
Abstract
Objective:
Four studies were conducted to assess bicyclist conspicuity enhancement at night by the application of reflective tape (ECE/ONU 104) to the bicycle rear frame and to pedal cranks.
Background:
Previous studies have tested the benefits of reflective markings applied to bicyclist clothing. Reflective jackets however need to be available and worn while reflective markings enhance conspicuity without any active behavior by the bicyclist.
Method:
In the first study, reflective tape was applied to the rear frame. Detection distance was compared in four conditions: control, rear red reflector, high visibility jacket, and reflective tape. In the second study, the same conditions were studied with night street lighting on and off. In the third study, detection and recognition distances were evaluated in rainy conditions. In the fourth study, visibility was assessed with the reflective tape applied to pedal cranks.
Results:
In the first study, the application of reflective markings resulted in a detection distance of 168.28 m. In the second study, the detection distance with reflective markings was 229.74 m with public street light on and 256.41 m with public street light off. In rainy conditions, detection distance using the reflective markings was 146.47 m. Reflective tape applied to pedal cracks resulted in a detection distance of 168.60 m.
Conclusion:
Reflective tape applied to the rear bicycle frame can considerably increase bicyclist conspicuity and safety at night.
Application:
Reflective tape is highly recommended to complement anterior and rear lights in bicycle riding at night.
Introduction
Cyclists, while relatively small in numbers in proportion to motorized vehicles, have a high level of vulnerability, creating a significant need to better understand the characteristics specific to this user group (Broughton et al., 2012). Across European countries, the percentage of cyclist fatalities in the total number of road accidents in the year 2010 was 6.8%. There appears to be a large proportion of cyclists of 60 years or older who die as a result of an accident (50%) (Broughton et al., 2012).
Self-reported near-miss crashes are significantly higher for cyclists compared to motorists and comparable to that of pedestrians (Joshi, Senior, & Smith, 2001). This has been cited as a major reason why people choose not to cycle in traffic (Daley, Rissel, & Lloyd, 2007). A significant number of crashes between vehicles and cyclists are due to the “looked-but-failed-to-see” phenomenon (Herslund & Jorgensen, 2003), where drivers fail to detect the cyclist in time to prevent the crash even though they reported that they had looked correctly in the direction of the cyclist.
Insufficient conspicuity of the cyclist can promote late detection and looked-but-failed-to-see crashes. Research has shown that increasing the use of visibility aids may improve the ability of drivers to detect cyclists and pedestrians (Kwan & Mapstone, 2004). The severity of injuries in case of crash is strongly influenced by cyclist visibility. Wearing high visibility clothing more frequently significantly reduces the number of days off work following a bicycle crash injury (Thornley, Woodward, & Langley, 2008). Hagel, Romanow, Morgunov, Embree, and Couperthwaite (2014) examined 278 cases of injured bicyclists and found that upper body clothing color (red, orange, yellow) significantly reduced the odds of a motor vehicle collision during daylight. With darkness, the most effective protection was a tail light.
While cyclists are generally well informed regarding the need to wear high visibility clothing and are aware of the benefits of visibility aids such as reflective vests and lights, they do not use such aids on a regular basis (Hagel et al., 2007; Wood, Chaparro, & Hickson, 2009). Mayr et al. (2003), McQuire and Smith (2000), and Mulvaney, Kendrick, Watson, and Coupland (2006) have suggested only 10% to 32% visibility aid use for bicyclists and pedestrians. Cyclists, like pedestrians, do overestimate their own visibility, both with and without visibility aids (Tyrrell, Wood, & Carberry, 2004; Wood, Lacharez, Marszalek, & King, 2009; Wood, Tyrrell, Marszalek, Lacherez, & Carberry, 2013). In Wood, Lacharez, et al. (2009), cyclists reported that the distance at which they would be first recognized by a driver was twice that estimated by the drivers, especially at night.
Madsen, Andersen, and Lahrmann (2013) have investigated the safety effect of using daytime running lights for bicycles in a 12-month recording of accident rates. They found a reduction by 19% of accidents with personal injury, indicating that the permanent bicycle running light significantly improves traffic safety for cyclists. Permanent lights are favored by the development of frictionless magnet lights, which, compared to the classic dynamo set, are silent and induce less physical strain on the cyclist. Walker, Garrard, and Jowitt (2014) looked at the effect of bicyclist appearance on drivers’ overtaking proximity and found that cyclist outfitting was not very effective in preventing close overtakes.
Despite much lower exposure rates than during daytime, 31% of bicycle fatalities occur when it is dark (Broughton et al., 2012). Jaermark, Gregersen, and Linderoth (1991) in a study of Swedish cyclists found that 40% of bicyclist fatalities were reported to occur at night. Injury risks for cyclists are higher by a factor of 2 in darkness compared to daylight. For rural areas, this was about a factor of 5 higher (Johansson, Wanvik, & Elvik, 2009; Twisk & Reurings, 2013).
A high proportion of bicycling fatalities are related to problems with frontal rather than rear conspicuity (Gale & Cairney, 1998; Tin Tin, Woodward, & Ameratunga, 2013). Motorists involved in collisions with bicyclists at night often state that they did not see the bicyclist until it was too late to stop in time (Blomberg, Hale, & Preusser, 1986; Räsänen & Summala, 1998). Crashes are also common when bicyclists expect drivers to give them right of way and drivers fail to yield.
Another strategy to improve conspicuity is to rely on the perception of biological motion, which is particularly enhanced in humans. Different studies (Balk, Tyrrell, Brooks, & Carpenter, 2008; Blomberg et al., 1986; Owens & Antonoff, 1994; Wood, Tyrrell, & Carberrry, 2005) have investigated how this sensitivity can be used to enhance the nighttime conspicuity of pedestrians. Wood et al. (2012) have investigated the conspicuity enhancement induced by bicyclist clothing. In particular, they found that reflective markings on a bicyclist’s ankles and knees provided significant nighttime conspicuity benefits beyond that provided by a reflective vest alone. The benefits of reflective vests placed only on the chest have been investigated by Balk, Graving, Chanko, and Tyrrell (2007). Wood, Marszalek, Lacherez, and Tyrrell (2014) have assessed the benefits of reflective strips on nighttime road workers.
In many countries, reflective markings are compulsory only for trucks and articulated vehicles heavier than 3.5 tons and only on the rear and lateral sides in order to highlight the vehicle borders and outline. This practice has shown to be very effective, reducing rear and side impact collisions with tractor-semitrailers at night of about 25% and 15%, respectively (Burger, Mulholland, & Smith, 1985). More recently, Sullivan and Flannagan (2012) have computed fatal collisions involving heavy trucks, considering an interval of 23 years, finding a 60% decline in rear impact collisions and a 55% decline of angle collisions in the case of conspicuity treatments with reflective strips that complied with ECE/ONU 104 regulation. Conspicuity treatments appear therefore to efficiently reduce the risk of collision with heavy trucks in dark conditions. In line with these results, we suggested that reflective markings applied to the bicycle frame could significantly improve bicyclist safety.
