
Abstract
Objective
We investigated how the ability to control whether or not to inhibit an action is affected by the response preparation.
Background
The ability to control actions is a central skill to properly behave in complex environments. Increased levels of response preparation are associated with reduced response times, but how they directly affect the ability to control actions is not well explored. We investigated how the response preparation affects the ability to control the generation of actions in the context of a stop selective task.
Method
Participants performed a visuo-motor stop selective task.
Results
We found that an increased level of response preparation reduced the ability to control actions. In the condition with high preparation, we observed shorter response times and increased probability of wrong responses to a request to stop, compared to a condition with a lower level of preparation.
Conclusion
We demonstrated that high response preparation hinders action control.
Application
Understanding the cognitive factors that affect the ability to properly control actions is crucial to develop devices that can be exploited in different contexts such as the aviation, industrial, and military. We demonstrated that subjects’ response preparation is a key factor influencing their ability to flexibly control their reaction to different stimuli. This study offers a suitable paradigm that can be used to investigate which system features in a controlled task promote an optimal balance between response speed and error rate.
INTRODUCTION
Performing a task (for example pressing a button or pointing to a specific target) requires integrating diverse types of information available before the movement starts, a combination of processes called response preparation. The unfolding of these processes requires time, and the movement starts once the response preparation has reached a certain level of activity. A proof for this time-consuming aspect is that if we provide prior information (e.g., about the movement direction through a target) during a Foreperiod before a Go signal, response times to the Go signal are shorter compared to when the information (e.g., about the movement direction) is provided simultaneously with the Go signal. This is because in the condition of prior information, the Go signal will be given when part of the response preparation has already partially unfolded. In daily situations appropriate actions require us to control and update the response preparation depending on the incoming information. In some cases, it may be necessary to suppress a partially prepared response; in others, for example, briefly suspend preparation, evaluate the new information, and then generate the response, if appropriate. This flexibility in controlling action generation is an essential component of our behavioral repertoire and its alteration in critical situations can be dangerous. Critical situations can occur in a variety of contexts. For example, in the military context, investigating the process of response inhibition can be useful in minimizing incidents such as friendly fire during a conflict. Specifically, it has been investigated how (Wilson et. al., 2013) or emotional factors (Head et al., 2017; Wilson et al., 2015), and the presence of visual and auditory feedbacks (Dang et al., 2022; Dang et al., 2018; Neyedli et al., 2011) can influence response inhibition. Another exemplary setting is aviation, where pilots face an uncertain environment and continuous interaction on the flight deck (Çakır et al., 2016; Causse et al., 2013; Reynal et al, 2016) that can overload their working memory capabilities. This can impair pilots’ ability to perform motor actions appropriate to the demands of the environment (Dehais et al., 2017; Risser et al., 2006; Scerbo et al., 2003; Taylor et al., 2005). Therefore, investigating the cognitive architecture behind our action control is necessary, for example, to increase safety in military and aviation contexts.
Some studies have shown that our ability to control actions can be influenced by several factors, among them, the salience of stimuli (Montanari et al., 2017; van der Schoot et al., 2005), the complexity of the tasks demands (Head et al., 2020; Sánchez-Carmona et al., 2021), the degree of feedback reliability (Dang et al., 2022; Neyedli et al., 2011), the training on specific cognitive abilities (Biggs et al., 2015), the influence of emotional factors (Wilson et al., 2015), and the level of response preparation (Correa, et al., 2010; Federico & Mirabella, 2014; Li et al., 2005; Mirabella et al., 2009; Stevenson et al., 2009; Takayose et al., 2016).
