
Abstract
Objective
We examined the contribution of binocular vision and experience to performance on a simulated helicopter flight task.
Background
Although there is a long history of research on the role of binocular vision and stereopsis in aviation, there is no consensus on its operational relevance. This work addresses this using a naturalistic task in a virtual environment.
Method
Four high-resolution stereoscopic terrain types were viewed monocularly and binocularly. In separate experiments, we evaluated performance of undergraduate students and military aircrew on a simulated low hover altitude judgment task. Observers were asked to judge the distance between a virtual helicopter skid and the ground plane.
Results
Our results show that for both groups, altitude judgments are more accurate in the binocular viewing condition than in the monocular condition. However, in the monocular condition, aircrew were more accurate than undergraduate observers in estimating height of the skid above the ground.
Conclusion
At simulated altitudes of 5 ft (1.5 m) or less, binocular vision provides a significant advantage for estimation of the depth separation between the landing skid and the ground, regardless of relevant operational experience. However, when binocular cues are unavailable aircrew outperform undergraduate observers, a result that likely reflects the impact of training on the ability to interpret monocular depth cues.
Introduction
People rely on monocular and binocular information to judge the distance to objects and the relative separation of objects in depth. In static imagery, monocular cues such as perspective, size, shading, and occlusion can signal ordinal depth relationships. Depth magnitude can also be inferred from monocular cues. For instance, the known size of objects could provide information regarding their absolute distance. The addition of binocular cues has been shown to improve the accuracy of depth judgments. This is largely due to the combination of stereopsis (based on the disparity between each eye’s retinal image) and knowledge of viewing distance (inferred from vergence eye movements or vertical disparity patterns; Howard, 2012). Binocular distance estimation is most accurate at short viewing distances (Blakemore, 1970; Foley, 1985; Foley & Richards, 1972; Gogel, 1977; Rogers & Bradshaw, 1993; Wallach & Zuckerman, 1963), so it is not surprising that perceived depth magnitude is most accurate within near space. However, stereopsis can support reliable depth estimation at viewing distances much greater than 6.6 ft or 2 m (Allison, Gillam, & Vecellio, 2009; Palmisano, Gillam, Govan, Allison, & Harris, 2010). How effectively monocular and binocular depth cues are used varies with the viewing scenario. It is important to understand how and when these depth cues are exploited as this information could inform training for tasks that rely on depth perception.
Although the contribution of stereopsis to vision-based flight tasks is a long-standing concern in aviation (Howard, 1919; Wilmer, 1919), there is little consensus concerning its impact on operational performance. Surveys of accident reports, case studies of pilots, and controlled landing experiments have arrived at different conclusions regarding the importance of stereopsis to aircrew (for review, see Winterbottom et al., 2014; Wright, Gooch, & Hadley, 2013). For instance, the relative depth information provided by stereopsis may improve performance for operations that involve formation flying, aerial refueling, and helicopter landing scenarios (Acromite, 1999; Karlsberg, Karlsberg, & Rubin, 1971). Studies that compare binocular to monocular performance report that pilots can perform successful landings using monocular depth cues alone, but they do so using risky maneuvers (see Grosslight, Fletcher, Masterton, & Hagen, 1978; Jongbloed, 1935; Lewis & Krier, 1969; Pfaffmann, 1948). Interestingly, accident reports show that mishaps partially attributed to poor stereopsis are often compounded by poor visibility (Wright et al., 2013), which can eliminate or reduce the availability of monocular cues.
Simulation studies permit the evaluation of tasks relevant to aviation with experimental control and ecological validity. Recent studies have used virtual environments to evaluate the contribution of stereopsis to specific flight tasks. For example, Lloyd and Nigus (2012) used a stereoscopic aerial refueling simulation to show that observers were more accurate when estimating relative distance with stereopsis, compared with performance without stereopsis. Others have shown improvements in similar tasks that correlate with stereoscopic acuity (Winterbottom, Lloyd, Gaska, Wright, & Hadley, 2016). We showed previously that the presence of stereopsis improved the accuracy of altitude judgments for simulated imagery depicting a low hover flight operation (Deas et al., 2017). Undergraduate observers estimated the altitude of a virtual helicopter skid relative to the simulated ground plane in several terrain conditions under monocular and binocular viewing. Our results demonstrated that when only monocular texture cues were available, observers greatly underestimated the altitude of the helicopter skid for all terrains. The advantage provided by binocular viewing was consistent across all types of simulated ground terrain, including terrains devoid of useful monocular depth cues.
The aim of Deas et al. (2017) was to determine if, and to what extent, stereopsis benefits aviation tasks performed by rotary-wing aircrew. We found that when monocular texture cues and binocular disparity were available, observers showed accurate altitude judgments relative to theoretical predictions but substantially underestimated altitude when only monocular cues were present. However, observers in Deas et al.’s (2017) study were undergraduate students with no flight-related training or experience. It is possible that the task-specific training that rotary-wing aircrew receive could improve monocular altitude judgments, that is, when binocular depth cues are unavailable. For instance, flight engineers are trained to use size cues (e.g., average tree height or width of roadways) to make altitude judgments. Although this training could be expected to improve the utility of monocular cues, it is unclear how such benefits compare with estimates based on stereopsis alone or when monocular cues are unreliable or in conflict.