We explored in four studies whether the application of reflective markings on different parts of a bicycle frame would provide significant nighttime conspicuity benefits. Conspicuity enhancement was measured assessing both detection and recognition distances. The reflective material tested complied with ECE/ONU 104 regulation and consisted of flexible, enclosed lens and prism reflective film for use with vehicles for traffic safety. These reflective tapes are available in different colors with different reflective coefficients.
The property of reflective materials is that light rays are returned from the source direction. They appear brightest to an observer located near the original light source, such as a car’s headlights. Since very little light is scattered when the light is returned, reflective materials enhance the contrast of the wearer to an observer located near the original light source. Contrary to fluorescent materials that bring most benefits during daytime, dawn, and dusk, reflective materials offer great nighttime benefits and do not enhance conspicuity during daytime. Reflective materials require a light source to operate.
The aim of the first study was to compare bicycle conspicuity enhancement induced by ECE/ONU 104 reflective markings when compared to other more traditional forms of conspicuity enhancement: a red rear reflector and a high visibility jacket. A control condition without any conspicuity equipment was considered as baseline. In the second study, bicycle conspicuity enhancement induced by ECE/ONU 104 reflective tape was assessed with public street lighting on and off. In the third study, bicycle conspicuity enhancement with ECE/ONU 104 reflective tape was evaluated during rainy weather conditions and on wet road surface. In the first three studies, reflective markings were applied on the rear bicycle frame (rear forks, seat post, rear reflector), while in the fourth study, the effect of the ECE/ONU 104 reflective tape was assessed when applied on pedal cranks with the hypothesis that mechanical pedal movement would enhance visibility. In all studies, the cyclist visibility from behind was the critical variable. We expected that the use of reflective tape would significantly enhance bicycle conspicuity.
Study 1
Method
Participants
The sample was composed of 6 females and 10 males. Mean age for males was 27.84 ± 6.93, and mean age for females was 23.58 ± 2.23. Age range was 22 to 46 years. All participants were licensed drivers and reported that they drove regularly. Mean driving experience was 7.98 ± 6.29 years. Participants passed the minimum Italian driver’s licensing criteria for binocular visual acuity (10/10 [Decimal notation, equivalent to 20/20 in Snellen notation from a distance of 20 ft, and 0 in LogMAR notation] overall with no less than 2 diopters in the weaker eye) (Italian Highway Code, 1992). Participants were given a full explanation of the experimental protocols, and informed consent was obtained, with the option to withdraw from the study at any time. This research complied with the American Psychological Association Code of Ethics and tenets of the Declaration of Helsinki and was approved by the Ethics Committees of the University of Bologna.
Road and experimental vehicle
The experimental route was a 750-m straight segment belonging to a tertiary suburban road. Road width was 5.5 m and was a single carriage way with one lane for each direction and no shoulders. The road was not illuminated, and the experiment was run under nighttime conditions in complete darkness (9–12 p.m.). Experimental sessions were conducted with a dry road surface without rain and with optimal atmospheric visibility and lasted approximately 25 minutes for each participant. Mean speed was 44.7 km/h. Thanks to a collaboration with the local police authorities, the road was closed to external traffic to avoid the disturbing effect of opposing car lights. The experimental vehicle was a Mercedes Class A150 that had been serviced for headlight positioning alignment. Halogen lamps were used. A low beam headlight condition was employed in all sessions.
Bicycle conditions
A mountain bike was used as test bicycle. The bicycle was equipped with a rear carrier. Four conditions were compared: (a) rear red reflector, (b) high visibility jacket, (c) ECE/ONU 140 reflective tape, and (d) control condition without any light or reflective equipment.
The rigid prismatic rear red reflector was 11.5 cm wide and 4.5 cm high (reflecting area: 51.75 cm2) and was positioned on the tail of the bicycle carrier (Figure 1). In the second condition, an orange high visibility jacket was used. The jacket was made of an orange fluorescent fabric and included two horizontal reflective bands, 50 × 5 cm each, for a total reflecting area of 500 cm2. It conformed to EN471 Class 2 norm.
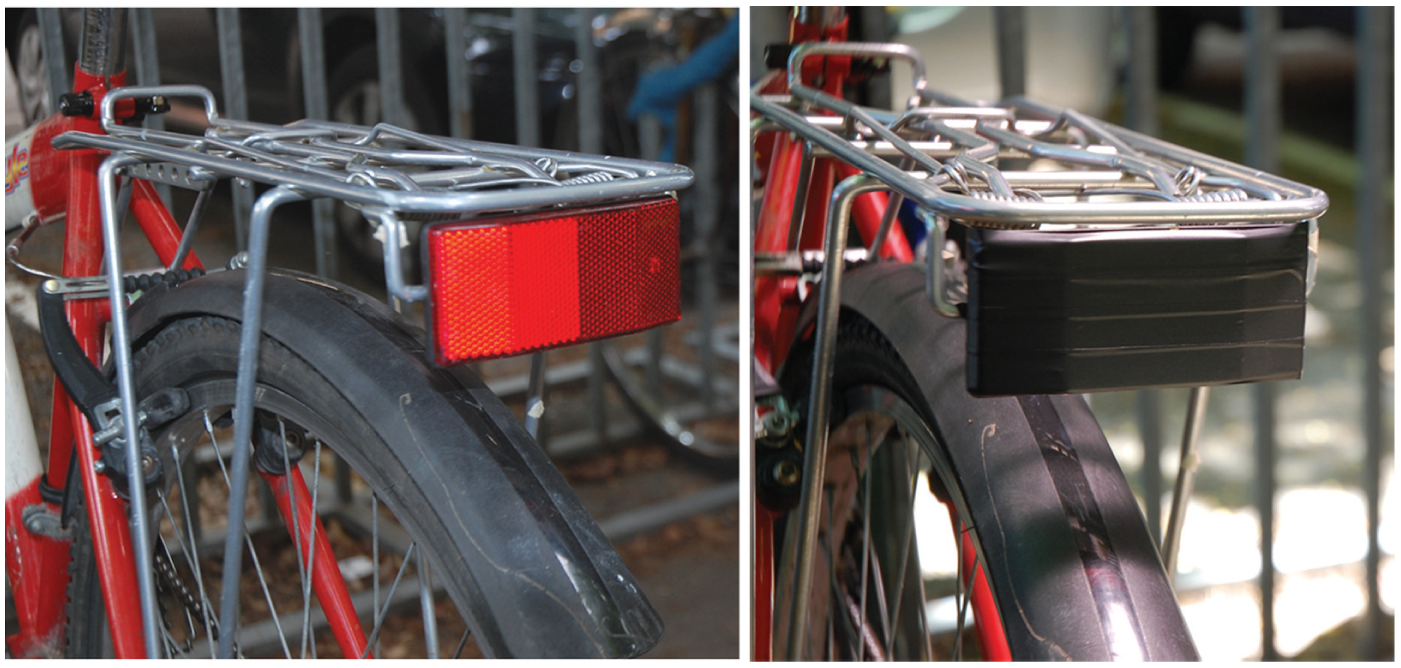
(Left) Red prismatic red reflector used in Studies 1 and 2. (Right) Masked rear reflector in the control condition.
