specialized heuristics. They account for space and cross‐space elasticity as well as vertical positioning effects. The model assumes a given assortment and does not incorporate substitution effects. In summary, the shelf‐space models mentioned assume a given assortment and optimize the number of facings. They do not take into account substitutions for unavailable items.
We further investigate contributions that integrate assortment decisions into their models in the following. Hübner (2011) develops a mixed‐integer model for shelf‐space planning that also takes assortment decisions into account. OOA situations are considered, but because the model assumes deterministic demand, OOS is ignored. Irion et al. (2012) use a piecewise linearization technique to solve a deterministic shelf‐space model that accounts for space and cross‐space elasticities. Although the model accounts for the assortment decision by setting facings to zero additional demand for OOA substitution is neglected. Hübner and Schaal (2017a) proposed the first integrated assortment and shelf‐space optimization model that accounts for stochastic demand, substitution, and space elasticity. To the best of our knowledge, they present the most comprehensive demand model. They showed that assortment and shelf planning are interdependent when shelf‐space is limited. A heuristic was developed to address large‐scale problems. The heuristic approach was modeled as an iterative MIP algorithm that uses recalculated precalculations for each step to circumvent the nonlinear problem. The integrated approach outperforms alternative approaches, e.g., a sequential planning approach that first picks assortments and then assigns shelf space.
(2) Applications for two‐dimensional shelves. Solutions obtained from one‐dimensional regular shelf settings, such as the above, cannot be transferred to two‐dimensional shelves due to arrangement and prime number defects. Only Geismar et al. (2015) have developed a model and solution approach for two‐dimensional shelves. They assume multiple shelves that are called cabinets. Each cabinet can have a distinct number of columns and rows. The capacity (or number of slots) of a shelf can be calculated by multiplying the columns and rows. Each product must have all of its units displayed within a single cabinet, and those units have to be displayed in a contiguous rectangle. All units need to have standardized unit sizes. To formulate the model in a more realistic and flexible manner, Geismar et al. (2015) did not divide cabinets into subsections to reduce the solution space or rather the complexity. Their formulation makes it possible to apply all the different dimensions of the product presentation within one cabinet according to the restrictions mentioned. In contrast to the majority of existing shelf‐space models, the objective is to maximize revenues rather than profit. Moreover, demand effects such as substitution or space elasticity were neglected. Apart from that, the demand is assumed to be deterministically known. However, the demand is affected by the effectiveness of a row. Each row can have a distinct effectiveness value. Due to the fact that the MIP approach did not find a solution within a two‐week time limit, they broke the problem into two subproblems. First, the products are assigned to the cabinets. Secondly, the units are arranged within the cabinets. The evaluation of observed data revealed an average revenue improvement of 3.7%.
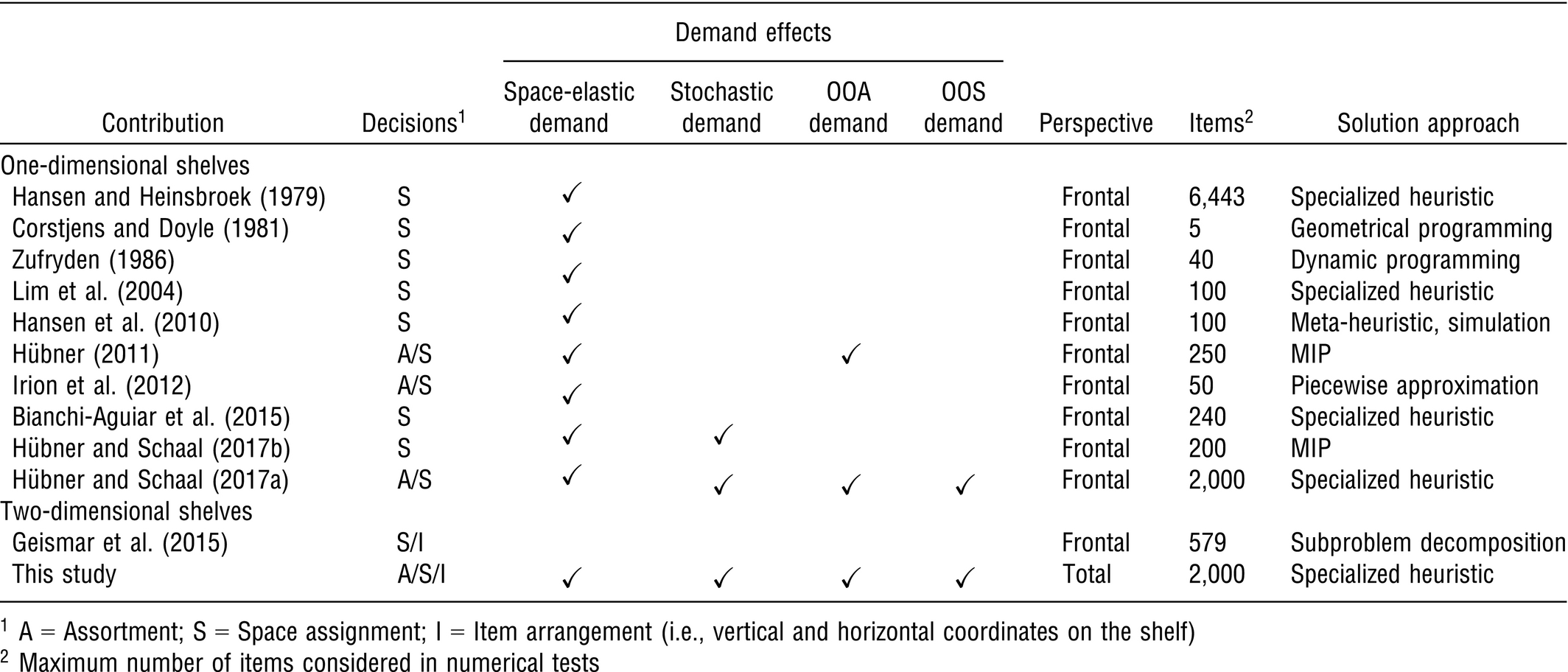
Summary. Table 1 gives an overview of the main contributions. The demand models and solution approaches for regular one‐dimensional shelves have gradually been refined. Hübner and Schaal (2017a) present the most comprehensive model by integrating assortment and space allocation and taking relevant demand effects into account, that is, space‐elasticity, OOA and OOS substitutions. Previous literature suffers from one or more of the following drawbacks. First of all, only isolated optimization of either assortments or shelf‐space, ignoring the interdependence of both decisions. Secondly, limited consideration of relevant demand effects. Thirdly, applicability in practice is constrained by the limited assortment sizes that can be solved. None of the one‐dimensional shelf models integrate the vertical and horizontal arrangement of items. Geismar et al. (2015) presented the first extension for two‐dimensional problems and define the position of products. However, they apply a very restricted demand model and do not optimize assortments.
Related Literature on Assortment and Shelf‐Space Optimization
We will base our extensions on the contributions of Geismar et al. (2015) and Hübner and Schaal (2017a). We contribute a new and more general approach by integrating assortment, space allocation and item arrangement decisions in a two‐dimensional shelf‐space setting. We further extend the demand model via space‐elastic demand and substitutions. This also includes the modeling of stochastic demand. Integrating demand volatility is relevant for retail settings (see e.g., Agrawal and Smith 1996 or Hübner et al. 2016), particularly for categories with perishable products (see e.g., Kök and Fisher 2007). This becomes even more important for two‐dimensional shelves as the majority of products kept on these shelves are perishable, e.g., fresh products like produce, products with limited sales periods like fashion and electronics. Finally, we relax the assumption of identical unit sizes as this does not hold true in most practical applications.
Development of the Decision Model
This section develops the Two‐Dimensional Stochastic Capacitated Assortment and Shelf‐space Problem (2DSCASP) in three steps: First, the decision model is formulated in section 3.1 which is then supplemented with the demand model in section 3.2. Finally, section 3.3 determines the arrangement and shelf space constraints. Table 2 shows the notation used.
Notation
Modeling the Decision Problem
The retailer must assign products of a particular category to a two‐dimensional shelf limited in size. That means considering a set of items 

