
Abstract
Objective
This study investigated the influence of game features and practice type on human kinematic and muscular performance in a virtual reality exercise (VRE). Participants demonstrated changes in shoulder flexion angle and muscle activation under different virtual scenarios.
Background
Conventional VRE studies often compared the outcomes between an experimental group that underwent exercise in VR and a real-world exercise control group, whereas comparisons between VRE programs are lacking. Besides, the attributes of VREs received little attention.
Method
Thirteen able-bodied participants performed upper extremity exercise movements in immersive VR using a head-mounted display. Participants performed task-oriented and imitation-oriented movements with different game features. Shoulder muscle activity (the deltoid, supraspinatus, and infraspinatus) and shoulder motion were collected.
Results
Practice type (task-oriented, imitation-oriented) significantly influenced the flexion angle of the shoulder complex (F(1,11) = 9.53, p = .01), and the muscle activity of the supraspinatus (F(1,9) = 12.61, p = .006) and the infraspinatus (F(1,9) = 12.71, p = .006). Game features did not have a statistically significant effect on shoulder flexion angle or shoulder muscles’ activations.
Conclusions
Compared to imitation-oriented practice, task-oriented practice elicited more intensive shoulder movements and muscular efforts but also induced greater movement variations. Substantial differences across game features levels should be further investigated to have significant effects.
Applications
This research may help guide the design of future VREs. For strength training or rehabilitation where intensive practice is required, task-oriented practice should be considered; for movement learning where movement consistency is required, imitation oriented practice should be adopted.
Introduction
Virtual reality (VR) is a computer-generated 3D environment that enables highly controllable and interactive experiences, which has considerable impact on entertainment, education, and communications (Barnes, 2016). It delivers 3D spatial-temporal visual information used for virtual reality exercise (VRE) programs in supporting spatial movement learning, such as learning dance moves by imitating a virtual teacher (Chan et al., 2011) and playing immersive VR “exergames” (exercise games) for full-body exercise (Finkelstein et al., 2011). In the clinical domain, VRE programs have been used for balance training (Duque et al., 2013; Kim et al., 2009), muscle strength improvement (Chen et al., 2012; Kim et al., 2013), and fall prevention (Lim et al., 2017). Many VRE programs have shown promising outcomes (Farrow et al., 2019; Mazzone et al., 2013) that led to the increased interest in VR-based exercise and movement learning.
The success of VREs has been reported in studies that primarily compared the outcomes of those who have received VRE intervention to those who received usual care. The positive outcomes of VREs were associated with the hardware and software of virtual environments, including customizable design, multimodal information, and various augmented feedback (Burdea, 2003). Yet, the underlying mechanism and attributes that facilitate VRE outcomes are often overlooked and not specifically examined (Howard, 2017). In other words, aside from the inherent differences between a VRE (e.g., 3D, “cool factor”) and conventional exercise, it is indispensable to examine contributors to successful VRE design and exercise goal in immersive VR, and thereby support the design of future VRE with appropriate VR features.
To study the constituents of successful VREs, the first step is to understand the positive factors in physical exercises and trainings. Engagement is a key contributing factor in physical exercise and rehabilitation (Schmidt et al., 2019), which is the affective quality or experience of a person when drawn into an activity (Lohse et al., 2016). Interactivity, background sound, and reward are environmental properties of games that contribute to the experience of engagement (Lohse et al., 2016). On the other hand, the motivation is a psychological property that promotes actions toward a goal (Lohse et al., 2016) and attributes such as challenges, sensation, and curiosity can contribute to an individual’s motivation (Pirovano et al., 2016). Whereas engagement and motivation are different, they are in fact related constructs (Lohse et al., 2016).
In a typical physical rehabilitation program, individuals often perceive their experiences as boring and time consuming, which may lead to decreased effort and engagement (Burdea, 2003; Schuler et al., 2011) and thus compromise rehabilitation outcomes. Promoting motivation is key to ensure continued physical activity and increased muscular activity (Rahman & Rahman, 2010; Schuler et al., 2011). Compared with traditional physical exercise program, VRE provides an enriched and interactive environment that promotes user engagement (Sveistrup, 2004). Even performing similar movements, users naturally consider interactions in VR to be novel and enjoyable (Lewis & Rosie, 2012). The addition of competition and game feature design (e.g., scoring system, interaction, and feedback) helps engage users to exert physical effort during practice (Deutsch et al., 2008). Lohse et al. (2016) studied participants’ motor learning outcomes via a goal-oriented computer game, and it was found participants in the engaging condition (game group, abundant game features) demonstrated improved skill retention and transfer when compared to the less engaging condition (sterile group, identical task but fewer game features). Despite the benefits of game feature design in VRE, few studies explicitly examined increased engagement in VR and overall outcomes (Howard, 2017). Thus, there is a need to study the effect of levels of game features in VR on human physical performance and engagement facilitation.
Practice is also an important factor in successful exercise programs. The amount, intensity, and type of practice are fundamental for therapeutic success (Dobkin, 2004; Kleim & Jones, 2008; Schmidt et al., 2019). There are two modes of practice: imitation-oriented and task-oriented. Imitation-oriented practice (observational learning) is delivered when an instructor demonstrates movements and the learners learn by observing and mimicking (Ferrari, 1996). Prerecorded videos of an instructor performing the movements can also function as substitutes (Anderson et al., 2013). For instance, a virtual “teacher hand” animation was displayed and users needed to synchronize with the virtual teacher hand as accurately as possible (Holden & Todorov, 2002). On the other hand, task-oriented practice (task-specific training, goal-directed training) enables participants to practice movements with a goal. Some argued that the outcome of training is optimized when the practice is meaningful and similar to the expected motor skill in physical world (Barnett et al., 1973; Kleim & Jones, 2008). Performing specific task-oriented practices recreate conditions of the physical world and thus increasing physical fidelity of the exercise (Howard, 2017). In conventional gait training, individuals are often guided to perform abstract knee or ankle movements instead of walking (Howard, 2017), which may impede the transfer of skills gained from training. Both engagement and practice mode are important factors for learning in the physical environment; examining these two factors will help glean further insights in VRE and contribute to the understanding of the design of successful VRE.
