
Abstract
Objective
The objective of this study was to assess police officers’ performance and workload in using two mobile computer terminal (MCT) configurations under operational and tactical driving conditions.
Background
Crash reports have identified in-vehicle distraction to be a major cause of law enforcement vehicle crashes. The MCT has been found to be the most frequently used in-vehicle technology and the main source of police in-vehicle distraction.
Method
Twenty police officers participated in a driving simulator-based assessment of driving behavior, task completion time, and perceived workload with two MCT configurations under operational and tactical levels of driving.
Results
The findings revealed that using the MCT configuration with speech-based data entry and head-up display location while driving improved driving performance, decreased task completion time, and reduced police officers’ workload as compared to the current MCT configuration used by police departments. Officers had better driving but worse secondary task performance under the operational driving as compared to the tactical driving condition.
Conclusion
This study provided an empirical support for use of an enhanced MCT configuration in police vehicles to improve police officers’ safety and performance. In addition, the findings emphasize the need for more training to improve officers’ tactical driving skills and multitasking behavior.
Application
The findings provide guidelines for vehicle manufacturers, MCT developers, and police agencies to improve the design and implementation of MCTs in police vehicles considering input modality and display eccentricity, which are expected to increase officer and civilian safety.
Introduction
Motor vehicle crashes are the major cause of fatal occupational injuries in the United States, accounting for 37% of all fatalities in 2015 (Bureau of Labor Statistics [BLS, 2016a]), and among public safety workers, the crashes account for 44% of all fatalities (BLS, 2016b). Comparing different public safety workers, law enforcement officers are involved in the highest number of fatal crashes, followed by firefighters and emergency medical services workers (BLS, 2016b). Crash reports from different states including Texas, Missouri, Illinois, Minnesota, and South Carolina have identified in-vehicle distraction, especially mobile computer terminal (MCT) use, as the leading cause of police accidents (Citrowske et al., 2011; Yager et al., 2015). Review of police-involved vehicle crashes in Minnesota has also identified the MCT as the main portion of police auto liability claims and costs (Citrowske et al., 2011). The MCT is a laptop computer that provides officers with detailed information (e.g., vehicle information, reports, and navigation) while out on patrol. However, the secondary task requirements of manual input and the eccentricity of the display (i.e., downward in the passenger side) may come at the cost of driving task performance.
Secondary Tasks and Driving Performance
Lee et al. (2009) defined driving distraction as a “diversion of attention away from activities critical for safe driving toward a competing activity” (p. 34). In-vehicle technologies can cause visual, auditory, physical, and cognitive distraction, all of which may negatively impact driver performance (Young & Regan, 2007). The extent to which driving task demands affect performance outcomes is relative to how much resources are needed to execute the driving task (Matthews et al., 2001). These driving demands can be grouped by goals into three levels of operational, tactical, and strategic driving. Operational driving often involves automatic processes for vehicle control and refers to immediate longitudinal and lateral control such as lane keeping or following a lead vehicle (Kircher et al., 2013; Matthews et al., 2001). Tactical level of driving requires higher cognitive demands (i.e., rule-based decisions) to develop and execute short-term goals in the driving task, such as passing maneuvers or overtaking (Zhang et al., 2014). In addition, in tactical driving, the driver is making decisions about what will happen in the traffic and makes anticipatory risk avoidance (Lundqvist & Alinder, 2007). The strategic driving control involves higher-level decisions such as route planning and en route decisions on the roadway regarding the driver’s destination (Matthews et al., 2001). Of these three levels of driving, operational and tactical levels of driving are most critical to driver safety in order to maintain safety margins on the roadway and around other operating vehicles (Kaber et al., 2012).
Integrating in-vehicle technology demands with particular levels of driving has the potential to increase workload and decrease driving performance to an extent that drivers are unable to adapt to these complex situations. In a study examining adaptive behaviors in tactical driving, Horrey and Simons (2007) found that drivers were able to use adaptive safety behaviors while performing a cognitive task in operational steady-state driving conditions but were not able to employ adaptive behaviors in the tactical condition. Kaber et al. (2012) found that under operational driving control, drivers were able to compensate visual demands. However, under complex tactical driving, participants were unable to compensate the driving task due to higher demands, especially under visual/cognitive distractions. Similar results were found by Zhang et al. (2014) comparing visual/manual and cognitive/audio distractions. The results of these studies suggest that the effects of in-vehicle technologies may pose an additional threat to the driving task and are additive in nature (Lee et al., 2007), especially in more complex situations such as tactical maneuvers of passing vehicles on the roadway.
The technologies (e.g., MCT, radio system) used in police vehicles are more complex than technologies used by civilian drivers and they require greater physical, visual, and mental workload for officers. In addition, crashes involving emergency vehicles due to in-vehicle sources were found to be more severe than crashes involving civilian driver distraction by in-vehicle sources, which might be due to the complexity of in-vehicle technologies (Liu & Donmez, 2011). Therefore, it is critical to recognize the effect of performing secondary in-vehicle tasks on officers’ driving performance. In addition, the potential secondary task interference of in-vehicle technologies needs to be assessed in operational and tactical levels as driving for law enforcement is more tactical in nature, especially in emergency modes.
Mobile Computer Terminal and Officers’ Distraction
Although the MCT has been cited as a major source of distraction in several crash reports (Citrowske et al., 2011; Matthews, 2015), many officers need to interact with the device while driving as part of their job (Yager et al., 2015; Zahabi & Kaber, 2018a). Prior studies found the MCT to have a significant negative impact on visual attention allocation, situation awareness, and subjective workload as compared to conditions without using the MCT (Filtness et al., 2013; Garrison et al., 2012; Williams et al., 2013; Zahabi & Kaber, 2018a). Williams et al. (2013) and Zahabi and Kaber (2018b) did not find any significant effect of MCT use on driving performance as compared to the baseline driving condition (i.e., no MCT use while driving), meaning that officers protected the main task of driving to maintain acceptable levels of driving performance. However, it is important to note that these studies only investigated the effect of MCT use under operational driving control. Having said this, redesigning the MCT interface to reduce the amount of irrelevant information presented on the screen was found to have a significant positive effect on officers’ attention on the roadway and task completion time (Zahabi & Kaber, 2018b).