which products to list at all (item selection), how much shelf space to allocate to the items listed (space assignment), how the total item quantity is presented through horizontal and vertical facings in a rectangular shape, e.g., 4×1 or 2×2, and where the product is positioned, that is, x‐ and y‐coordinates of the shelf space (item arrangement).
We introduce various decision and auxiliary variables to express these decisions. We allow the shelf quantity 












The item profit 









The profit for each item is calculated as shown in Equation 2 and consists of the following elements: The first term represents the overall purchasing costs, the second and fourth term calculate the expected revenues, the third term represents the expected revenues from leftover items sold for the salvage value, and the fifth term calculates the penalty costs in the event of stockouts. This generic form of the item profit 



The model does not force the user to completely fill the available shelf space. It is permitted to leave free spaces due to penalty costs for oversupply. In constellations with large shelves, low demand and high oversupply costs, for example, there could be situations where the full space is not used. However, this is assumed to be rather a hypothetical situation due to general space constraints in retail stores.
Modeling the Demand Function
The probability density function 



















The space‐elastic demand grows with a diminishing rate with 



The space‐elastic demand for an item i with 




Out‐of‐assortment demand. OOA demand for a listed item i (




The density function for OOA demand for item i is calculated by Equation 6. Since we assume that the distributions of the minimum demand of two items i and j, i≠j, are independent, the convolution – represented by the operator 








Equation 8 depicts the density function for OOS demand for item i. As above, we use the convolution to account for the fact that OOS demand for an item i depends on the expected shortage of all temporarily unavailable items other than item i. 
Modeling the Arrangement and Space Constraints
Before we specify the constraints of our problem, we give a broader context on the modeling of the arrangement constraints which also impacts the solution approach later on.
General modeling approach. Our problem belongs to the class of Two‐Dimensional Knapsack Problems. These problems deal with the selection and arrangement of a set of rectangles r ∈ R to a capacitated two‐dimensional rectangular container S with a certain width 