In this exploratory work, we examined the effects of game features and practice type of VRE on human performance, specifically the muscle activity and kinesthetics of the shoulder complex in able-bodied individuals. Three levels of game feature (low, medium, high) and two types of practice (task-oriented, imitated-oriented) in a full factorial experimental design was implemented. The experimental task is a pick-and-place, which was adapted from a movement commonly used in activities of daily living (ADLs). Embedding ADL-derived movements in exercises may help adapt and transition to everyday living (Liu et al., 2014). The scenario of the virtual environment also depicted a home (nonclinical) setting, and this design is informed by performing home-based rehabilitation exercise that involves ADLs (Adams et al., 2018; Latham et al., 2014; Liu et al., 2016). The objective of rehabilitation exercises is to improve muscular strength and functional range of motion (ROM), and therefore the operational definition of enhanced performance in this study increased electromyography (EMG) and flexion angle. Thus, enhanced performance was operationalized as greater flexion angle and EMG since rehabilitation exercises aim to increase joint ROM and muscular activity (Moradi et al., 2020). It was hypothesized that greater shoulder flexion angle and greater muscular efforts are expected in the task-oriented practice compared to the imitation-oriented practice because task-oriented practice has physical meaning and is associated with a real-world task to which people relate. It was also hypothesized that the higher level of game features in VR would produce greater shoulder flexion angle and more intensive muscle activity because higher game features could promote greater engagement, which may encourage more intensively movements greater muscular efforts (Schuler et al., 2011). In the long term, the outcomes will be extended to enhance the performance of individuals with different goals, including home-based workout and virtual rehabilitation, and illuminate the design of future VRE.
Materials and Methods
Participants
Thirteen participants free of upper extremity disorders (nine males, four females) were recruited from North Carolina State University (NCSU) with informed consent. This research complied with the tenets of the Declaration of Helsinki and was approved by the Institutional Review Board at NCSU. The mean age was 25.3 years (SD = 3.0, range = 11), and all participants were right-handed. Among the participants, three had no experience of using VR through a head-mounted display (HMD) and ten had used HMD before but rarely (0–1 per month). The recruitment criteria were adapted from previous work (Chen et al., 2015, 2017): participants who self-reported upper-limb injuries in the last 3 months were excluded. Safety-related VR exclusion criteria were individuals who had a history of seizure, motion sickness, and sensitivity to flashing lights. The experiments were conducted in the Biomechanics Laboratory at NCSU and lasted approximated 1 hr per participant, and each participant was compensated ($10/hr).
Equipment
The VRE system consisted of virtual scenarios and hardware. Virtual scenarios were rendered by a game engine (Unity, https://unity3d.com/) and presented to participants via an HMD (Vive, HTC and Valve Corporation). A controller was used to interact with virtual objects in the scenarios. The participants were embodied inside an avatar, in which they were able to see their virtual arms and legs through the HMD. The upper body movements of the avatar were driven by the participants’ real-time movements tracked by the HMD and controller positions.
For data collection, participants’ whole body movements were monitored by a set of 14 optical motion tracking cameras (Raptor 4S, Motion Analysis). Twenty motion tracking markers were placed on the participant’s major upper body landmarks to collect joint coordinate data (Figure 1). EMG electrodes (Trigno, Delsys) were placed on the muscle belly of the deltoid, supraspinatus, and infraspinatus on the dominant side to monitor shoulder muscle activity (Figure 1). The muscles were selected based on the pick-and-place task movements, where the supraspinatus and the deltoid raised the arm and the infraspinatus assists in moving the arm backward (Gray, 2000).