Voice-based systems have also been tested for police patrol use to reduce driver workload and increase road safety (e.g., Filtness et al., 2013; Mitsopoulos-Rubens et al., 2013). It was found that the visual-output–manual-input MCT required more time and higher physical demands as compared to the visual-output–voice-input and audio-output–voice-input displays (Mitsopoulos-Rubens et al., 2013). In another study, Kun et al. (2004) found the speech-based user interface to be most useful for the officers while driving and the graphical user interface to be useful while the patrol vehicle was parked. A review by Kun et al. (2015) also emphasizes the need for using speech-based user interfaces in emergency vehicles and training emergency responders to interact with these devices while driving. Although speech-based interfaces have been examined in police domain, none of the prior studies eliminated the need to redirect attention downwards to the current MCT placement and consequently led to divided attention between the primary driving task and secondary MCT tasks.
Effect of In-Vehicle Display Location
Wittmann et al. (2006) explained degradation in driver performance and the eccentricity of displays as “a function of distance between the line of sight to the outside primary task and the onboard display position.” Displays placed closer to the line of sight help the driver to keep his/her eyes on the road and have resulted in better driving performance such as salient cue detection (Sojourner & Antin, 1990), lane keeping (Summala et al., 1996), and brake reaction time (Summala et al., 1998). Although the effect of in-vehicle display location on driving performance and workload has been studied extensively for civilian drivers, investigations of police MCT locations were limited to their physical effects (e.g., McKinnon et al., 2012, 2014; Saginus et al., 2011). It was found that locating the MCT as close as possible to the steering wheel was less physically demanding and reduced discomfort and musculoskeletal risk factors.
Problem Statement
Crash reports revealed that police vehicles are involved in significantly more crashes as compared to other emergency vehicles, with distracted driving being a major contributor to these crashes. MCTs have been cited as a major source of distraction in police vehicles. Current research lacks a solution that eliminates the need to manually interact with the computer, while keeping the display in the officer’s field of view. The demanding driving conditions in emergency situations also warrant investigation into different levels of driving control behavior. Due to the complexity of police in-vehicle tasks and driving conditions, there is a need to enhance the MCT configuration while accounting for different levels of driving control behavior. Therefore, the objective of this study was to conduct a driving simulator-based assessment of driving performance and workload with two MCT configurations under operational and tactical driving conditions.
Method
Participants
Twenty male police officers (age: M = 33.17 years, SD = 6.78 years) were recruited from various police departments within the Wichita area. The sample size was determined based on the review of prior police driving simulation studies. All participants reported prior experience in using the MCT while driving (experience level [0–100 scale]: M = 70.26%, SD = 18.28%), had 20/20 vision or corrected vision, and drove police vehicles on a regular basis (M = 7.32 hr per shift, SD = 2.05 hr per shift). The study took approximately 2 hr to complete and the officers were paid $70 for their time. The Wichita State University Institutional Review Board approved the study procedure.
Apparatus
The experiment employed DriveSafety HyperDrive driving simulator (Figure 1). The simulated driving tasks were created using HyperDrive Authoring Suite™ version 1.6.1 and controlled by Drive Safety’s Simulation Software™ version 1.6.1. Officers interacted with a medium-fidelity simulator through multiple controls, consisting of a Logitech G29 steering wheel, accelerator, brake pedal, and a gear shift that required participants to press the start button at the beginning of every trial. The simulator recorded driver control actions and vehicle states to log files with a sampling frequency of 60 Hz. The driving environment was displayed on a 50-inch (127 cm) television monitor (SHARP AQUOS Quattron 3D). The distance between the center of the steering wheel and the monitor was set at 152 cm. The TV and speaker system generated auditory feedback for drivers (vehicle and traffic sounds).

Hyperdrive driving simulator with the baseline mobile computer terminal configuration.
In addition to the simulator display, a 13.5-inch (34.29 cm) Microsoft Surface Book laptop was positioned to the right side of the driver (Figure 1). The location of the laptop and its data entry format (i.e., manual) was based on the MCT configuration in police vehicles (hereafter called baseline MCT). For the other MCT configuration (hereafter called enhanced MCT), the same Surface Book was used in a tablet form, allowing for no variance in the MCT interface information display except for position and input method. The enhanced MCT was positioned to the right of the steering wheel and above the middle console (Tretten et al., 2011; Wittmann et al., 2006; Figure 2) such that it did not block officers’ view of the driving scenarios (Tretten et al., 2011). The vertical and horizontal eccentricities between the center of the MCT and the center of the roadway scene were 10.51° and 14.59°, respectively, in the enhanced MCT and it was based on measurements of an actual police vehicle. In the baseline configuration, participants were required to manually enter the information and navigate through the query pages (similar to the current MCT configuration in police vehicles). In trials using the enhanced MCT configuration, participants were required to verbalize through a speech-to-text system (similar to the format of head-up display [HUD] controls in the market such as Navdy Look Forward© Display) to specify the state name and license plate number as well as specified commands (i.e., “next,” “previous,” and “new query”) to navigate through the return pages containing the information.

Hyperdrive driving simulator with the enhanced mobile computer terminal configuration.
Both MCT interfaces presented a license plate query task made using Justinmind prototyping tool (https://www.justinmind.com; Figure 3). The license plate query was chosen based on decision tree analysis and cognitive modeling by Zahabi and Kaber (2018a). In accordance with the actual police MCT interface, information such as driver insurance, plate, and vehicle information was included across different return screens.