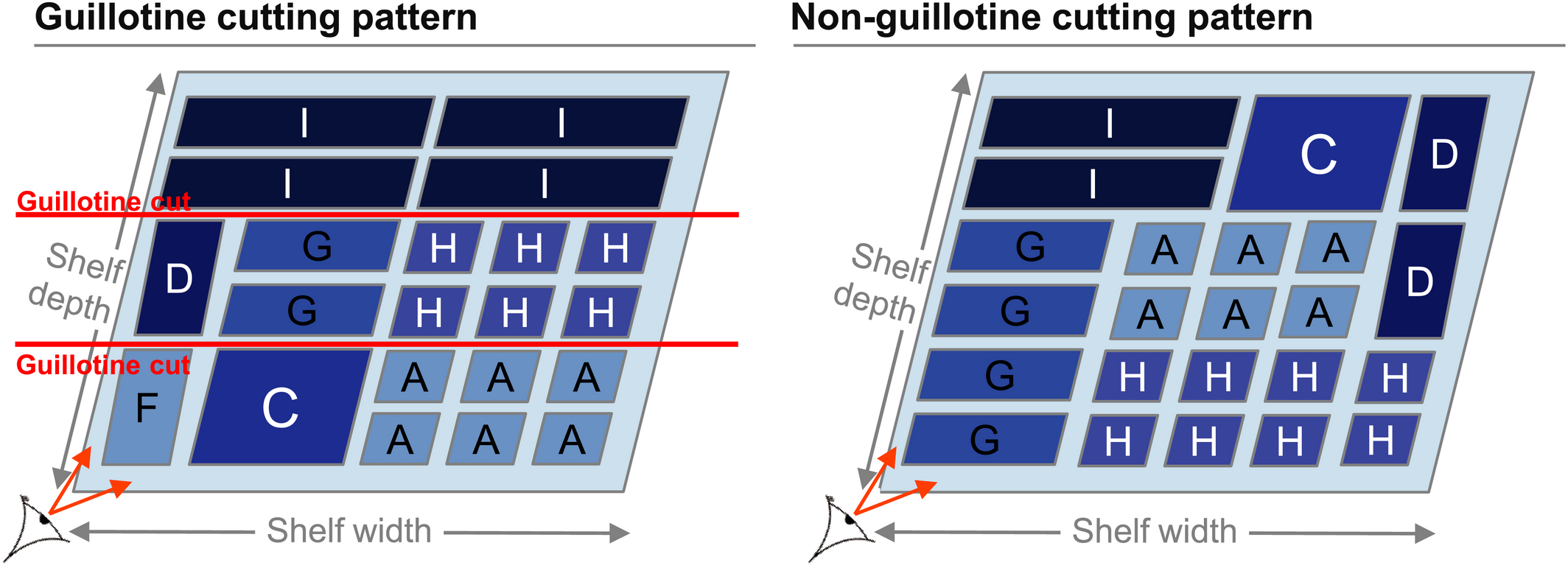
Guillotine Cutting Patterns [Color figure can be viewed at
Specification of arrangement and space constraints for 2DSCASP. We use the relative arrangement formulation of Pisinger and Sigurd (2007) as it meets the requirements of our application summarized above. This ensures proper arrangement of the selected items with their corresponding dimensions. We introduce the auxiliary variable 








The two‐dimensional shelf‐space limits are represented by 





















Heuristic Approach
The 2DSCTSP is compounded by the NP‐hard two‐dimensional Knapsack Problem (see Beasley 2004, Kellerer et al. 2004, Pisinger 2005, Pisinger and Sigurd 2007) and the NP‐hard assignment problem (see Hübner et al. 2016, Kök and Fisher 2007). The combinatorial complexity of the latter increases very rapidly with the number of items being considered, N, and the shelf‐space size S. The total number of possible allocations (Y) to a one‐dimensional container can be calculated as expressed by 




Structure and notation. We will use the general algorithmic‐related terms “container” and “rectangle.” A set of small rectangular pieces has to be allocated to a larger rectangle, known as a container. In our application, the container is equal to a shelf and a rectangle represents certain facing and arrangement options of a certain item. The algorithm is developed with object‐oriented programming standards to avoid a complex de‐/encoding of the solution of each individual object. Instead of complex encryption to represent the different rectangles with their corresponding attributes, the references of the objects are taken into account to execute genetic operations. This ensures that no information is lost while performing the operations and all attributes are accessible at any time. The decoding is implemented as an object function that invokes the operation that arranges the rectangles onto the container and calculates the fitness of the individual. Extensive en‐/decoding to or of a binary, a permutation or a value notation are not necessary. We refer to Keijzer et al. (2002), Krishnamoorthy et al. (2002) and Zhang and Wong (2015) for similar implementations of object‐oriented evolutionary algorithms. The necessary components for the implementation are detailed in the Appendix with the help of Unified Modeling Language (UML).
Configuration Settings of the Genetic Algorithm
The algorithm starts with input of the set of items N, shelf dimensions 

Step 1 generates the set of possible rectangles for each item, i ∈ N. It takes into account the shelf dimensions 



Following Step 2 generates a start population. We implemented two different options. In the simple case, a random start solution (RSS) is applied. In the advanced version, an adapted one‐dimensional start solution (ASS) is generated using the model and solution approach of Hübner and Schaal (2017b). They develop an iterative heuristic that solves a MIP for the assortment and space allocation problem in the first step and, in the subsequent step, updates the demand calculation according to the shelf configuration of the first step. This procedure is repeated until a solution‐quality‐related termination criterion is met. We extend this approach by using a constraint in the MIP to directly eliminate the prime number facings that exceed one 