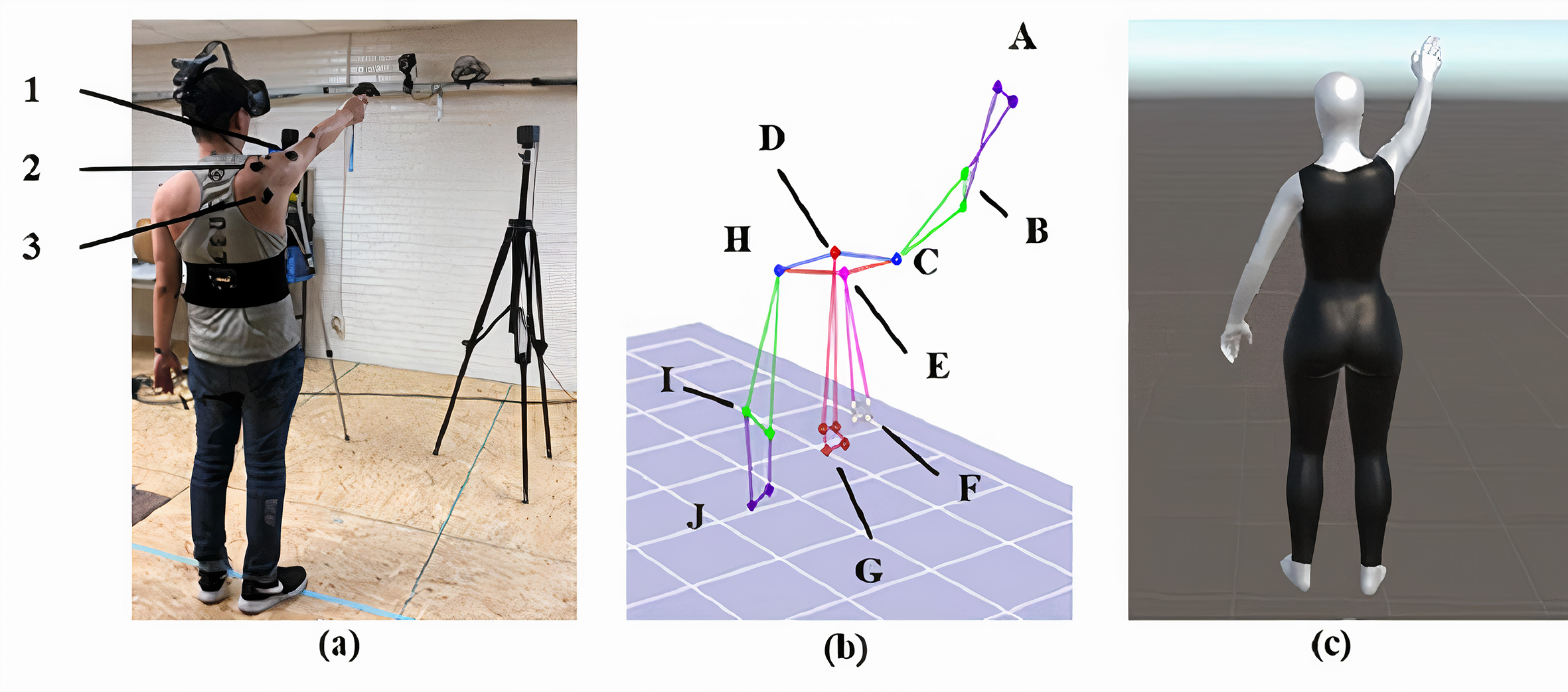
(a) Experimental setup and participant. A participant with EMG sensors and motion-tracking sensors attached on upper body in a fixed standing position holding the controller while looking into a head-mounted display. The EMG sensors are attached to the deltoid (1), the supraspinatus (2), and infraspinatus (3). (b) A snapshot of the real-time joint data captured by the motion capture system at the same posture of (a). The labeled marker regions are as follows: right wrist (A), right elbow (B), right acromion (C), incisura jugularis (D), C7 (E), T8 marker cluster (F), xiphoid process marker cluster (G), left acromion (H), left elbow (I), and left wrist (J). (c) The joint data mapped to humanoid model for generating instructor animations. Note. EMG = electromyography.
To control for the movements performed in the imitation-oriented practice, an animated virtual instructor was created to deliver a set of standardized movements. The animation of the virtual instructor was prerecorded and generated by mapping upper body joint data of the researcher (179 cm, 78 kg, 26-year-old male) to the model of virtual instructor (Jáuregui et al., 2014). To create the animation, the researcher picked up a book from the table and placed it on a bookshelf, and the 3D coordinate was recorded by motion capture system to reconstruct the positions of instructor joints (Figure 1). It was designed to be consistent in all scenarios to guide the participants to perform the movement.
Experimental Design and Protocol
A 2 × 3 (practice types × game feature levels) full factorial design experiment was conducted, which yielded six scenarios (2 × 3). Within-subjects variables were game feature level (low, medium, high) and practice type (task-oriented, imitation-oriented). The order of the experiment condition was randomized during the experiment: each of the six experimental conditions was numbered and a random sequence of experiment condition was generated for each participant. The experiment ended when participants completed all repetitions in all six scenarios.
Participants were donned with EMG sensors and completed the shoulder muscle maximum voluntary contraction (MVC) test (Boettcher et al., 2008), which was performed by participants maximally exerting against an opposing force. Verbal encouragements were provided to arouse the maximum muscle activation. The EMG measured during the MVC test will be used to normalize participants’ shoulder EMG data.
After the MVC test, the motion capture markers were placed on the bony landmarks of participants by following the International Society of Biomechanics recommendations (Wu et al., 2005). Participants wore the HMD and assumed a standing ready position, and they performed a set of practice tasks to become familiar with VR and the use of controller. The practice task was to pick up three virtual boxes using the controller and place them at a specified location in VR, and more practice was provided if needed. The experimental task was to perform a series of shoulder joint flexion movements where the participants would produce a reaching posture involving their dominant hand in two types of guidance conditions: (1) the imitation-oriented practice and (2) the task-oriented practice conditions.
In the imitation-oriented practice condition, the animated virtual instructor demonstrated eight repeated shoulder flexion movements (Figure 2), and the participants were instructed to mimic and follow the instructor’s and performed the same pick-and-place movements. The number of repetitions is adopted from a meta-analysis on motor skills training (Behringer et al., 2011), which suggested 8–12 repetitions. 0° orientation (instructor and participants’ avatar faced the same direction) was applied to reduce more spatial transformation (LaFortune et al., 2018).