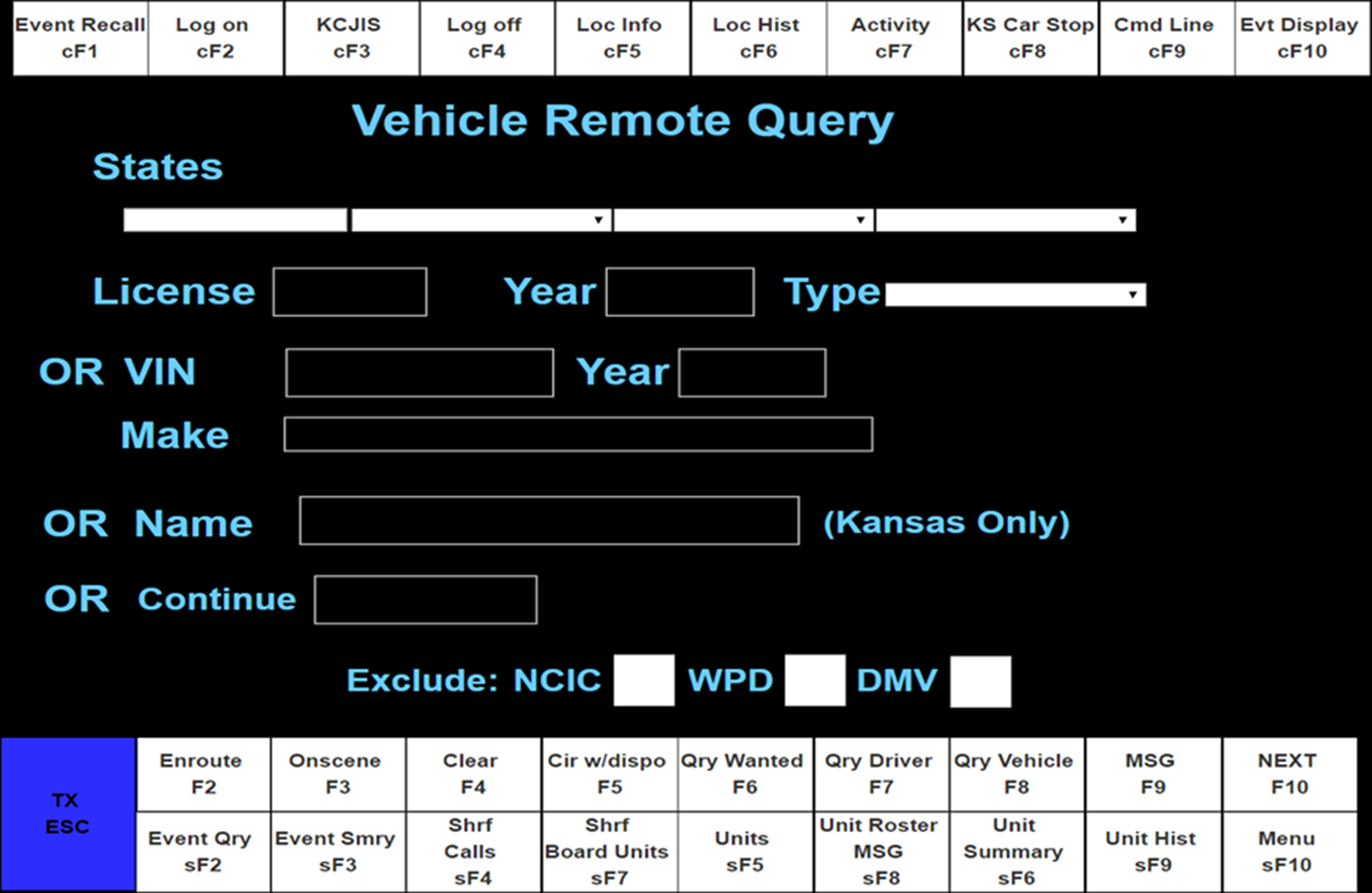
Example of license plate query page.
Independent Variables
The independent variables manipulated in this study included (1) MCT configuration and (2) driving control level. The MCT configuration had two levels including the baseline and enhanced MCT. There were two levels of driving control: operational (i.e., car following) and tactical (i.e., passing maneuvers) driving. It is important to note that although in this study the two MCT configurations were different in terms of both physical display location and input modality, the decision to combine these factors was made due to practical implications, representing the current format of HUDs (i.e., speech-based data entry) in the market and police MCTs (i.e., manual data entry with a head-down display location). Furthermore, prior studies (e.g., Filtness et al., 2013; Mitsopoulos-Rubens et al., 2013) have already compared different modalities of information presentation in traditional MCTs (i.e., head-down display location); however, those designs could not completely solve officers’ driving distraction issues as the officers were still required to look down to read the information on the display.
Experimental Design
The experiment followed a 2 × 2 within-subject design with replication. All participants experienced eight randomized trials (i.e., two trials for each driving control level [i.e., operational or tactical] and MCT configuration [i.e., baseline or enhanced]). In each simulation, participants were required to perform two plate number checks in segments of the scenario where they were either following a front vehicle or passing the vehicles with lower speed. However, the locations of the occurrences of the plate-check task were varied among the trials to limit any potential learning effect from one trial to another.
Dependent Variables
The dependent variables included driving performance (speed variance, steering entropy), workload, and secondary task completion time. Speed variance was calculated as the mean difference between the instantaneous speed and the posted speed limit (i.e., 40 mph; Zahabi & Kaber, 2018b). Steering entropy describes an individual’s assessment of the roadway and steering behavior to stay within certain safety margins of the driving task and was calculated based on the revised method of Boer et al. (2005). Driving performance measures were collected while the officers were performing the secondary task. Subjective workload ratings were measured by the Driver Activity Load Index (DALI) developed by Pauzié and Pachiaudi (1997). Task completion time began when participants started the plate number check task and ran until they verbally provided an answer to the experimenter regarding a plate status (Zahabi & Kaber, 2018b).
Driving Scenarios
The experiment consisted of eight simulated driving trials (each lasting about 6 min), which participants were required to drive in a dense urban environment. The scenarios presented a four-lane roadway condition with two lanes on either side of a double-yellow line with opposite directions of travel. In addition, there were several parked cars on either side of the road to increase the realism of the scenarios similar to an actual urban driving situation. The speed limit on all roadways was 40 mph (67.37 kph) and the traffic density was set as level service C (i.e., four to five cars per minute per lane; Transportation Research Board, 1994).
Law enforcement driving can be categorized into three general driving situations, which include standard patrol, emergency response, and vehicle pursuit. In this study, the driving scenarios simulated a standard patrol situation for officers in which all roadway driving regulations (e.g., speed limit, traffic lights) had to be followed. In order to further promote the realism of the police vehicle operation simulation, a real recorded police radio broadcast was played during each trial (Filtness et al., 2013). The operational and tactical conditions were established through the design of driving scenarios and instructions given to the participants. Based on Horrey and Simons’s study (2007), in operational condition, the drivers were asked to follow a lead vehicle at a fixed distance and adjust their speed accordingly. Tactical driving condition was simulated through executing a passing maneuver in traffic. The drivers were asked to pass the slow moving vehicles when it was safe and return to the original lane once the passing maneuver was completed.
Secondary Task
At two predetermined points along the driving scenario (during operational or tactical driving), officers were asked to perform the plate number check using the MCT. An automated voice from the simulator provided the instruction and the plate number information for the officers. Once the participants entered the plate number and completed the submission, they were posed with a specific question regarding the vehicle information. Questions (e.g., what is the status of driver license?) were selected based on prior interviews with police officers (Zahabi & Kaber, 2018a). The secondary task was completed once the officer verbally provided the answer to the experimenter.