In the third condition, the 3M Diamond 983 white reflective tape was used. This tape is a highly reflective microprismatic marking designed to mark the sides and rear of vehicles for enhanced visibility and detection. The tape complies to ECE/ONU 104 standards. The reflective marking consists of prismatic lenses that are formed in a transparent, synthetic resin, sealed and backed with a pressure-sensitive adhesive and clear poly liner. The 3M Diamond 983 coefficient of retroreflection is 800, 550, 345 cd/lux/m2 for, respectively, an entrance angle of −4°, 30°, 45°, considering an observation angle of 0.2°. Four markings were used: two 42 × 2.5 cm strips on both the left and right forks (shaped to the round profile of the forks) (Figure 2, left), one 15 × 2.5 cm strip on the bicycle seat post (rounded profile) (Figure 2, middle), and one that covered the standard rear reflector (11.5 × 4.5 cm) (Figure 2, right), for a total covering area of 299.25 cm2.

ECE/ONU 104 reflective tape applied to (left) left and right posterior forks, (middle) seat post, and (right) rear reflector.
In all conditions, the yellow pedal reflectors were covered with black adhesive tape (shown in Figure 5 later in the article). In the control condition, the rear reflector was covered with black adhesive tape (Figure 1), and no reflective tape was applied to the frame. The test cyclist was dressed with a dark gray tracksuit. To minimize the effect of perception-based learning, the order of the different conditions was randomized for each participant. As a control of the randomization procedure, detection distance for the first exposure to the bicyclist was compared to subsequent exposures with an ANOVA that was not significant: F(1, 12) = .82, p = .38.
The bicycle was equipped with anterior and posterior cantilever brakes. In order to evaluate braking distance, we have performed a test with the same bicycle used for the four studies. The bicycle was equipped with the VBox system, a high accuracy system that records speed and acceleration with a sample rate of 20 Hz. Braking distance was assessed by the speed profile as a function of distance. Thirty braking tests were included in the analysis. Bicyclist speed ranged from 7 to 12 km/h. Mean braking distance was 1.51 (±.32) m.
Procedure and Data Analysis
The experimental vehicle was equipped with a Racelogic VBox in order to record dynamic and position data (speed, GPS coordinates, and acceleration). The Racelogic VBox system consisted of two cameras placed on the left and right frontal car roof that recorded the driver visual scene, an integrated microphone that recorded all the audio streaming inside the vehicle, a GPS antenna in the car roof, in central position, and an accelerometer with 1% accuracy. The system uses the velocity parameter derived from Doppler measurements to compute distances, with an accuracy of 0.05%. Update rate was 20 Hz for position, velocity, and acceleration data, and 25 Hz for the video recording (resolution 720 × 576). The reliability of this system has already been tested in studies that assessed driver’s perception (Costa et al., 2014; Lantieri et al., 2015).
Each participant completed five laps of the experimental route, one practice lap and four data collection laps. The purpose of the first lap was to familiarize the driver with both the experimental vehicle and the route. Each driver started at the beginning of the straight road segment while the test bicyclist started between 400 and 500 m away in order to avoid the car driver meeting the bicyclist exactly at the same position. The driver could drive for some hundred meters before detecting the test bicyclist. The bicyclist was instructed to proceed along the right margin of the road, as in a standard bicycle drive condition, with a speed ranging from 7 to 12 km/h. The bicycle was equipped with a digital speedometer connected to the anterior wheel. The car driver was instructed to follow the specified route, drive at a comfortable speed, and pronounce “obstacle” when he or she detected the presence of an obstacle on the carriageway. A walkie-talkie operated by a research assistant inside the vehicle was in constant communication with a walkie-talkie held by the test bicyclist, who was instructed to stop immediately when hearing “obstacle,” operating simultaneously the anterior and posterior brakes to minimize braking distance. All vocal output from the participant and the research assistant was recorded by the Vbox equipment and synchronized with velocity and positioning data.
After having targeted the obstacle, the experimental vehicle approached the bicyclist and stopped exactly by his side. In this exact position, the research assistant pronounced “bicyclist position” so that this localization was recorded on the VBox system. Detection distance was computed subtracting bicyclist position with obstacle position.
Results
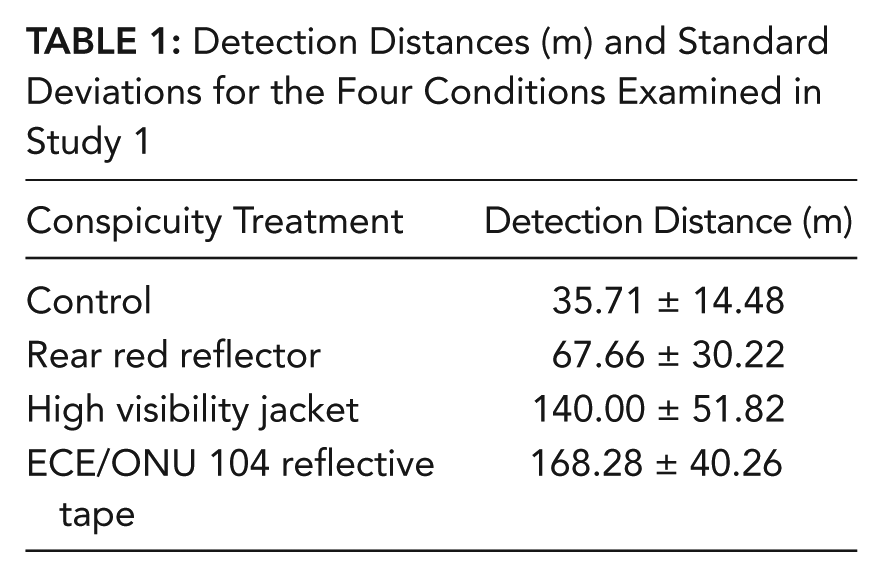
An ANOVA tested detection distance between the four treatment conditions. Main effect for conspicuity treatment was significant: F(3, 31) = 23.74, p
Detection Distances (m) and Standard Deviations for the Four Conditions Examined in Study 1

Mean detection distances (m) and standard errors for the four conspicuity treatment conditions of Study 1.
Tukey’s honestly significant difference (HSD) applied on conspicuity treatment revealed that the difference between ECE/ONU 104 reflective tape and the high visibility jacket was not significant (p = .50). High visibility jacket (p < .001) and ECE/ONU 104 reflective tape (p < .001) detection distances were significantly higher than the control condition and from the rear reflector condition (respectively, p
A linear regression tested the influence of participant’s age on detection distance. The model was not significant (p = .77).