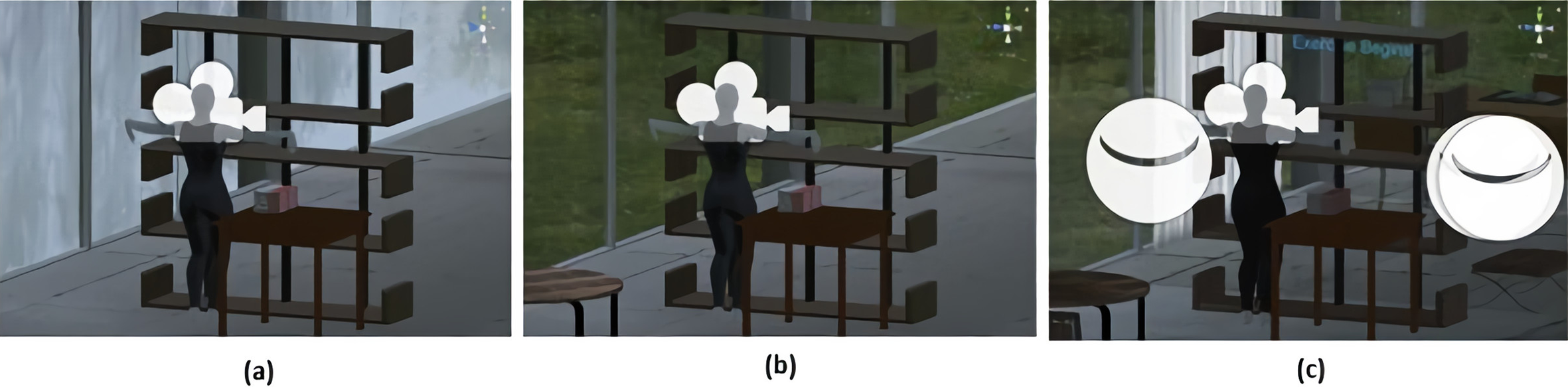
Exercise scenarios from the virtual environment, where the white camera icon depicts the location of the participant and thus “camera view.” (a) The imitation-oriented practice condition had a virtual instructor standing in front of the participant’s avatar, where the participant controlled the avatar’s movement to mimic the movement of the virtual instructor. (b) The task-oriented practice condition was to perform a pick-and-place task, where the participant controlled an avatar to pick up books and placed them on the shelf.
In the task-oriented practice condition (Figure 2), participants were asked to pick up a virtual book from a virtual table using the controller, one at a time, and then place it on the highest level of a virtual bookshelf. The pick-and-place task prompted shoulder flexion and thus produced an overhead reaching movement that was similar to the movement performed by the virtual instructor. There were eight virtual books and each trial ended when all eight books were picked up and placed.
Both practice conditions had three different levels of game feature (Figure 3), which aimed to make the task more interesting by showing varying levels of background richness and reward (Lohse et al., 2016) to elicit greater participant interest and engagement. Game features were based on various visuals and lighting rendering, and a scoring panel that counted the number of books that have been placed on the bookshelf. The VR scene of the lowest game feature had limited environment settings (no grass background), no light rendering, and no furniture. The VR scene of the middle game feature had environment settings, no light rendering, and several furniture. The highest game feature scene presented vivid lighting rendering, abundant furniture, and a scoring panel that counted the number of books that have been picked up.
Three levels of game feature for task-oriented practice condition: (a) low level, (b) middle level, (c) high level. The white camera icon depicts the location of the participant and thus “camera view.” The white circles depict the sophisticated lighting elements in the high game feature level.
Variables and Analysis
To study the effect of practice types and game feature levels on participant performance, this study examined objective measures: EMG and shoulder joint flexion angle. EMG signals convey valuable information about muscle activity and EMG amplitude can function as an index of muscle strength and muscular effort (Raez et al., 2006). All EMG signals were filtered with a fourth order band-pass (20 Hz–350 Hz) Butterworth filter, rectified and smoothed by a time window of 200 ms (Schuler et al., 2011). The maximum amplitude in each condition was normalized with respect to the MVC tests, which yielded the normalized EMG (nEMG) values reported in the results. Shoulder joint flexion is a common activity performed during over-head reaching movements. The angle at which shoulder joint flexion reached its maximum was analyzed in this study as an indicator of the extent of shoulder joint flexion. The flexion angles were calculated based on the 3D coordinates of the motion capture markers that were attached to the upper-body bony landmarks (Lee et al., 2015).
A two-way repeated measure analysis of variance (ANOVA) was used to analyze the effects of game feature level and practice type on participants’ shoulder muscle activity and shoulder joint flexion angle. Statistical significance was set to be α = .05.
Results
Maximum Shoulder Joint Flexion Angle
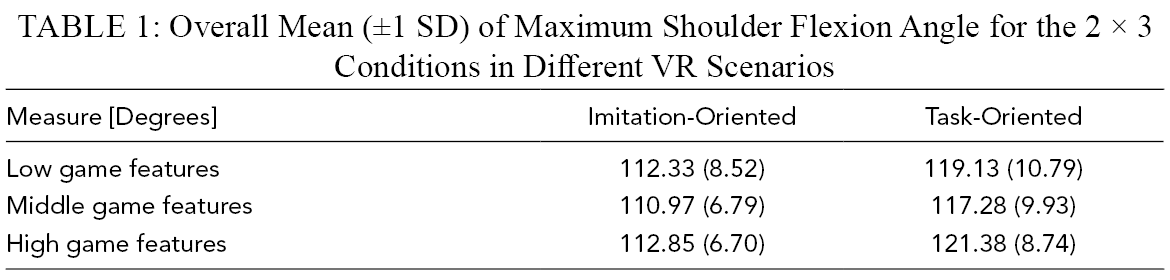
A two-way repeated measure ANOVA indicated a statistically significant main effect of practice type (F(1,11) = 9.53, p = .01) on maximum shoulder flexion angle, but no statistically significant main effect of game feature level (F(2,22) = 1.67, p = .21). No statistically significant interaction was found between practice type and game-like feature level (F(2,66) = 0.22, p = .81). Model residuals’ normality is validated as Shapiro-Wilk test showed W = .975, p = .16. Data variance homogeneity is validated with Levene’s test (F(5,66) = 0.83, p = .53). Effect size (Olejnik & Algina, 2003) for practice type is η2 = .16 and game feature η2 = .02. Table 1 presents the overall mean maximum shoulder flexion angles in different VR scenarios.