Thus far, to the best of our knowledge, very few studies have been done to examine how the level of response preparation could impact performance in more complex tasks that require evaluating the incoming information to inhibit or generate the actions (Brunamonti et al., 2012; Chikazoe et al., 2009; Ficarella et al., 2021; Mirabella et al., 2009; Mirabella et al., 2006; Montanari et al., 2017). To address this topic, we employed the Stimulus-Selective Stop task (Bissett & Logan, 2014; Sánchez-Carmona et al., 2016; Sebastian et al., 2017) which requires a flexible behavioral control. This task is composed of three types of trials randomly presented. In the Go trial, which makes up most of the trials, a Go signal is presented that requires a response to be generated. In the Stop trial, following the Go signal and after a variable time (Stop Signal Delay, SSD) a Stop signal is presented, requiring inhibiting the response. In the other trial type, the Ignore trial, the Ignore signal, is presented instead of the Stop signal. The Ignore signal requires subjects to continue their response to the Go signal. This condition is confusing and demanding for the subjects because it can cause a momentary inhibition before the correct identification of the stimulus. The Go, Stop, and Ignore signals thus create an experimental context in which the subject must continually adapt the response preparation to the different information provided in the various trials. In this context response preparation can be represented as a process that grows towards a threshold once information about movement (e.g. direction) and Go signal are provided (Figure 1(a)). Evolution of response preparation in different task conditions. (a) In Go trials with No-Foreperiod information about movement (e.g., direction) and Go signal are provided together. (b) In Go trials with Foreperiod Information about movement’s direction is provided before the Go signal. (c) In Stop trials: the response preparation can be suppressed and movement inhibited (Correct Stop) if the stop signal is presented soon enough (Stop early), otherwise (Stop late) the movement will be generated (Failed Stop). (d) In Ignore trials there is a temporary suppression of the response preparation process, and then a re-preparation of the response.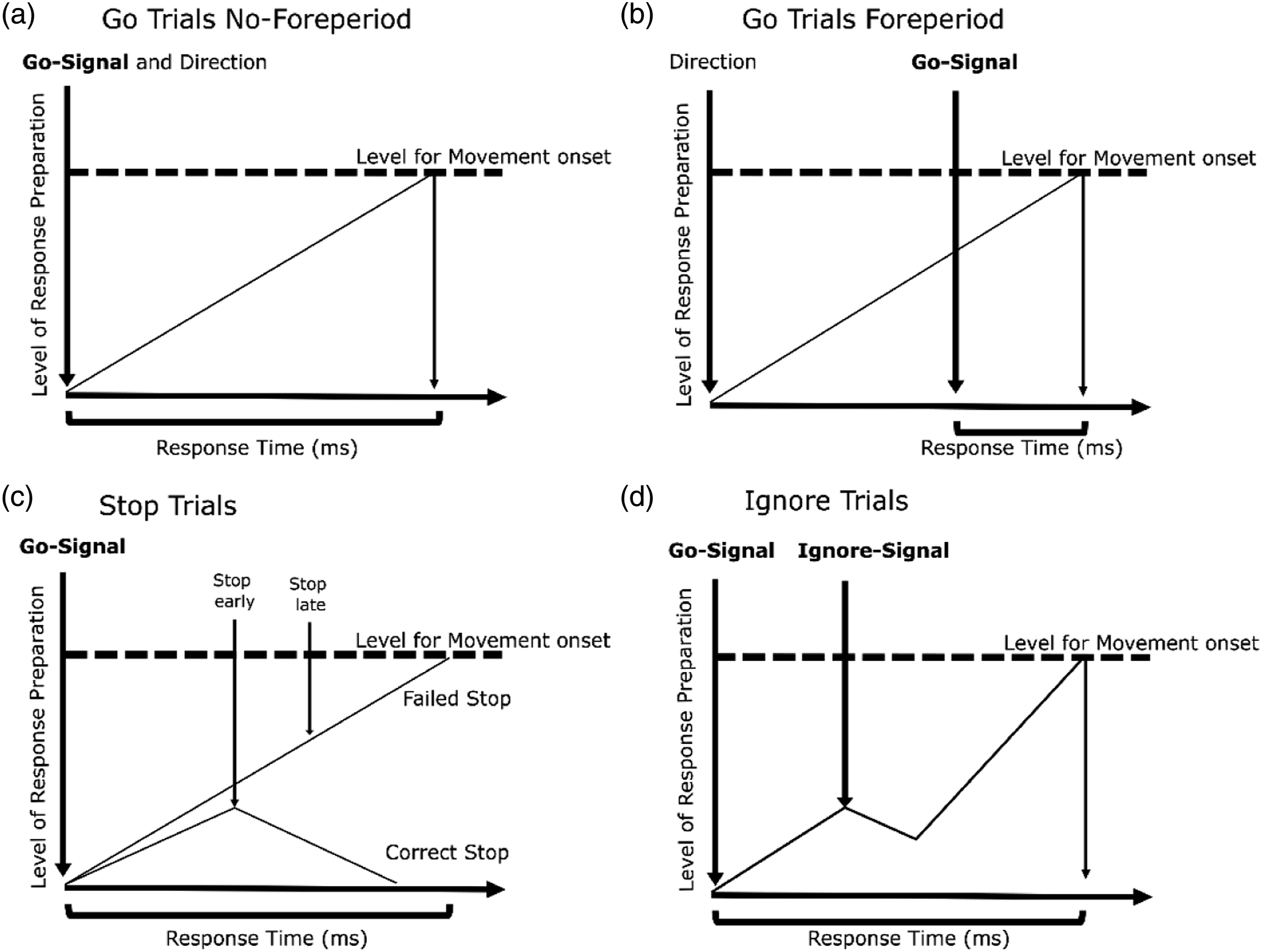
Movement is generated when the threshold is reached following the response time from the Go signal presentation
By performing the Stimulus-Selective Stop task, certain aspects of performance are typically observed. First, the probability of making a mistake (Failed Stop) after the Stop signal time increases as the SSD increases because the passage of time allows for more advanced response preparation (Niemi & Näätänen, 1981; Schall, 2004, see also Figure 1(c)). Second, responses in Failed Stop trials are faster than overall responses in Go trials because very fast responses are more difficult to inhibit (Logan & Cowan, 1984). Third, response times in Ignore trials are often longer than in Go trials because the Ignore signal requires a momentary interruption of response preparation, and then restarting the preparation process (Bissett & Logan, 2014; see also Figure 1(d)).
