
Abstract
Objective
Identify a critical research gap for the human factors community that has implications for successful human–automation teaming.
Background
There are a variety of approaches for applying automation in systems. Flexible application of automation such that its level and/or type changes during system operations has been shown to enhance human–automation system performance.
Method
This mini-review describes flexible automation in which the level of automated support varies across tasks during system operation, rather than remaining fixed. Two types distinguish the locus of authority to change automation level: adaptable automation (the human operator assigns how automation is applied) has been found to aid human’s situation awareness and provide more perceived control versus adaptive automation (the system assigns automation level) that may impose less workload and attentional demands by automatically adjusting levels in response to changes in one or more states of the human, task, environment, and so on.
Results
In contrast to vast investments in adaptive automation approaches, limited research has been devoted to adaptable automation. Experiments directly comparing adaptable and adaptive automation are particularly scant. These few studies show that adaptable automation was not only preferred over adaptive automation, but it also resulted in improved task performance and, notably, less perceived workload.
Conclusion
Systematic research examining adaptable automation is overdue, including hybrid approaches with adaptive automation. Specific recommendations for further research are provided.
Application
Adaptable automation together with effective human-factored interface designs to establish working agreements are key to enabling human–automation teaming in future complex systems.
Keywords
Introduction
The increasing examination of automation, autonomous agents, and intelligent systems in a variety of application domains is evident in Human Factors and related publications. For example, advancements in hardware/software to automatically support tasks normally ascribed to humans have and are more frequently being considered in aerospace systems, surface transportation, health care, occupational ergonomics, and robotics (Davenport & Kalakota, 2019; Moray et al., 2000; Sheridan, 2016; Young et al., 2007).
The key goal of this article is to highlight a research gap pertaining to how automation is applied in systems. After a mini-review of flexible design approaches for implementing human–automation systems, the tradeoffs pertaining to the locus of authority that determines how levels of automation are assigned to tasks will be detailed. This will be followed by suggestions for research to maximize the benefits of flexible application of automation for more effective human–automation teaming. For this article, the term “automation” is used for any system that accomplishes (partially or fully) a function/task that was previously or conceivably could be completed by a human operator (Parasuraman et al., 2000), including “autonomy” developments that are designed to be able to achieve task goals independently without external interventions.
Design Approaches for Human–Automation Systems
In some cases, system applications of automation provide vital safety measures, such as taking over control of a high-speed vehicle when it is detected that the human has lost consciousness or when a control input (e.g., to avoid a collision) is needed in less time than is humanly possible. In such instances, a fixed application of automation is appropriate—whenever the critical condition is identified, the safety measure automatically activates. Aside from life-threatening situations, research conducted to date has generally demonstrated that fixed applications of automation to alleviate workload can result in reduced mode and situation awareness, mistrust, complacency, and skill degradation (Endsley & Kaber, 1999; Endsley & Kiris, 1995; Kaber & Endsley, 2004; Parasuraman & Riley, 1997; Parasuraman et al., 1996).
In contrast, design approaches that flexibly apply automation such that its level and/or type changes during system operations can help humans avoid out-of-the-loop problems and have been shown to enhance human–automation system performance (Inagaki, 2003; Kaber & Endsley, 2004; Parasuraman et al., 1996; Scerbo, 2007). In this manner, the system is designed to accommodate a granularity of control (Endsley, 2017), ranging from low-level automation that involves the human more (selecting courses of action and making inputs to determine how the system functions) to high-level automation that engages the human less—the automation determines the best courses of action and how the system functions. At lower level(s) of automation (LOAs), the human has more opportunity to interact with the system, providing a better basis for building trust in its operation and maintaining situation awareness and skills. However, lower LOAs can increase the human’s workload, as well as stress and/or fatigue. At higher LOAs, the human’s workload is less, but this comes with potential costs to situation awareness, engagement, and skill maintenance, as well as other problems if the system’s automated changes are not timely or context relevant.