Overall Mean (±1 SD) of Maximum Shoulder Flexion Angle for the 2 × 3 Conditions in Different VR Scenarios
Shoulder Muscle Activity
The mean nEMG of the deltoid was 26.5% of its MVC (Figure 4). A two-way repeated measure ANOVA did not indicate a statistically significant main effect of practice type (F(1,9) = 2.90, p = .12) nor game feature level (F(2,18) = 0.91, p = .42) on deltoid nEMG. There was no statistically significant interaction between game feature level and practice type (F(2,22) = 0.47, p = .64) for deltoid nEMG. Model residuals’ normality via Shapiro-Wilk test showed W = .988
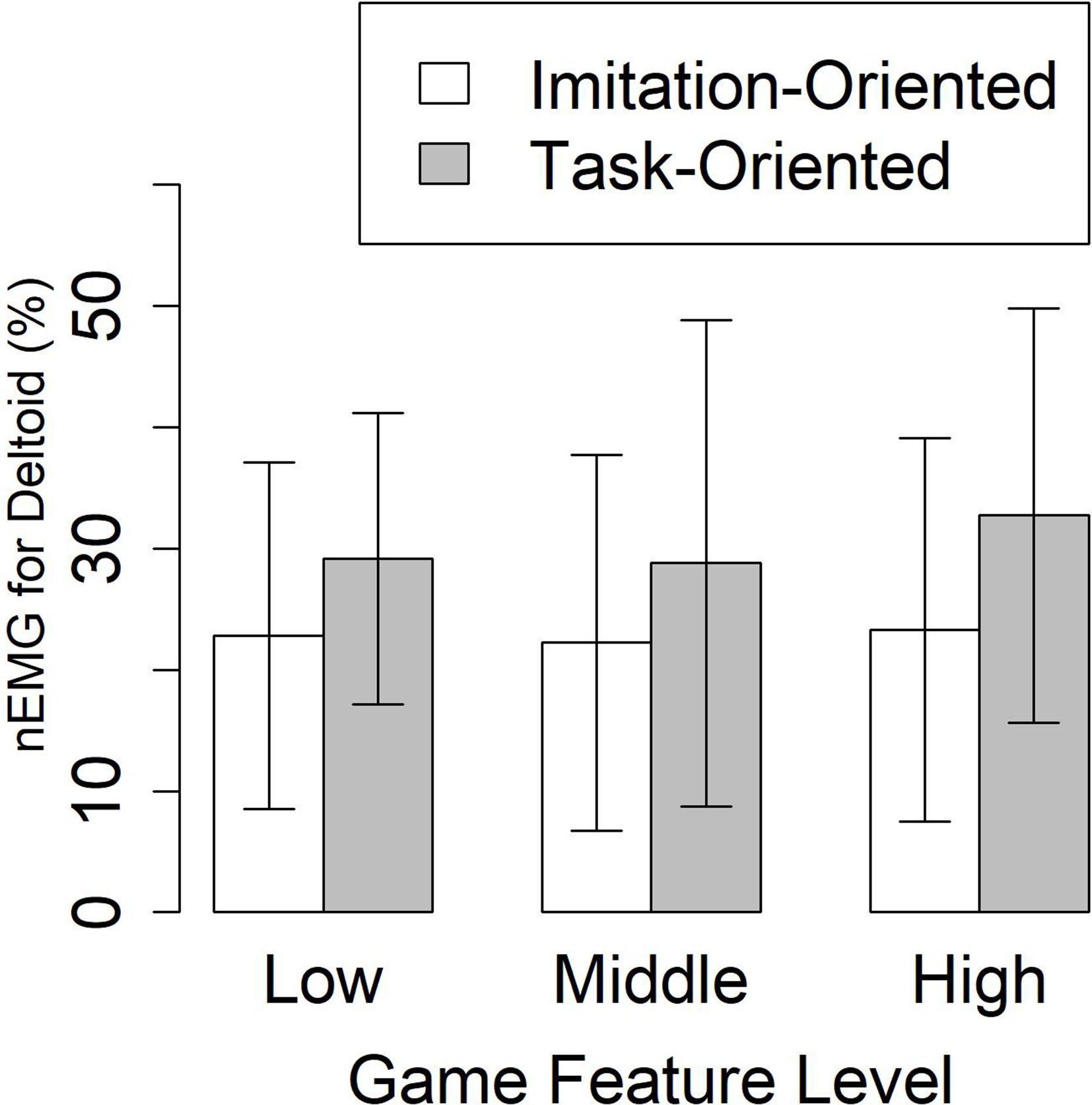
Activity of the deltoid across different game feature levels (±1SE). The muscle activities were not statistically different across different scenarios.
The mean nEMG of supraspinatus was 28.8% of its MVC (Figure 5). There was a statistically significant main effect of practice type on supraspinatus nEMG (F(1,9) = 12.61, p = .006), with the mean nEMG of the task-oriented scenario being 11.2% greater than the nEMG in the imitation-oriented scenario. There was not statistically significant main effect of game feature level (F(2,18) = 0.42, p = .66) nor a statistically significant interaction between game feature level and practice type (F(2,18) = 0.45, p = .65). Model residuals’ normality via Shapiro-Wilk test showed W = .983, p = .56. Data variance homogeneity is validated with Levene’s test (F(5,54) = 0.22, p = .95). Effect size for practice type is η2 = .2 and game feature η2 = .004.
