
Abstract
Objective
This paper reviews recent articles related to human trust in automation to guide research and design for increasingly capable automation in complex work environments.
Background
Two recent trends—the development of increasingly capable automation and the flattening of organizational hierarchies—suggest a reframing of trust in automation is needed.
Method
Many publications related to human trust and human–automation interaction were integrated in this narrative literature review.
Results
Much research has focused on calibrating human trust to promote appropriate reliance on automation. This approach neglects relational aspects of increasingly capable automation and system-level outcomes, such as cooperation and resilience. To address these limitations, we adopt a relational framing of trust based on the decision situation, semiotics, interaction sequence, and strategy. This relational framework stresses that the goal is not to maximize trust, or to even calibrate trust, but to support a process of trusting through automation responsivity.
Conclusion
This framing clarifies why future work on trust in automation should consider not just individual characteristics and how automation influences people, but also how people can influence automation and how interdependent interactions affect trusting automation. In these new technological and organizational contexts that shift human operators to co-operators of automation, automation responsivity and the ability to resolve conflicting goals may be more relevant than reliability and reliance for advancing system design.
Application
A conceptual model comprising four concepts—situation, semiotics, strategy, and sequence—can guide future trust research and design for automation responsivity and more resilient human–automation systems.
Keywords
Recent technological advancements have led to increasingly capable automation, from artificial intelligence that can outperform the best human experts (Bowling et al., 2015; Ferrucci, 2012; Silver et al., 2017) to robots that can leverage human social cues for collaboration (Adams et al., 2000; Fong et al., 2003; Rahwan et al., 2019). This has raised the notion, not without controversy, that artificially intelligent agents or robots may soon be working with people more as coworkers than as tools (Groom & Nass, 2007; Schultz et al., 2007; Sheridan, 2016; Shneiderman, 2020). What interactions can help these artificially intelligent agents communicate and coordinate with human counterparts to promote success in shared tasks?
Current frameworks for the design and evaluation of human–automation systems typically focus on integrating people and automation from a supervisory control perspective, which takes the hierarchical relationship between a supervisor and subordinate as a metaphor for human and machine roles, respectively (Sheridan, 2002). In supervisory control, trust is important because it mediates a human supervisor’s reliance on an automation subordinate. However, as automation capabilities increase, supervisory control may soon give way to lateral control, a relationship more akin to teammates with shared authority in a task. Alongside increasing automation capabilities, organizations are also shifting from hierarchical structures to lateral structures that rely on teams of specialists.
Such developments in automation and organizations have shifted the focus from poor reliability as a source of system breakdowns to factors that affect team cohesion. These factors involve social concepts like etiquette (Parasuraman & Miller, 2004) and reciprocity (Woods, 2019) that maintain positive and productive relationships given variations in tasks, work styles, or the environment. Moving from supervisory control structures to lateral control structures thus raises new questions about trust inautomation, and how to design for trust in these new contexts.
This review integrates recent theoretical developments in trust theory to describe the process of trusting increasingly capable automation—intelligent agents that act with a degree of autonomy. We present a relational view of trust as emerging from interactions, rather than from observations. This reframing of trust as a relational concept accounts for the interdependence of trusting in complex environments, and can help explain not only how trust affects reliance but also how reliance affects trust. This relational view is summarized as four dimensions—situation, semiotics, strategy, and sequence—that inform trust research and design. These four dimensions highlight important influences on trusting during interactions between two or more agents (human or otherwise) operating in complex and dynamic task environments.
Previous Research On Trust in Automation
Trust has been defined as the attitude that an agent will help achieve a person’s goals in a situation characterized by uncertainty and vulnerability (Lee & See, 2004, p. 51). Like other psychosocial constructs, trust cannot be measured directly. Therefore, researchers design experiments to manipulate trust, like comparing two or more versions of automation with different degrees of reliability (de Visser & Parasuraman, 2011), testing different types of trust-signaling behaviors (Cassell & Bickmore, 2000; Chiou & Lee, 2016), or introducing automation failures to see how trust is affected (McNeese et al., 2019). Researchers then measure trust using subjective ratings (e.g., Jian et al., 2000; Madsen & Gregor, 2000) and compare these ratings to trust-related behaviors like reliance on automation (Meyer, 2004). Data from subjective ratings and behavioral data have also been correlated with physiological measures (Bethel et al., 2007; Montague et al., 2014). More recent work has used text analysis to glean attitudes toward automation through open-ended comments (Lee & Kolodge, 2020). These various ways of manipulating and measuring trust have demonstrated that trust is an important construct, underlying how and why people rely on others or on technology when complete understanding or continuous monitoring is infeasible (Parasuraman et al., 2008).
As automation has advanced, studies of trust have emerged in many domains, including ground transportation, healthcare, military applications, and cybersecurity. These studies found that enhancing a person’s understanding of automation process and performance can lead to higher trust in the automation (Lee, Hoffman, et al., 2004, p. 66) and that a person’s trust should be appropriately calibrated to match the automation’s capabilities (Kazi et al., 2007; Verberne et al., 2015). Trust in automation explains a person’s reliance behaviors when an algorithm gives an infeasible solution to a problem (Bertuccelli & Cummings, 2011), and when reliance is on another person instead of an automated aid at varying levels of risk (Lyons & Stokes, 2012). Trust also plays a role in adversarial situations, particularly cyber-intelligences threats, such as identity theft and information manipulation (Bobko et al., 2014; Rockwell, 2002). Even in the absence of adversaries within a team, friction between and within teams can undermine trust and lead team members to suspect that others are not cooperating (Trent et al., 2007). In such cases, the line separating appropriate distrust and unproductive suspicion may depend more on shared purpose and values rather than on perceived reliability or dependability (Sheridan, 2019). This growing variety of domains mediated by trust suggests a reframing of trust is needed. This reframing should go beyond one that is based on monitoring and reliance, toward one that can establish and support trusting relationships (Castelfranchi & Falcone, 2010). Automation that adapts to its environment without human intervention—often referred to as autonomy—makes this reframing more urgent.
The potential broad influence of algorithmic decisions on many public policies like prisoner parole decisions, without direct human control and monitoring, makes placing appropriate trust in increasingly autonomous systems a societal concern (Ananny & Crawford, 2018; O’Neil, 2016; Winfield & Jirotka, 2018). Deep-learning-enabled decision systems, infamous for high-performing outputs that are difficult to explain, have inspired a field of research dedicated to generating explanations (Alvarez-Melis & Jaakkola, 2017; Morris et al., 2017). Frontline workers who are not situated to understand how a decision algorithm reaches a recommendation, coupled with their lack of control over such algorithms, positions the worker and algorithm as teammates that share responsibility in accomplishing a task, based on trust. This is not saying that machines should have responsibility, as others have argued against (Bryson et al., 2017; Friedman & Kahn, 1992). Rather, these shifts in automation autonomy, potential societal impact, and diminished control, undermine the relevance of trust frameworks that have focused on explaining the reliance of individuals observing automation.
Current Trust Frameworks
Following the seminal Lee and See (2004) review on “Trust in Automation: Designing for Appropriate Reliance,” a broad range of studies have focused on reliance behaviors and automation reliability as proxy indicators of trust and trustworthiness, respectively. Such studies continue to offer insights into how appropriate trust in various task contexts can be supported by design, so that trust levels are aligned with the actual capabilities of the automation. The over 2600 citations of Lee and See (2004) in Google Scholar as of June 2020, with roughly 1600 citations occurring in the last 7 years, suggest substantial and sustained concern about trust in automation.
Although the consensus is that trust is a dynamic process, few empirical studies have explored trust as a sociocognitive construct between agents interacting in real time (Schilbach et al., 2013). Later reviews on trust in automation build on the Lee and See (2004) framework, which describes a closed-loop system between trust and reliance behaviors; dynamic interaction with automation influences trust, and trust influences interactions with automation (Glikson & Woolley, 2020; Hoff & Bashir, 2015; Madhavan & Wiegmann, 2007). This framework helped establish the information-processing approach to trust—an approach that explores the relationship between perception, beliefs, affect, and action in human–automation interaction (Eisenberg et al., 1993; Loewenstein & Lerner, 2003; Wickens & Carswell, 2006). For example, a meta-analysis framed trust in terms of the interactions between people, agents, and the environment that influence people’s tendency to rely on automation (Schaefer et al., 2016). The closed-loop model has been extended to a three-layer framework of dispositional, situational, and learned trust, that influence trust-related interactions over time (Hoff & Bashir, 2015). However, similar to previous work, the three-layer framework focuses on a person as an observer of automation, on observations that influence trust, and subsequently reliance and compliance.
Recent work on trust repair frames trust in automation differently (Hoffman et al., 2013; Tomlinson & Mayer, 2009). It assumes that trust is relational—best understood through the interactions between entities. It also assumes that undesired or surprising interactions are likely to occur in any long-term relationship. Understanding trust repair would, ostensibly, help with designing to support appropriate trust and more effective human–automation interactions. Preliminary approaches to trust repair focus on examples using natural language (e.g., explanations, apologies), and conveying performance information, in terms of deciding to rely on automation (de Visser et al., 2018; Kohn et al., 2018). In general, trust based on observations that guide reliance remains the focus when researchers have considered trust repair.
A deeper understanding of relational trust rests on considering humans and automated agents as engaged in joint activity mediated by a shared awareness of each other being engaged in the activity. The concepts of shared intentionality, sometimes termed intersubjectivity, and joint activity highlight the assumption that trust, which mediates human relationships (Tomasello et al., 2005), also mediates human–automation relationships. Despite progress in the study of trust, under these past frameworks, it is difficult to reconcile why in some circumstances people treat computers like people (Kohn et al., 2018; Nass & Moon, 2000; Riedl et al., 2011) and in other circumstances they do not (Dzindolet et al., 2003; Hoegen et al., 2015; Khasawneh et al., 2003; Montague et al., 2010). Furthermore, prior frameworks for trust in automation tend to ignore the relationship structure between the trustor and trustee (e.g., a supervisor versus a peer, or supervisee) or the relationship’s time horizon (e.g., safety culture over a person’s career, versus a finer grain level like error detection during a worker’s shift).