The aim of the current study was to determine whether the pattern of binocular and monocular performance in Deas et al. (2017) holds for rotary-wing aircrew. Using methods similar to Deas et al. (2017), we compared performance of a large sample of undergraduate observers with that of a group of military rotary-wing aircrew. We used a simulated low hover task in which observers judged the relative distance between a helicopter skid and the ground plane. To evaluate the contribution of stereopsis with and without monocular depth cues, the task was performed monocularly and binocularly using ground textures with varying amounts of detail. From our previous study, we predict that both undergraduate observers and aircrew will perform well when binocular cues were available, particularly in the terrains supporting multiscale texture. However, when binocular cues are absent, aircrew may be better able to capitalize on monocular cues than undergraduate observers and produce more accurate depth estimates in terrain conditions where the size scaling of texture is a viable depth cue.
Method
Observers
We recruited 30 undergraduate observers from York University, and 31 rotary-wing (helicopter) aircrew from the Canadian Department of National Defence. The military aircrew were members of the Royal Canadian Air Force (RCAF) and passed the RCAF’s rigorous selection process which includes tests of cognitive and psychomotor abilities, as well as physical and ophthalmological health. Of the 31 aircrew, 14 were flight engineers, whereas the remaining seventeen were pilots. Both occupations require that aircrew make altitude estimations and verbalizations based on visual cues (e.g., a call-to-landing scenario where an aircrew member makes verbal call-outs of successive altitudes until touchdown). Aircrew were in their occupational classification for an average of 13.0 years (SD = 8.3). Thus, as anticipated, aircrew differed from undergraduate observers according to training and experience but might also be expected to differ along other dimensions due to the selection criteria. Importantly, all observers had normal or corrected-to-normal vision and, if necessary, wore their corrective lenses during testing. Stereoacuity was assessed using the RandotTM stereoacuity test to ensure that observers could discriminate binocular disparities of at least 40 arc seconds. The research protocol used here was approved by the York University’s Research Ethics Board, the University of Waterloo’s Office of Research Ethics, and the Defence Research and Development Canada’s (DRDC’s) Human Research Ethics Committee, and the research adheres to the tenets of the Declaration of Helsinki.
Stimuli
Similar to Deas et al. (2017), our altitude esti-mation task used stereoscopic images that depict a low hover scenario with four terrain types. The images were rendered from the point of view of a seated individual looking down and to the left out of a helicopter door (rotation of 45° in pitch and yaw), past a virtual skid with a “real” extension, to the ground plane below. All stereoscopic images (3,840 × 2,160) were rendered in Autodesk MAYATM 2016. The field of view of the virtual camera matched the visual angle of the display at a viewing distance of 6.5 ft (2 m). The parallel stereoscopic camera configuration was set to an interaxial distance of 6 cm. Postrendering horizontal image translation converged all images at the point where the skid met the screen plane. This ensured that the skid appeared at the same location and distance from the observer in each test condition.
Samples of the four terrain types (grass, stones, runway, and grid) are reproduced in Figure 1. Terrains were texture mapped onto a flat ground plane. Grass and stone terrains were high resolution MAYA materials. The size, scale, and density of the texture varied with simulated altitude according to the projective geometry in MAYA. The runway terrain consisted of a uniformly textured black tarmac texture with a single yellow linear road marking. The width and position of the line was randomly jittered between trials to make it an unreliable cue for size-distance scaling. The mean width of the runway line was 1.18° with a range of 0.27° to 2.64°. Finally, the grid condition consisted of a quadripartite plane of alternating uniform dark and light regions that met in the center to form a cross. When the viewpoint of the camera was located midway between the eyes, this pattern was invariant to changes in altitude and provided no monocular cues to distance. When the skid was imaged on the ground plane (an altitude of zero), the disparity of the vertical line of the cross varied from 0° at the bottom to 0.42° at the top of the image. In all terrain conditions except the grid, the position of the ground terrain below the virtual helicopter skid was jittered, so the absolute position of specific texture markings were not informative distance cues. The helicopter skid remained in the same position on all trials. Each terrain was rendered at 31 test altitudes ranging from 0 to 5 ft (1.5 m) from the skid to the ground with a step size of 2 in. (5.1 cm).

Examples of the terrains used in the low hover altitude estimation task. Each image was rendered in Autodesk MAYATM 2016 at a simulated altitude of 5 ft or 1.5 m (from skid to ground). The terrains from left to right are the grass, stones, runway, and grid terrains, respectively. The same helicopter skid was visible in each image.