Step 3 allocates the rectangles to containers. So far, the algorithm is composed of a population of individuals where each individual consists of a single container that contains one or multiple rectangles and where each rectangle has an item reference. We use the BL‐F pack heuristic to fill up the containers. Hopper and Turton (2001) identified the BL‐F as an efficient approach for the two‐dimensional packing problem. The BL‐F is a modified version of the bottom‐left (BL) pack heuristics. The BL algorithm starts with placing each rectangle in the top right corner of the container. From there, the rectangle slides as far as possible (without crossing another item) to the bottom and then as far as possible to the left of the container. This movement process is repeated until the rectangle can no longer be moved, that is, the rectangle collides with another rectangle or the frame of the container. This makes full use of the rectangle. The disadvantage of the BL algorithm is the empty space within the container. In contrast to this, the BL‐F algorithm seeks the lowest left position in the container that the rectangle can fit into. This approach makes it possible to occupy what were previously empty spaces but also leads to a higher runtime. Furthermore, Hopper and Turton (2001) show computational benefits if the rectangles are sorted and filled by size 
After this, rectangles are allocated and the fitness of each individual is evaluated in Step 4. The algorithm is terminated based on maximum runtime, number of populations or solution quality improvements. If the termination criterion in Step 5 is met, the fittest individual is displayed. Otherwise, the loop of Steps 6 to 11 is executed until the termination criterion is met.
Steps 6 to 8 describe the GA operator’s selection, crossover, and mutation. The selection operation in Step 6 intensifies the average fitness of a population through duplication of the fittest and disposal of the weakest individuals. We use different approaches. In wheel selection (WS), the selection probability of an individual is calculated by dividing the fitness of a selected individual by the total cumulative fitness of all individuals. This approach ensures that stronger individuals are more likely to be included in the adapted population than weaker ones. Tournament selection (TS) is based on the comparison of two randomly picked individuals of a population. The individual with the higher fitness score is selected for the adjusted population. All chosen or not chosen individuals remain in the basic population and can be selected again. Rank selection (RS) reevaluates the fitness of each individual depending on the fitness ranking. The technique takes the rank of the fitness value and not the nominal value into account. A common approach is to rate the worst as fitness 1, the second worst as fitness 2, and so on. The best is rated as N, where N equals the number of individuals considered.
The crossover operation in Step 7 is a method for interbreeding the individuals of the selected population to form a new offspring population. Crossover is performed with a specified probability rate. The crossover operation can be executed with a fixed number or randomly generated amount of crossover points. The points are most evenly divided depending on the quantity of items, that is, to build equal sized crossover parts the length of the individual is divided by the amount of crossover points, whereby the last part contains the size of the modulo value. All items between the crossover points alternately remain part of the individuals or swap between the individuals. In the mutation operation in Step 8, small segments of the individuals of the new offspring are randomly modified. The purpose of this is to preserve diversity across generations. The mutation probability rate and the variance of the modification can be chosen. During the execution, the new quantity of the item is also randomly transferred to feasible two‐dimensional spaces.
In Steps 9 to 12, all rectangles within each individual are allocated and evaluated. Crossover and mutation operations modify individuals so much that there is a high probability of losing the fittest individual across the following generations. Hence, an elitism method is applied to preserve the fittest individual across the next generations. The overall fittest individual is saved and injected into a population if the fittest individual of this population is not at least as fit as the fittest overall. The fittest individual of this generation is compared with the individual that is fittest overall to determine the new individual that is fittest overall. Then the algorithm returns to Step 5.
Numerical Results
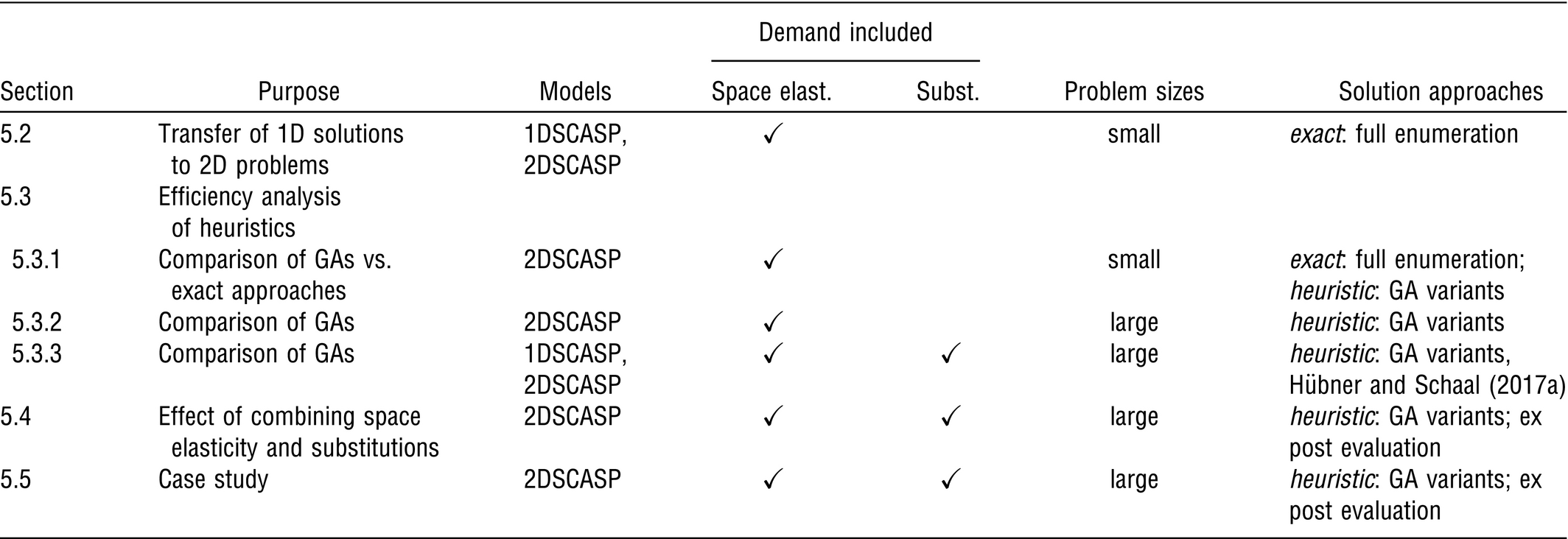
In this section, we first describe the test setting before then conducting various numerical analyses with simulated data and data from a case study and different variants of the model. We gradually increase the complexity to demonstrate the efficiency of the models and solution approaches step by step. Section 5.2 investigates the error range if the solutions of a one‐dimensional model (1DSCASP) are transferred to a two‐dimensional problem (2DSCASP). The heuristic approaches are analyzed and compared in terms of runtime and solution quality in section 5.3. Section 5.4 assesses the impact of demand effects and correctly accounts for stochastic demand, space elasticity, and substitution on profit as well as facing changes. Finally, we apply our model to a case study in section 5.5. Table 4 gives an overview.
Overview of Numerical Tests
Data Generation and Test Setting
To generalize our analysis, all input parameters are randomly generated within sections 5.2–5.4. We generated parameter values within reasonable ranges derived from literature or from the cooperation with a retailer. There are either sources from empirical studies (e.g., Campo et al. 2004, Gruen et al. 2002 or Aastrup and Kotzab 2009 for the range of substitution rates; Desmet and Renaudin 1998, Drèze et al. 1994 or Eisend 2014 for space‐elasticity effects) or from other comparable modeling approaches (e.g., Hübner et al. 2016, Kök and Fisher 2007 for the ranges of profits and over‐/undersupply costs). In generating our data sets, we thus used conventional practice and followed the suggestions of previous literature. We made the data available at GitHub (