Instead, a vast majority of trust in automation studies, even the few of lateral control automation, focus on performance measures associated with supervisory control like reliance, user acceptance, and decisions to use or not use technology (Cramer et al., 2009, 2008; Gutzwiller & Reeder, 2017; Torre et al., 2018). Recent studies on teaming in complex environments use trust ratings that are then associated with team performance, but the causal relationships remain unclear (Hoonakker et al., 2017; McNeese et al., 2019). These causal relationships are particularly complex when we consider how trust in automation mediates trust in other people, or trusting through automation (Jung et al., 2015; Malle et al., 2017). Framing trust in terms of these performance outcomes—reliance, compliance, and trust ratings—is helpful but insufficient for understanding how trust affects performance among interdependent agents, across the many layers of a sociotechnical system.
New Contexts For Trust in Automation
Automation has been defined as “the execution by a machine agent of a function that was previously carried out by a human. What is considered automation will, therefore, change with time” (Parasuraman & Riley, 1997, p. 231). Automation imbued with artificial intelligence and machine learning capabilities is supporting more interactive and social relationships with people (Allen et al., 1999; Breazeal & Scassellati, 1999; Castelfranchi, 1998; Knight, 2013; Wagner & Arkin, 2008). These advances reflect a widespread vision to implement automation in increasingly dynamic and complex work environments (Defense Science Board, 2012; Endsley, 2015; Executive Office of the President, 2016) and to use automation in more peerlike roles that qualitatively differ from supervisory control (van Wezel et al., 2011). Fulfilling these peerlike roles requires a rethinking of the qualities or behaviors that define automation performance and the frameworks used to understand trusting automation.
From Automation Supervisor or Subordinate to Interactive Partner
In supervisory control, human–automation performance depends on automation reliability, the human operator’s ability to assess the automation’s reliability, and to appropriately rely on, or comply with, the automation (Parasuraman & Riley, 1997). This supervisory arrangement tends to appear in well-established domains that benefit from the precise control of automation, such as industrial control systems. Such domains also tend to incur high costs when the automation fails, which is justification for keeping human experts in the loop. The reverse condition is when automation is used to monitor people—often frontline workers— thereby making them subordinates to automation. This arrangement has come as a consequence of computerizing or “informating” work environments (Zuboff, 1988), alongside the perception that organizations can gain control—and competitive advantage—by oppressing worker agency (Smith et al., 1992). As Zuboff (1985, p. 12) quotes a worker: “Are we all going to be working for a smart machine, or will we have smart people around the machine?”
Yet, these widely used hierarchical arrangements do not address the ambiguous and conflicting goals prevalent in complex work environments (Lewicki et al., 1998). In these environments, system success depends on active communication and coordination between participating agents (Sarter et al., 1997). These agents are more likely part of interdependent, networked relationships in resource-constrained environments that require negotiation, assurance, and cooperation—not just appropriate reliance—to resolve competing goals. These interactive relationships resist fitting neatly into the “types and levels of automation” categories that depict human–automation interaction as function allocation between people and automated systems (Parasuraman et al., 2000).
Several approaches to more interdependent work structures have been proposed, such as interactive function allocation (Pritchett et al., 2014; van Wezel et al., 2011), mixed-initiative interaction (Horvitz, 1999), coactive design (Johnson et al., 2014), interactive visual analytics (Sacha et al., 2016), and interactive machine learning (Amershi et al., 2014). These approaches envision automation working interactively with human counterparts, solving problems collaboratively, also referred to as “teaming” (Bartlett & Cooke, 2015; de Visser & Parasuraman, 2011; Zhang et al., 2015). Such teaming arrangements are typically deployed in complex environments where team goals may not always align with individual goals, risking human–automation breakdowns.
Designing trustworthy automation will be even more challenging as the scope of automation expands in safety-critical areas like healthcare, military, and emergency response, where the expectation for system efficiency is high and the tolerance for breakdowns is very low (Casper & Murphy, 2003; Defense Science Board, 2012; Robinette et al., 2013). Because safety-critical domains tend to have stringent requirements for technology reliability, breakdowns in these settings may have less to do with technology reliability and more to do with failures in goal alignment between units of an organization (Hall, 2003; Romzek & Dubnick, 1987). Therefore, given automation that functions as taskmaster, monitor, or influencer that can undermine human judgment, there is potential automation that promotes goal alignment through teamwork, and human agency through interactivity. Framing trustworthy automation in terms of reliability and reliance considers the known tradeoffs of supervisory control (Kirlik, 1993), but neglects the costs of goal conflict, how to resolve those conflicts, and how to provide trust assurance (Israelsen & Ahmed, 2019). Such conflicts may be frustrating when the costs of failure are trivial. In more consequential settings, such conflicts can degrade worker health and organizational resilience (Hancock et al., 2019).
Organizational Restructuring
The move toward more capable automation not only reflects societal needs in a wide variety of sectors, from healthcare to transportation; it also reflects organizational imperatives to gain advantage in competitive markets. The disaggregation of Tayloristic, hierarchical work structures of the Industrial Revolution, to the more interdependent, lateral work processes of the Information Age (Adler, 1997, Adler, 2001; Blomqvist & Stahle, 2004) led to achievements that were once thought impossible, like landing military aircraft on carriers at sea or reviving patients from deathlike states (Gawande, 2009; Rochlin et al., 1987). Although technological innovation was a crucial component of these achievements, these shifts also reflect increased coordination among human specialists. Recent innovations in automation seem poised to continue this trend, with automation rather than human specialists taking on roles that will require lateral coordination with other agents, including people (Frey & Osborne, 2013, Frey & Osborne, 2017).
Studies of highly reliable organizations and of human teaming in complex work environments show that the proficient use of social processes—such as trust—is essential to coordination, rather than relying on individual skill, static knowledge structures, or having well-defined roles (Cooke et al., 2013; Duhigg, 2016; Rochlin et al., 1987). In dynamic environments, top-down procedures or pressures that are far removed from the situation are less effective than they are in more stable environments. When prespecified controls (like standard operating procedures) are insufficient at reducing task uncertainty, work structures that allow for ad hoc coordination among agents are more effective (Cummings, 1978). Under these flexible work structures, in dynamic environments, coordination and cooperation typically emerge with trust playing a central role. Therefore, rather than calibrating trust to automation capabilities for appropriate reliance and compliance, these environments demand supporting a dynamic process of trusting automation for effective coordination through cooperation. As organizations flatten, the need to perform reliably and robustly will be joined by the need to coordinate dynamically and adeptly (Woods, 2015).
Flexible Systems for Resilience Require Cooperation
Alongside the flattening of organizations, there is also a shift toward more flexible and resilient systems to accommodate surprises and perturbations in the environment (Hollnagel et al., 2006). Resilience refers to a system’s ability to manage sustained adaptability in such environments. This differs from resilience as rebound, restoring a system to previous conditions before a disruption, or resilience as robustness, responding effectively to disturbances. Rather, resilience as sustained adaptability considers how interconnected agents within a network cooperate and draws on shared resources to accommodate surprises (Woods, 2015).
Decisions to cooperate in these networks are affected by different goals and priorities, such as the relative priority of individual goals versus group goals. Cooperative behavior is easiest to identify in actions that benefit a group despite individual costs (Dugatkin et al., 1992). This need for compromise, or reconciliation, applies to teaming as well as to groups of specialists coordinating within a traditionally hierarchical organization (Hall, 2003). Participation in these groups therefore involves coordination between private and public goals (Clark, 1996), self and collective interest (Ostrom, 2000), ego-centric and collaborative interests (Hoc, 2001), or local and global goals (Woods, 2005). These constructs (private, public…local, global) are historically and thus conceptually distinct, but they share the idea that cooperation emerges by reconciling myriad competing goals through social processes, like trusting.
Considering the requirements for cooperation and joint adaptation, increasingly autonomous automation is only part of the solution. Increasingly autonomous automation must also be increasingly responsive, to support a process of trusting. Responsive automation adjusts its goals and interaction strategies to the environment and to others’ shifting goals and intents. Automation responsivity—the degree to which the automation effectively adapts to the person and situation—will be crucial for preventing and recovering from breakdowns with increasingly autonomous automation. Responsive automation requires a relational perspective on the process of trusting that is the focus of this paper.
Trusting From Automation Responsivity
The term “responsivity” has been used to describe the input–output gain of a detector system, reflecting an ability to adjust to sudden, altered conditions in the environment and to resume stable operation. Responsivity captures the notion that automation could affect trust development through its responses to common ground variables. Common ground refers to the mutual knowledge, beliefs, and assumptions required to support interdependent actions in some joint activity (Clark & Brennan, 1991; Klein et al., 2005). This includes expectations for social responses, like collegiality.
As such, the traditional notion of reliability as a quality of automation may be supplemented and enveloped by the notion of responsivity. Whereas automation reliability influences reliance and compliance behaviors through trust, automation responsivity influences patterns of engagement and cooperation, through trust development. Friedland (1990) found that trust was promoted most often when one party demonstrated genuine responsiveness to the needs of the other party, not just due to the reciprocity of trust (trusting because one feels trusted), but also because of the strong contingency between the behaviors of those involved. Given these contingencies, automation designers should consider not only what information people need to appropriately trust automation, but also policies for people to explore its competence envelope, to adjust automation parameters, and to track and learn from norm deviations (Hall, 2003; Hoffman et al., 2013).