Applications, however, are not limited to low and high LOAs. Each individual task involved in system operation can be assigned a different LOA. More importantly, a range of LOAs can be implemented in the system including multiple intermediate levels defined in a continuum with fully manual and fully automated LOAs at the two extreme ends. Each intermediate level differs in its specification of the degree to which a task is automated. Perhaps the earliest and most widely cited taxonomy is from Sheridan and Verplank (1978), which defines 10 levels ranging from fully manual to fully automated (Table 1), with each LOA defining the respective roles of the human and automation and how they are to cooperate with each other. This taxonomy has been extended in many ways (see review by Vagia et al., 2016), including multidimensional ones that consider multiple factors (e.g., Parasuraman et al., 2000). See also the “Special Issue on Advancing Models of Human–Automation Interaction” for a discussion of the construct of LOAs (Roth & Pritchett, 2018).
Levels of Automation (Based on a Scale Proposed by Sheridan & Verplank, 1978 )
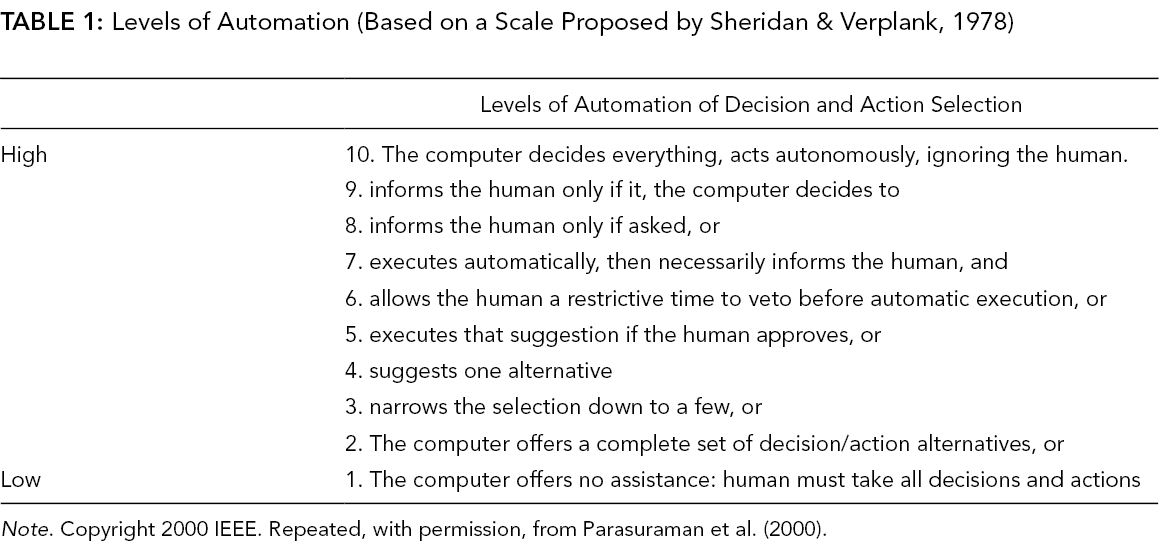
Note. Copyright 2000 IEEE. Repeated, with permission, from Parasuraman et al. (2000).
Application of Flexible Levels of Automation (LOAs)
The application of multiple LOAs is similar to dynamic function allocation in that the division of labor between the human and the automation can be dynamic and context dependent (Hancock & Scallen, 1996; Inagaki, 2003; Kaber et al., 2005; Miller & Parasuraman, 2007; Parasuraman & Rizzo, 2008; Parasuraman et al., 1992; Scerbo, 1996). The designer has flexibility with respect to which of the multiple LOAs is currently in effect for each task and under what circumstance(s) each LOA/task assignment remains constant versus changing. The myriad of available options can actually complicate determining the ideal LOA/task assignment scheme before and during system operation. For example, higher LOAs might be assigned to a task that the human would benefit from additional assistance. In contrast, automating numerous straightforward tasks would free up the human’s resources to attend to more cognitive demanding tasks or those that only the human has the authority to accomplish. Also, the ideal LOA/task assignment might instead depend on the current context. When task load is high, automating select tasks can help reduce human workload and fatigue. As task load lessens, the associated LOAs could be lowered, reengaging the human to improve situation awareness with the human more in the control loop (Moray et al., 2000; Parasuraman et al., 1992; Scerbo, 1996). However, the advantages of having optimal levels of automation’s assistance across multiple tasks involved in system operation can be negated by costs in terms of the human’s mode awareness of LOA changes, associated time to reorient, and ability to detect automation failures (Kaber & Endsley, 2004). Thus, careful design of the flexible automation and related teaming interfaces is critical to ensure they will effectively support human–automation teaming and avoid pitfalls such as automation management costs (Kirlik, 1993).