Transfer of One‐Dimensional Solutions to Two‐Dimensional Problems
The one‐dimensional solution is easier to obtain, but it may not be a feasible solution due to arrangement and prime number defects (also see section 2). This analysis serves to assess the error impact of transferring solutions obtained by models that are based on one‐dimensional shelf space to settings with two‐dimensional shelf space. The best case would show that one‐dimensional solutions are a good approximation for the two‐dimensional problems. We solve the following three models exactly: 1DSCSP includes prime numbers, 1DSCSP


Frequency of defects. Table 5 reveals the occurrence of defects. The arrangement and prime number defect of the one‐dimensional solution appear in all settings. Arrangement defects can be found in 14% and prime number defects in 32% of the cases. In some cases both defects exist. Consequently, one or both defects occur in 41% of cases.
Analysis of Arrangement Defects of 1D Solutions, Average of 100 Instances

Profit impact of defects. Table 6 summarizes the profit impact due to the required arrangements on a two‐dimensional shelf. It compares the exact solutions of the 2DSCSP with the 1DSCSP. The latter do not consider the rectangular arrangement and prime number requirements, whereby 41% of 1DSCSP solutions are non‐viable solutions for the 2DSCSP. These additional requirements in the two‐dimensional problem lower the profit by 0.8% on average. Hence, this expresses the total profit impact caused by the rectangular arrangement and prime number constraint. In other words, theoretically the feasible solution yields 0.8% lower profit compared to the non‐viable solution without prime number and arrangement constraints.
Profit Comparison of 2DSCSP vs. 1DSCSP, 100 Instances

1Calculation: 2DSCASP profit / 1DSCASP profit
Arrangement and prime number defect. To quantify the individual profit impact for each type of defect, we compare the 1DSCSP and the 1DSCSP
Profit Comparison of Exact Solutions: 1DSCSP

1Calculation: 1DSCSP
Summary. The one‐dimensional solution is easier to obtain, however, it is not a feasible solution due to arrangement and prime number defects. These requirements impact optimal allocation. The optimal item quantities of the two‐dimensional problem differ from those of the one‐dimensional problem. Due to the additional constraints in the 2DSCSP, the total profit will always be equal or below the 1DSCSP. The corresponding one‐dimensional solution approaches are not readily appropriate methods for solving two‐dimensional problems. It has to be considered that in cases where the one‐dimensional solution does not fit onto the two‐dimensional shelf space, quantities of items need to be adjusted. It is not obvious which item quantities have to be increased or decreased to achieve the best feasible solution (e.g., via simple rounding or greedy heuristics). The decision process becomes even harder when substitution effects in the model are considered due to the demand interdependencies between the items. The consequence of this is that the loss in solution quality would be significantly higher if using the one‐dimensional model.
Efficiency Analysis of Heuristics
Comparison of Heuristics with Space Elasticity vs. Exact Approaches
This section examines the efficiency of the heuristic developed. To validate the GA it is compared to a full enumeration (FE) applied to smaller problem sizes. The GA is executed as described in section 4 with a RSS and the selection methods WS, TS, and RS. The random crossover operation and the elitism operation are applied. Mutation operations are not reasonable and can be neglected due to the small size of problem instances. Pretests have shown that a termination criterion of 100 seconds is more than sufficient to return the best solution.
Runtime. Table 8 summarizes the computation time. For the FE, it shows that the median runtime increases between four to ten times if the set is extended by only one additional item. A similar magnitude is recognizable when the space is extended gradually. For the different implementations of the GAs, the runtime is significantly lower and the increases for extended problem sizes are much lower. Furthermore, the runtimes of the WS and TS are below 4 seconds on average in all instances. The smallest median execution time across all 600 problem instances was achieved via the TS, and is over 120 times faster than the FE.
Median Runtime of Different Approaches, in seconds, 100 Instances

Solution quality. The solution quality of the GA methods compared to the optimal solutions is shown in Figure 6. The boxplots show that the median is 100% in all three variants. Additionally, the data evaluation reveals that the average solution quality exceeds 99% in all cases. The first quantile is equal to 100% for the WS, and is greater than 97% for the TS as well as the RS.

Solution Quality of Different Selection Operations in Comparison to the Exact Solution [Color figure can be viewed at
In reference to the solution quality, the WS is slightly better than the TS and the TS is slightly better than the RS. To figure out what selection method is better suited for more extensive problem settings the execution time as a ratio of the solution quality achieved is examined more precisely. Problems five and six of Table 8 are considered which together consist of 200 problem instances. Figure 7 shows the median solution quality of the best individual solutions achieved up until the time shown on the x‐axis. The curve of the RS obviously increases more slowly than the curves of the other selection methods and the solution quality of the TS increases slightly faster compared to the WS. In conjunction with the results of Table 8 that have been discussed RS does not appear to be a suitable selection approach.