An example of designing for automation responsivity could be to consider how trust evolves as automation shifts roles over the lifespan of a relationship, for example, from a tutor to a conversational partner, or from a manager to a teammate (Marin et al., 2005). Such shifts could be due to changing needs of the person or the automation, which can be indicated through interactions. For example, a person’s requests for explanations might signal a lack of knowledge, or a lack of trust in a suggestion. If the former, the automation might assume a tutor role; if the latter, the automation might assume a conversational partner role. Responsive automation could also judge its competence and nudge people into different roles through social signals, such as gaze behavior (Jung et al., 2015). Shifting roles within a coordinative context can develop into trusting relationships through responsivity, to facilitate downstream outcomes like purchasing decisions or learning (Cassell & Bickmore, 2000; Liew et al., 2013; Miller, 2019; Traeger et al., 2020). Designing for responsivity avoids a zero-sum tradeoff between human control and automation autonomy, in which automation is optimized for competence in a discretized role, rather than for teamwork involving coordination and cooperation between roles (Bansal et al., 2020; Garbis & Artman, 1998).
To summarize, automation has become more sophisticated and autonomous, organizations are flattening and might capitalize on teams that include automated agents, but such teams must coordinate and cooperate in novel ways to support organizational resilience. These trends force a rethinking of the role of trust. Most research on trust in automation has focused on whether the automation was competent (i.e., reliable) and how this affects appropriate reliance and compliance behaviors. With more autonomous automation, the focus should broaden to consider whether the automation is coordinative (e.g., times its contributions well) and cooperative (e.g., negotiates goals effectively). Understanding how trust facilitates these processes requires refocusing on how automation responsivity affects trusting, and understanding how trust develops from interactions. Designing for system resilience requires thinking beyond people adapting to automation, or automation adapting to people, to include how people and automation promote mutual and sustained adaptation.
A Relational Approach to Trust
This paper takes a relational approach to trust. The term relational refers to how two or more concepts, objects, or people are connected, and can involve how two or more individuals or groups feel and behave toward one another. Therefore, what is relational is not always interactive, but what is interactive is likely to be relational. “Trusting” indicates an ongoing dialectic shaped by two or more entities, whereas “trust” suggests a static state that is reached. The Lee and See (2004) framework focused on information processing as the antecedent of trust, with reliance action as an ensuant of trust. This approach is useful for understanding perception and action in well-defined (narrowly scoped) human–automation tasks. However, it neglects the impact of evolving social situations in real-world contexts, including pressures leading to—or inhibiting—broader shared outcomes like cooperation.
A relational approach addresses this gap by focusing on the changing social contexts of repeated interactions within a goal environment and the influence that interacting agents have on one another. A conceptual model of relational trust is depicted in Figure 1, which focuses on dyadic exchanges, or interactions between two agents. This model does not address distributed trusting (Huang et al., 2020) or how trust and distrust spreads within a network through reputation or other mechanisms (Riegelsberger et al., 2005). Rather, this model focuses on dyadic exchanges to surface structural influences of trusting through interactions. Relational influences of interagent coordination and cooperation are easiest to explore through the simplest possible interaction unit—the dyad (Williams, 2010).
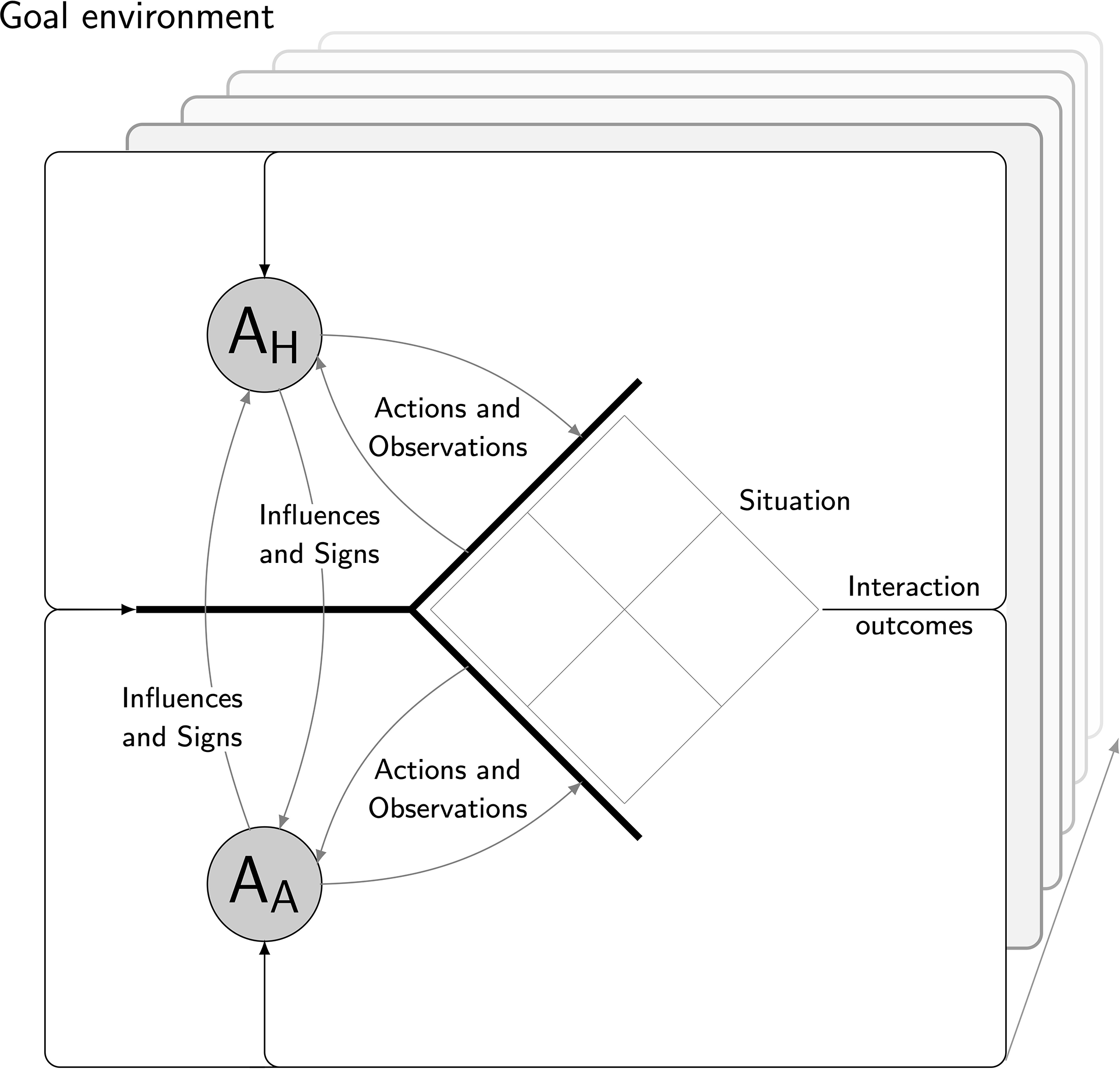
Trusting highly capable automation depends on social decision situations that are embedded in a goal environment. Trust evolves as a result of repeated human agent (AH) and automated agent (AA) interactions and the outcomes of those interactions over time. Fading in this figure depicts future situations.
However, dyads are embedded in broader organizational and societal contexts. In Figure 1, the goal environment reflects these broader contexts in which more concrete situations can be constructed. Therefore, the goal environment is somewhat amorphous until a context is introduced (e.g., the task, physical, and cultural context of operation), and includes the collection of possible social decision situations that could occur between two agents. The goal environment also includes metasituations, organizational and societal factors that affect how situations are constructed, and other goal-oriented agents like incidental counterparts (Inbar & Tractinsky, 2009), such as what patients are to physicians using electronic medical systems (Montague & Xu, 2012) or what pedestrians are to passengers of self-driving vehicles (Domeyer et al., 2020). Acknowledging the goal environment allows a focus on dyadic exchanges, without ignoring the broader context. Importantly, the goal environment can shape, and be shaped by, the trusting and interaction outcomes of the dyad.
Specifying that the agents are goal oriented does not mean they have internalized goals. It means that in observing the behaviors of the agents, we can attribute their actions, drives, or patterns of behavior to goals, motivation, or intent in a particular context—for sense-making (more Brooks, 1991; Bryson & Theodorou, 2019; less Hoc, 2001). People with agency and authority can be said to “have” goals, whereas automation goals reflect the implicit goals of their designers or developers. These implicit goals are made concrete in their choice of a cost function used to guide automation behavior, such as the cost of a “miss” versus the value of a “hit” in a classification task (Russell, 2019). More generally, the goal environment suggests a complex network of interacting agents driven by local and global goals. During these interactions, a person’s goals may transition between degrees of alignment and conflict with “the automation’s goals” depending on the situation and their resulting exchange. We further discuss these situations and how to define them in the next section.
First, we acknowledge that previous studies have approached trust relationally. These include studies of social situations that require trust (Castelfranchi, 1998; Riegelsberger et al., 2005; Thibaut & Kelley, 1959; Wagner & Arkin, 2011); studies of trust repair through apology or explanation (Kim et al., 2009; Tomlinson & Mayer, 2009; de Visser et al., 2018); studies of reciprocity resulting from and resulting in trust (Axelrod, 1984; Berg et al., 1995; Molm et al., 2007); and the idea that interactions themselves can engender trust, similar to the process of resolving cognitive dissonance and calibrating trust as a result of experience (Castelfranchi & Falcone, 2000; Cooper, 2007). More fundamentally, relational approaches to trust have framed it in terms of intersubjectivity, which describes how two people share an experience and are aware of sharing the experience (Tomasello & Carpenter, 2007). Interactions over time contribute to intersubjectivity, the tendency to anthropomorphize, joint intentions, and trust (Airenti, 2018; Fiore et al., 2013; Seemann, 2009). These examples that support a relational trust framework span multiple disciplines and none lead to a single integrative model. In this paper, we attempt to unify these relational approaches, which we summarize with four concepts.