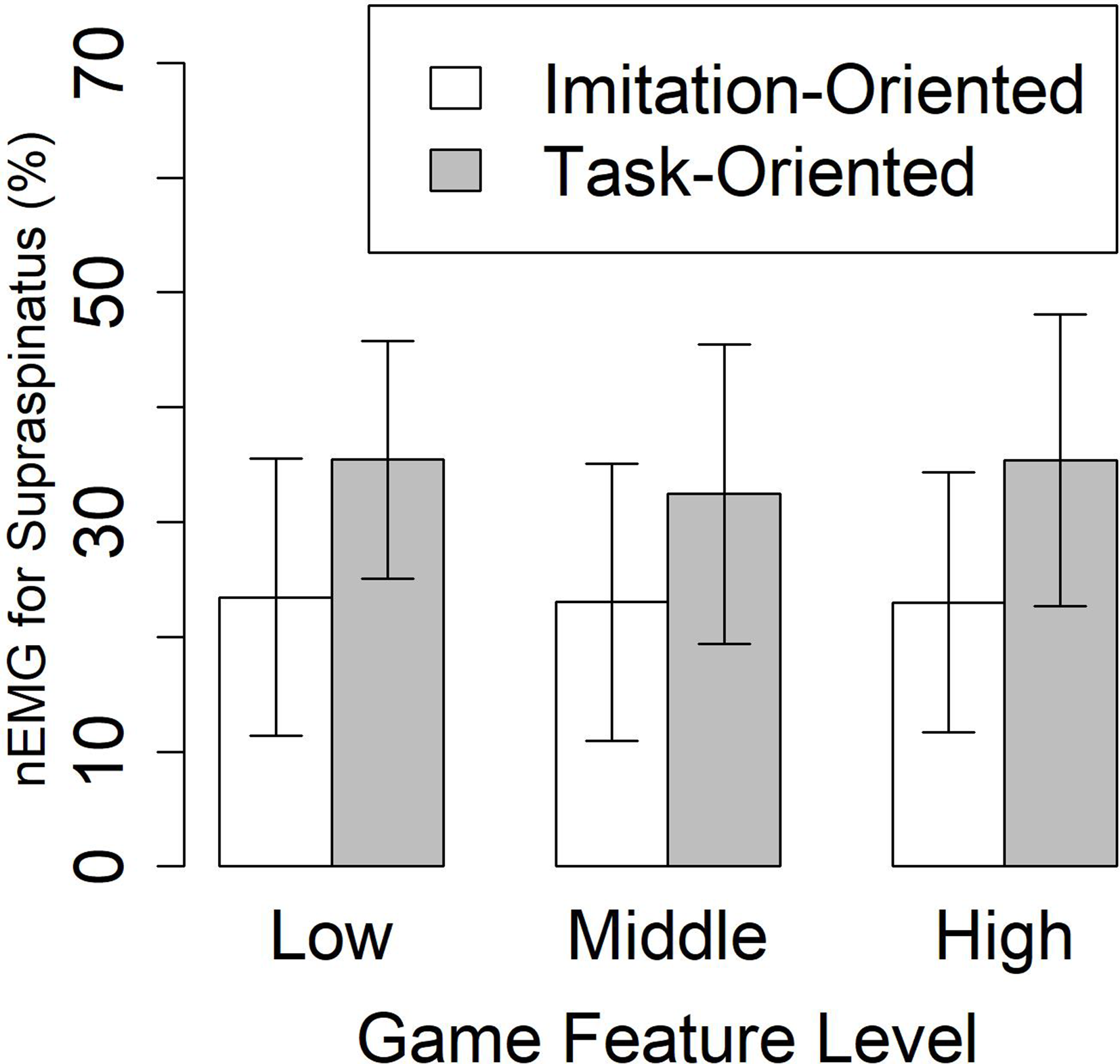
Activity of the supraspinatus across different VR scenarios (±1SE). The muscle activities are statistically different between task-oriented and imitation-oriented scenarios. Note. nEMG = normalized EMG; VR = virtual reality.
The nEMG of infraspinatus was 24.6% of its MVC (Figure 6). There was a statistically significant main effect of practice type (F(1,9) = 12.71, p = .006) on nEMG of infraspinatus, with the mean nEMG of the task-oriented scenario being 7.3% higher than the nEMG in the imitation-oriented scenario. There was not statistically significant main effect of game feature level (F(2,18) = 0.68, p = .52) nor a statistically significant interaction between game feature level and practice type (F(2,18) = 0.67, p = .52). Model residuals’ normality via Shapiro-Wilk test showed W = .993, p = .99. Data variance homogeneity is validated with Levene’s test (F(5, 54) = .32, p = .90). Effect size for practice type is η2 = .06 and game feature η2 = .002.