Median Solution Quality Depending on Execution Time [Color figure can be viewed at
Summary. The results show that the median runtime for the FE increases exponentially as the number of items N and shelf space 
Efficiency Analysis of Heuristics with Space Elasticity for Extensive Problem Settings
Three more extensive problem settings of practice‐relevant size are tested. The number of products and shelf space are increased in steps and the number of facings is increased to 
Runtime. Table 9 once again shows that the TS is faster than the WS (GA WS vs. GA TS) for the smaller instances with 20 items. If the median runtime is close to the limit applied of 500 seconds, it means that in many cases the best solution has not yet been found due to the termination criteria. This means that the GA would still improve the solution with longer runtimes. This is the case for all GA WS applications and for the larger GA TS applications with 50 and 100 items. However, a significant runtime improvement can be obtained by applying the ASS. This makes it possible to obtain solutions within a few seconds, even for larger problems. Where the ASS TS has significantly shorter runtimes than the ASS RS.
Median Runtime for Larger Problems, in seconds, 100 Instances, Rum Time Limit 500 seconds

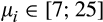
Solution quality. There is no exact solution available that can be generated in reasonable computation time. We therefore use a benchmark. We use the solutions of the 1DSCASP

Summary. The FE only has acceptable runtimes for very small problem sizes. This means it is not an appropriate procedure for real‐world problems. The GA configured with the selection operation WS and TS performs well for small and medium problem sizes. For more extensive problem settings, the GA with a RSS also leads to unsuitable runtimes. The increasing number of products and larger shelf space generate higher degrees of freedom. This results in greater opportunities for allocating the optimal item quantities onto the shelf space. As a result, the GA mostly only faces the prime number defects in more extensive problem settings, which makes the ASS an appropriate approach for solving them.
Efficiency of Heuristics with Space Elasticity and Substitutions
In this section, the model is extended by the substitution effects. To obtain a first indication that the GA is suitable to account for substitution effects, GA TS and GA ASS TS are compared to the heuristic approach AMIOAS (Algorithm for Mixed‐Integer Optimization of Assortment‐ and Shelf‐space problems) of Hübner and Schaal (2017a). Since this approach is only appropriate for the 1DSCASP with substitution, the GA is also applied to this setting with large problem settings. A second comparison with the GA TS and the GA TS ASS is applied to the two‐dimensional problem.
Algorithm suitability test for substitution effects. Tables 10 and 11 summarize runtime and the solution quality of the GA TS for the 1DSCASP. The model of Hübner and Schaal (2017a) is therefore a special case as it only yields feasible one‐dimensional solutions as it does not take into account two‐dimensional shelf space. The median solution quality of GA TS compared to AMIOAS is 99.2% and ranges between 97% to 99.9%. Despite the higher runtime and slightly lower solution quality for most problem settings, the GA TS has demonstrated appropriate performance for addressing substitution effects.
Runtime of GA TS for 1DSCASP, in seconds, 100 Instances

Median Solution Quality GA TS vs. AMIOAS for 1DSCASP, 100 Instances

1 Calculation: GA TS profit / AMIOAS profit
Algorithm with a refined start solution to meet substitution effects. Due to the fast convergence times of Hübner and Schaal (2017a)’s algorithm, we will use an adjusted version of ASS in which the AMIOAS results are used as a start solution. Table 12 presents the percentage variance of the solution quality between the GA TS ASS and the GA TS after the limited runtime of 1,000 seconds. It shows that the GA TS ASS has achieved a 15.7% higher median on average for the most extensive problem setting. The difference between the two approaches is in evidence with a closer look at the time at which the best solution was found. The average median time of the smallest problem setting in Table 10 is 471 seconds for the GA TS, compared to 11 seconds for the GA TS ASS.
Profit Difference between GA TS ASS and GA TS for 2DSCASP, in %, 100 Instances