Discussion Study 1
In this study, we tested conspicuity benefits of reflective markings applied to the rear bicycle frame (rear forks, seat post, rear reflector). The reflective tape was compared to a red rear reflector and a high visibility jacket. The ECE/ONU 104 reflective tape resulted in a bicyclist detection of 168.2 m, which was comparable to the effect of a high visibility jacket (140 m).
In comparison to the control condition, the ECE/ONU 104 reflective marking resulted in an improvement by a factor of 4.7. The high visibility jacket determined an improvement by a factor of 3.9, while the standard red rear reflector did not significantly enhance detection in comparison to the control condition.
The rear red reflector detection distance was referred to a reflective surface of 51.75 cm2, which is double than that of standard reflectors, which have an average surface of 25 cm2. Nevertheless, the detection distance was only 67.66 m and was not significantly different from the control condition.
In Study 2, the same four conditions of Study 1 were compared with street lighting on and off. The aim was to test how reflective tape could improve conspicuity in night conditions with streets lit.
A second aim was to complement the detection distance with a measure of recognition distance. The detection distance was the distance at which the driver could perceive the presence of an obstacle on the carriageway. This condition can be considered as an absolute threshold task. The only information at this stage was a visual spot on the carriageway that was categorized as an obstacle. It was the only distance assessed in Study 1. Detection distance is the most critical in order to prime the driver’s attention.
The recognition distance was the distance at which the driver could identify the obstacle as a cyclist. The amount of visual information and details gathered by the driver in this second task was considerably higher than in the detection condition. Between detection and recognition distance, the driver did not perceive the bicycle and bicyclist as a complete and meaningful Gestalt. In Study 2, for all conditions, we asked each driver to indicate both the exact time in which an obstacle was perceived (detection distance) and the exact time in which the obstacle was identified as a bicyclist (recognition distance).
Study 2
Method
Participants
The sample was composed of 11 participants, 10 males and 1 female. The mean age for males was 31.19 ± 9.71 years, while the female was 38 years old. Age range was 23 to 46 years. All participants were licensed drivers and reported that they drove regularly. Mean driving experience was 11.42 ± 10.09 years. Participants passed the minimum Italian driver’s licensing criteria for binocular visual acuity (10/10 overall with no less than 2 diopters in the weaker eye) (Italian Highway Code, 1992). Participants were given a full explanation of the experimental protocols, and informed consent was obtained, with the option to withdraw from the study at any time. This research complied with the American Psychological Association Code of Ethics and tenets of the Declaration of Helsinki and was approved by the Ethics Committees of the University of Bologna.
Road and experimental vehicle
The experimental route was a straight road segment 700 m long. Road width was 7.5 m. The road was a single carriageway with one lane for each direction. The road had no shoulders. On the right and left margins, there was 1.5 m wide sidewalk. A roundabout at the end of the road allowed the return to starting point. The study was conducted in two conditions: with street lighting on (5.5–7.7 lux at the road pavement level) and street lighting off (0 lux), thanks to a collaboration with the local urban authority. The experiment was run under nighttime conditions (9–12 p.m.), with a dry road surface without any precipitations, and it lasted about 45 minutes for each participant. As the experimental route was located in an industrial area, the normal vehicular traffic was very low. The same experimental vehicle of Study 1 was used. Mean speed was 39.5 km/h in the street lighting off condition and 47.2 km/h in the street lighting on condition.
Bicycle conditions
The same four conspicuity treatments of Study 1 were compared: (a) rear red reflector, (b) high visibility jacket, (c) ECE/ONU 140 reflective tape, and (d) control condition without any light or reflective equipment. The bicyclist wore dark clothing (dark gray tracksuit). The order of the four conditions and the order of the street light on/off condition were randomized for each participant. For five participants, the street lighting on condition was first, while for six participants, the street lighting off condition was first. As a control of the randomization procedure, detection distance for the first exposure to the bicyclist was compared to subsequent exposures with an ANOVA that resulted not significant: F(1, 9) = 2.69, p = .13. The same control was performed on recognition data, and the ANOVA was not significant: F(1, 9) = 1.41, p = .27.
Procedures
The procedure mirrored the one described for Study 1. The VBox equipment was used for collecting data about spatial positioning, speed, and acceleration, in synchrony with the video of the driver’s visual scene and audio streaming. Each participant completed nine laps, one practice lap and eight data collection laps (four with street illumination on and four with street illumination off). The purpose of the first lap was to familiarize the driver with both the test vehicle and the experimental route. Each lap started at the beginning of the straight route while the test bicyclist started between 400 and 500 m away.
In this study, both detection and recognition distances were assessed for each condition. The participant was instructed to follow the specified route, drive at a comfortable speed, and pronounce “obstacle” when he or she detected the presence of an obstacle on the carriageway. The VBox recorded the participant’s voice synchronized with the spatial data (localization, speed). The research assistant in the experimental vehicle was in continuous contact with the test bicyclist via walkie-talkie. When the test bicyclist heard “obstacle,” he was instructed to immediately stop. In order to reduce the bicyclist brake distance to a minimum, he was instructed to proceed at slow speed. The participant was invited to follow the route and to pronounce “bicyclist” when he or she recognized that the obstacle was a cyclist. After that, the experimental vehicle reached the bicyclist position and stopped exactly at its side. The research assistant pronounced “bicyclist position” to record the localization of the bicyclist. The participant ended the route and returned to the starting point.
Data Analysis
All detection and recognition distances were computed from the data collected with the Vbox equipment. Detection distance was computed as the difference between bicyclist position coordinates and the obstacle coordinates. Recognition distance was computed as the difference between bicyclist position coordinates and bicyclist coordinates.