Procedure
Initially, the participants were asked to complete the informed consent form and the background questionnaire asking about their age, training, years of experience as a police officer, and MCT experience. Upon completion of the forms, participants were provided with a training session (Training 1, Figure 4) to become familiar with the MCT (without driving). This training session included verbal instructions on how to use the MCT, participants performing a sample plate number check task with the MCT (without driving), and demonstration of MCT locations on the driving simulator. Subsequently, participants were introduced to the driving simulator setup and controls, which was followed by administration of the second training trial (Training 2). The training trial was identical to the experiment trials minus the inclusion of the secondary task. At the end of the training trial, participant speed and lane deviations were calculated to verify that they met the established performance criteria (i.e., absolute lane deviation ≤ 1.37 ft [0.42 m], and absolute speed deviation ≤ 2 mph [3.27 kph]). The lane deviation criterion was defined based on Horrey and Wickens (2004) and the speed deviation criterion was established based on the average speed deviation for three experienced simulator drivers in a pilot study (Zahabi & Kaber, 2018b; Zahabi et al., 2017). Upon successful completion of training, participants were also provided with an additional training session with the use of different MCT configurations for performing a sample secondary task while driving (Training 3). After completion of this training, an electronic version of the simulator sickness questionnaire (SSQ; Kennedy et al., 1993) was used to assess the risk of developing simulator sickness. Subsequently, participants provided relative ratings of different workload contributors using the DALI. Participants were provided with a 5-min break between trials and the SSQ was administered after every other trial while the DALI was administered after each trial. After the completion of the eight experimental trials, participants were debriefed and compensated for their time. The entire experiment took approximately 2 hr to complete.

Study procedure. DALI = Driver Activity Load Index; MCT = mobile computer terminal; SSQ = simulator sickness questionnaire.
Hypotheses
Based on the literature review, six hypotheses (H) were formulated for this study as shown in Table 1. The objective of hypotheses 1 through 3 (H1–H3) was to assess the effect of different MCT configurations on police officers’ driving and secondary task performance and perceived workload. These hypotheses were based on the findings of Horrey et al. (2003), Jakus et al. (2015), and Wu et al. (2016). Hypotheses 4 through 6 (H4–H6) were formulated to investigate the impact of different levels of driving control on officers’ primary and secondary task performance and workload. These hypotheses were based on the results of Horrey and Simons (2007), Kaber et al. (2012), and Zhang et al. (2014).
Experiment Hypotheses (Hypotheses Number in Parentheses)

Note. MCT = mobile computer terminal.
Data Analysis Procedure
First, data screening procedures were performed to find any outliers in the dataset due to abnormal participant driving or task behavior and/or equipment error. A total of 10 outliers (2 steering entropy, 4 speed variance, and 4 task time) were identified and removed before data analysis. The outliers were initially identified based on plotting the leverage values and using Cook’s D threshold method. Then, based on reviewing our experiment notes, we removed those points that were observed as abnormal driving or task behavior (e.g., the officer postponed the task and the data collection block has been passed, speed variance of more than 20 mph). Nine additional task time data points were removed since the driving scenario was finished before the officer completed the task. After data screening, diagnostics were conducted to test the assumptions of homoscedasticity using Bartlett’s test (Snedecor & Cochran, 1989) and normality using Shapiro–Wilk’s (Shapiro & Wilk, 1965) test. Some of the response measures failed to satisfy constant variance and normality assumptions; in those cases, transformations (e.g., log, SQRT, exponential transformations to the power of lambda based on Box–Cox method) were attempted. However, only for steering entropy response, the transformation (i.e., log) could satisfy constant variance and normality assumptions. For other responses (i.e., speed variance, secondary task time, and DALI rating) the data were ranked.
Subsequently, an ANOVA was performed comparing driving task performance, secondary task completion time, and perceived workload while using different MCT configurations and under operational versus tactical driving control. The statistical models were generated with participant as a random variable and MCT configuration and driving control level as within-subject factors to assess the effect of experiment manipulations on driving task performance, secondary task completion time, and perceived workload. Officers’ experience level and trial number were added as covariates to the models and were removed if found to be insignificant (the covariates were removed from speed variance, steering entropy, and secondary task performance models). A significance level of α = .05 was used as the statistical criterion in this study. All plots of response measures include untransformed mean values at the top of bars. In addition, all error bars in Figures 5 -8 represent one standard deviation from the mean.
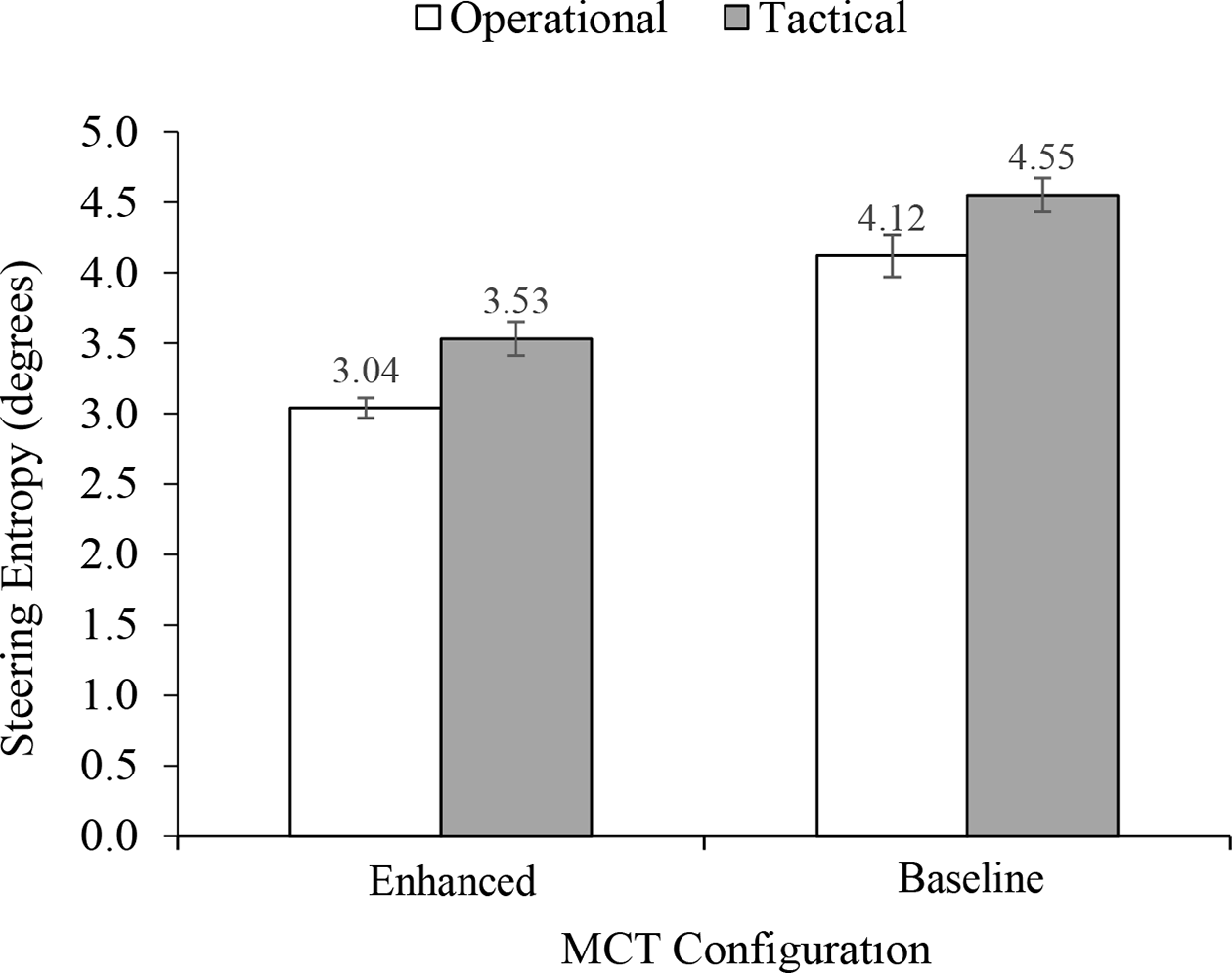
Effect of mobile computer terminal (MCT) configuration and driving control level on steering entropy.