We employed this task to evaluate how the level of response preparation, modulated by introducing a Foreperiod, affects the ability to selectively control action generation. Specifically, we mixed trials in which the behavioral response could not be prepared before the Go signal (No-Foreperiod, low level of response preparation) with trials in which the behavioral response could be prepared in advance because information about direction was provided before the Go signal (Foreperiod, high level of response preparation). We expected that an increase in the level of response preparation through the introduction of a Foreperiod would generally lead to fewer omissions to Go signals and faster response times in Go as well in Ignore trials; at the same time this would negatively affect the ability to inhibit movements. We further examined how the level of movement preparation affected the movement execution process (i.e., movement times) in Go and Ignore trials.
METHOD
Participants
We estimated the sample size on the basis of a power of 0.9 to detect an effect size in a within-subject design of 0.5, using GPower 3.1.9 (Faul et al., 2009; Faul et al., 2007), on the basis of a previous study that modulated the preparatory phase of movement generation in a similar task (Mirabella et al., 2009; Mirabella et al., 2006). This estimate corresponded to 21. Twenty-three participants (7 Female, 16 Male; mean age 31 ± 6.40) were enrolled in the experiment. All of them were right-handed and had normal or corrected-to-normal vision. All participants gave their informed consent and experimental procedures were approved by the local ethics board and complied with the ethical standard laid down in the 2013 Declaration of Helsinki.
Apparatus and Task
Participants performed a reaching version of the Stimulus-Selective Stop task (Bedard et al., 2003; Bissett & Logan, 2014; Verbruggen & Logan, 2009). They were seated in a darkened and sound attenuated chamber, in front of a 17-inch touchscreen monitor (LCD, 800 × 600 resolution, 60 Hz) 40 cm away. In our version of the task, participants were required to complete three different types of trials presented under two experimental conditions named Foreperiod and No-Foreperiod, respectively. The Foreperiod condition included a long interval (i.e., 1016 ms), between a “ready Signal” (below named Cue) and the onset of a Go signal, instructing participants to perform a reaching movement, while in the No-Foreperiod condition this interval was reduced to an undetectable period of time (i.e., 16 ms).