Results
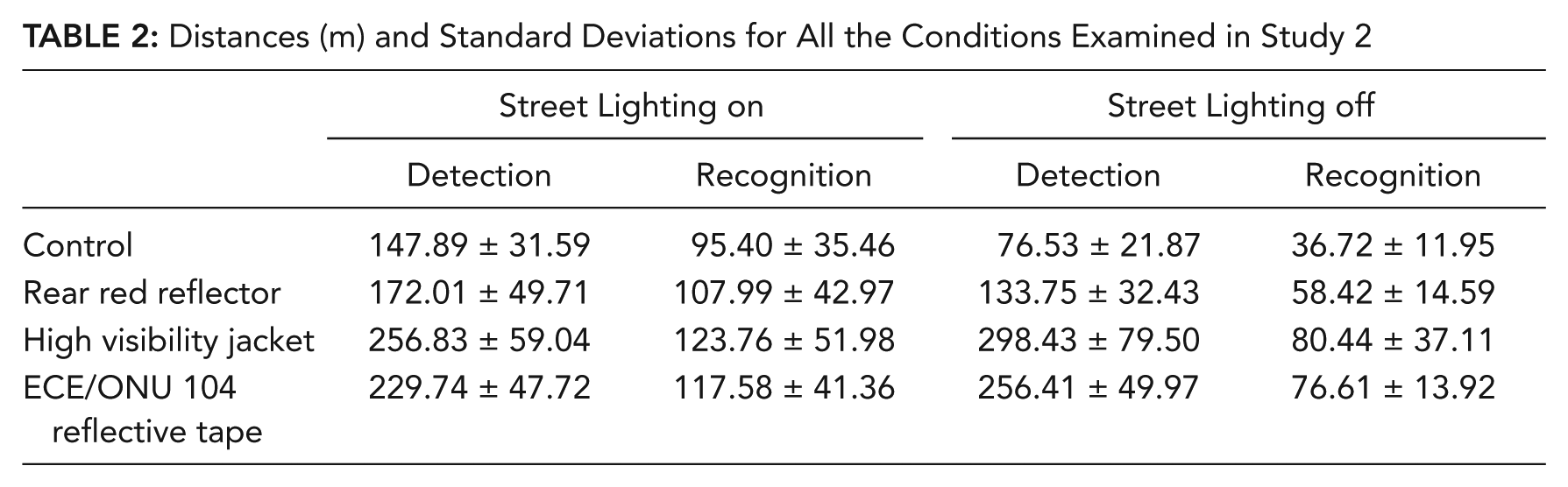
Mean distances and standard deviations for all the conditions are shown in Table 2. Detection and recognition distances with standard errors are shown in Figure 4.
Distances (m) and Standard Deviations for All the Conditions Examined in Study 2
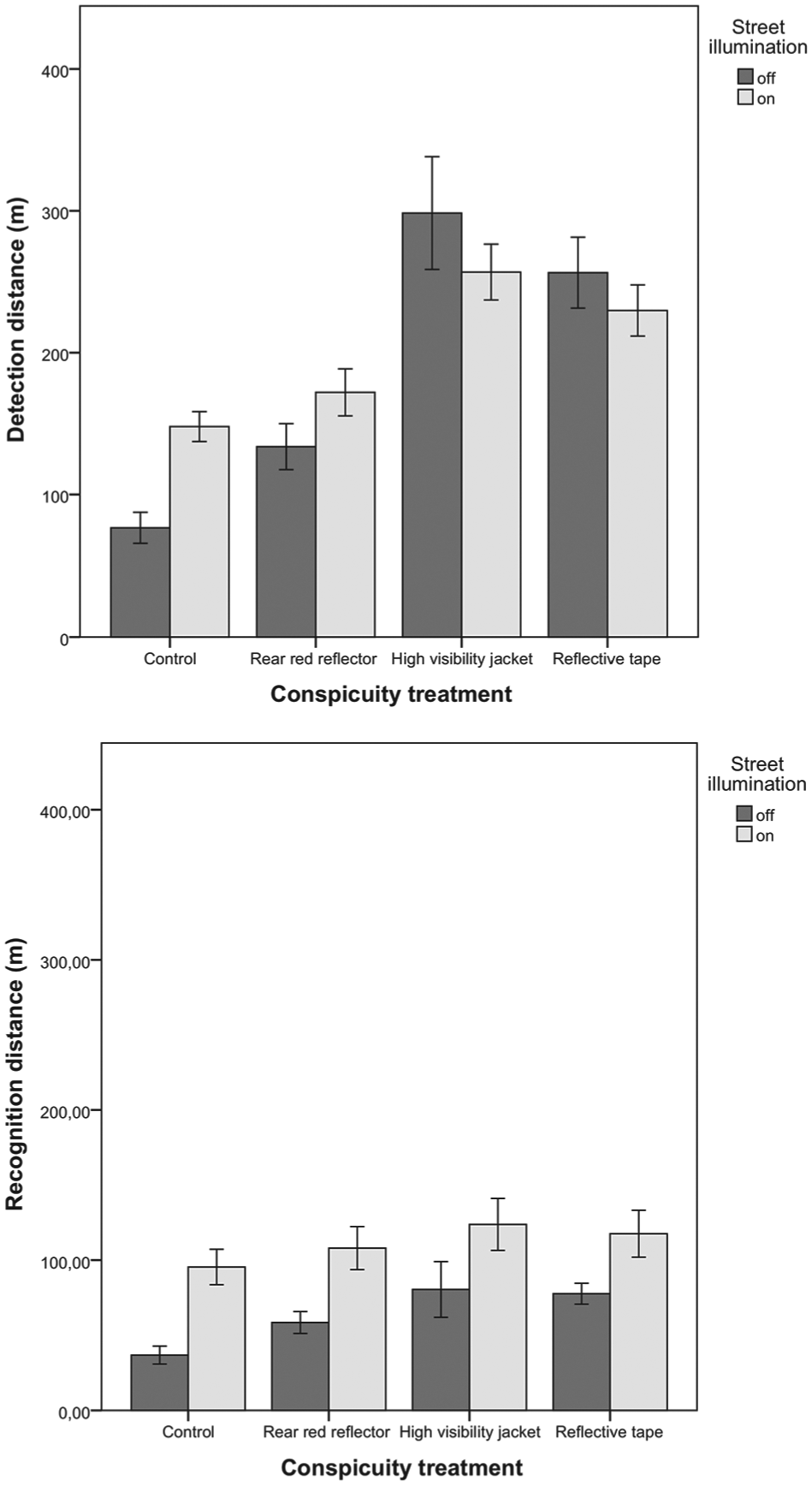
Detection and recognition distances (m), with standard error bars, for the four conspicuity treatment conditions of Study 2, as a function of street illumination.
Detection distance
The data were analyzed with a 2 × 4 ANOVA. Independent variables were street lighting (2 levels: on and off) and conspicuity treatment (four levels: control, red rear reflector, high-visibility jacket, ECE/ONU 104 reflective markings). The results showed a significant main effect for: conspicuity treatment: F(3, 50) = 28.01, p
Post hoc analysis showed a significant difference between control and high visibility jacket (p < .001) and control and reflective tape (p < .001). Comparisons between high visibility jacket and reflective tape and between control and rear red reflector were not significant. Rear red reflector detection distance was significantly lower than both the reflective tape condition (p = .001) and the high visibility jacket condition (p < .001) (Figure 4 up).
Recognition distance
The same ANOVA design for detection distance was applied. The results showed a significant main effect for street lighting: F(1, 50) = 18.40, p
A linear regression tested the effect of age on detection and recognition distances across all treatment conditions. The model was not significant for both detection (p < .31) and recognition (p < .12).
Discussion Study 2
As in Study 1, the reflective tape considerably improved conspicuity enhancement by a factor of 3.3 in comparison to the control condition with street lighting off. For recognition, the efficacy of reflective markings was an enhanced visibility by a factor of 2.08. In the case of the illuminated street, the ECE/ONU 104 reflective tape induced a conspicuity enhancement by a factor of 1.55. The presence of illuminated public street lighting reduced recognition distances in all conditions. For the high visibility jacket condition and the ECE/ONU 104 reflective marking condition, detection distance was higher when street lights were off. This is probably due to the fact that reflective materials are effective mainly in darkness, contrary to fluorescent materials, which are more effective during daytime or dusk.