Four Concepts of Trusting Responsive Automation
We present a four-concept framework of relational trust to help guide future research and system design: situation, semiotics, strategy, and sequence. To determine the specific social context in which trusting behaviors occur, we must first assess whether trust is necessary and to what degree it is necessary—the situation. We must also assess how signals during interactions affect trusting decisions—semiotics. To assess how trusting evolves, we must understand how situations transition and how patterns of interactions shape trusting—the sequence of interactions. Finally, to empower human actors and to shape patterns of interactions and outcomes, we must also understand how people and automation navigate within and between decision situations—strategy. The following sections describe each concept in detail.
Situation: Cooperation, Complementarity, and Control
A social situation is a concept from interdependence theory that defines the interdependence of a dyad. It describes when trust is needed to achieve a goal, where the misaligned goals of two agents could undermine cooperation, the degree of mutual influence (to what extent an agent has control over an other agent’s decisions), and how they contribute to the overall outcome (Thibaut & Kelley, 1959). For automation design, situations are powerful because they can be constructed within a goal environment, to enable control of interactions, to engender trust, or to allow for one agent to probe the trustworthiness of the other.
Formalized situation structures are typically represented as discrete event matrices that serve as proxies for social reality to which cognitive processes must be adapted (Holmes, 2004; Thibaut & Kelley, 1959). These structures can be used in algorithm development (Wagner & Arkin, 2011) and as frameworks to assess the situation, based on the reward structures of the goal environment (Wickham & Knee, 2012). In its simplest form, a situation structure specifies the choices available to each actor in a dyad, the outcomes of their choices, and how those outcomes depend on the choices of the other agent. Figure 2 shows these elements of a situation structure to indicate where trust is involved in decisions.
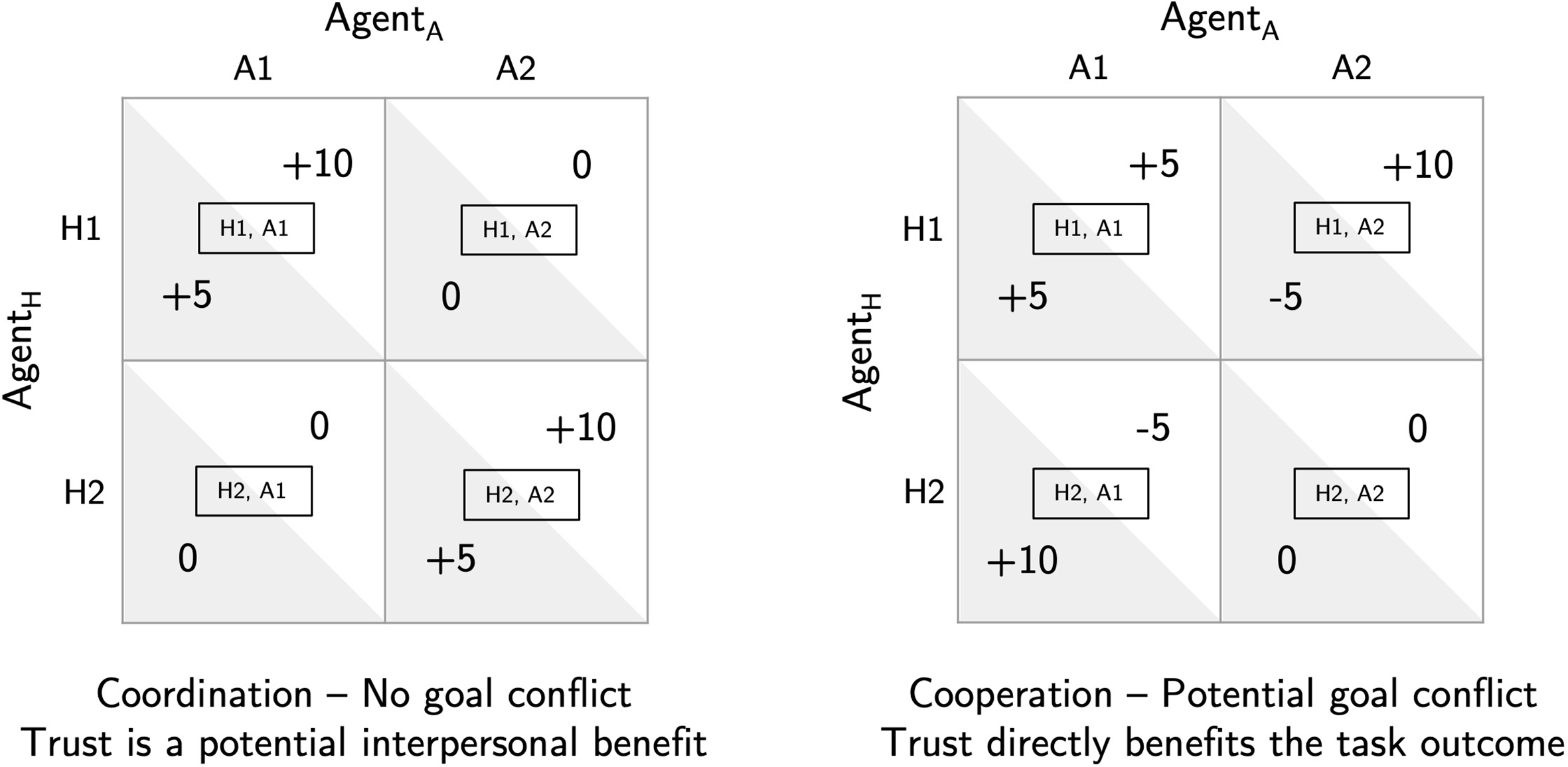
Trust plays a role in both coordination and cooperation situations; for coordination, the benefits of trust are interpersonal and affect longer-term relationship outcomes (e.g., collegiality), whereas for cooperation trust directly affects the immediate decision outcome.
The matrix on the left (Figure 2) shows two agents with a common goal, but the best outcome depends on AgentH and AgentA arranging their behavior such that both choose the same option [H1, A1] or [H2, A2], that is, coordination. The matrix on the right shows a goal conflict, indicating that trust is needed (in this case, trust that the other agent will not choose to defect) for both parties to avoid negative outcomes, that is, cooperation. Therefore, coordination is about the timing or arrangement of joint decisions, whereas cooperation is about negotiating and aligning individual goals when they differ from the joint goal. Negotiating goals to cooperate—by way of trust—has different outcomes compared to coordination. Importantly, situation structures indicate which decisions require negotiation.
The concept of situation structures departs from previous approaches to trust in automation. Such structures focus not just on a person’s perceptions of the automation’s characteristics (the information processing view); they also highlight the interdependence of trust, including the attributions and expectations of another agent’s intentions, motivations, and goals when deciding one’s own goals or actions. Even in studies of reliance and compliance, situation structures can help explain cases in which an operator’s performance changes the value of an alarm or alert. For example, a skilled operator’s actions may result in lowering the probability of an alarm. Trust in these cases would depend not only on perceived information about the automation, but also on the probability of an alarm, a value that reflects the operators’ actions rather than the automation’s independent performance (Meyer & Bitan, 2002). Approaching trust as a relational concept captures this interdependence.
A focus on the trust situation also reveals when trust calibration matters. Trust calibration—aligning a person’s trust with the automation’s capabilities—is often described as a prerequisite for superior human–automation performance (Lee & See, 2004). However, conflicting results show that trust calibration alone is not sufficient for superior performance (McGuirl & Sarter, 2006; Merritt et al., 2015; Zhang et al., 2020). The situation structures show that when the performance profile of the person and the automation are highly correlated, trust calibration does not matter (Zhang et al., 2020). More generally, the situation structure indicates that it might be appropriate for people to rely on automation, even when it performs worse on a task than they would, because relying on the automation enables them to shift attention to a more important activity. The situation structure encourages an analysis that considers reliance in a broader sociotechnical context.
Situations that involve trust
Trust mediates situations of uncertainty and risk based on the actions of others. The Atlas of Interpersonal Situations (Kelley et al., 2003) is a starting point for identifying situation structures involving trust. In the classic Prisoner’s Dilemma situation, to maximize both individual and communal gain, each prisoner must trust that the other will adhere to their original promise—to remain silent in the face of police questioning. Maximizing both individual and communal gain therefore demands interagent trust, and the decision outcomes are shaped by the situation. However, previous work has argued that the synchronous, symmetrical structure of the Prisoner’s Dilemma—in which two agents have the same choices and must make their decision at the same time—is less likely to occur in the real-world compared to asynchronous, asymmetrical structures like the Trust Game (Riegelsberger et al., 2003). Nevertheless, these trust situations point to very different forms of risk and uncertainty than typify supervisory control situations where automation reliability dominates. Trust situations involve risk that a partner will focus on individual gain rather than communal gain, and that the other will assume the same of their partner and behave accordingly, by preemptively defecting (Riegelsberger et al., 2005). Potential for these interactional risks is revealed in the situation structures.
Other examples of trusting situations for human–agent joint action include negotiated and reciprocal exchange structures (Molm et al., 1999, Molm et al., 2006). In negotiated exchange, neither agent can obtain a benefit without first agreeing explicitly. Most economic exchanges fit this category, as do many social exchanges, such as receiving a service or product for payment, or deciding to divide household chores. In reciprocal exchange, agents’ contributions are separately performed and are not negotiated. Because of this, the benefits of an action can be one-sided, with no guarantee of a return. This places an agent in a vulnerable position, at risk of incurring a loss, and also becomes an opportunity for a partner to demonstrate trustworthiness by returning a beneficial act. Such opportunities to demonstrate trustworthiness may be crucial in the development of trust (Molm et al., 2000; Simpson, 2007). As interactivity and interdependence between people and automation increases, situation structures raise new questions about trust and control that go beyond reliability and information transparency.