Much of the research examining flexible automation centers on determining the “triggers” that initiate LOA changes (Feigh et al., 2012; Inagaki, 2003). Triggers based on the human’s physiology (e.g., increased heart rate indicating stress) have fueled the emergence of neuroergonomics that aims to advance neurophysiological sensing, imaging, and processing (Parasuraman & McKinley, 2014). Other types of triggers (Feigh et al., 2012) include critical events (such as system failures and environmental changes), the human’s performance (e.g., reaction time increases or exceeds established criteria), one or more models (e.g., human cognition or system/task performance), or combinations of triggers.
Tradeoffs of Locus of Authority That Changes LOAs
The term adaptive automation is commonly used to refer to technology that enables a system to flexibly recommend and/or initiate LOA changes whenever criteria for one or more triggers have been met (Oppermann, 1994; see characterizing framework in Feigh et al., 2012). Adaptive automation has been demonstrated to improve task performance and reduce attention management demands over fixed automation (e.g., Calhoun et al., 2011; Parasuraman et al., 2009). However, human acceptance of automation may decrease when the automation changes LOAs (Parasuraman & Riley, 1997). Also, the human’s situation awareness can be hampered if the adaptive changes are inappropriate, untimely, or unpredictable—often the case when complex, ill-defined situations complicate the processing involved in adaptive automation. In these cases, LOA shifts can be an annoyance and even impact system performance and safety (Miller & Hannen, 1999). Alerting the human that an LOA change is recommended or will be made by automation (mindful of human–automation exchange etiquette; Hayes & Miller, 2010) may help keep the human operator aware of the automation’s functioning, but would still impose attentional demands.
In contrast to the system recommending and/or initiating LOA changes in adaptive automation, with adaptable automation, the human retains the authority to invoke or change LOAs (Oppermann, 1994). By keeping the human in the loop, this approach “takes advantage of the human’s ability to anticipate and prepare for changes and provides the flexibility that is needed in novel situations” (van Dongen & van Maanen, 2005, pp. 2–3). Moreover, the human is able to benefit from flexible LOA assignment with less identified pitfalls associated with adaptive automation (Miller & Parasuraman, 2003, 2007). For example, adaptable automation has been found to result in higher human operator acceptance, appropriate levels of trust in the automation, and enhanced situation awareness (Parasuraman & Wickens, 2008). Adaptable automation may also facilitate recovery from automation failures, enabling the human to quickly lower LOA for direct control. In this manner, adaptable automation can help serve as a safeguard when automation is operating outside its programmed capabilities. However, having the human in charge of LOA management raises other concerns: the human could become too preoccupied to make desirable LOA changes or inadvertently select an inappropriate LOA (Kaber & Riley, 1999). Moreover, there is additional management workload associated with adaptable automation (Kirlik, 1993).
Sauer and Chavaillaz (2018, p. 117) provide a “coarse assessment” of both fixed and adaptable automation, along with three types of adaptive automation (each varying triggers). They concluded that adaptable automation is more advantageous over alternative approaches in terms of responsiveness to changing situations, automation state awareness, and perceived control over the system. These more recent conclusions match those Miller et al. (2005) made over a decade earlier based on examining tradeoffs in terms of a three-way relationship between the workload the human experiences in interacting with the system when performing tasks, the overall competency of the human–automation team across a range of circumstances, and the degree to which the automation is predictable to the human operator. In their final paragraph (Miller et al., 2005, p. 27), the authors express their skepticism on whether adaptive automation has “utility in high complexity and high criticality domains.”