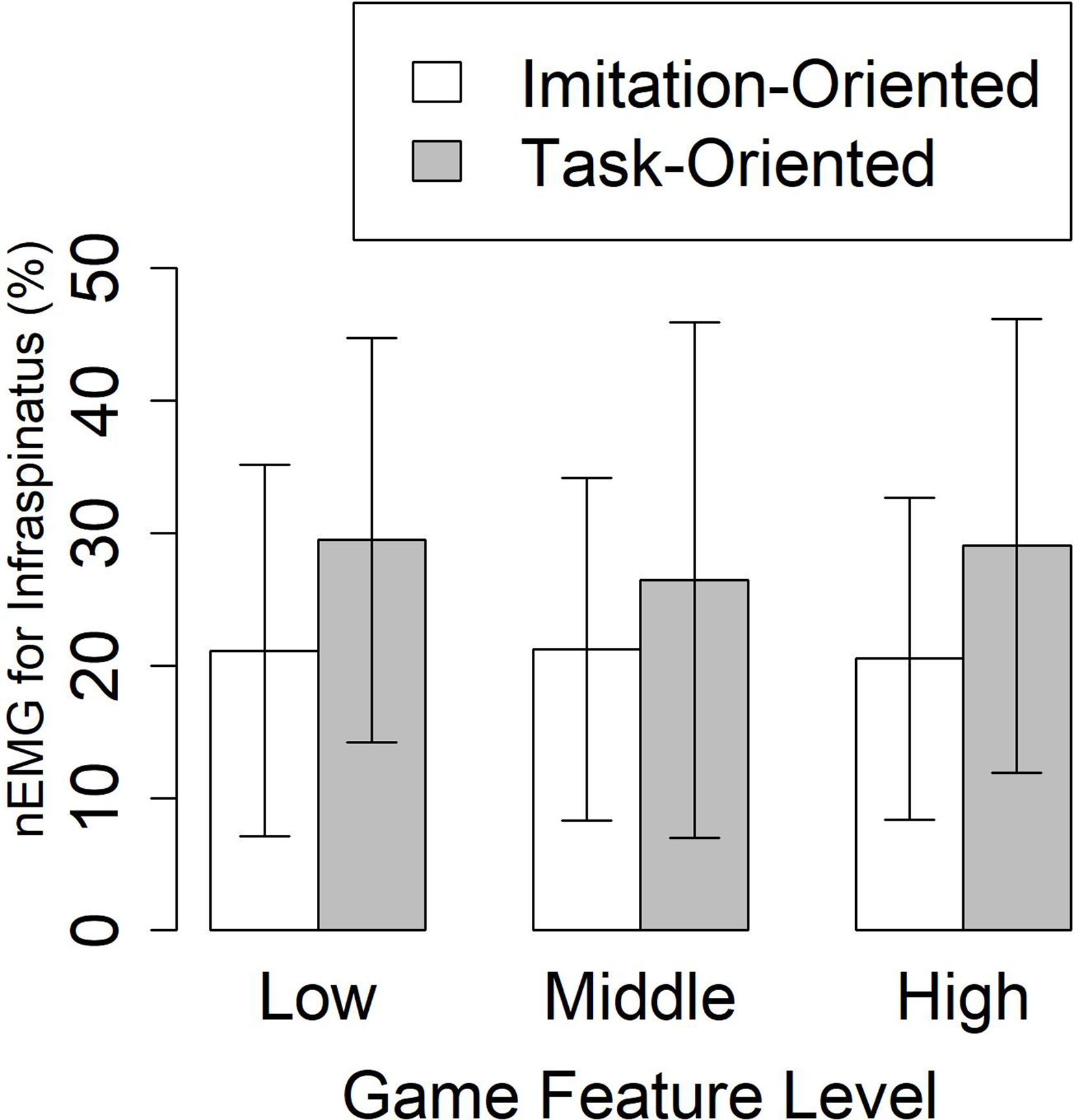
Activity of the infraspinatus across different VR scenarios (±1SE). The muscle activities are statistically different between task-oriented and imitation-oriented scenarios. Note. nEMG = normalized EMG; VR = virtual reality.
Discussion
Understanding the features of VRE that encourage increased user performance is crucial to help advance the designs of VR-based training and exercise. Although the long-term goal is to devise VR-based rehabilitation and therapeutic exercises, the purpose of this exploratory study was to investigate the effects of practice types and game feature levels on shoulder muscle activity and kinesthetic performance during VRE. Instructional information was delivered in an immersive VR through an HMD. The nEMG of three shoulder muscles (the deltoid, supraspinatus, and infraspinatus) and the maximum shoulder flexion angle were examined.
Effects of Guided Practice Type
The participants performed two types of guided practices in VR: (1) imitation-oriented movements by mimicking the actions of a virtual instructor and (2) task-oriented movements that required them to pick up and place books onto a bookshelf. Since task-oriented movements have physical meaning and end goals (Howard, 2017; Kleim & Jones, 2008), we anticipated participants to demonstrate greater shoulder flexion angle and muscle activity in the task-oriented practice because they aimed to place a book on a bookshelf to accomplish the movement goal. The results revealed confirmed the assumption as it showed a statistically significant main effect (F(1,11) = 9.53, p = .01) of guided practice type on maximum shoulder flexion angle, in which participants exhibited greater shoulder flexion angles during the task-oriented practice. Although the task-oriented practice was designed to be repeated pick-and-place movements, this type of movement can be applied to other tasks such as reaching for a mug in a cupboard or restocking an empty grocery shelf. The physical meaning inherent to the movement could have promoted more engagement and exertions (Howard, 2017; Kleim & Jones, 2008). These results have implications for designing therapeutic exercises: it may be advantageous to package intended, monotonous exercises within task-oriented movements to encourage individuals who may need continued practices.
The contractile activities of the deltoid, supraspinatus, and infraspinatus were studied because these muscles are related to the raising movements of the shoulder (Gray, 2000). The nEMG of the supraspinatus had the greatest mean nEMG value (28.8% of MVC), and it was statistically significant different between the two types of guided exercise (p = .006). Specifically, the mean nEMG of the supraspinatus during the task-oriented practice was 11.2% greater than the nEMG during imitation-oriented practice, which may be explained by the characteristic of the pick-and-place task. The pick-and-place task can be decomposed into shoulder flexion (primary) and slight abduction movements. Both the deltoid and the supraspinatus can contribute to shoulder abduction, but the deltoid primarily supported abduction to the side of the body (Hughes et al., 1997); thus, the supraspinatus was more involved for this experimental task. For the infraspinatus, guided practice type had a significant effect on its nEMG (p = .006), which was plausible. Compared with imitating the virtual instructor, practice-oriented condition required more external rotation action to place the virtual books in order; thus, the infraspinatus was more involved.
The primary goal of each exercise can have different measures, including amplitude, accuracy, and speed of the motions (Pirovano et al., 2016). The participants exhibited greater shoulder flexion angle and higher nEMG of the supraspinatus in the task-oriented practice, which could be associated with higher exercise intensity/amplitude. Exercises and tasks that helped increase engagement are important for attaining positive outcomes in therapeutic exercises and rehabilitation (Schuler et al., 2011). On the other hand, the maximum shoulder flexion angle in the imitation-oriented practices had lower variance relative to task-oriented practices (Table 1), which indicated that the participants’ movements were more consistent when following an instructor. Thus, imitation-oriented practices can be more useful when consistent, accurate movements are required, such as learning martial arts and dancing in VR (Anderson et al., 2013; Chua et al., 2003).