Control in situations
The control that agents have over one another and over a joint outcome has important implications for trust. Friedland (1990) found that perceived control over a partner’s actions reduced uncertainty and lowered perceived risk of exploitation, which facilitated cooperative responses in a prisoner’s dilemma-type game. Conversely, Sweeney et al. (2009) found that the level of perceived trust between a supervisor and subordinate determined the amount of influence each actor was willing to accept from the other. Taken together, these findings echo the idea that trust and control have a dialectic link (Castelfranchi & Falcone, 2000), and that control is not simply an indicator of distrust.
By its strict definition, trust implies a willingness to relinquish control, but control can build trust over time or can shift the locus of trust to the control itself. For instance, managerial strategies that foster psychological safety could be considered forms of control (Lowry et al., 2010; Zhang et al., 2010), as are oversight structures like independent consumer-advocacy groups that support trust in a system (Shneiderman, 2020). At a more granular level, the embodied interactions of people moving together establish trust, not based on observation, but based on joint control and shared experience (Seemann, 2009).
The aim to minimize human control is apparent in the race toward increasing automation autonomy (Endsley, 2015; Parasuraman et al., 2000). However, giving complete control to automation is either infeasible or undesirable in complex environments, assuming a need for the system to adapt often and quickly to changing circumstances. Past research has reported on the challenges that people face as backups for automation designed to eliminate human control. In this role, people transition between “manual” and “automatic” control, even though most systems have many modes and levels of control (Degani et al., 1999; Sarter & Woods, 1995). These modes and levels of control are often defined by what is technically feasible, and not by the types of control that promote human agency or system resilience (Gallotti & Frith, 2013; van der Wel, 2015), for example, by making automation directable (Bradshaw et al., 2004). Directable automation like interactive machine learning gives people control of automation goals, outcomes, and even how it learns (Amershi et al., 2014). Therefore, automation that is responsive to human control goes beyond enabling human backups; it must also support the process of trusting.
Promoting human agency—our ability to affect objects, artifacts, and our environment—affects trusting. For example, the act of customizing a product can add perceived value to the product beyond its traditional utility (Groom et al., 2009; Mochon et al., 2012). Such experience-related benefits derived during interaction can also lead to increased engagement, as measured by positive trust ratings, use, or consumption (Atakan et al., 2014; Dohle et al., 2014; Gutzwiller & Reeder, 2020; Trentin et al., 2014). This suggests that designing systems to support human agency—and our ability to influence automation—may be circularly linked to increasing the influence of automation through trusting.
Despite initial work in this area, there remain many open questions regarding trust, control, and influence as it relates to automation design. How might designing complementary human and automation performance profiles improve joint performance? Does automation that threatens a person’s sense of agency undermine their trust in automation, irrespective of the automation’s performance? Would augmenting a person’s sense of agency, by increasing their control, also increase their trust in automation? Can an alternate framing of types and levels of control avoid a zero-sum tradeoff between automation autonomy and human agency? What types of interaction help align automation and agent goals? Questions like these may be addressed by first identifying the situation and its interdependencies, and then, understanding the semiotics involved.
Semiotics: Revealing Capability and Aligning Intent
Semiotics is the study of how meaning is formed through signs, which unite the signifier (what is perceived) with the signified (the concept communicated; Flach, 2017; Sebeok, 2001; de Souza, 2017). Semiotics helps to explain how people construct meaning from interactions with automation and representations of the automation, which guides and is guided by the process of trusting. Signs of trust, or trust-related information, can be encoded as symbols and names; icons and indexes; symptoms and signals. Symbols include emblems, badges, or certifications that represent extrinsic assurance of trustworthiness, as with software certification. Names designate instance as a member of a larger class and can reflect role and function. Icons and indexes encode in an analog fashion through resemblance or location in time and space. In contrast, symptoms and signals are intrinsic indicators of trust that are incidental to the interaction (Riegelsberger et al., 2005). Symptoms result from a physical process and can demonstrate competence, intent, and motivation. Symptoms and signals underlie how people assess and demonstrate compliance with cultural norms (Parasuraman & Miller, 2004) and how people infer intent from actions (Chiou & Lee, 2016; Chiou et al., 2019; Cooke et al., 2013). Signals are often emitted unwittingly but can be produced wittingly (Sebeok, 2001). For example, in a collaborative task, robot motion is a symptom or signal that can be designed to communicate intent, by exaggerating movements, or to convey competence, by moving smoothly and predictably (Dragan et al., 2013). Symptoms and signals support more resilient performance because they reflect intrinsic qualities of the immediate operating context.
People’s perceptions of automation qualities and behaviors have long been the focus of understanding trust (Hancock et al., 2011; Schaefer et al., 2016), particularly how visual representations affect the analytic and affective interpretation of trust signs (Lee & See, 2004). The interpretations of these signs change fundamentally when moving from teleoperation (Sheridan & Verplank, 1978) to more complex automation that enables—or is enabled by—perceived agency and associated social cues (Takayama, 2009). These social cues act as symptoms and signals whether or not the automation was designed to produce them (Epley et al., 2007; Mutlu et al., 2012; Szafir et al., 2015). Furthermore, the strength of social cues depends on the task context. For example, proxemic behavior (use of physical space) strongly affects a hallway navigation task, and direction of eye gaze strongly affects an object handoff task (Fiore et al., 2013; Mutlu et al., 2012). Designers should consider both instrumental and communicative aspects of automation behavior; yet, understanding what symptoms and signals are available and how they are interpreted in different contexts remains an understudied area.
Contrasting a focus on individuals observing automation, a relational approach would argue that either agent can generate and respond to symbols and symptoms of trust. A person might probe automation to better understand its behavior, which can itself signal uncertainty or a lack of trust. Even with different propensities to trust, a period of unconditional, message-consistent behavior immediately after a message can make low trusters responsive to cooperative messages, and high trusters responsive to competitive messages (Parks et al., 1996). Actions signal information about an agent’s value system or the choices of action available to the agent, and can suggest unilateral progress independent of explicit agreements (Clark, 1996; Schelling, 1960) because actions commit where speech and symbolic meaning cannot. Such actions are therefore epistemic—they serve to communicate meaning and to enhance responsivity, not just to achieve a goal. Other non-goal-directed actions such as mimicry, and coordination without obvious cooperation, can indicate engagement in joint activity and being in tune with the other (Riegelsberger et al., 2005; Tomasello & Carpenter, 2007). Such actions, whether or not they are intentional, helps to establish common ground (Clark & Brennan, 1991).
Not just performance and process: Revisiting purpose
Past research has shown that observable information about an automation’s performance, process, and purpose influences trust in automation (Lee & Moray, 1992; Lee & See, 2004). There is substantial evidence that performance and process information continue to be important for trust (Hoff & Bashir, 2015; Lee & See, 2004; Madhavan et al., 2006). However, purpose is often presumed to be aligned in supervisory control arrangements. In more lateral arrangements, individual and team goals might diverge. Therefore, signals of aligned purpose become more crucial for trust (e.g., in workplace communication; Dabbish & Kraut, 2004; Hudson et al., 2003; Wajcman & Rose, 2011). However, signals of trust are only effective when they are interpreted as signals of trust (Berg et al., 1995), and thus their efficacy may depend on how well the designer’s intent is communicated.
Communicating intent, a willingness to seek common ground, and a willingness to reconcile misaligned goals are other roles of signals (Clark & Brennan, 1991; Klein et al., 2005). Reconciliation through interactions—whether through adaptation, adjustment, alteration, accommodation, or assimilation—involves confirmation of shared perspective and purpose that make the common goals and values salient. Signals of shared purpose can help a person accept—rather than try to alter—their partner’s goals, and may involve acting according to what “we” can do rather than what “I” can do (Sebanz et al., 2006; Tsai et al., 2011). This “we-mode” (Gallotti & Frith, 2013) representation can align goals and promote cooperation in situations where individually rational actors might otherwise distrust one another (Colman et al., 2008). In this way, interactions can go beyond signals of individual purpose toward signals of shared purpose, that lead to a change in individual goals. A willingness to change one’s goals, to seek common ground, and to act in the interest of shared purpose, may further communicate a member’s trustworthiness in teams plagued by imperfect goal alignment.
Attributing intent from signals
Closely related to signals of shared purpose is the phenomenon of people attributing goals and intents to objects or nonliving things. A driver and a driver-assist steering algorithm may “share” the goal of getting the driver to a destination safely and efficiently, but because driving is a complex task, there is potential for perceived goal conflict at the task level. When the driver edges toward an adjoining lane to signal a lane change to other drivers, the driver-assist’s resistance to deviations from the lane’s center (a conflict of intent) may lead to perceived goal conflict. Given this potential for conflict in lateral control arrangements, the line between signals of purpose and signals of performance may be more blurred than with traditional supervisory control automation. If perceptions of automation performance are strongly influenced by its predictability, then perceptions of automation intent could be clarified by designing for legibility—for its actions to reveal its intent (Dragan et al., 2013).
The phenomenon of people attributing social qualities to nonliving entities has been extensively studied, and will not be belabored here (Epley et al., 2007; Heider & Simmel, 1944; Nass et al., 1994; Weiner, 1985). Attributing humanlike characteristics, like having specific intentions, to movements in abstract figures, gives meaning to a series of events that would be otherwise arbitrary. This reduces feelings of uncertainty and provides a more connected picture of reality. Just as carefully tuned dynamics of animated characters can be used to convey intent and emotional state (Lasseter, 1987), carefully tuned dynamics of automation can indicate its goals and capacity (Alsaid et al., 2020). Because of this, automation with multiple signaling modalities (e.g., voice combined with physical movement) could enhance the attribution effect, further creating an environment in which signals of purpose affect trusting more than signals of performance or process.