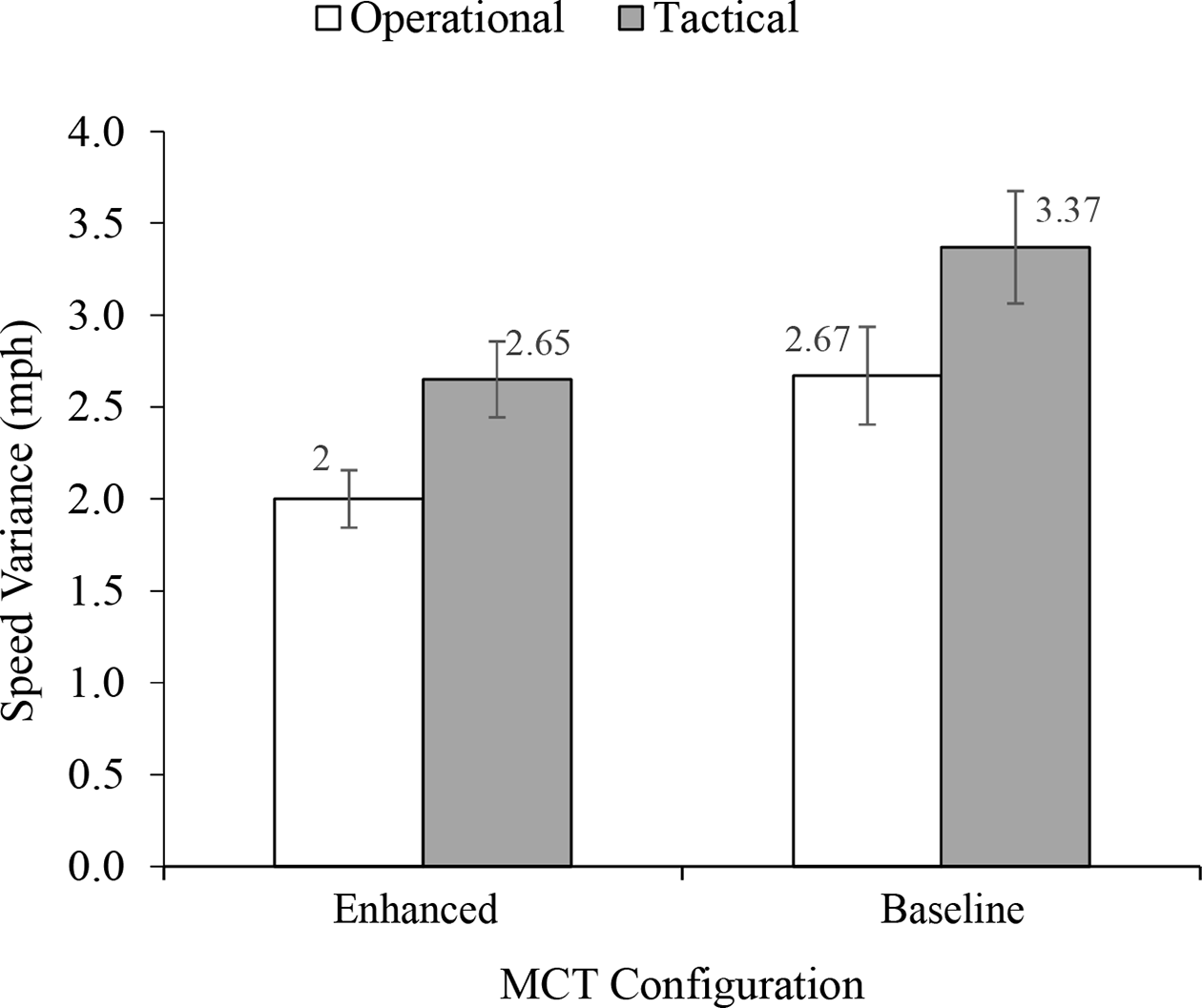
Effect of mobile computer terminal (MCT) configuration and driving control level on speed variance.