Task Trials
The task required participants to perform, in each condition, three types of trials: Go trials (Figure 2(a), left sequence), Stop trials (Figure 2(b), middle sequence) and Ignore trials (Figure 2(c), right sequence). Task Trials. Three types of trials were presented, Go trials (a, left sequence), Stop trials (b, middle sequence) and Ignore trials (c, right sequence). Movement cancellation was required only in Stop trials. Depending on the condition (Foreperiod vs. No-Foreperiod) the foreperiod delay duration was set to 16 ms (No-Foreperiod Condition) or to 1016 ms (Foreperiod Condition). CT, Central time, MT, movement time; SSD, Stop signal delay; ISD, Ignore signal delay; PTT, Peripheral Target touch.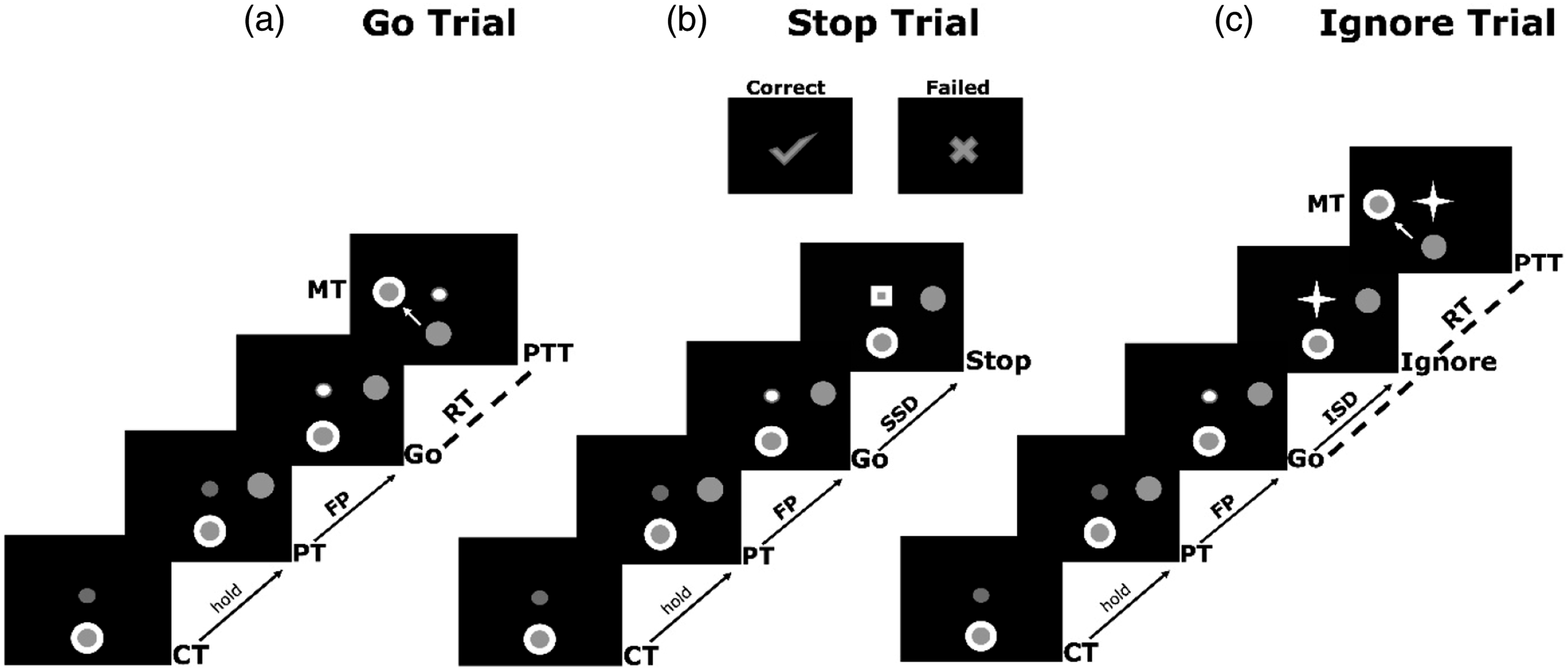
Regardless of trial type, all trial started with the appearance of a Central Target (gray circle, diameter 2 cm) and a Cue signal (gray circle, diameter 1 cm), above the Central Target (center to center distance: 9 cm). Participants were required to touch and hold the hand on the Central Target for a variable time period (816–1016 msec, 66 ms steps). As soon as they held the Central Target, a white circle (2.3 cm diameter) appeared surrounding it, informing participants that they were holding the Central Target properly. Subsequently a Peripheral Target (gray circle, diameter 2 cm) randomly appeared at 1 of 2 possible locations (i.e., 7 cm to the right or left of the vertical midline of the screen).