From transparency to directability and collegiality
Considering the semiotics of automation, it would be remiss to ignore transparency, an umbrella term that at times refers to performance, process, and purpose information about automation, and at other times refers to just one of these dimensions. Transparency seeks to make trust-relevant information visible, but has had an inconsistent relationship with trust ratings, particularly when operationalized as process or performance information. A study of an art recommendation system (Cramer et al., 2008) found that providing people information on how a recommendation was made (i.e., process information) led to increased acceptance of recommendations; however, trust ratings did not increase. Providing the level of system certainty (i.e., performance information) did not affect people’s acceptance or trust ratings. However, an adaptive cruise control study (Verberne et al., 2012) found that showing process information while taking over a driving task led to higher ratings of trust than a system that did not show this information. Transparency led to increased trust ratings only when the automation’s goals matched the participants’ goals. Transparency in the form of purpose, process, or performance information can lead to higher trust (Selkowitz et al., 2015), but not consistently—and to better joint performance, but not consistently (Zhang et al., 2020).
The reasons for these inconsistencies are complex (Israelsen & Ahmed, 2019; Miller, 2014). One overarching reason is the inherent conflict in delegating and granting autonomy and also completely understanding the delegated activity. The concept of intent frame resolves this conflict by redefining transparency from indicating how the task is done to whether it can be done. The intent frame specifies goals, plans, constraints, stipulations, and values. The ideal behind transparency is not simply to provide information, but to provide the necessary information to make an appropriate judgment within a given situation—hence the need for semiotics.
For example, in automated decision support, the automation’s performance across a test set of instances can be viewed as a symbol assuring satisfactory performance and a reference for trust calibration. However, a more relevant indicator is the probability of correct advice on a given instance. Such an indicator can help the human decision-maker adapt to the contours of the automation’s error profile or operational domain (Zhang et al., 2020). However, this also requires well-calibrated automation, which is not always possible. A more robust solution might be to provide explanations or visualizations that show what influenced the decision, although many nonexperts find these unhelpful (Zhang et al., 2020). Semiotics takes a more relational approach to concepts like transparency. A relational approach suggests that good explanations benefit from being framed as a conversation, or dialogic interaction, and not just a statement or visualization that shows the basis of the decision (Ananny & Crawford, 2018; Miller, 2019).
In that vein, two important corollaries of transparency may be automation directability and collegiality. Directability concerns how well the automation accepts signals from the person to adjust its behavior (Christoffersen & Woods, 2002; Johnson et al., 2014). Directable automation can accept strategic guidance, facilitated by aligning the automation with how people approach the task, such that the automation is intrinsically interpretable (e.g., a simple decision tree, rather than a neural network-based system that requires explanation; Rudin, 2019). Interpretable automation is intrinsically more transparent, but it also makes accessible points of leverage for directing the automation—people can see a threshold of a decision tree, adjust it, and see the consequences.
Automation collegiality goes beyond directability, by being responsive to the state of the person and activity. Unlike directable automation, collegial automation actively monitors the situation and is sensitive to signs and symbols generated by the person, in service of eliciting trust, repairing trust, and facilitating cooperation. This involves earning trust at the start of the relationship and when new situations are encountered. It also involves monitoring the trust of the partner and repairing and tempering trust. Doing so facilitates cooperation (and goal alignment) by adjusting to meet the partner’s goals, negotiating to arrive at new goals, or nudging a partner to adopt different goals. Collegiality implies that the automation can initiate building, repairing, or tempering trust, and that the person can also initiate these activities. For example, the automation can offer an apology after a period of poor performance, the person can ask for an explanation, or the automation can justify its action. Responsive automation is collegial—not only is it directable, but it can also be directive by adjusting people’s goals and guiding their behavior.
Automation collegiality should be advanced, alongside increasingly autonomous automation, which has greater potential for goal conflict with human counterparts (Lewicki et al., 1998). Instead of monitoring for errors and responding to warnings, in complex environments people will be subject to misaligned goals, perceived or real, as they work alongside automation whose capability depends on a changing environment. Semiotics can help explain why and how people derive meaning from signs, and how these signs affect the process of trusting automation. An important challenge is to create coherent signs between people and automation by coordinating: symptoms and signals; icons and indexes; and symbols and names. Signs bring meaning in relation to each other through their relationship within and across interactions. To capture the formation of meaning across interactions, and patterns of action that follow certain signs, the temporal element of the relational trusting framework is specified by the interaction sequence.
Sequence: Timing, Initiative, and History
Sequence reflects the timing and order of interactions between two or more agents, whether decisions are made synchronously, asynchronously, in a particular order, or in free form. Sequence complements situation and semiotics; it is the order of actions, signals, and events that influence subsequent actions, signals, and events, as in hysteresis, path dependency, and behavioral lock-in (Barnes et al., 2004). The sequence of interactions defines coordination, and agents that coordinate poorly are likely to be distrusted.
The type of sequence can affect trusting and performance. For instance, a synchronous sequence of interactions (decisions and actions that occur in parallel) may force partners to rely on affective trust, rather than analytical trust, because they have less time to seek out signs to confirm or disconfirm the partner’s trustworthiness, before a decision or action must occur. An asynchronous sequence of interactions (decisions and actions that occur serially) may rely more on past actions or signs, given that its temporal structure allows for a separate analysis of trust and acting trustworthy (Riegelsberger et al., 2003). The initial act or default state of automation may disproportionately affect a person’s decisions, compared to subsequent acts or states, even for high-consequence choices such as retirement savings and organ donation (Goldstein et al., 2008; Johnson & Goldstein, 2003). Defaults have a strong initial effect on interactions and may have a lasting influence on the relationship that develops.
Little is known about the costs and benefits of different interaction sequences on trust. For example, automation that relies on a person to initiate interactions may see reduced use during high workload situations (Chiou & Lee, 2016), which bodes poorly for developing trust through shared adversity (Bastian et al., 2018). On the other hand, automation that always initiates interactions may lead to higher complacency and reduced engagement in a shared task. Interestingly, social robots that took initiative were more trusted when engaged in a service task, rather than small talk (Babel et al., 2021). These findings indicate that sequence matters for joint performance, but that its effect depends on the task (i.e., the situation).
New architectures of interactive agents enact sequences such as turn-taking (e.g., chatbots, Siri) or a pseudorandom order that depends on context (e.g., autocorrect during texting, in-vehicle automated safety features). One approach to interactive human–robot coordination represented the sequences as a Markov decision process that included a representation of the task, the cost of communication, and a model of the human response (Unhelkar et al., 2020). These sequences may engage participants more in the shared task of composing a message, or navigating a roadway, but can crowd out other important tasks in fast-paced settings, such as attending to changes in the goal environment (Lee, 2009).
Transition lists define the sequence of situations
Sequence also addresses potential movement between situations and how agents move from a previous situation to a new one with different choices and outcomes (Rusbult & Van Lange, 2003); i.e., a transition list (Kelley, 1984). More concretely, when two choices and two outcomes are specified for each agent in a dyad, this corresponds to the 2 × 2 situation structure (e.g., Figure 2). When a further consequence of each combination of choices is also specified, and a particular combination of behaviors is enacted, a transition list is defined. Transition lists assume that the agents are interdependent not only in how they control their own and each other’s immediate outcomes but also in their movement through situations. Therefore, interdependence can be evaluated at different time scales. Over time, repeated interactions between the same parties or extended situations (Rusbult & Van Lange, 2003) evolve into patterns, which then define relationships (Figure 3). Such relationships may make a habit of trusting (Neal et al., 2006), which has different properties from initial trust or swift trust (Meyerson et al., 1996).

Interacting time scales from interactions (“I”), influenced by (perceived) intents and signals; that lead to situations (“S”), defined by goals and actions; which together define relationships (“R”), formed by trust frames and social norms.
Interactions across situations that combine to form relationships affect trust in a manner that is not simply based on learning or accumulation of trust-relevant information. Some models describe trust evolution in terms of accumulation; trust increases and decreases according to the occurrence of positive and negative outcomes of a sequence of situations (de Visser et al., 2020; Gao et al., 2006). These approaches typically treat people as passive recipients of trust-relevant information.
An alternate view treats trust as an active sensemaking process guided by a trust frame (Fallon et al., 2010). The trust frame helps form and define relationships, guides what information people seek, and how they interpret this information. A trust frame associates qualitative (categorical) difference with high or low levels of trust. For example, one trust frame is the “perfect automation schema” (Dzindolet et al., 2002; Lyons & Guznov, 2019), and this would lead people to place less weight on poor automation performance and use good performance to sustain the “perfect automation” frame. Algorithm aversion is the opposite trust frame that leads people to overweight poor performance (Dietvorst et al., 2014; Prahl & Van Swol, 2017). The most extreme trust frame might be one of suspicion where people view automation as antagonistic. An ambivalent trust frame that reflects unfamiliarity with the automation might lead to more information seeking and experimentation. Other frames include “cooperation threshold” and “limit of forgivability” (Han & Schulz, 2020). Changing frames requires effort and expertise and so once adopted a frame persists (Klein et al., 2006).
Because trust frames are persistent, and because they guide information seeking and interpretation, the same outcome of an interaction within a particular sequence might have very different consequences for the accumulation of trust. Models of trust evolution might be improved by modeling transitions between trust frames and conditioning the accumulation of trust on the trust frame. Likewise, responsive automation might benefit from using frames to guide its estimate of trust, to not just calibrate trust, but also to reframe trust, such as prompting people to exert a little control over the automation to counteract algorithm aversion (Dietvorst et al., 2018).
Trusting over time
Sequence plays an important role in trusting because trust is history dependent (Meyerson et al., 1996). Therefore, when tensions or imbalances in complex environments are resistant to quick and simple resolutions, sequence affects relationships (Lewicki et al., 1998). Sequence also captures how stages and changes in relationships depend on interaction patterns that affect trust, such as reciprocity (Gottman et al., 2002). Reciprocity, or “the giving of benefits to another in return for benefits received,” is defined by a particular sequence of actions. An act of reciprocity has instrumental value as well as communicative or symbolic value, and through a history of interactions, can reinforce trust frames (Berg et al., 1995; Molm et al., 2007).