Marking the bicycle frame with reflective tape is particularly useful for increasing the detection distance, which directly affects bicyclist safety at night. The consistent results about the positive effects of reflective tape clearly show its potential importance for diminishing car-bicyclist accidents at night.
The first two studies investigated bicycle perception in conditions of optimal visibility and with a dry road surface. Rain is the most adverse weather condition encountered by drivers (Olson, Dewar, & Farber, 2010). Perceptual difficulties in rain include reduced visibility distance, the effect of moisture on the windshield, distraction due to the action of the wipers, and glare from incoming headlights. All these effects can significantly reduce the ability of a driver to see the road ahead in darkness.
Although drivers tend to reduce speed in rain during daytime, at night, speed surprisingly increases (Daniel, Byun, & Chien, 2009). Road surface appearance can change dramatically in the rain because rainfall tends to fill in the voids in the road pavement, changing its optical properties from a diffuse reflector to a mirror-like specular reflector. When the surface acts as a specular reflector, light is not diffused but only reflected along a specific angle. Light that would normally be reflected back toward the driver, causing the road to appear brighter, is instead reflected forward. Immediately after the road becomes wet, the maximum luminance in front of the car drops to about 10% of the dry value. After 90 minutes, the maximum pavement luminance is only about one-third of the dry value (Olson et al., 2010).
In the third study, the aim was to investigate conspicuity enhancement induced by reflective tape in a condition of rainy weather and wet road surface. We compared the ECE/ONU 104 reflective tape applied to the rear bicycle frame to a control condition in which no conspicuity treatment was applied to the bicycle. The rear red reflector and the high visibility jacket conditions were not considered in Study 3 and 4.
Study 3
Method
Participants
The sample was composed of 17 participants. Nine females (mean age: 42.66 ± 9.73) and 8 males (mean age: 42.87 ± 17.58) entered in this study. Age range was 27 to 61 years. All participants were licensed drivers and reported that they drove regularly. Mean driving experience was 22.66 ± 14.56 years. Participants passed the minimum Italian driver’s licensing criteria for binocular visual acuity (10/10 overall with no less than 2 diopters in the weaker eye) (Italian Highway Code, 1992).
Participants were given a full explanation of the experimental protocols, and informed consent was obtained, with the option to withdraw from the study at any time. This research complied with the American Psychological Association Code of Ethics and tenets of the Declaration of Helsinki and was approved by the Ethics Committees of the University of Bologna.
Road and experimental vehicle
The experiment was run on the same experimental road used in Study 1. Public illumination was absent. The experiment was run under nighttime conditions (9–12 p.m.), with a wet road surface due to ongoing persistent mild rain, and it lasted approximately 20 minutes for each participant. Rain intensity was on average 1.2 mm/h, ranging from 0.8 mm/h to 1.4 mm/h, requesting the activation of windshield wipers. Mean speed was 42.3 km/h. The experimental vehicle and bicycle were the same used in Study 1.
Bicycle conditions
In this study, the comparison was between a control condition without any conspicuity equipment and an experimental condition with the test bicycle equipped with the ECE/ONU 104 reflective tape on the rear frame as in the previous two studies. Pedal reflectors were obscured with masking tape.
The bicyclist wore dark clothing (dark gray tracksuit and dark waterproof jacket). The order of the two conditions was counterbalanced between participants (eight participated in the control session first, and nine participated in the reflective tape condition first). As a control of the counterbalancing procedure, detection and recognition distance for the first exposure to the bicyclist was compared to the second exposure with an ANOVA that resulted not significant for both detection, F(1, 16) = .78, p = .39, and recognition, F(1, 16) = 1.34, p = .26.
Procedure and Data Analysis
The procedure mirrored the one described for Study 2. Each participant completed three laps, one practice lap and two data collection laps. Each lap started at the beginning of the straight route while the experimental bicyclist started between 400 and 500 m away. Both detection and recognition distances were assessed with the same methodology used in Study 2.
Results
The data were analyzed with a 2 × 2 ANOVA design. Independent variables were distance (2 levels: detection distance vs. recognition distance) and conspicuity treatment (2 levels: control, ECE/ONU 104 reflective marking). The results showed a significant main effect for distance (detection vs. recognition), F(1, 15) = 319.25, p
Mean distances and standard deviations for all the conditions are shown in Table 3. Figure 6a shows detection and recognition distances along with standard errors.
Distances (m) and Standard Deviations for All the Conditions Examined in Study 3 (Rainy Conditions)

Note. Two linear regressions tested the influence of age on detection and recognition distances (considering both the control and experimental conditions). The model was not significant for both detection (p < .47), and recognition (p < .25).
Discussion Study 3
Comparing the results of the first two studies with the third study, we could quantify the adverse effect of rain on visibility and bicyclist detection. When the ECE/ONU 104 reflective tape was applied, a decrease of 42.87% in detection distance and of 18.14% in recognition distance was recorded. Nevertheless, also in rainy conditions, the reflective tape resulted in a significant enhancement of bicyclist conspicuity. The increase was by a factor of 1.86 for detection distance and by a factor of 2.17 for recognition distance.
In the first three studies, the conspicuity enhancement of retroreflective tape was studied under different conditions with the tape always being applied to the bicycle rear frame. Although the frame is moving in the driver’s visual scene during bicycle motion, when seen from behind by the driver, especially at distance, it is almost stationary, with mainly weak lateral oscillations. Since motion information could significantly enhance conspicuity and promote visual detection in Study 4, we assessed bicycle detection and recognition placing the reflective tape in pedal cranks. Pedal cranks motion is faster than that of the lateral frame oscillations when viewed from behind, and this could favor bicyclist detection. The study was conducted in normal weather without rain, mirroring the conditions of the first two studies.
Study 4
Method
Participants
The sample was composed of 15 participants. Seven females (mean age: 49.57 ± 3.13) and 8 males (mean age: 52.62 ± 11.01) entered in this study. Age range was 21 to 64 years. All participants were licensed drivers and reported that they drove regularly. Mean driving experience was 32.46 ± 9.11 years. Participants passed the minimum Italian driver’s licensing criteria for binocular visual acuity. Participants were given a full explanation of the experimental protocols, and informed consent was obtained, with the option to withdraw from the study at any time. This research complied with the American Psychological Association Code of Ethics and tenets of the Declaration of Helsinki and was approved by the Ethics Committees of the University of Bologna.
Road and experimental vehicle
The same experimental route of Study 1 was used. Public illumination was absent. The experiment was run under nighttime conditions (9–12 p.m.), with a dry road surface, and it lasted about 20 minutes for each participant. Mean speed was 44.5 km/h. The experimental vehicle and bicycle were kept equal to the previous three studies.