Despite the documented tradeoffs, the number of publications addressing adaptive automation has consistently been about ten times that of those focused on adaptable automation. This discrepancy in publication records is also indicative of the vast investments that have been devoted to developing and researching adaptive automation in contrast to adaptable automation. In fact, very little attention has addressed adaptable automation and experiments directly comparing adaptable and adaptive automation are particularly scant. To the author’s knowledge, only seven experiments have directly compared these two flexible automation approaches. The automation in one, though, provided prompts when an LOA change should be considered (Kaber & Riley, 1999), in contrast to others. Two experiments imposed a limit on how long the automation’s assistance was available (Bailey et al., 2006; Chen et al., 2017). For the other four experiments, the flexible automation was similar: the unprompted LOA changes in the adaptable condition remained in effect until the human made a subsequent change. Table 2 summarizes the two experiments that compared adaptable automation with performance-based adaptive automation (Kidwell et al., 2012; Sauer et al., 2012; the latter also examined an event-based adaptive trigger). Results from both experiments showed adaptable (human controlled) was more favorable for LOA/task assignment than adaptive (system controlled). The other experiments (Table 3; Li et al., 2013; Ruff et al., 2018) compared performance-based adaptive automation with adaptable automation, in addition to evaluating a hybrid approach in which the adaptive automation was in effect, but the human could override and change LOA, as is possible with adaptable automation. Generally, the results were also more favorable for the adaptable automation in comparison to the adaptive automation. Additionally, many measures showed that the hybrid condition was better than adaptive automation, suggesting that further evaluation of hybrid approaches is warranted.
Summary: Experiments Comparing Adaptive and Adaptable Automation

Note. *p < .05; **p < .01. ns = not significant.
Summary: Experiments Comparing Adaptive, Adaptable, and Hybrid Automation
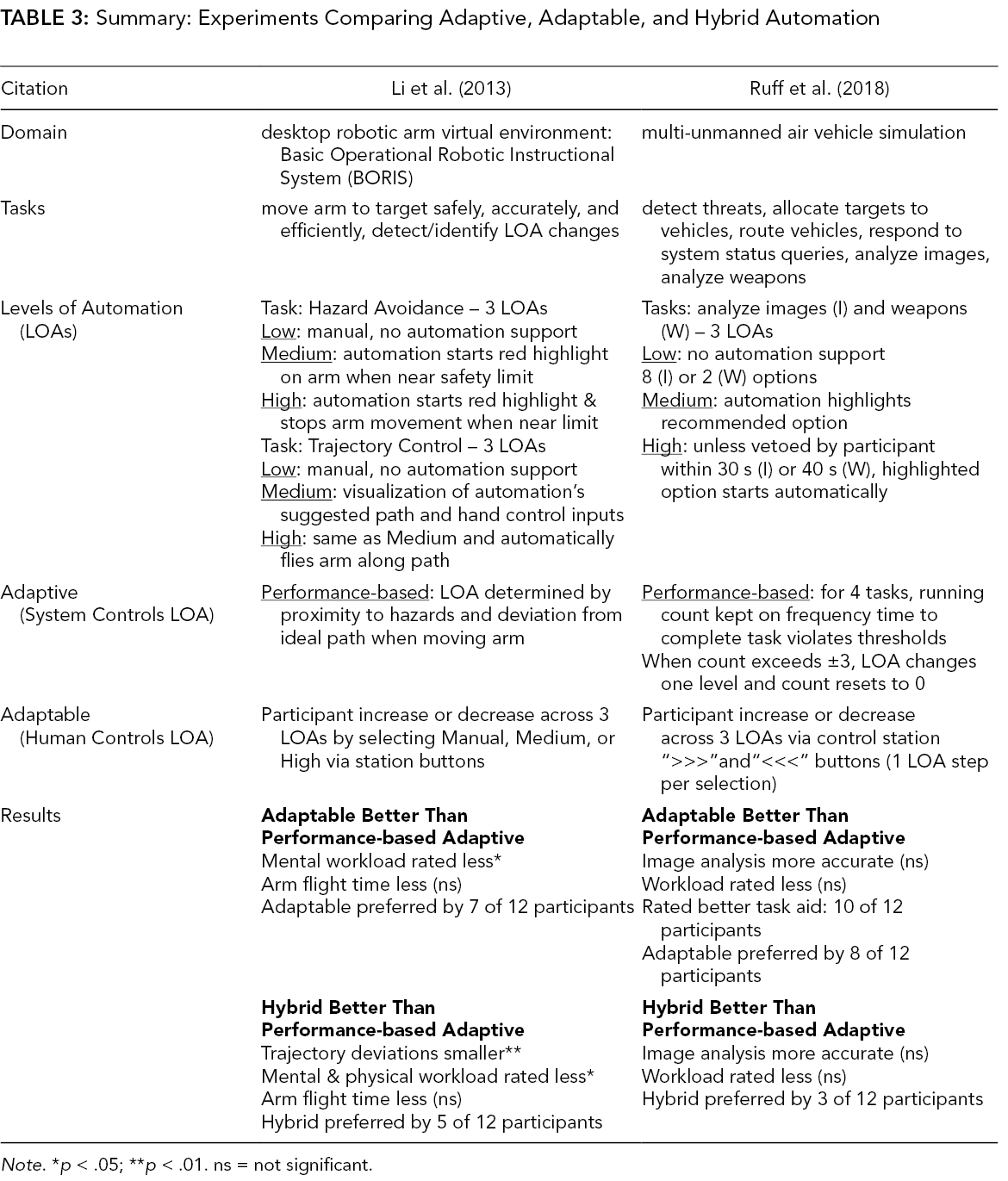
Note. *p < .05; **p < .01. ns = not significant.
Recommended Research