Sequence makes sense of the maxim “trust, but verify,” which seems paradoxical under a strict definition of trust. A strict definition posits that a situation with verification has no vulnerability, and therefore cannot involve trust. But the implied sequence of the maxim indicates that we first decide to trust, and then verify this decision (which then informs our initial trust). The timing and consequence of each step determines the degree of vulnerability—a reversible step leads to less vulnerability. This concept of sequence is what underlies the dialectic link between trust and control (Castelfranchi & Falcone, 2000) and supports the idea that trust is more like an attitude (Lee & See, 2004) rather than an intention or behavior (Israelsen & Ahmed, 2019; Mayer et al., 1995). People may intend to cooperate, and so they first behave cooperatively, but if complete verification in a situation is impossible, their trust attitude (influenced by their beliefs) remains skeptical. Without the option to verify, one may instead probe to gain more knowledge about the other agent or situation or influence the structure of the situation itself. The broader framing of trusting suggests an alternative maxim of “trust, probe, and influence.”
Whereas enabling people to probe and influence automation engages a person in trusting, trust repair engages the automation in re-developing trust. Trust repair describes the process of interacting with the person to recover trust rather than simply signaling purpose, process, and performance information (Lee, 2020). In this process, automation is responsive to the sequence of events and presents information to demonstrate that it is trustworthy (Kim et al., 2009; Tomlinson & Mayer, 2009; de Visser et al., 2018). This involves extrapolating past experiences, evaluating the present experience, and projecting future outcomes—or to explain, show, and promise (Emirbayer & Mische, 1998; Kohn et al., 2018). These elements of trust recovery—explain, show, and promise—can convey the locus of causality (e.g., an external event versus an internal event), degree of control over the situation, and stability of the cause (Tomlinson & Mayer, 2009).
Responsive automation should also engage in the complement to trust repair—trust tempering. Trust tempering provokes the person to consider situations where the agent is most vulnerable to error, the behaviors that the agent should display if it is operating correctly, and behavior that is inconsistent with the situation (Petersen, 2008). Trust tempering requires active monitoring for when the agent performed well but failure was likely, then explaining why it might be wise to avoid relying on the automation in such situations in the future. Others have described a similar intervention, trust dampening, which focuses on lowering trust so that it is better calibrated (de Visser et al., 2020). The difference is that trust tempering is not simply focused on improving calibration, but on making trust less brittle by moderating expectations when the automation encounters a similar situation. In combination, trust repair and tempering provide an interactive means of calibrating trust across a sequence of situations.
Sequence length affects trusting decisions
When agents expect to interact again in the future, they tend to adopt trusting behaviors (Friedland, 1990). Therefore, the horizon of a sequence, or the expected length of time over which interactions will occur, can affect decisions to choose trusting actions over distrusting actions. Such decisions have tactical significance depending on the horizon’s length or certainty, which is why one strategy to encourage cooperation is to extend the interaction sequence (Axelrod, 1984). This increases the chance that agents will interact again, which increases the impact of reputation from past decisions. Although the initial situation strongly affects trust at the start of a sequence, the intrinsic properties of an agent, such as its values or ethics manifested as its reputation, may come to dominate as the sequence continues (Riegelsberger et al., 2005).
Very little is known about how the time horizon affects human interactions with automation because few studies include time horizon as a variable. However, developing an automation’s reputation through branding (Celmer et al., 2018) may be one way to signal a longer time horizon. Hill (1990) argued that an actor’s reputation was important for shaping the willingness of others to enter into an exchange with an agent, with reputation being the result of repeated trustworthy behavior. Reputation can also affect decisions in asymmetric situations, with asynchronous interactions, where concurrent signals are unavailable and trust depends more on historical information (Riegelsberger et al., 2003). Interacting agents may thus adapt their decision strategies to the expected type and length of the interaction sequence.
Strategy: Navigating Situations
Strategies describe a series of actions, norms, or policies that control interactions to achieve a desired goal. In trusting automation, strategies may include enacting policies that are known to generate cooperative outcomes over time, changing the outcome values of a situation to test an agent’s trustworthiness, or leveraging factors in the goal environment to create a new situation. Some strategies rely on a particular sequence of actions, such as tit-for-tat, a well-known cooperative strategy that also avoids exploitation (Axelrod, 1984). Other strategies can be implemented by specifying a cost function from which coordination and cooperation can emerge, such as assistance games (Fickinger et al., 2020; Sadigh et al., 2018; Woodward et al., 2020). Shared strategies between interacting agents are typically agreed-upon ways of achieving goals that may involve resource tradeoffs.
What differentiates strategies from other patterns of action is that strategies are goal oriented. For example, there may be strategies that are primarily used to reduce the costs of obtaining, processing, and communicating information between two or more agents working together (e.g., Miller et al., 2005; Sadigh et al., 2018). Strategies that can reduce these costs are critical for the performance of knowledge-based organizations (Arrow, 1974), but the success of such strategies depend on trust, to avoid the costs of information verification at every step. A central challenge with enacting cooperative strategies is that an agent working to enhance the resilience of an organization (e.g., Stephens et al., 2011) might perform poorly individually, potentially undermining initial trust in that agent. When executed successfully, however, such strategies can further facilitate trusting.
Designing strategies
Not all strategies will be known and agreed upon in advance. One way for a person to grasp the situation and to determine their subsequent strategy is through the information exchanged during interactions (Engström et al., 2018; Picard & Friston, 2014). Actions that perturb the environment and provoke a response from another agent can generate new information (Flach et al., 2013; Sadigh et al., 2018). The other agent’s actions can subsequently reveal the situation structure, goal alignment, and the agent’s likely strategy (Becchio et al., 2010; Rusbult & Van Lange, 2003). Patterns of interactions that emerge and are shown to be successful may then be codified as strategies for future use.
Successful strategies in human–agent interaction require considering the cost functions of the interacting agents, within and across situations, and how one agent’s actions may provoke a response from the other. For example, an autonomous car that reverses at a four-way stop may prompt a human driver to proceed first through the intersection (Sadigh et al., 2018), trusting from the signal that the autonomous car will not proceed forward at the same time. Another strategy may be to probe agents to clarify their underlying utility parameters, like their style of coordination or level of attention. Strategies that anticipate another agent’s behaviors, even imperfectly, can lead to more efficient and communicative behaviors in the long run.
These examples capture how mutually beneficial strategies can emerge from the interdependencies of joint action. The combinations of actions that define a strategy within a goal environment may be as vast as the number of situations encountered. However, a smaller number of prototypical patterns may be initially discerned through field studies (Domeyer et al., 2019; Riegelsberger et al., 2003; Stephens et al., 2011), dyads under controlled conditions (Chiou & Lee, 2015; Sadigh et al., 2018; Williams, 2010), or through agent-based modeling (Smith & Conrey, 2007). Studies of emergent behaviors, and the conditions in which they are most successful, can help to define strategies for future system design and planning.
Strategies for trusting
Certain strategies may be invoked depending on the level of trust between entities. In low-trust situations, generating or navigating into strain-test situations may evolve trust or determine the trustworthiness of a partner. Strain-test situations are structures in which an agent is “highly outcome dependent on [a] partner, but the actions that would promote the agent’s own interests differ from those that would benefit the partner” (Simpson, 2007, p. 264). If a partner were to help another agent even though it incurs some cost to the partner, then the agent should trust the partner more. Strain-test situations may therefore be used to reduce uncertainty in a relationship, from having confidence in a partner’s general predictability, to having confidence in the partner’s pro-relationship values, goals, and intentions (Holmes & Rempel, 1989).
When there is uncertainty regarding the trustworthiness of a potential partner, or when trust is absent altogether, other strategies may be invoked, especially if the time horizon is long. Ostrom (2000) used the sequential Prisoner’s Dilemma game to describe the role of trust in a mixed population of rational egoists (agents that do not value reciprocity) and conditional cooperators (agents that cooperate only if the other cooperates). With complete information, only those that were trustworthy would survive in an evolutionary process; conditional cooperators received higher payoffs more frequently, whereas rational egoists received lower payoffs because others would not trust them. However, with no information about agents in a relatively large population, preferences evolve so that only rational egoists survive (Axelrod, 1984; Ostrom, 2000). Cooperative outcomes are therefore enabled by strategies that facilitate mutual trusting, whereas appropriate trust depends on knowledge of an agent’s strategy, as revealed by its actions. Future work would benefit from connecting situation, semiotics, and sequence in human–agent interactions that promote effective strategies for trusting.
An Integrative Framework for Trusting Automation
Although situation, semiotics, sequence, and strategy are concepts that can vary independently, they are also interrelated. Figure 4 expands on Figure 1 to show how these four concepts relate to one another and how they influence trusting.