Apparatus
All images were presented on a LG 55in. 4K UHD Smart LED 3D TV (55LA9650) fixed on a custom-built mount with a slant of 45° relative to the ground and a rotation of 45° in yaw relative to the observer’s median plane. This ensured the screen plane of the display was perpendicular to the observer’s line of sight. The observer’s seated height was adjusted by raising or lowering the chair, so that the distance from the observer’s eyes to the center of the display was approximately 6.5 ft (2 m). At this distance, the screen subtended 31.5° of visual angle and one pixel subtended 0.01°. Images were presented using Stereoscopic Player (Wimmer, 2005) in over/under stereomode, which presented the right and left images in alternate rows of pixels aligned with the display’s film patterned retarder polarizer. Observers wore passive linearly polarized glasses to perceive stereoscopic images. A 4-ft-long (1.2 m) black plastic pipe was positioned such that it appeared to extend from the virtual skid to create a real-world reference. An illustration of the apparatus and seating arrangement is shown in Figure 2.

Illustration of the apparatus. Images were displayed on a 3D TV that was angled on a custom-built mount. The viewing geometry on the left shows an observer seated 6.5 ft (2 m) from the midpoint of the screen viewing a trial with an altitude of 6 in. (15.2 cm). The right image illustrates the polyvinyl chloride (PVC) pipe that extended from the screen that acted as a real-world reference to the virtual skid.
Procedure
To assess the impact of stereopsis on altitude judgments, we had observers verbally estimate the height of the skid above the ground. Observers assigned a value of their choosing to the distance from their head to the helicopter skid and made subsequent altitude estimates proportionally to this reference value. To do so, observers were shown a reference image of the skid on a uniform white background and asked to assign a numeric value (i.e., their modulus) to represent the distance between their head position and the skid. On each trial, observers were asked to use this modulus to estimate the distance between the skid and the simulated ground plane. For instance, if the modulus was “10” and the participant judged that the distance was twice as great, they would respond “20.” Each image was presented for 5 s, followed by a black response screen with a white fixation cross. Observers reported their judgments verbally to the experimenter.
Monocular and binocular trials were blocked for each observer and the order of blocks was counterbalanced between observers. In the monocular block, the observer’s left eye was covered with an eye patch worn under the polarized glasses, so only the right eye could view the display. Each block consisted of 124 trials (31 altitudes by 4 terrains) with one presentation of each altitude per condition. A large range of altitudes and a single judgment per altitude reduces biases inherent to magnitude estimation paradigms (Poulton, 1979). All testing took place in a darkened room.
Statistical Analysis
To evaluate the altitude judgments, each observer’s estimates were normalized by dividing their raw estimate by their modulus. Then, to compare normalized estimates to simulated altitude on a 1:1 scale, the normalized estimates were converted into inches using a simple linear conversion. The data were analyzed by fitting a linear mixed-effects model using the nlme package in R (Pinheiro, Bates, DebRoy, Sarkar, & Core Team, 2015). This model accounted for repeated-measure variables by using nested random effects arranged in a hierarchy. These variables modeled the correlation of the variance of the intercepts for each subject within each type of viewing condition and terrain. A likelihood ratio chi-square test determined the significance of fixed effects (terrain, viewing condition, observer group, and their interactions). Planned a priori comparisons for each fixed-effect were evaluated using t tests. An approximation of Pearson’s correlation coefficient (r) was used as a measure of effect size for each hypothesis test (Field, Miles, & Field, 2012). In the subsequent analysis, slope refers to estimated altitude as a function of simulated altitude in inches. Our analysis focused on the comparison of slopes in each terrain condition (grass, stones, runway, and grid) between the two viewing conditions (monocular and binocular) and two groups of observers (undergraduates and aircrew), analogous to multiple linear regression.
Results
A significant four-way interaction (slope as a function of terrain, viewing condition, and observer group), χ2(36) = 10.41, p = .02, showed the slope in each type of terrain and viewing scenario was different for undergraduates and aircrew. To evaluate the performance of each observer group in each terrain condition, the data were subdivided by terrain and a separate analysis was run for the grass, stones, grid, and runway terrains.
Grass and Stones Terrains
The slope of altitude estimates increased when binocular cues were available relative to monocular cues alone for both the grass terrain, b = 0.49, t(3,656) = 11.16, p < .0001, r = .18, and stones terrain, b = 0.47, t(3,656) = 12.61, p < .0001, r = .20. A significant three-way interaction between the slope, type of observer, and viewing condition in the grass terrain, b = −0.22, t(3,656) = −3.52, p < .001, r = .06, and Stone terrain, b = −0.16, t(3,656) = −2.94, p < .01, r = .05, indicated that the slope in each terrain depended on the type of observer and viewing condition. To understand this interaction for the grass and stones terrain conditions, the data were subdivided by viewing condition, and planned contrasts determined the difference in slope between the two groups of observers in the monocular and binocular viewing scenarios.
Figure 3 shows estimated altitude as a function of simulated altitude for undergraduates and aircrew for the grass terrain under monocular and binocular viewing. In the grass terrain condition, aircrew showed a significantly steeper slope than undergraduate observers when only monocular cues were available, b = 0.39, t(1,828) = 8.88, p < .0001, r = .20, and when both monocular and binocular depth cues were presented, b = 0.17, t(1,828) = 3.91, p = .0001, r = .09. The effect was smaller under binocular viewing relative to monocular viewing.