Go Trials. In Go trials, the Cue signal turned into a green circle (Go signal), instructing participants to release the Central Target and reach the Peripheral Target as fast as possible. Both the Central Target release and the Peripheral Target touch had to occur before an elapsed time limit (i.e., 1216 ms). Once participants touched the Peripheral Target, they had to maintain the new hand position for a variable amount of time (616–816 msec, 66 ms steps). Stop Trials. In Stop trials, following the Go signal, after a variable and unpredictable delay (SSD; values: 16–916 ms, 100 ms steps), a Stop signal (yellow square) replaced the Go signal. In these trials, participants had to keep the hand on the Central Target until the end of the trial (816–1016 msec, 66 ms steps), withholding the response triggered by the earlier appearance of the Go signal.
Ignore Trials. In Ignore trials, an Ignore signal (yellow four-pointed star) replaced the Go signal after a variable delay (Ignore signal delay; values: 16–916 ms, 100 ms steps). In these trials, participants had to respond as they did during Go trials, ignoring the Ignore signal. Thus, these trials were similar to Stop trials except that, in this case, the signal following the Go signal did not require inhibition. No time limit to move was set in Ignore trials.
In Go and Ignore trials, a missed Central Target release within the time limit provided after the presentation of a Go signal was considered as a Go omission; any other missed response (e.g., when participant did not hold enough the Peripheral Target or failed to reach it) was considered an uncompleted trial. In Stop trials, the simple release of the Central Target after the presentation of the Go signal, was defined as an incorrect response Failed Stop), since the participants failed to properly inhibit the ongoing response. Independently of the trial type, a detachment of the Central Target before the Go signal appearance constituted a premature response. In this latter case, the trial was aborted. Visual feedback appeared at the center of the screen at the end of each trial: the appearance of white ellipsis informed participants the trial was aborted, while the appearance of a red cross signaled any other kind of error. Conversely, the appearance of a green check mark informed participants that they performed the trial correctly.
Staircase procedure. To prevent participants from waiting for the Stop/Ignore signal appearance, we used an adaptive staircase procedure to ensure a wide range of delays (i.e., Stop signal and Ignore signal delay). Therefore, in Stop trials the delay was initialized at 16 ms and adjusted adaptively based on the performance in the last Stop trial: after a Correct Stop trial, the delay increased by one step (100 ms) in the subsequent trial, while after Failed Stop trial, it decreased by one step. For each subject, the delay in Ignore trials was equal to the last Stop trial delay, employed in the same condition (Foreperiod vs No-Foreperiod). During the experiment two independent staircases were employed: one for the Foreperiod condition and the other for the No-Foreperiod condition.
In each experimental session the probability of a Go trial constituted 60% of the trials presented, while Stop/Ignore trials probabilities were 20% each. The order of Go, Stop and Ignore trials presentation was fully randomized, so that subjects could not predict the trial type until the appearance of the Ignore or Stop signals.
At the beginning of each experimental session, participants performed a practice block of 36 trials, and received task instructions from the experimenter. Specifically, each participant was instructed to respond as quickly as possible to the Go signal, to withhold the response upon the appearance of a Stop signal and to continue moving when an Ignore signal followed the Go signal. Additionally, the staircase procedure was also explained to participants in order to further discourage a waiting strategy (see Verbruggen et. al, 2019). During the experimental session, each participant performed 4 blocks of 200 trials with a constant inter-trial interval of 950 ms. Stimuli presentation and behavioral events collection were controlled using a MATLAB-based package (https://monkeylogic.nimh.nih.gov/).
DATA ANALYSIS
In this experiment, we considered different variables as follows: (1) the response time to Go signal, (2) the Movement time, (3) the probability of not responding to the Go signal (Go omissions) (4) the probability of erroneously responding (i.e., moving) during Stop trials (p(R)), and (5) the length of the average Stop signal delay. The response time has been computed as the time between the Go signal appearance and the movement onset (i.e., the start of hand movement from off the Central Target), regardless of the appearance of the Ignore or Stop signals, while the movement time corresponds to the interval between the movement onset and the touch of the Peripheral Target. Go omission errors occurred when participants did not remove their hand form the Central Target within the time limit allowed. Conversely, Failed Stop trials corresponded to Stop trials in which participants removed their hand from the Central Target, failing to inhibit the movement triggered by the previous presentation of the Go signal. We further consider as a key measure of performance, the average length of the Stop signal delay: indeed, this interval was adaptively adjusted based on the subject’s performance in the latest Stop trial, lengthening if the latest Stop trial was performed correctly, shortening otherwise. As such, a longer SSD corresponds to a better performance in inhibition because the movement can be inhibited even if the Stop signal is presented when the response preparation is already advanced, all the other parameters (response time and probability or erroneous responding) being equal. All these variables were analyzed through repeated measures analysis implemented by means of custom-made MATLAB scripts and MATLAB built-in functions.