1 Calculation: (AMIOAS / GA TS profit profit −1) × 100
Summary. The numerical results with the integration of substitution effects has shown that the heuristic developed is suitable for addressing these effects. The second analysis has shown that an intelligent start solution is advisable with substitution effects, too.
Effect of Combining Stochastic Demand, Space Elasticity, and Substitution
Because this is the first integrated stochastic model for two‐dimensional shelf spaces that accounts for space elasticity and substitution, this section illustrates the difference vis‐à‐vis the existing two‐dimensional model of Geismar et al. (2015) who do not account for demand effects. Total profits and shelf quantity assignments are compared. The parameters CV and β cover the values 0 and 0.35 with an interval of 0.05. The substitution rates considered range between 0 and 0.7 in 0.1 increments. All resulting combinations of the three parameters are evaluated. To investigate the impact of ignoring stochastic demand, space elasticity and/or substitution, a retailer is considered who makes assortment and facing decisions by assuming CV = β = λ = 0, while in reality there are CV > 0, β > 0 and λ > 0. To do so, we first run the model with CV = β = λ = 0 and evaluate ex post the results with the actual demand effects with CV > 0, β > 0 and λ > 0. This result is compared with an optimization run where the actual values of CV, β and λ are directly applied. This allows computing the impact of incorrect demand assumptions on assortment and facing decisions as well as the profit.
Profit Levels of GA Variants, in % of Benchmark Approach, Across all 300 Extensive Problem Settings [Color figure can be viewed at
Figure 9 shows that the retailer gains up to 78% more profit on average (i.e., when β = 0.35, λ = 0.80 and CV = 0.35). Additionally, Figure 10 shows that up to 100% of all items get different facing quantities if stochastic demand, substitution, and space‐elasticity effects are correctly taken into account. It becomes clear that all three demand effects need to be considered jointly.
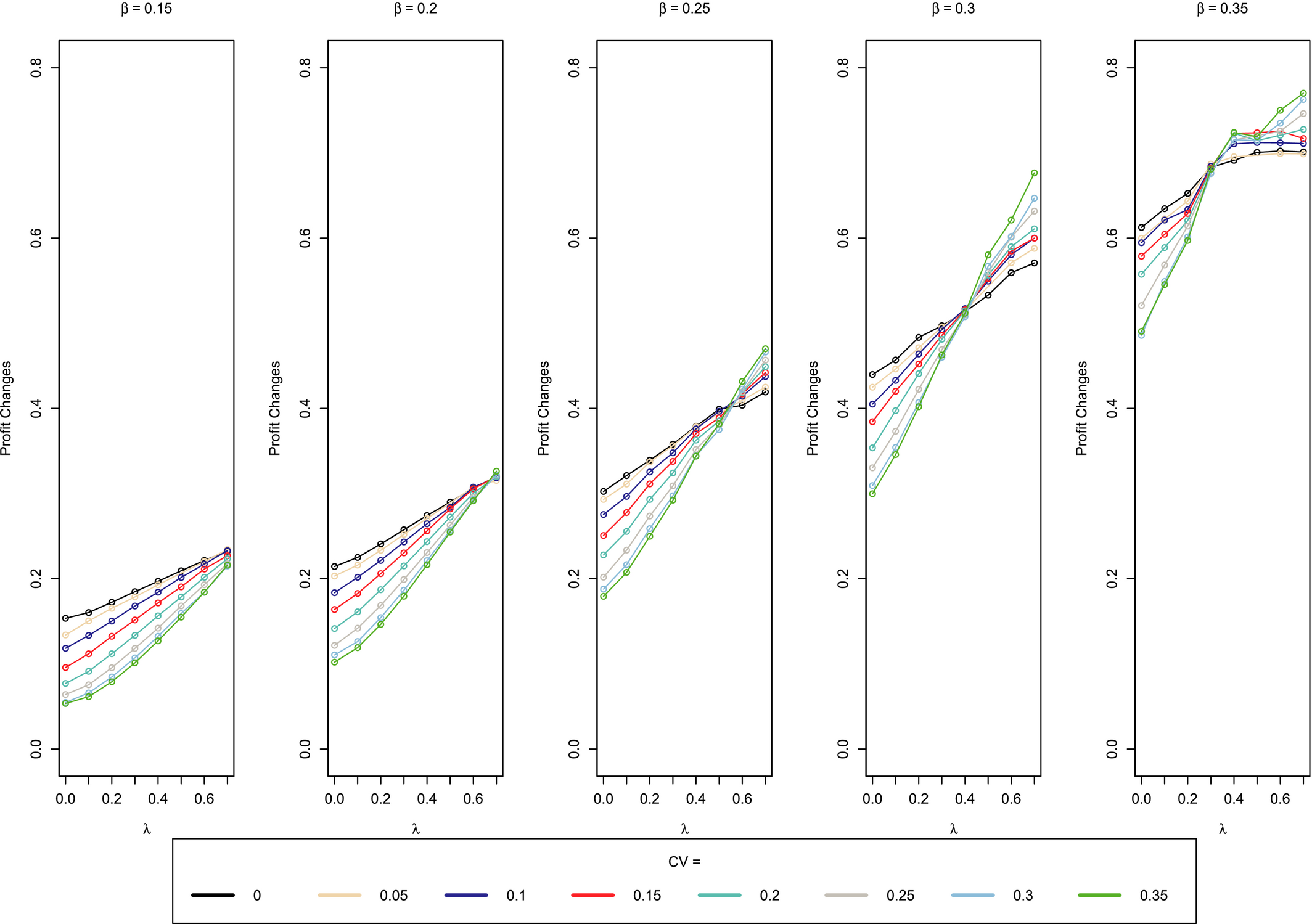
Profit Changes [Color figure can be viewed at
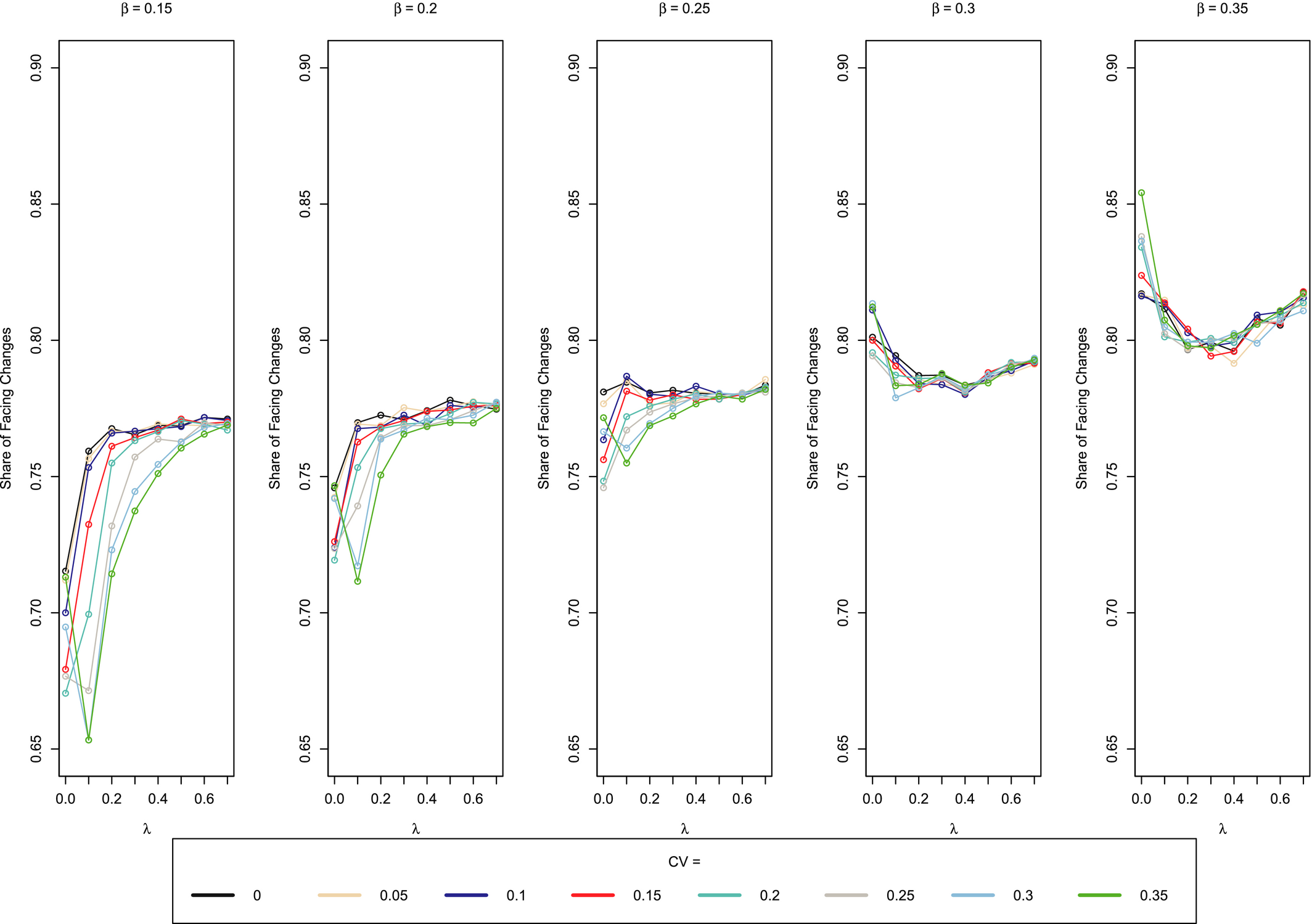
Share of Facing Changes [Color figure can be viewed at
Case Study
After having shown that 2DSCASP can be efficiently solved to near‐optimal results within very short runtimes, it will be applied on a real data set in this section. The daily sales data of an assortment of 21 varieties of bread roll were collected at one of Germany’s largest retailers. Substitution rates between the items were identified using customer surveys. We interviewed n = 2,412 customers and asked them which substitute they would purchase if their first choice were unavailable. Asking customers whether the product they bought was really their first choice also captured substitute purchases for items that are actually unavailable. The substitution rates between two items i and j were then obtained by 