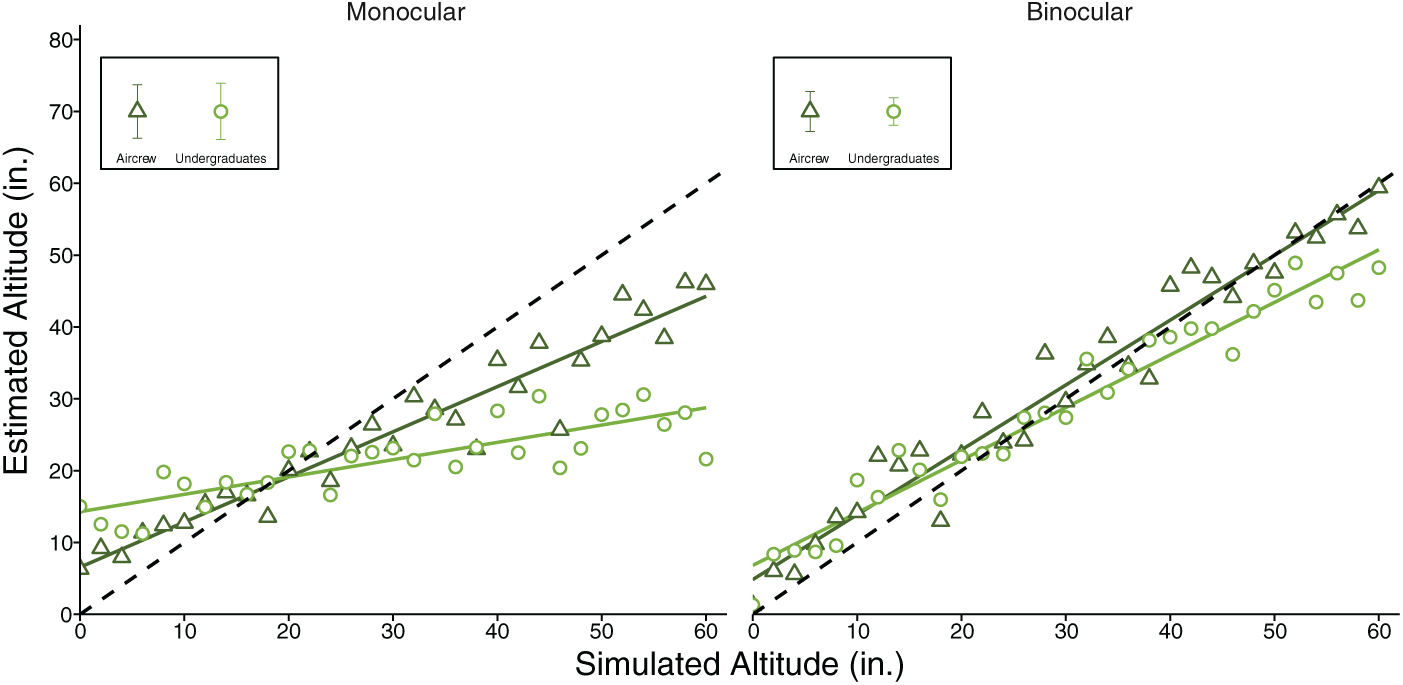
Mean altitude estimates for the grass terrain for each group of observers: undergraduates (circles) and aircrew (triangles), for the monocular and binocular viewing conditions. Solid lines represent the predicted fit, and the data points in the rectangle represent the standard error of the mean at a simulated altitude of 30 in. (76.2 cm). The dotted line represents geometric predictions.
Figure 4 shows the estimated altitude as a function of simulated altitude for undergraduate and aircrew for the stones terrain under monocular and binocular viewing. Consistent with the grass terrain, for the stones terrain aircrew showed a significantly steeper slope than undergraduate observers, b = 0.20, t(1,828) = 5.07, p < .0001, r = .12, when viewing the imagery monocularly. However, when binocular cues were available, there was no significant difference in slope between undergraduate observers and aircrew, b = 0.04, t(1,828) = 1.28, p = .20, r = .03.
Mean altitude estimates for the stones terrain for each group of observers: undergraduates (circles) and aircrew (triangles), for the monocular and binocular viewing conditions. Solid lines represent the predicted fit, and the data points in the rectangle represent the standard error of the mean at a simulated altitude of 30 in. (76.2 cm). The dotted line represents geometric predictions.