Bicycle conditions
In this study, the comparison was between a control condition without any conspicuity equipment and an experimental condition with the experimental bicycle equipped with ECE/ONU 104 reflective markings on the pedal cranks (Figure 5). Pedal reflectors were obscured with masking tape. The reflective strips were 20 cm high and were applied to all four sides (2 × 1 × 2 × 1 cm) of both cranks. The visible portion of reflective strips was 20 cm2 for each crank when the pedal was vertical. During the pedal rotation, the visible part was progressively less, reaching zero in the horizontal position. The bicyclist wore dark clothing (dark gray tracksuit). The order of the two conditions was counterbalanced between participants (control condition was first for 7 participants and second for 8 participants). As a control of the counterbalancing procedure, detection and recognition distance for the first exposure to the bicyclist was compared to the second exposure with an ANOVA that resulted not significant for both detection, F(1, 14) = .90, p = .77, and recognition, F(1, 14) = .26, p = .62.

ECE/ONU 104 reflective tape applied to pedal crank. The yellow reflectors on pedals were masked with black tape in all conditions.
Procedure and Data Analysis
The procedure and data analysis mirrored those described for Studies 2 and 3 with the assessment of both detection and recognition distances.
Results
The data were analyzed with a 2 × 2 ANOVA. Independent variables were distance (2 levels: detection and recognition) and conspicuity treatment (2 levels: control and ECE/ONU 104 reflective tape). The results showed a significant main effect for distance: F(1, 13) = 492.76 p
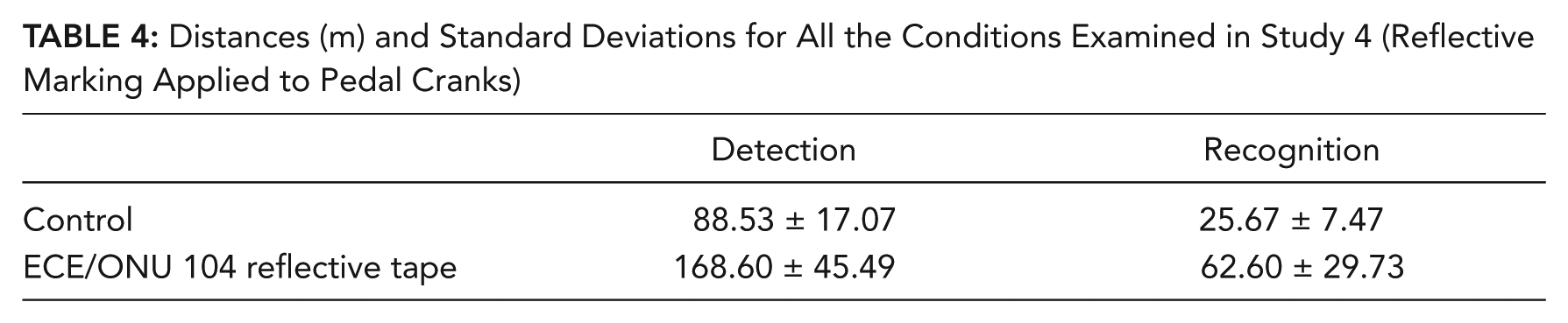
Mean distances and standard deviations for all the conditions are shown in Table 4. Figure 6b shows detection and recognition distances with standard errors.
Distances (m) and Standard Deviations for All the Conditions Examined in Study 4 (Reflective Marking Applied to Pedal Cranks)
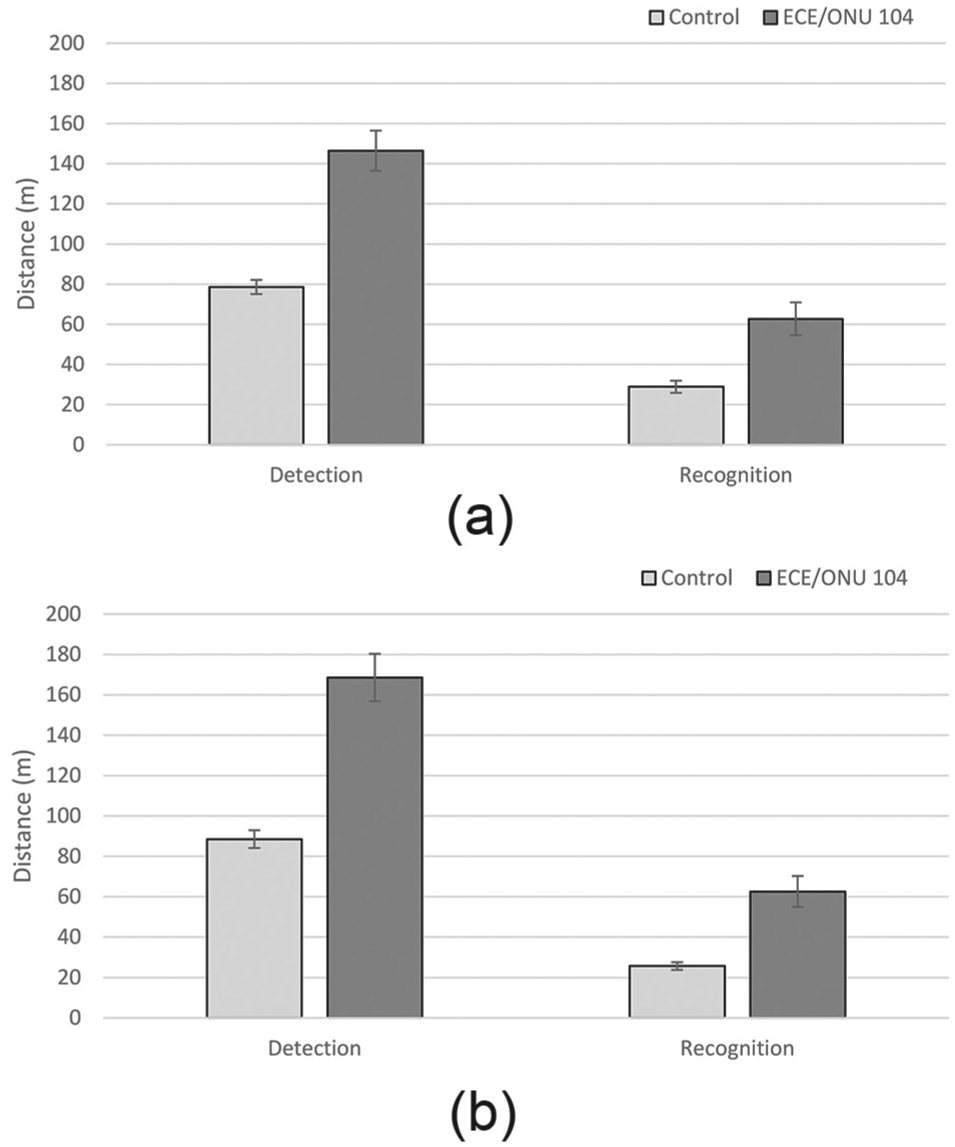
Detection distances (m), with standard error bars, for (a) Study 3 and (b) Study 4.