RESULTS
Influence of Response Preparation on Response and Movement Times
The goal of this experiment was to evaluate the effect of different levels of response preparation on the ability to correctly generate, execute, and suppress goal-directed movement. We first considered how the length of the Foreperiod delay affected the response times and the movement times. We analyzed the response times using a two-way repeated measures ANOVA with factors Condition (Foreperiod; No-Foreperiod) and Trials (Failed Stop, Go, and Ignore). We found a significant main effect for Condition, F (1,20) = 31.17; p < 0.001; η
2
p
= 0.61. Indeed, we observed overall shorter RTs in the Foreperiod condition compared to the No-Foreperiod condition (Figure 3). Response times (Mean and ± 1SE) are presented as a function of Task conditions and type of Trial.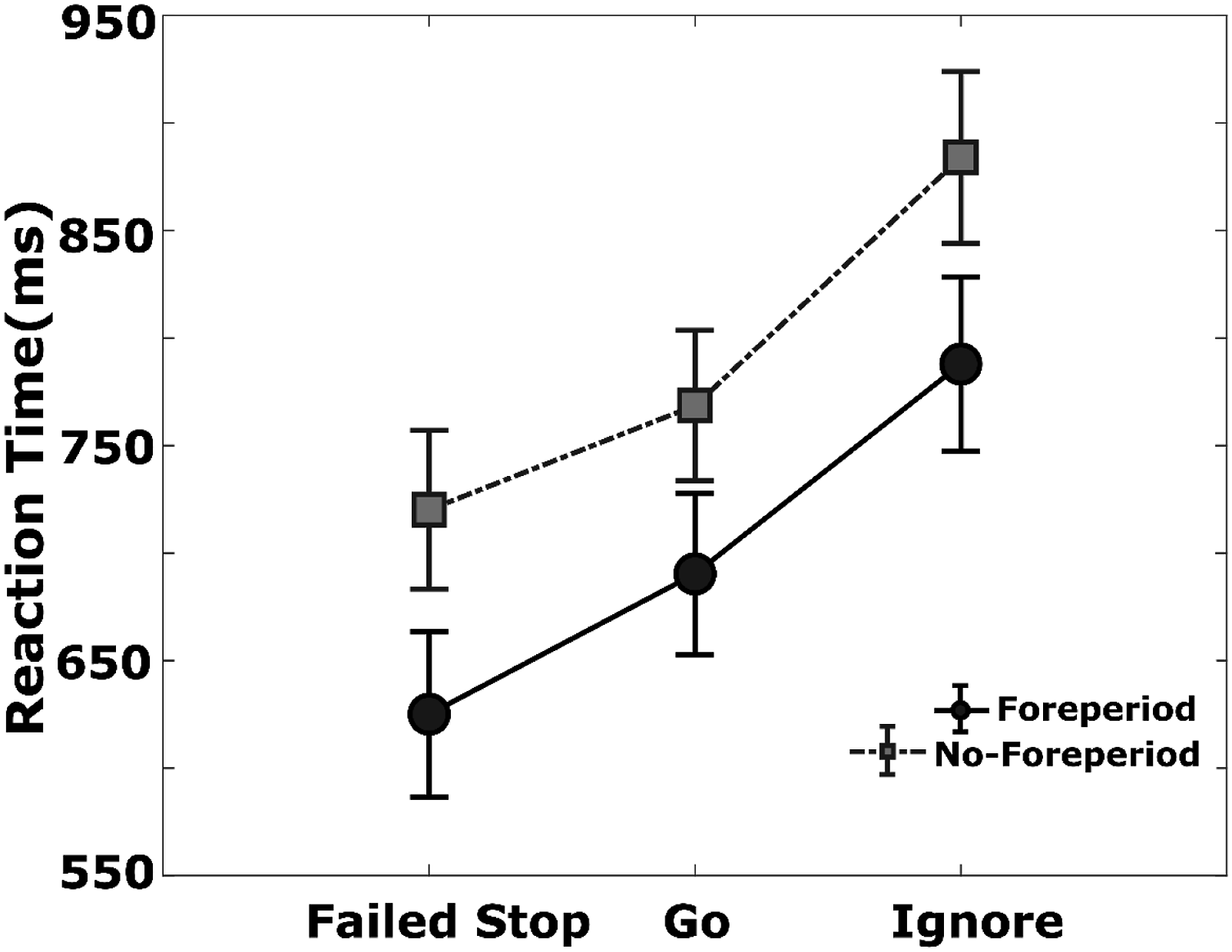
These results confirm and extend previous findings on the effect of the level of response preparation on response time, suggesting that the higher the level of response preparation, the faster the reaction to a Go signal.