Grid Terrain
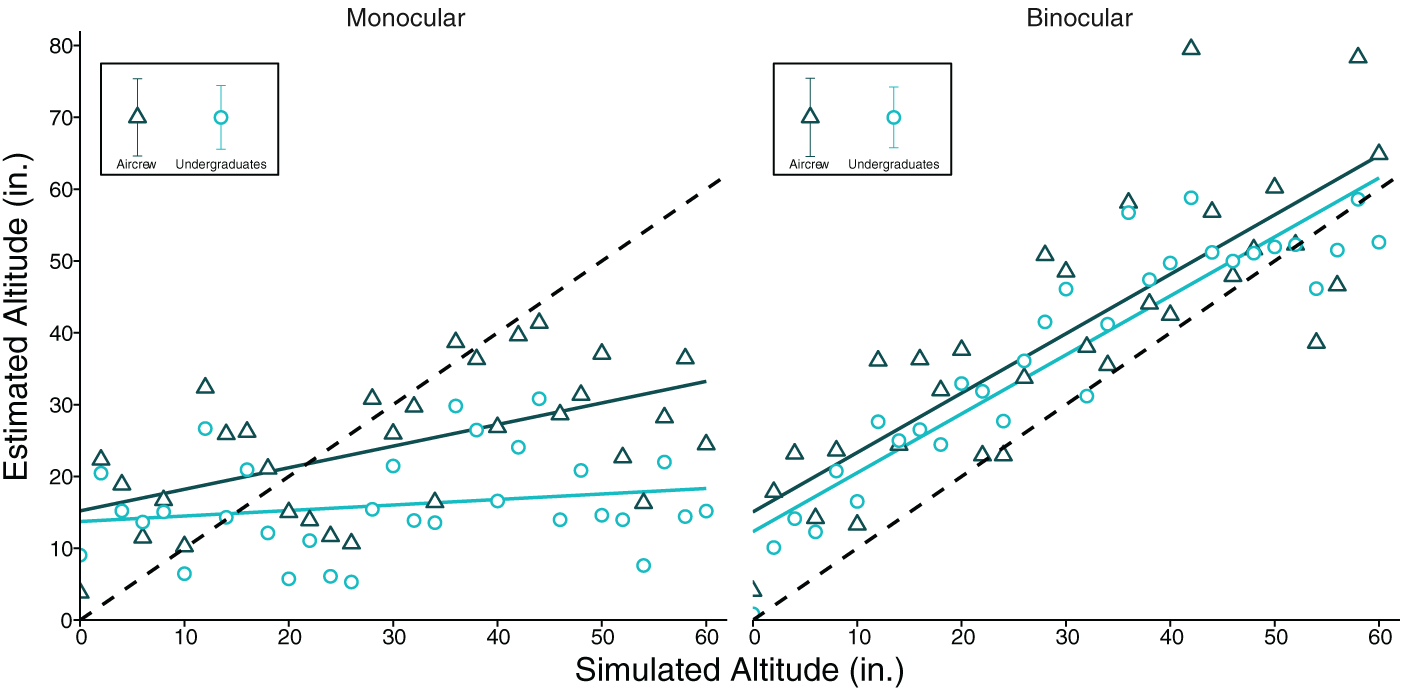
Figure 5 shows altitude estimates plotted as a function of simulated altitude for the grid terrain for undergraduates and aircrew for the monocular and binocular viewing conditions. Unlike the grass and stones terrains, there was no significant interaction between slope, type of observer, and viewing condition when viewing the grid terrain, b = 0.04, t(3,656) = 0.63, p = .53, r = .01. Thus, the difference in slope between the monocular and binocular viewing conditions did not depend on the type of observer. This was confirmed by the overall lack of significant difference in slope between the two groups of observers, b = 0.06, t(3,656) = 1.37, p = .17, r = .02. In other words, although the slope of the altitude estimates is significantly steeper when binocular cues are available relative to monocular cues alone, b = 0.42, t(3,656) = 9.49, p < .0001, r = .16, the benefit afforded by binocular viewing is the same for aircrew and undergraduate observers. The significantly steeper slope for the grid terrain under binocular relative to monocular viewing highlights the contribution of stereopsis to this task. As predicted, the absence of monocular depth cues in the grid terrain resulted in a slope that did not significantly deviate from zero when one eye was covered.

Mean altitude estimates for the grid terrain for each group of observers: undergraduates (circles) and aircrew (triangles), for the monocular and binocular viewing conditions. Solid lines represent the predicted fit, and the data points in the rectangle represent the standard error of the mean at a simulated altitude of 30 in. (76.2 cm). The dotted line represents geometric predictions.