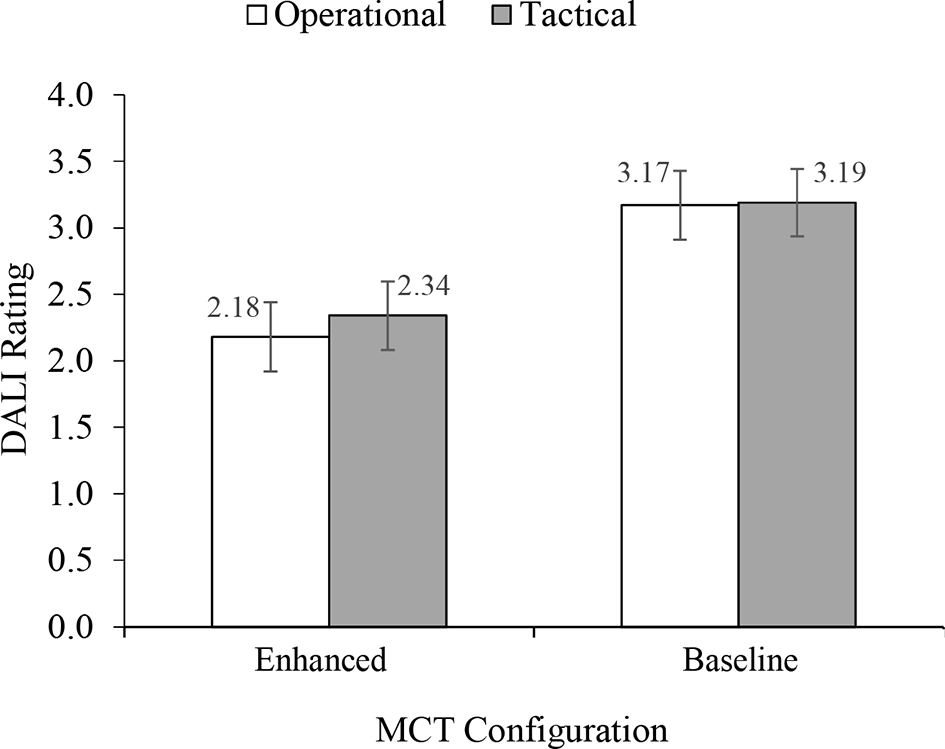
Effect of mobile computer terminal (MCT) configuration and driving control level on perceived workload. DALI = Driver Activity Load Index.
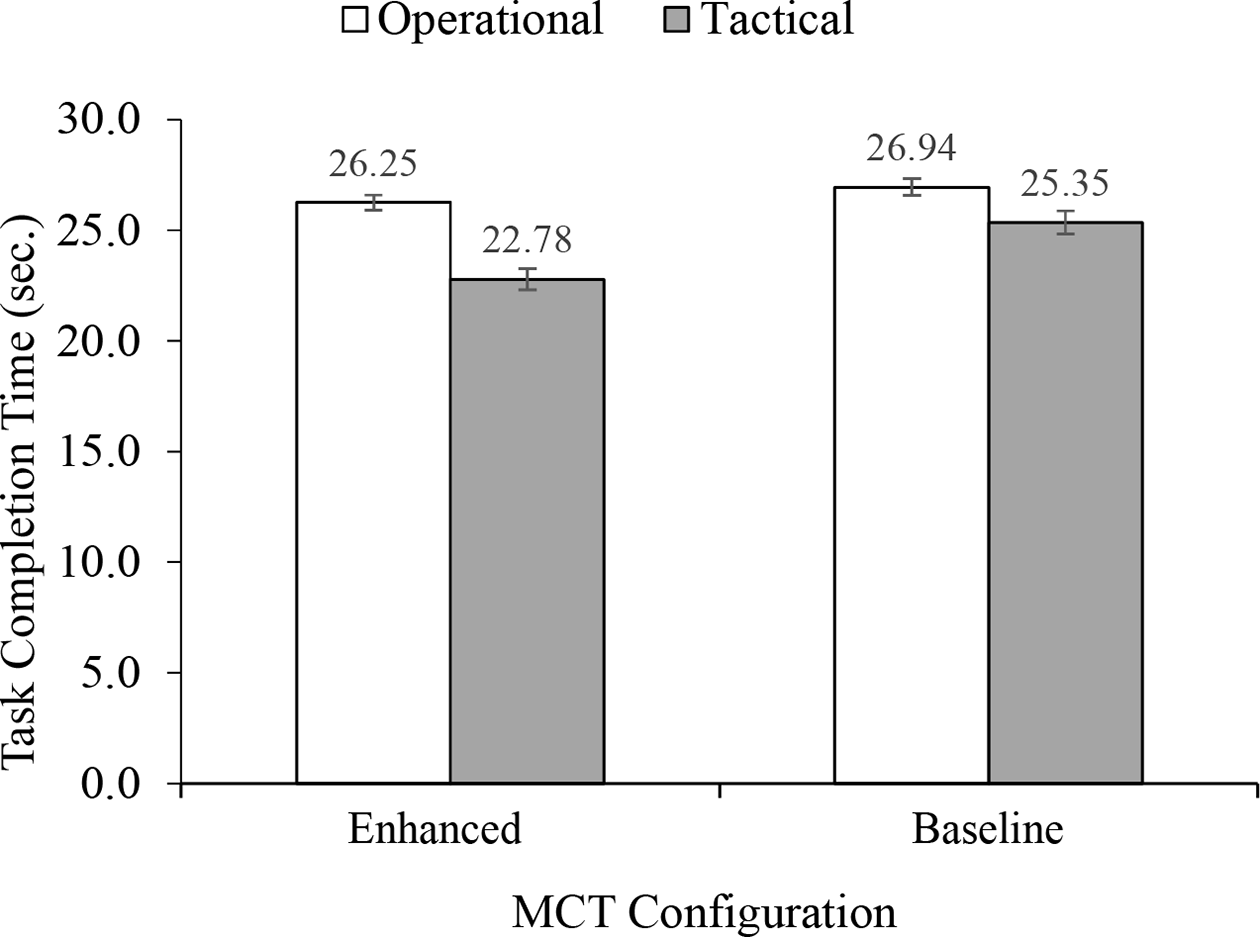
Effect of mobile computer terminal (MCT) configuration and driving control level on task completion time.
Results
Driving Performance
Results revealed a significant main effect of MCT configuration on steering entropy, F(1, 134.9) = 145.69, p < .001, η p 2 = .52 (Figure 5) and speed variance responses, F(1, 133.7) = 4.28, p = .041, η p 2 = .03 (Figure 6). Furthermore, it was found that the level of driving control had a significant effect on steering entropy, F(1, 134.9) = 29.89, p < .001, η p 2 = .18 (Figure 5) and speed variance responses, F(1, 133.8) = 9.22, p = .003, η p 2 = .07 (Figure 6). However, there was no significant interaction between the MCT configuration and driving control level for steering entropy, F(1, 134.9) = 0.09, p = .769, η p 2 = .01 or speed variance, F(1, 133.7) = 0.12, p = .730, η p 2 = .01.