Effects of Game Feature Levels
Three levels (low, middle, and high) of game feature design were examined, and it was hypothesized that having more game features would encourage higher shoulder flexion angles and nEMG. Specifically, this study embodied the participants inside an avatar, and levels of game feature were differentiated by environment enrichment, lighting, and a scoring system. However, the analysis revealed no significant effect of game feature on shoulder flexion angle nor nEMG. This result may be attributed to the small differences between consecutive levels of game-like feature, which may be insufficient to elicit different magnitudes of participant movement and exertions. Nine participants verbally described in post-experiment debrief that they focused on the tasks and did not notice the variations of game features, and they considered all conditions to be engaging. As observed by the Lohse et al. (2016) study, where they examined motor skill learning outcomes in an engaging game condition and a sterile condition, participants perceived both conditions to be challenging and remained involved in the learning tasks and had positive learning outcomes. Though some VREs lack game features, they could still promote engagement as most of the participants were relatively novel to interactions in VR. To differentiate game feature levels in VR scenarios design, future studies on motivation effects should implement more game elements and interactions and amplify the gap between each level. Currently, researchers developed their VREs based on existing commercial platform (e.g., Wii) or developed their own exergames to implement exclusive game features, but few studies explicitly explained their design guidelines and principles to increase motivational affordances (Matallaoui et al., 2017).
In addition to game features, studies have shown that practice quantity could influence human’s motor learning outcomes (Lohse et al., 2016). In the present work, we intended to control the amount of practice and focus on the effects of game features and practice type on participants’ performance; thus, there were eight repetitions per experimental conditions by adopting the number of repetitions in the literature (Behringer et al., 2011). If we had increased (or decreased) the number of repetitions, it would be reasonable to anticipate changes in participant performance in terms of shoulder flexion angle and muscle activity. Moreover, if the number of repetitions were to increase, we may expect signs of muscle fatigue embedded in EMG signals, which was not revealed in the current data.
The Use of a Standardized Virtual Instructor
For this study, we aimed to present a set of standardized movements to each participant. Thus, to control for potential effects of varying a virtual instructor, one animated virtual instructor was created using a fixed set of movements captured using a laboratory-grade motion capture system. However, it may be advantageous to create a personalized virtual instructor for each participant to match their anthropometry and stature, and this may be achieved in a shorter period of time using a marker-less camera such as the Kinect (Shingade & Ghotkar, 2014). Yet, motions created by participants may vary and it would be challenging to deliver standardized movements. Given this study employed a standardized virtual instructor, which did not share the same anthropometry as the individual participants, additional analysis was performed to examine potential effects of participant anthropometry (height) on their performance, and the results did not reveal a statistically significant effect of height on performance when the participants imitated the movements of the virtual instructor (p = .55). This suggested that participants of similar height to the animated instructor (within ±1 standard deviation in height) did not exhibit enhanced performance compared with those who were taller or shorter. The adoption of a standardized or a personalized virtual instructor should be driven by the goal of the VRE. If the goal of a VRE was to encourage users to perform a set of standard movements, such as training workers to perform standard lifting movements, we would suggest a standardized instructor generated from an expert.
Limitations and Future Work
There were some limitations in this study. This was an exploratory study that involved 13 participants, which was a smaller group of sample size. However, the supplementary analysis indicated that the assumptions of ANOVA were valid. Whereas this study had an end-of-experiment debriefing with each participant, during which the participants verbally described their perception of the study, game features, and engagement, this study did not administer an empirically validated engagement survey or quantitative engagement measure. Therefore, direct comparison across perceived engagement was unavailable. If this had been available, it can be used to quantify the differences between perceived the game feature levels, which may help explain the insignificant effect of game features on exercise performance found in the current study. As for designing different levels of game feature scenario, the disparity across different levels was not phenomenal as expected, as three participants verbally recalled that they did not notice the change of environments. For future direction, we aimed to improve our VRE system by implementing adjustable environment design (customized virtual object size, lighting, and challenges), and we seek to cooperate with professional game developer on game feature design for the VRE. Finally, we hope to extend the research to different groups of people including patients, children, and older adults.
Conclusion
Compared with imitation-oriented practice, task-oriented practice elicited more intensive shoulder movements and muscular efforts during VRE but also induced greater movement variations. We expect the imitation-oriented practice could be applied in movement learning, where users could perform consistent movements. It is also possible to use a combined design for customized goals and investigate the final effect of the combined design (Bovonsunthonchai et al., 2020). While game feature levels did not affect participant performance, it was reported by the participants that they were mostly attending to the task rather than the surrounding, which suggests that substantial differences across game features levels that stand out from different levels should be further investigated.
Key Points
Task-oriented VR exercise led to increase muscle activity and complete movements
Imitation-oriented VR exercise yielded lower practice variability
Imitation-oriented VR exercise may train new movements through precise repetition
Minimal game features did not induce performance changes.
Footnotes
Acknowledgments
This research was partially supported by National Science Foundation (IIS-1822477). The authors would like to thank Ms. Tara Martin for the support in data collection.
Author Biographies
Ken Chen is a PhD student in the Edward P. Fitts Department of Industrial and Systems Engineering at North Carolina State University. Ken received his BS from the School of Reliability and Systems Engineering at Beihang University, Beijing, China in 2017. His research focuses on design and evaluation of virtual reality systems and signal processing in human–computer interface integration.
Karen B. Chen is an assistant professor in the Edward P. Fitts Department of Industrial and Systems Engineering at North Carolina State University. Karen received her PhD from the Department of Biomedical Engineering at University of Wisconsin-Madison in 2015. Her interest is in human performance and behavior in virtual reality, and human–computer interaction.