Table 13 shows the profit potential from applying our model. The retailer can increase profits by up to 15% depending on the assumed space elasticity. Furthermore, it can be seen that optimized assortments contain up to 38% fewer items than the current assortment. The increase in space elasticity leads to more shelf space for the most profitable items. This results in smaller assortments and an increasing number of items with facing changes.
Results of Case Study
1 Calculation: (2DSCASP profit / 2DSCASP
2 Optimized assortment size as a share of current assortment size
3 Share of items with facings different to current facings
4 Standard deviation of absolute facing quantity changes
As a result of the remaining uncertainties of determining the parameters, we analyzed the profit potential together with the retailer depending on parameter robustness based on the average space elasticity of Eisend (2014). Moreover, we investigated the options for defining the appropriate shelf space for the bread roll category. We applied a sensitivity analysis for that purpose. To do this, the estimated substitution effects λ, variation coefficients CV and shelf space S are individually adjusted pro rata between 60% and 140% in 10% increments, whereas the other parameters remained unaffected. To ensure in‐store practicability, 20% increments are used for the shelf space. Table 14 shows that in a higher existing parameter ratio, substitution effects λ and shelf space S create more profit, whereby variation coefficients CV lead to decreasing profit. The following profit‐oriented managerial insights can be concluded for the retailer:
Profit Potential Depending on Parameter Robustness
Inaccuracies in estimating the substitution effects have a slight impact on profit. Slight deviations in determining the variation coefficients significantly affect profit. If there is additional shelf space available, the retailer should enlarge the shelf space size for the bread roll category to increase profit.
Conclusion and Outlook
Conclusion Our model integrates assortment and shelf‐space optimization and takes into account stochastic demand, substitution and space elasticity. It supports retailers in creating a planogram for two‐dimensional shelves by determining optimal assortments and shelf quantities as well as the adjacently rectangular arrangement of each item’s facings. It is an integrated approach that simultaneously solves the four subproblems item selection, shelf quantity, facing arrangement, and item arrangement. Previous shelf planning literature focuses on regular shelf types where customers just see the foremost unit of an item. Solutions obtained for regular shelves cannot easily be transferred to two‐dimensional and tilted shelves. The combinatorial complexity of the model leads to a rapid increase in runtime with the number of items and the shelf‐space size. We developed a problem‐specific specialized heuristic that is based on a GA. In the numerical results we have shown that one‐dimensional solution approaches of current literature are not readily appropriate methods for solving the two‐dimensional problems, our algorithm efficiently yields near‐optimal results as our specialized heuristic achieves >99% of the exact approach on average for small instances, neglecting stochastic demand, substitution and space elasticity leads to 78% lower profits and changes in facings of up to 85%, and in a numerical analysis with the scope of one of Germany’s largest retailers, it may be possible to increase profits by up to 15%.
Future areas of research. Various opportunities exist for further research. Our model is based on several assumptions that could be relaxed in the future, e.g., we assumed that substitution takes place across one round only. Future models could account for several rounds of substitution, if substitutes are not available. The extension of our model is linked to the further development of solution approaches. Further heuristics can be developed to approach the stochastic nonlinear problem. Another topic of research interest is combination of the tactical problem described in this study with operational topics, such as shelf refilling, order management and inventory accuracy (cf. e.g., Curseu et al. 2009, DeHoratius and Raman 2008, DeHoratius and Ton 2015, Donselaar et al. 2010, Sharma et al. 2019, Xue et al. 2017). Further extensions in this area would address additional operational restrictions in backroom inventory and delivery frequency (cf. e.g., Eroglu et al. 2013, Holzapfel et al. 2016). Finally, the question of how a multi‐store environment can be taken into consideration requires investigation. For example, Bianchi‐Aguiar et al. (2015) developed an approach to replicate a standard planogram for several stores of a retail chain. A holistic multi‐store approach would also consider the potential impact of store segmentation on the efficiency of supply chain processes. The model and solution approach presented in this study has laid the foundation for these research questions.