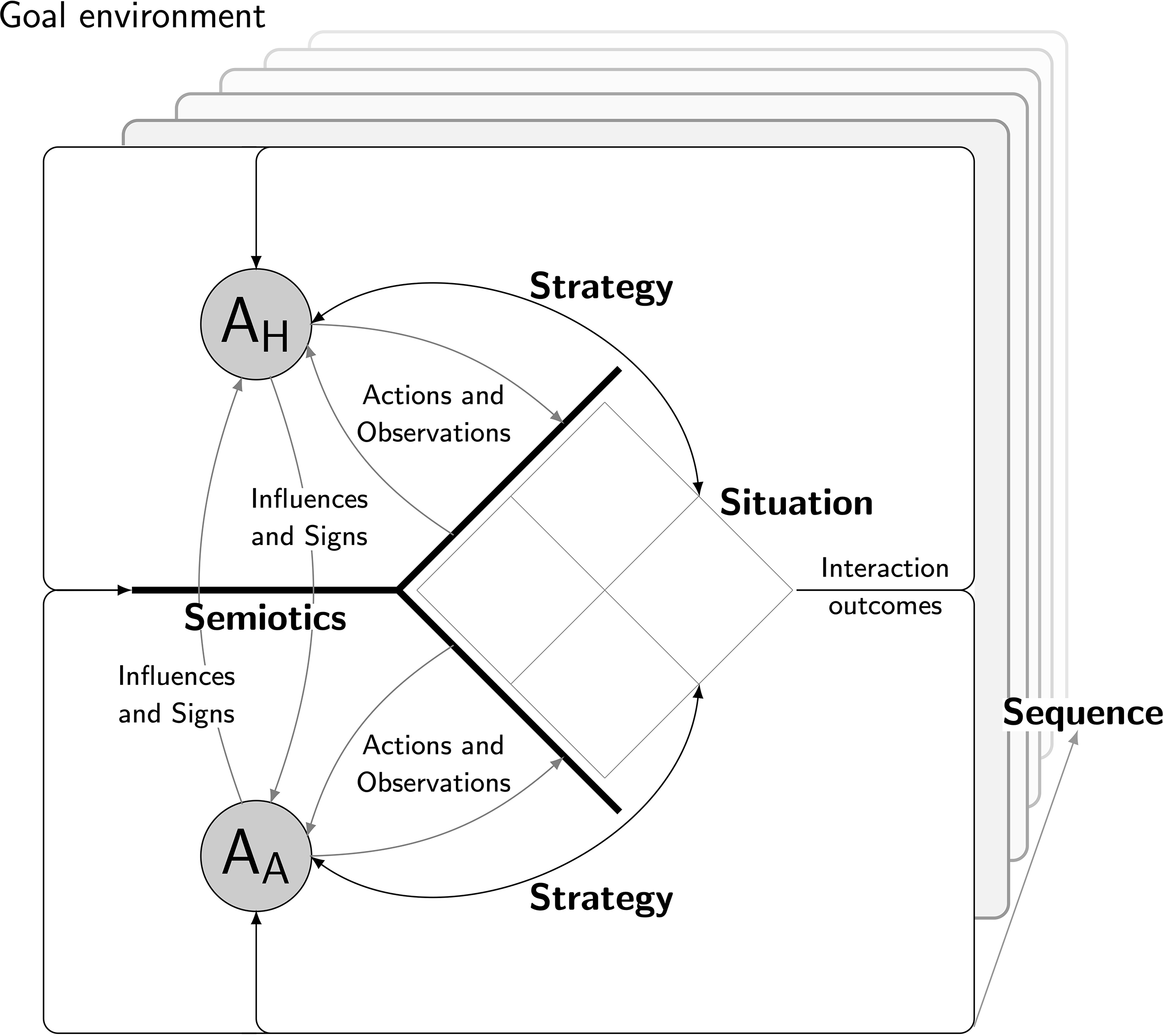
A conceptual model of trusting increasingly capable automation and its effect on interaction outcomes requires consideration of the situation, semiotics, sequence, and strategy. Fading in this figure is used to depict future situations.
The situation is structured by two essential components, the choices of each agent, and the payoffs of those choices (e.g., Figure 2). Each of these components depends on the sociotechnical system and related factors of the goal environment, such as organizational structures (e.g., chain of command, management practices, incentives), time constraints of the task, assigned or resulting workload, individual preferences, and perceived risk. The type and length of sequence directly influence the structure of subsequent situations, which influences the strategy that an agent may use. Strategy can draw from outside knowledge, but is embedded within the goal environment, and can be constrained by the situation and the sequence. Semiotics may start with an interface and its associated artifacts (e.g., observable signals, display design features), but it also includes the agents’ actions and the interpretation of those actions. Together, these factors affect the process of trusting, which in turn affect future agent actions, as the agents draw or apply information from the goal environment, their prior knowledge, interaction history, social norms, predispositions, and confidence (Lee & See, 2004).
Implications for Design
This framework specifies why, when, how, and which factors might enhance trusting increasingly capable automation and identifies potential understudied factors of trust in the human–automation interaction literature. We postulate that certain factors may have been understudied because of the wide application of more narrowly scoped frameworks that are based on supervisory control automation, and the information processing view of trust.
For example, design guidelines that promote transparency or “make clear what the system can do” (Amershi et al., 2019, p. 3) offer necessary but insufficient guidance for system designers. Conducting a task analysis to reveal what the system can do is an important step for human-centered design, but task analyses do not address how trust develops during repeated interactions and across situations. Focusing on automation responsivity in joint decision making can help capture key elements of trusting in interactive, goal-oriented environments. A focus on automation responsivity makes clearer the need to distinguish between features used by the automation and the input variables needed for human interpretation (Ribeiro et al., 2016), or to use simpler automation that does not require explanations and can be adjusted by the user (Rudin, 2019). Designing for automation responsivity goes beyond supporting human observations and interventions, to make it possible for a person to influence automation and for the automation to influence the person.
The framework also highlights trust theories that have been neglected in prior empirical work. Together, these theoretical perspectives can inform design at the level of the algorithm, interaction, interface, and even the organization, by way of human–automation joint action. These perspectives may be critical for evaluating the long-term efficacy of current automation and for designing new automation. To support this effort, the four-concept framework for trusting automation can be used to:
Identify the situations and decision points where trusting and trust calibration are critical (Situation)
Clarify the type of information conveyed during interactions, such as signals with communicative or symbolic value, not just instrumental value, to support system-level cooperation through trusting (Semiotics)
Identify factors of automation responsivity that may have lasting effects on trust, or that may affect trusting but only after multiple interactions (Sequence)
Design context-aware actions for navigating into trust situations that promote cooperative joint action and mutual trusting (Strategy)
Extending This Framework
The foundation of this framework rests on the formal representations of interdependent trust situations. However, real-world situations are not usually so simple. The payoffs in a situation may be difficult to quantify, and for most decision models in the wild, defining a common unit of measure for different outcomes can be challenging. For example, how does one place the perceived risk of injury or death of a pedestrian on the same scale as a 30-s delay for the passengers in a vehicle (Domeyer et al., 2019)? Additionally, it is less clear how specifying the cell values within a structure, typically determined through surveying a sample population (Kelley et al., 2003), would translate to in-the-moment, real-world decisions. It is clear that additional research is needed to distinguish between people’s reflective responses—decisions made when given time to assess—and their in-the-moment decisions with increasingly agentic technology (Schilbach et al., 2013; Takayama, 2009).
The situations themselves also do not fully capture the metasituation, depicted as the “goal environment” in Figures 1 and 4, or how agents may come to control the construction of these situations, such as speeding up to negotiate a “game of chicken,” or slowing down to indicate an intention to allow a pedestrian to cross. Such decisions that occur in-the-moment can change the situation for some people, but not for others who do not notice it. To better represent reality each situation would not be isolated, but embedded in a sequence of situations. Making these patterns clear so far seems to be a retrospective exercise, or prospective only for the next near situation, given the same challenges of forecasting in complex environments.
Although simplistic representations only account for a portion of the factors, at the same time, they can help sort through the complexity of reality—where there are multiple parties with varying interests, varying levels of control, and limited resources. Situation structures thus help with identifying critical decision points, and the likely decisions that will be made, based on the rewards of an agent, or on the probability that one action will be preferred over another. Altogether, this framework for trusting in dynamic, human–automation joint action highlights a new perspective to guide future job design, information design, and interaction design.
Conclusion
Extant research on human trust in automation focuses on calibrating human trust through observations of the automation and assumes that trust calibration will lead to more appropriate use of the automation. Yet, a singular focus on the competence of observed automation may be less useful for system design as automation becomes more autonomous, and adopts roles that are more similar to team members, in environments where coordinative and cooperative properties determine performance. Assessing these properties requires a relational approach, and a focus on trusting, rather than trust.
This relational approach clarifies why future work on trust must consider not just the social influence of automation, but also the social implications of people adjusting, adapting, or altering automation. Beyond reliability and reliance actions, measures of responsivity and the ability to resolve conflicting goals may be more relevant for future automation. The four concepts presented—situation, semiotics, sequence, and strategy—represent an initial framework of relational trust to better understand the mechanisms and broader effects of trusting increasingly capable automation. This relational framework stresses that the goal is not to maximize trust, or to even calibrate trust, but to support a process of trusting, for more resilient human–automation partnerships.
Key Points
Two trends—the development of more capable automation, and the flattening of hierarchical roles—suggest that social factors may become greater determinants of human–automation system performance than previously considered.
Beyond automation reliability, interacting agents in complex environments must also demonstrate responsivity to advance trusting relationships and system resilience; this demands an ability to resolve competing goals through social processes.
An integration of social psychological theory and human–technology interaction literature summarizes a relational framing of trust with four concepts: situation, semiotics, sequence, and strategy.
These four concepts reveal open questions in the literature on trusting automation and may be used to guide future research and design of increasingly autonomous automation.
Footnotes
Acknowledgments
The authors thank the anonymous reviewers, Joshua E. Domeyer and Mengyao Li whose comments improved the manuscript. This work was partially supported by the NSF Graduate Research Fellowship Program [DGE-1256259], Air Force Office of Scientific Research [FA9550-18-1-0067], NASA [80NSSC19K0654], NSF [FW HFT-1840085] and the U.S. Department of Homeland Security [17STQAC00001-03-00]. Any findings or recommendations expressed in this material are those of the authors and do not necessarily reflect the views or policies of the research sponsors.
Author Biographies
Erin K. Chiou is Assistant Professor of Human Systems Engineering at The Polytechnic School at Arizona State University. She received her PhD in industrial and systems engineering from the University of Wisconsin-Madison in 2016.
John D. Lee is an Emerson Electric Professor within the Department of Industrial and Systems Engineering at the University of Wisconsin-Madison. He received his PhD in mechanical engineering from the University of Illinois, Urbana-Champaign in 1992.