Detection distance was compared between the four studies with a univariate ANOVA. For Study 2, we only included the street light off condition to allow a comparison with the other three studies. The ANOVA resulted significant, F(3, 40) = 7.95, p < .001,
Recognition distance was compared between Studies 2, 3, and 4 with a univariate ANOVA that was not significant (p = .60).
General Discussion
Retroreflective films play an important role in traffic security and accident prevention. They are currently mainly employed for conspicuity enhancement in traffic signs and for marking the rear and sides of heavy tractors and trailers. For this specific use, the reflective film has to comply with ECE/ONU 104 regulations, and its introduction was strongly positive in terms of crash reductions. Sullivan and Flannagan (2012) assessing the odds of fatal collisions involving heavy trucks in darkness found a decline of 58% when reflective markings were applied. The results that we have obtained for the 3M Diamond 983 can be extended also to reflective tapes of other brands that comply to ECE/ONU 104 regulation.
It can be suggested that the same accident prevention recorded with the use of reflective markings in heavy trucks could also be found when applied to bicycles. Many types of circulating bicycles, especially mountain and sporting bikes, are not equipped with any reflective or lighting equipment, making their use at night particularly dangerous.
The aim of our studies was to assess the possible contribution of reflective films applied to different parts of the bicycle frame for conspicuity enhancement of the bicyclist at night. Previous studies (Wood et al., 2014, 2012) have investigated the positive effects of reflective materials applied to the bicyclist, an aspect that requires an active behavior by the bicyclist who has to remember to take and to wear the reflective clothing.
ECE/ONU 104 reflective tape is available in white, yellow, and red color. The color has consequences on the reflectivity level. According to the technical specification, the coefficient of retroreflection is maximum for the white film and a little lower for the yellow and red versions. Future studies could precisely assess conspicuity enhancement for the yellow and red reflective tape, comparing the results with those reported in this paper obtained with the white film. Since rear lighting is conventionally red, the use of red reflective tape could facilitate the recognition of a vehicle on the carriageway. The use of white reflective tape could generate doubts about the nature of the obstacle that the driver detects.
The third study has shown that in rainy conditions with poor visibility, the reflective tape results in a detection conspicuity enhancement by a factor of 1.86, which is exceedingly positive.
In the fourth study, the combined effect of reflective material and movement through the application of the reflective strips to the pedal cranks was examined. The results in terms of enhanced conspicuity were comparable to the condition in which the reflective markings were applied to the rear frame, although the total reflecting area was considerably lower. A problem connected to the application of the reflective tape to the pedal cranks is that it is totally visible only when pedal cranks were vertical. The visibility became progressively lower in the transition from vertical to horizontal position. The cranks’ lower position could posit problems for the reflective material duration due to the higher probability of being damaged by water, mud, or the friction with the bicyclist’s shoes. In this position, it is also higher the probability that the reflective marking could be concealed by the bicyclist pants.
All the studies have shown that the use of reflective tape was particularly positive for the detection distance in comparison to the recognition distance. The identification of the obstacle as a bicyclist is a perceptual and cognitive process that is not much facilitated by the adoption of reflective material, which is much more salient in increasing the distance at which the driver identifies the presence of an obstacle on the carriageway. The extremely positive results obtained for detection distances in our studies could be directly applied to the prevention of bicycle accidents.
A limitation of the studies was that the car driver knew in advance that at some point along the route he or she would have met a bicyclist. This factor, in conjunction with the awareness of participating to an experiment on bicyclist visibility, could have resulted in an overestimation of detection and recognition distances. It can be suggested that both distances are inversely related to the estimated probability of meeting bicyclists along a road. When the bicyclist is not expected, detection and recognition distances could be significantly lower. Despite this limitation, the critical focus of our studies was the comparison between the different conspicuity treatment conditions, and the state of hypervigilance was constant across the different studies and conditions.
The mean age in Studies 3 and 4 was higher than in Studies 1 and 2. In every study, the linear regression between age and detection and recognition distances lead to nonsignificant results, showing that age, at least in the ranges considered in our studies, was not a critical variable in determining visibility distance.
The advantage of applying the reflective tape directly to the bicycle frame is that it is a complete passive safety measure that does not require any active behavior by the bicyclist. Applying reflective tape directly to the frame, the bicycle becomes intrinsically more visible and therefore safer. Technical specifications declare eight years of durability in an external environment. Another advantage is the extreme low cost of adhesive reflective strips. Future advances could include the development and use of reflective coatings by bicycle manufacturers or the application of reflective sprays to bicycles that are not already coated with reflective material. Given the thin layer of coating, it should be assessed to what extent reflective material embedded in coating could be effective in enhancing bicycle conspicuity.
A widespread use of reflective material in bicycle manufacturing could lead to a significant reduction of car-bicycle crashes. The extensive use of reflective materials could also be extended to bicycle accessories such as helmets.
Although our results are very promising in terms of detection distances, reflective materials are not intended as alternative to lighting equipment but as complementary to front and rear lights that remain fundamental for bicycle safety at night.
Key points
ECE/ONU 104 reflective markings applied to the rear bicycle frame strongly increase bicyclist conspicuity at night.
ECE/ONU 104 reflective markings are effective both in total darkness, when street lights are on, and in rainy conditions.
The application of reflective markings to pedal cranks can add the advantage of motion for lowering detection threshold.
Reflective markings can be applied as a complement of bicycle lights and not as a substitute.
Footnotes
Marco Costa is an associate professor at the Department of Psychology, University of Bologna, Italy, and director of the Environmental Psychology Lab. He received a PhD in psychology from the University of Bologna (2000), and a master’s degree in experimental psychology from the University of Padua (1996), Italy. He is head of the master course in applied cognitive psychology at the University of Bologna.
Leonardo Bonetti received a master’s degree in applied cognitive psychology from the University of Bologna in 2016. He collaborates with Marco Costa at the Department of Psychology of the University of Bologna in doing research on traffic psychology.
Manuela Bellelli received a master’s degree in applied cognitive psychology from the University of Padua, Italy, in 2015. She trained for traffic psychology at the Catholic University, Milan, Italy, from 2013 to 2015.
Claudio Lantieri is a researcher in the Department of Civil, Chemical, Environmental and Material Engineering at the University of Bologna, Italy. He received a PhD in civil engineering in 2010 and a master’s degree in civil engineering in 2006 from the University of Bologna.
Valeria Vignali is a researcher in the Department of Civil, Chemical, Environmental and Material Engineering at the University of Bologna, Italy. She received a PhD in civil engineering from the University of Bologna in 2006 and a master’s degree in civil engineering from the University of Bologna in 2002.
Andrea Simone is an associate professor in the Department of Civil, Chemical, Environmental and Material Engineering at the University of Bologna, Italy. He received a PhD in civil engineering in 1999, and a master’s degree in civil engineering from the University of Bologna in 1995.