In addition, we found a significant main effect of the factor Trial, F (2,40) = 172.9; p < 0.001, η
2
p
= 0.89, with response times being shorter in Failed Stop trials (Foreperiod M = 625 ms; No-Foreperiod M = 720 ms), becoming longer in Go trials (Foreperiod M = 690 ms; No-Foreperiod M = 768 ms), and longest in Ignore trials (Foreperiod M = 787 ms; No-Foreperiod M = 883 ms). The interaction between factors was not significant, F (2,40) = 1.35, p = 0.27, η
2
p
= 0.06, indicating that the level of response preparation equally affected the response times observed in all the trial types. We then analyzed the effect of response preparation on the movement time (Figure 4), that is the time it took to execute the planned movement. To this purpose, we performed a two-way repeated measures ANOVA with factors Condition (Foreperiod; No-Foreperiod) and Trials (Go and Ignore). We did omit the Failed Stop trials because in this type of trial the subjects did not touch the Peripheral Target; indeed, they were always able to halt the movement before touching the Peripheral Target. This analysis yielded no significant main effect for Condition, F (1,20) = 0.44, p > 0.05, η
2
p
= 0.02, indicating that the level of response preparation did not affect the movement time as a main factor. However, we found a significant Interaction effect F (1,20)= 6.17, p < 0.05, η
2
p
= 0.23, and a significant effect of the factor Trial, F (1,20) = 44.63, p < 0.001, η
2
p
= 0.69; movement times were shorter in Go trials (Foreperiod M = 350 ms; No-Foreperiod M = 353 ms), compared to the Ignore Trials (Foreperiod M = 376 ms; No-Foreperiod M = 371 ms). Movement Times (Mean and ± 1SE) are presented as a function of Task conditions (Foreperiod; No-Foreperiod) and type of Trial (Go; Ignore).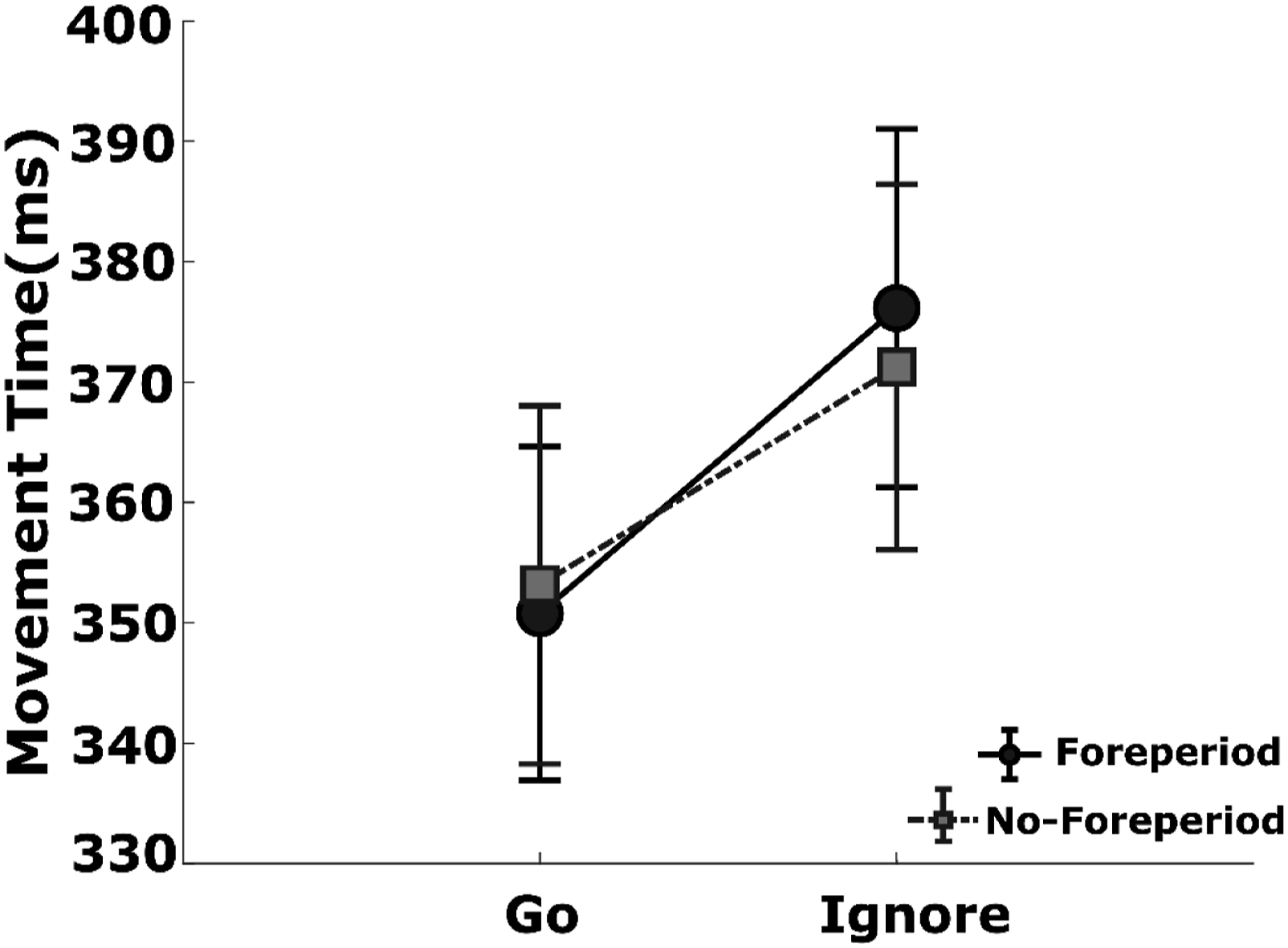
The post-hoc analysis confirmed that there was a difference between Go and Ignore trials for both conditions, showing that this difference was greater for Foreperiod than for No-Foreperiod. Therefore, movement time increased in the Ignore trials, presumably due to the restart of response preparation having a carry over effect on movement execution. Moreover, this increase was greater in the Foreperiod condition than in the No-Foreperiod condition, perhaps because a higher level of response preparation in the Foreperiod condition may require an additional increase in control during movement execution in Ignore trials.