Driver’s Perceived Level of Workload
An ANOVA on the ranked overall DALI score revealed a significant effect of MCT configuration, F(1, 55.97) = 35.14, p < .001, η p 2 = .38 and trial number, F(1, 58.53) = 4.72, p = .034, η p 2 = .06. However, no significant effect was found for driving control level, F(1, 55.97) = 0.18, p = .675, η p 2 = .01. Figure 7 indicates officers’ perceived workload significantly decreased when using the enhanced MCT as compared to the baseline MCT configuration.
ANOVAs on all ranked subdimensions of the DALI including effort of attention; F(1, 55.81) = 15.02, p < .001, η p 2 = .21, visual demand; F(1, 55.89) = 30.30, p < .001, η p 2 = .35, temporal demand; F(1, 55.93) = 13.87, p < .001, η p 2 = .20, interference; F(1, 55.95) = 31.58, p < .001, η p 2 = .36, and situational stress; F(1, 55.84) = 20.36, p < .001, η p 2 = .27 revealed significant effect of MCT configuration. However, MCT configuration had no significant effect on auditory demand, F(1, 56.04) = 2.39, p = .128, η p 2 = .04. Trial number had a significant effect on interference; F(1, 58.83) = 4.39, p = .041, η p 2 = .05, temporal demand; F(1, 58.79) = 8.34, p = .005, η p 2 = .11, and auditory demand; F(1, 58.08) = 5.75, p = .020, η p 2 = .09. Officers’ perceived level of dual task interference, temporal demand, and auditory demand decreased with continued trials.
Secondary Task Performance
An ANOVA on ranked secondary task completion time revealed a significant effect of MCT configuration, F(1, 122.1) = 18.64, p < .001, η p 2 = .14, and driving control level, F(1, 123) = 52.54, p < .001, η p 2 = .31. However, there was no significant interaction between MCT configuration and driving level, F(1, 123.6) = 2.78, p = .098, η p 2 = .02. Figure 8 presents the significantly reduced task completion time for the enhanced MCT as compared to the baseline MCT configuration under both operational and tactical levels of driving. However, task completion time increased under operational driving as compared to tactical level of driving.
Summary of Results
A summary of study findings and tests of hypotheses is presented in Table 2.
A Summary of Research Findings
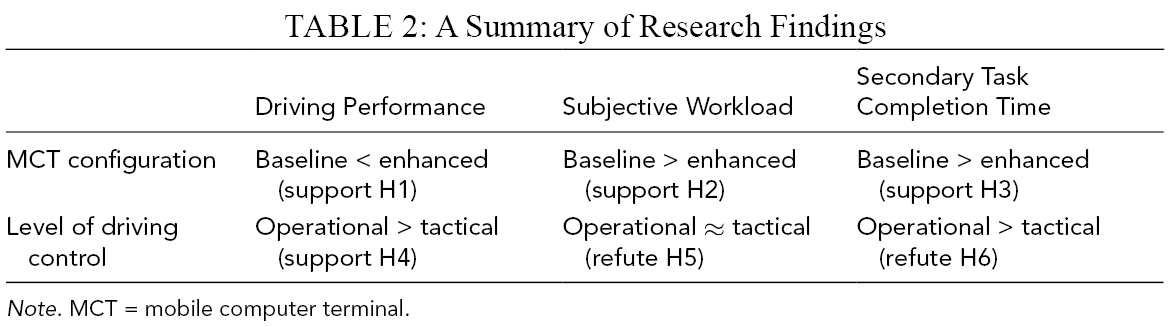
Note. MCT = mobile computer terminal.
Discussion
Effect of MCT Configuration
We expected the use of enhanced MCT configuration to improve officers’ driving performance (i.e., less speed variance and lower steering entropy; H1), reduce officers’ perceived level of workload (H2), and reduce secondary task completion time (H3) as compared to using the baseline MCT. All of these hypotheses were supported by the data.
The driving performance results are attributable to both location and input modality of the enhanced MCT configuration. In our previous investigation (Zahabi & Kaber, 2018b), we did not find any significant effect of MCT configuration on officers’ driving performance. However, this discrepancy might have been due to two major differences between the current study and our prior investigation. First, in the previous study, the MCT interface was only enhanced in terms of information presentation format (e.g., the enhanced MCT design ranked the information on each page and provided a summary page for the officers) but the display location and data entry format were the same as the baseline MCT interface. Second, the present study investigated more complex driving conditions involving both operational and tactical driving control levels as compared to the prior research, which only considered operational driving. However, our findings of worse driver performance in the baseline MCT condition was supported by Kaber et al. (2012), Medenica and Kun (2007), and Zhang et al. (2014) since this condition required a combination of visual, manual, and cognitive demands as compared to the enhanced MCT, which did not require any manual data entry. Findings of the present study provided empirical support for use of the enhanced MCT configuration to improve officers’ driving performance.
In all subdimensions of the DALI (except the auditory demand) including effort of attention, visual demand, temporal demand, interference, and situational stress, the enhanced MCT configuration significantly reduced the perceived workload. The enhanced MCT was located closer in visual angle to the roadway than the baseline, thus requiring fewer/shorter glances away from the road. In addition, it is possible that officers perceived lower level of workload with the enhanced MCT due to the difference in input modality (i.e., speech to text data entry as compared to manual data entry) that led to less interference with the primary task of driving. Although no other study has compared the MCT configurations in terms of perceived level of workload, Zahabi and Kaber (2018b) found the MCT to increase overall workload as compared to baseline driving and their findings revealed that even basic usability enhancements of MCTs could reduce officers’ workload while driving. Our results indicated that other enhancements to the MCT including changing the data entry format and display location could also reduce officers’ workload in multitasking situations of driving and using the MCT. Our findings are also in line with Medenica and Kun (2007) that found drivers perceived less workload (as measured by NASA-TLX) while using speech-based user interface as compared to manual interaction. Regarding the auditory demand, the insignificant results might have been due to the similarity of both MCT configurations in terms of output modality (i.e., both MCTs provided visual outputs).
The enhanced MCT configuration allowed for more time on the primary task of driving, similar to studies that have found superior task performance for HUDs (He et al., 2015; Horrey et al., 2003; Jakus et al., 2015; Sawyer et al., 2014; Weinberg et al., 2011) and voice-based interfaces (e.g., Mitsopoulos-Rubens et al., 2013). Prior studies have found positive correlations between the secondary task completion time and the number and duration of off-road glances (Blanco et al., 2006; Simons-Morton et al., 2014). More specifically, it was found that each additional second of single glance duration or total off-road glance duration is associated with an increase in crashes and near crashes (CNC) risk. Our finding indicated that, on average, the use of enhanced MCT configuration reduced the secondary task time by 1.66 s and under tactical driving condition, the enhanced MCT reduced the task time by 2.57s (Figure 8). Therefore, this reduction in task completion time has the potential to decrease CNC in police operations. This task time reduction can also improve the efficiency of police officers in multitasking situations of driving and using the MCT, which can ultimately increase their productivity. Secondary task performance is also a measure of residual attentional resources in multitasking situations. Therefore, improved secondary task performance in the enhanced MCT configuration is an objective support for reduced mental workload in this condition.