Runway Terrain
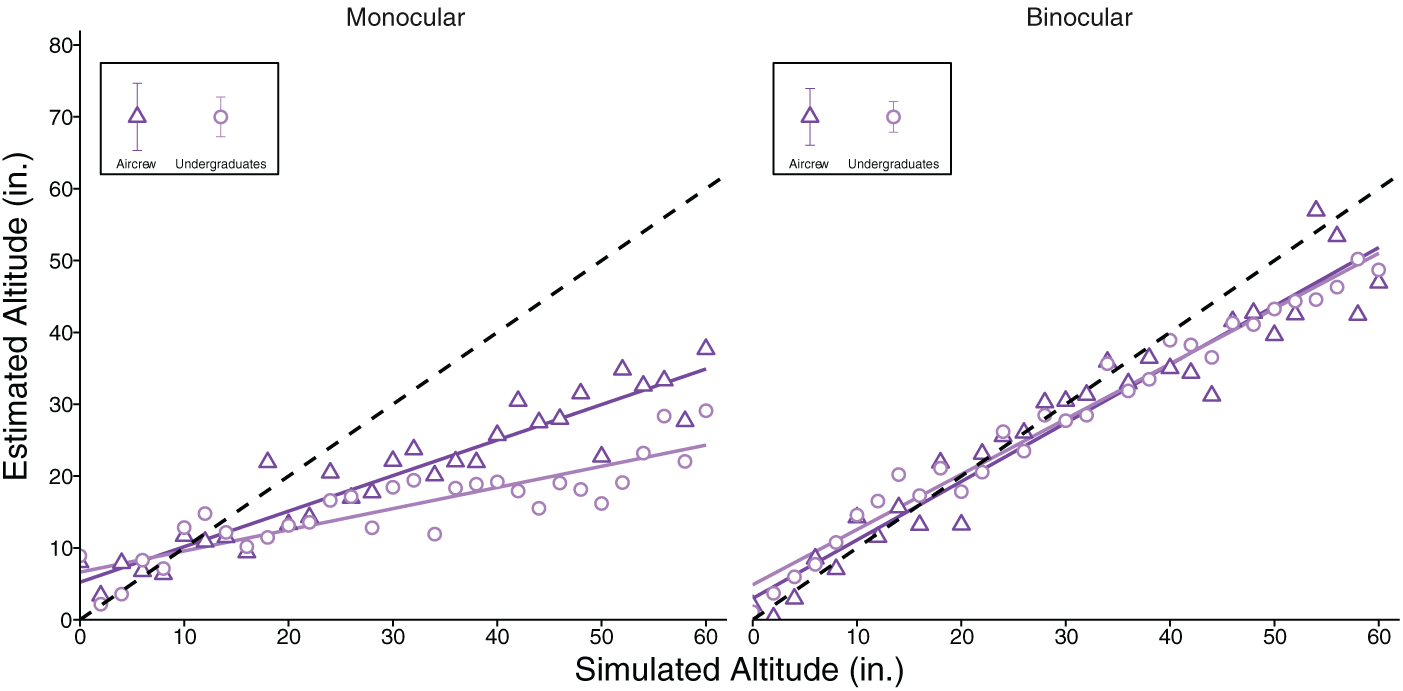
Figure 6 shows estimated altitude as a function of simulated altitude for undergraduates and aircrew for the runway terrain under binocular and monocular viewing conditions. A significant three-way interaction between the slope, type of observer, and viewing condition, b = −0.22, t(3,656) = −2.69, p = .01, r = .04, indicated that the difference in slope between the two groups of observers depended on the type of viewing condition. To understand this interaction, the data were subdivided by viewing condition and planned contrasts determined the difference in slope between undergraduates and aircrew in the monocular and binocular viewing conditions. Like the grass and stones terrain results, when only monocular cues were available, aircrew had a significantly steeper slope relative to undergraduate observers, b = 0.22, t(1,828) = 3.98, p = .0001, r = .09. This difference in slope was not present when binocular depth cues were available, b = 0.01, t(1,828) = 0.11, p = .91, r = .00.
Mean altitude estimates for the runway terrain for each group of observers: undergraduates (circles) and aircrew (triangles), for the monocular and binocular viewing conditions. Solid lines represent the predicted fit, and the data points in the rectangle represent the standard error of the mean at a simulated altitude of 30 in. (76.2 cm). The dotted line represents geometric predictions.
Estimates in the runway condition were consistently more variable than in the grass and stones conditions. For the runway terrain, the root-mean-square error (RMSE) between estimated altitude and the predicted linear fit for undergraduates and aircrew in the binocular viewing condition was 5.98 and 10.14 in. (15.2 and 25.8 cm), respectively. However, for the grass and stones terrains, the RMSE was smaller for both undergraduates (RMSEgrass = 2.93 in. or 7.44 cm, RMSEstones = 2.13 in. or 5.41 cm) and aircrew (RMSEgrass = 3.48 in. or 8.84 cm, RMSEstones = 4.01 in. or 10.19 cm). Recall that to make the width of the runway line a less informative distance cue, we varied its width and position from trial to trial. All observers were told prior to testing that the width of the line was not correlated with the simulated altitude and so was an unreliable cue to distance. Even so, observers’ altitude estimates decreased with increasing line width, b = −7.7, t(3,656) = −5.76, p < .0001, r = .09. This pattern was the same for both aircrew and undergraduates, b = −0.8, t(3,656) = −0.42, p = .68, r = .01, and for both monocular and binocular viewing conditions, b = 2.68, t(3,656) = 1.42, p = .16, r = .02.