Sheridan’s statement that motivation for human robot interaction research is more “focused on building and demonstrating … than in providing detailed and validated scientific conclusions” (Sheridan, 2016, p. 531) rings true for flexible automation. To date, significant investments have been devoted to exploring adaptive automation in which the system controls the level of automation based on one or more triggers. In contrast, research addressing adaptable automation where the human controls automation level is scant. However, results from the few experiments directly comparing two flexible automation approaches unanimously favor adaptable automation (Tables 2 and 3). Moreover, given the “costs” of adaptive automation (technical sophistication/complexity involved in implementing triggers for automated LOA changes, as well as the potential for decreased human situation awareness and performance, etc.; Sauer et al., 2012), it could be viewed that the human factors community has been negligent in its focus on adaptive over adaptable automation.
Therefore, it is timely to change emphasis to experiments examining the potential contributions of adaptable automation enabled with efficient interface designs. Unless adaptable automation becomes the forefront of human–automation teaming research, the potential benefits of harnessing the unique capabilities of human and automation team members to make collaborative informed, robust, and timely decisions/system inputs may not be realized in future complex systems. Adaptable automation research is critical to evaluate its contribution toward improving system performance by augmenting the human’s pattern recognition ability and intuition/flexibility with automation’s computational/reasoning capabilities without degrading the human’s situation awareness. Specifically, systematic research that compares adaptable automation with adaptive automation for a variety of tasks/application domains, as well as examining hybrid approaches combining the two, is long overdue to address this critical gap. To help guide future flexible automation designs, research is needed to:
Determine the type and number of tasks to be supported by automation as well as the ideal number of LOAs (and incremental differences) for the targeted applications. In most cases, this would involve multiple LOAs, not just automation “on versus off” (see examples in the rows for “Tasks” and “Level of Automation” in Tables 2 and 3)
Directly compare adaptable and adaptive flexible automation for a variety of tasks/application domains. This may involve evaluating instances in which multiple LOAs are continually available as well as when the number of LOAs is limited and/or automation’s assistance is only provided temporarily.
Evaluate hybrid approaches that provide both adaptive and adaptable automation, whereby the LOA of at least one task type is determined with adaptive automation, but that LOA can also be changed by the human.