Altogether, the findings support the use of the enhanced MCT configuration with speed data entry format and HUD location in police vehicles to reduce officers’ workload, and improve driving and secondary task performance.
Effect of Level of Driving Control
We expected that officers would have better driving performance (i.e., less speed variance and lower steering entropy; H4), perceive less workload (H5), and complete the secondary task faster (H6) under operational driving control as compared to tactical driving control. Although H4 was supported, other expectations (H4 and H5) were not supported by the data.
The driving performance results were in line with the findings of Kaber et al. (2012) and Zhang et al. (2014), who found better driving performance in operational driving compared to tactical level of driving for civilian drivers. The findings are due to the nature of these driving control levels. Operational driving refers to basic vehicle control behavior (e.g., speed and lane maintenance), which is mainly automatic in nature. However, tactical driving involves developing strategies to achieve short-term goals (e.g., passing, turning at an intersection), which poses higher cognitive demand on the driver. The findings are useful for designing training protocols for police officers to provide more emphasis on tactical driving skills.
Regarding perceived workload, our results were not in line with the findings of Kaber et al. (2012), who found increased workload in tactical levels of driving compared to operational levels of driving. One possible explanation to the lack of workload difference between operational and tactical driving might be due to administering the DALI forms at the end of the trials. It is possible that the officers forgot the extent of workload that they felt during the trials. In addition, the insignificant results might be due to the subjective nature of this measure. People are usually not consistent in reporting their perceived workload as indicated by prior studies that found disassociations between subjective and objective workload measures (e.g., Baldwin & Coyne, 2003; Shaw et al., 2012; Yeh & Wickens, 1988). The findings should be further validated using a combination of physiological, performance, and objective workload measures (e.g., blink rate, heart rate variability).
We found that task completion time increased under operational driving. Our results were not in line with the findings of Kaber et al. (2012), who found increased secondary task response time under tactical driving condition. One possible explanation for this finding might be that the officers were experienced at performing the secondary tasks while driving. Therefore, they were able to use adaptive strategies of the plate-check task in different levels of driving without feeling cognitively overloaded. However, considering driving performance findings, their adaptive strategy to perform the plate-check task as quick and as accurate as instructed in a more complex driving condition (i.e., tactical driving) caused worse driving performance. Currently, most police departments use San Jose field and evaluation training model (SJPD, 2019) for officers’ driving and multitasking performance training. Under this training protocol, police officers are trained on tactical driving techniques in police academies. Upon graduation, each officer will get specific training on different in-vehicle technologies in a classroom setting. Subsequently, officers will complete field training in real environments by observing from the passenger seat for few days and then will be asked to drive and use different technologies (e.g., MCT) while driving. They are required to meet specific performance standards in different categories (e.g., driving skills, report writing skills) before being certified for solo patrol duty. However, these assessments are typically made through subjective ratings and officers have to learn in the field how to balance between driving and managing secondary tasks. The findings of this study emphasize the need for more police officer training on tactical driving skills and use of in-vehicle technologies while driving.
Conclusion
The main objective of this study was to assess the effect of different MCT configurations under operational and tactical levels of driving on officers’ driving performance, secondary task performance, and perceived workload. Findings suggested that the enhanced MCT configuration which included speed-based data entry and a HUD location improved officers’ performance and reduced their workload. In addition, under operational driving control, officers were able to manage both the driving and secondary task producing better driver performance. However, the secondary task management in complex levels of driving might have come at the cost of the primary task performance (i.e., driving). The findings are expected to be useful for police vehicle manufacturers, MCT developers, and police agencies to understand the effects of MCT location and input method and how improved interfaces can increase officer and civilian safety.
Limitations
This study had some limitations. First, the MCT configurations were different in terms of both input modality and display location. Although this limitation affects the ability to draw conclusion due to having a confounding variable, it was decided for practical implications, representing the current format of HUDs in the market and MCTs currently implemented in police vehicles. However, separating these factors might have other practical advantages, for example, to see which factor is more important and should be prioritized in the enhanced MCT configuration. Second, the background noise from the simulator was not as loud as actual police vehicles. To address this issue and promote the realism of our simulation, we played a recorded radio broadcast as a background noise similar to actual police in-vehicle radio communication. However, in police operations, there might be other sources of noise in the vehicle (e.g., siren) that could interfere with officer’s interaction with the MCT through a speed-based system.
Future Work
Future research should investigate the effect of using the MCT in more complex representations of emergency operations and whether the enhanced MCT configuration can reduce driver distraction and improve performance in those situations. Although this research was focused on improving the MCT interface interaction through manipulations of the eccentricity and speech input, there is a need to assess how the interface could be improved by decluttering the visual information in the wide range of tasks. Finally, this study used subjective ratings to measure driver workload. The subjective workload measures did not reveal any significant difference between operational and tactical levels of driving. Future studies should use more objective measures of workload such as physiological measures (e.g., blink rate, pupil size).
Key Points
The enhanced MCT configuration including speech-based data entry and location improved officers’ driving and secondary task performance and reduced their mental workload.
Under operational driving condition, officers were able to manage both the driving and secondary task producing better driver performance.
Officers’ secondary task management in complex levels of driving might have come at the cost of the primary task performance.
This study provided an empirical support for use of an enhanced MCT configuration in police vehicles to improve officer safety and performance.
Footnotes
Acknowledgment
The authors would like to thank Dr. Joel Suss for his review of the document and comments on the study design and analysis.
Author Biographies
Taylor Shupsky is a doctoral student of psychology at Wichita State University (WSU). He received his MA in psychology from WSU in 2018.
Adriana Lyman is an undergraduate student of psychology at WSU.
Jibo He is an associate professor of psychology at Tsinghua University. He received his PhD from the University of Illinois in 2012.
Maryam Zahabi is an assistant professor of industrial and systems engineering at Texas A&M University and directs the Human-Systems Interaction Laboratory. She received her PhD in industrial and systems engineering from North Carolina State University in 2017.