Discussion
The aim of our study was to determine whether the contribution of binocular and monocular cues to altitude estimation is modulated by relevant aviation experience. Specifically, we evaluated whether rotary-wing aircrew would better capitalize on monocular cues than undergraduate by comparing relative accuracy in terrain conditions where size-scaling was a viable distance cue under monocular viewing. As anticipated from our previous work, binocular altitude estimates were more accurate than monocular estimates. The combination of reliable binocular cues to absolute viewing distance in near space (Cormack, 1984; Foley, 1980; Gillam, Chambers, & Lawergren, 1988; Longuet-Higgins, 1982; Mayhew, 1982) with binocular disparity greatly increases the observer’s ability to estimate the amount of depth between neighboring objects (Howard, 2012). In our binocular viewing condition, the long exposure duration allowed observers’ altitude estimates to be aided by changes in vergence eye movements and stereopsis. The advantage provided by stereopsis, that is, the difference in slope under binocular relative to monocular viewing in the grid condition, was similar for undergraduate observers and aircrew (Figure 5). These results are consistent with Deas et al. (2017) and studies that have shown improved accuracy of distance judgments in the presence of stereopsis relative to monocular viewing in immersive stereoscopic simulations of aerial refueling (Lloyd & Nigus, 2012; Winterbottom et al., 2016) and helicopter landing tasks (Winterbottom et al., 2017). The pattern of overestimation at near and underestimation at far distances seen in the grid terrain is consistent with observers’ reliance on a highly variable vergence signal to scale depth from binocular disparity in the absence of other monocular cues to distance (Foley, 1980). Thus, stereopsis alone provides a significant advantage to the accuracy of relative distance judgments at low altitudes, regardless of the observer’s prior training or selection advantages. The advantage afforded by stereopsis may play an even more substantial role in scenarios where monocular cues are degraded due to environmental factors, such as dust or fog. For instance, familiar monocular cues such as ground plane texture and horizon location may be obscured in a dust storm. However, even in the absence of these familiar cues, fine particles would form a disparity-defined volume which could help segregate the ground plane.
When the ground plane contained a texture gradient (grass, stones, and runway), observers could incorporate the size-distance scaling of the texture relative to the skid to estimate perceived changes in simulated altitude. The relative size of objects and changes in runway or terrain perspective are important visual cues that pilots use when landing an aircraft (Entzinger & Suzuki, 2008). In our altitude judgment task, when monocular texture information was presented in isolation, all observers underestimated perceived changes in simulated altitude. Monocular distance cues alone were insufficient to support accurate altitude judgments. Observers were accurate only when the monocular texture cues were combined with binocular cues to distance. Classic studies of size constancy show that perfect constancy is only achieved when size-distance scaling is combined with binocular cues to distance (Holway & Boring, 1941). Thus, the combination of binocular distance cues, such as vergence eye movements and stereopsis, and the size-distance scaling of texture cues were necessary for observers to accurately detect changes in simulated altitude during low hover.
Although the pattern of results was similar for both types of observers when binocular cues were available, the performance of aircrew differed from that of undergraduate observers in the monocular viewing condition. When binocular cues were unavailable in the grass and stones terrain conditions, the slope of the altitude estimates for aircrew was significantly steeper relative to undergraduate observers (Figures 3 and 4). Aircrew were able to use size-scaling of monocular information more effectively than undergraduate observers. The aircrew in this study consisted of pilots or flight engineers who make verbal altitude estimates (i.e., call-outs) during helicopter landing operations. They are trained to capitalize on relative size cues, such as tree height or road width while estimating altitude. It has been shown that task-specific training helps observers use monocular cues more effectively during depth estimation (Benbassat & Abramson, 2002; Gibson, 1953; Palmisano, Favelle, Prowse, Wadwell, & Sachtler, 2005). In our study, experience might have aided aircrew’s ability to use these monocular distance cues to judge altitude. As outlined in the Observers section, aircrew undergo a rigorous selection process and are highly motivated. Thus, our results necessarily reflect the abilities and training of these selected personnel. Although their operational experience is associated with greater accuracy with monocular cues alone, the aircrew still performed best when monocular information was combined with binocular cues to distance. Thus, even with extensive training and a rigorous selection process, aircrew still benefit from the presence of stereopsis. Our results suggest that aircrew with no binocular vision would not perform well on our stereoscopic task. However, additional research is needed to determine whether monocular aircrew (i.e., aircrew that have lost the use of one eye) would have an advantage over binocular aircrew at processing monocular depth cues due to their extensive practice using monocular cues alone.
If the information from monocular depth cues is unreliable (i.e., does not scale with apparent distance), then depth estimates may be less precise. All observers were influenced by the runway line size-scaling even though they knew it was an unreliable depth cue. Previous research with naïve observers has shown that conflicts between depth from binocular disparity and size-scaling can produce large interobserver differences in perceived depth (Allison & Howard, 2000; Sato & Howard, 2001; Steven & Brookes, 1988). Depending on the viewing scenario, reliance on monocular depth cues could help or hinder task performance. If other depth cues are absent, the ability to efficiently use monocular size-distance scaling could be a great benefit. However, if monocular cues are unreliable, misleading, or obscured, then reliance on these cues could have negative consequences. Our data indicate that despite the advantage to monocular depth estimation that aircrew demonstrated, they were still susceptible to the influence of unreliable monocular size cues.
Conclusion
We explored the advantages provided by binocular vision and experience on low hover altitude estimation, a task routinely performed by military pilots and flight engineers. Aircrew exhibited improved accuracy in the monocular viewing condition compared with undergraduate observers. When monocular depth cues were unreliable all observers made biased depth judgments. Even though the experience and training of aircrew improved their accuracy when binocular cues were absent, it was not sufficient to achieve the same level of performance as when stereopsis was available. It is also clear from this study that depth cues are integrated, given that monocular altitude judgments were impacted by the utility of monocular cues provided and that the availability of texture cues further enhanced the accuracy of stereoscopic altitude judgments compared with stereopsis alone. Therefore, aircrew training should incorporate various sources of depth information depending on the viewing scenario to make distance estimates robust under potentially hazardous environmental conditions, and stereopsis should be considered an important factor in aircrew medical screening.