Results from all of these research areas may actually be applicable to the same multi-task system such that different types of flexible automation are matched to certain subsets of tasks. A spectrum of approaches might even be more appropriate given complex systems will likely be comprised of multiple types of automation, each with unique capabilities and characteristics.
The human’s workload, however, in managing a plethora of automation options would be burdensome unless mitigated, for example, by facilitating the establishment of human–automation working agreements (e.g., Gutzwiller et al., 2017). For effective working agreements to alleviate workload, research is needed to determine optimal controls and displays that enable the human–automation team to:
specify initial LOA/task assignments as well as efficiently modify assignments during system operation
enable efficient coordination on goals and courses of action
clarify roles, determining how workload is to be shared (e.g., depending on operational situation or system state, asset, and/or task)
identify context(s), if any, that adaptive automation has authority to automatically change LOA (e.g., what tasks, LOAs, operational situations, triggers)
support human–automation collaboration, bi-directional communication, and shared awareness of task/system status
Additional Flexible Automation Considerations
Human–automation teaming is ripe for human factors research. Effective design of supportive controls and displays for application environments is especially critical, not only for task delegation/workload sharing, but also to exploit automation’s assistance in collaborating on courses of actions, monitoring task execution/system operation, and managing contingencies. Fortunately, progress has been made on minimizing adaptable automation’s LOA/task assignment workload by extending Playbook delegation pioneered by Miller and Parasuraman (2007) for both single human control of multiple unmanned vehicles (Calhoun et al., 2018) and single pilot-manned aircraft operation (Tokadli et al., 2021). Both enable a human operator to seamlessly transition across low-to-high LOAs and tailor automation depending on the task, situation, human’s trust in the automation, or a unique combination of these factors. These approaches are candidates for expansion to enable combined adaptable/adaptive automation support in complex systems (proposed by Miller et al., 2005), as well as determine their utility in establishing and modifying working agreements across human and automation teammates.
Research targeting flexible automation for human–automation teaming should evaluate candidate interfaces in complex, multi-task test environments, representative of actual applications including simulated or operational automation capabilities. Involvement of current operators is invaluable, both to identify requirements for the targeted domain and provide feedback on prototypes. Future research can also be informed by advancements in tools such as the human–autonomy system oversight model (Endsley, 2017), principles of effective teamwork (Joe et al., 2014), experimental design recommendations (Chen et al., 2017), and proposed measures to record (Pritchett et al., 2014; Sauer & Chavaillaz, 2018).
Key Points
Increasingly, automation (including autonomous agents and intelligent systems) can support tasks normally ascribed to human operators in system operations. The division of labor between the human and automation represented by the current level of automation assigned to each task should ideally be flexible and context dependent.
With flexible automation, each task’s level of automation is either assigned by the human operator (adaptable automation) or by the system (adaptive automation). The locus of authority has tradeoffs: application of adaptable automation compared with adaptive automation may enhance perceived control and mode awareness with potential automation management costs.
Considerably less research has focused on adaptable compared with adaptive automation, despite results showing adaptable automation can enhance system performance and human’s situation awareness, especially with controls/displays supporting efficient human–automation teaming.
This critical gap requires empirical human factors research that evaluates the effectiveness of adaptable automation to efficiently support establishing/modifying working agreements across human and automation team members.
Footnotes
Acknowledgments
The opinions, findings, and conclusions or recommendations expressed in this article are those of the author and do not necessarily reflect the views of the Air Force Research Laboratory or the U.S. Air Force. The author would also like to thank Heath Ruff, Kyle Behymer, and anonymous reviewers for their constructive comments on an earlier version.
Author(s) Note
The author(s) of this article are U.S. government employees and created the article within the scope of their employment. As a work of the U.S. federal government, the content of the article is in the public domain.
Author Biography
Gloria Calhoun is a research psychologist at the Air Force Research Laboratory. Her research focuses on the design and evaluation of controls and displays for Air Force systems, most recently for future highly autonomous unmanned aircraft. She received her MA in human performance from Wright State University in 1984.