Key Points
Binocular viewing/stereopsis improves altitude estimation for all terrain types in aircrew and undergraduate observers.
Aircrew more accurately estimated altitude using monocular cues compared with undergraduate observers.
The most accurate altitude judgments are made when both binocular and reliable monocular cues are available.
Our findings suggest that stereopsis plays an important role in rotary wing altitude estimation.
Footnotes
Appendix
Results Summary of the Linear Mixed-Effects Analysis for Each Terrain

| Estimate | SE | t Test | p Value | r | |
|---|---|---|---|---|---|
| Grass Terrain | |||||
| Fixed effects | |||||
| Altitude × view: monocular | 0.49 | 0.04 | 11.16 | <.0001 | .18 |
| Altitude × observer: undergrad | 0.39 | 0.04 | 8.88 | <.0001 | .20 |
| Altitude × view: monocular × observer: undergrad | −0.22 | 0.06 | −3.52 | <.001 | .06 |
| Fixed effects: monocular subset | |||||
| Altitude × observer: undergrad | 0.39 | 0.04 | 8.88 | <.0001 | .20 |
| Fixed effects: binocular subset | |||||
| Altitude × observer: undergrad | 0.17 | 0.04 | 3.91 | .0001 | .09 |
| Stones Terrain | |||||
| Fixed effects | |||||
| Altitude × view: monocular | 0.47 | 0.04 | 12.61 | <.0001 | .20 |
| Altitude × observer: undergrad | 0.20 | 0.04 | 5.36 | <.0001 | .09 |
| Altitude × view: monocular × observer: undergrad | −0.16 | 0.05 | −2.94 | <.01 | .05 |
| Fixed effects: monocular subset | |||||
| Altitude × observer: undergrad | 0.20 | 0.04 | 5.07 | <.0001 | .12 |
| Fixed effects: binocular subset | |||||
| Altitude × observer: undergrad | 0.04 | 0.04 | 1.28 | .20 | .03 |
| Grid Terrain | |||||
| Fixed effects | |||||
| Altitude × view: monocular | 0.42 | 0.04 | 9.49 | <.0001 | .16 |
| Altitude × observer: undergrad | 0.06 | 0.04 | 1.37 | .17 | .02 |
| Altitude × view: monocular × observer: undergrad | 0.04 | 0.06 | 0.63 | .53 | .01 |
| Runway Terrain | |||||
| Fixed effects | |||||
| Altitude × view: monocular | 0.74 | 0.06 | 12.89 | <.0001 | .21 |
| Altitude × observer: undergrad | 0.22 | 0.06 | 3.91 | .0001 | .06 |
| Altitude × view: monocular × observer: undergrad | −0.22 | 0.08 | −2.69 | .01 | .04 |
| Fixed effects: monocular subset | |||||
| Altitude × observer: undergrad | 0.22 | 0.06 | 3.98 | .0001 | .09 |
| Fixed effects: binocular subset | |||||
| Altitude × observer: undergrad | 0.01 | 0.06 | 0.11 | .91 | .00 |
| Fixed effects: runway width | |||||
| Width | −7.7 | 1.34 | −5.76 | <.0001 | .09 |
| Width × view: monocular | 2.68 | 1.89 | 1.42 | .16 | .02 |
| Width × observer: undergrad | −0.80 | 1.88 | −0.42 | .68 | .01 |
| Width × view: monocular × observer: undergrad | −5.30 | 2.65 | −2.00 | .05 | .03 |
Note. Predictors are abbreviated and followed by the reference level of the contrast. Altitude = altitude; view = viewing condition; observer = observer type; width = runway width.
Acknowledgments
This work was funded by the Canadian Department of National Defence under the scientific direction of Defence Research and Development Canada. This research was also funded by an Ontario Graduate Scholarship to Hartle.
Brittney Hartle is a PhD candidate in psychology at York University, Toronto. She obtained her MA in psychology at York University in 2016.
Aishwarya Sudhama is a research coordinator at the Centre for Vision Research at York University. She obtained her MSc in biology at York University in 2017.
Lesley M. Deas is a postdoc at the Centre for Vision Research at York University. She received her PhD in psychology from York University in 2015.
Robert S. Allison is a member of the Centre for Vision Research, York research chair, and professor in the Department of Electrical Engineering and Computer Science at York University. He obtained his PhD in biology (vision science) in 1998 from York University.
Elizabeth L. Irving is a professor and university research chair in the School of Optometry and Vision Science at the University of Waterloo. She received her OD (1983) and PhD in vision science (1984) from the University of Waterloo.
Mackenzie G. Glaholt is a scientist at Defence Research and Development Canada. He received his PhD in psychology from the University of Toronto in 2010.
Laurie M. Wilcox is a professor of psychology and member of the Centre for Vision Research at York University, Toronto. She obtained her PhD in psychology at the University of Western Ontario in 1992.