To further investigate the effect of the level of response preparation on movement generation, we considered the probability of not responding to the Go signal. Indeed, Go omissions are often observed in the Stop-Signal task, reflecting the attempt to maintain stopping accuracy by strategically slowing down the responsiveness in general. We thus expected to observe a lower number of Go omissions in the Foreperiod compared to No-Foreperiod condition. In fact, in the first condition, when the Go signal is presented, the preparation level should be higher, facilitating the generation of the response. Accordingly, we performed a one-way ANOVA with the factor Condition (Foreperiod; No-Foreperiod) on the number of Errors (Go Omissions), showing that the effect of Condition was significant, F (1,40) = 11.24, p < 0.01, η 2 p = 0.21. As expected, we found that the number of Go omissions was smaller in the Foreperiod (M = 3.9) than in the No-Foreperiod (M = 20.4) condition. In summary, these data show that increasing the level of response preparation shortens response time and reduces the likelihood of omitting a response, demonstrating subjects’ higher tendency to generate a movement. Furthermore, the response preparation can affect the movement time depending on the trial (Go vs Ignore) together with the Condition (with higher differences between Go vs Ignore trials in the Foreperiod).
The Level of Response Preparation Affects Movement Inhibition
We then evaluated the effect of response preparation on the ability to properly inhibit a planned movement. To investigate how the inhibitory process is affected we focused on the overall performance in Stop trials. We compared the proportion of Failed Stop trials (p(R)), between conditions (Foreperiod; No-Foreperiod) by means of t-test (Figure 5). (a). Probabilities to respond to the Stop-Signal (Mean and ± 1SE) & (b). Average Stop-Signal delays (SSD) (Mean and ± 1SE); are presented as a function of Task conditions (Foreperiod; No-Foreperiod).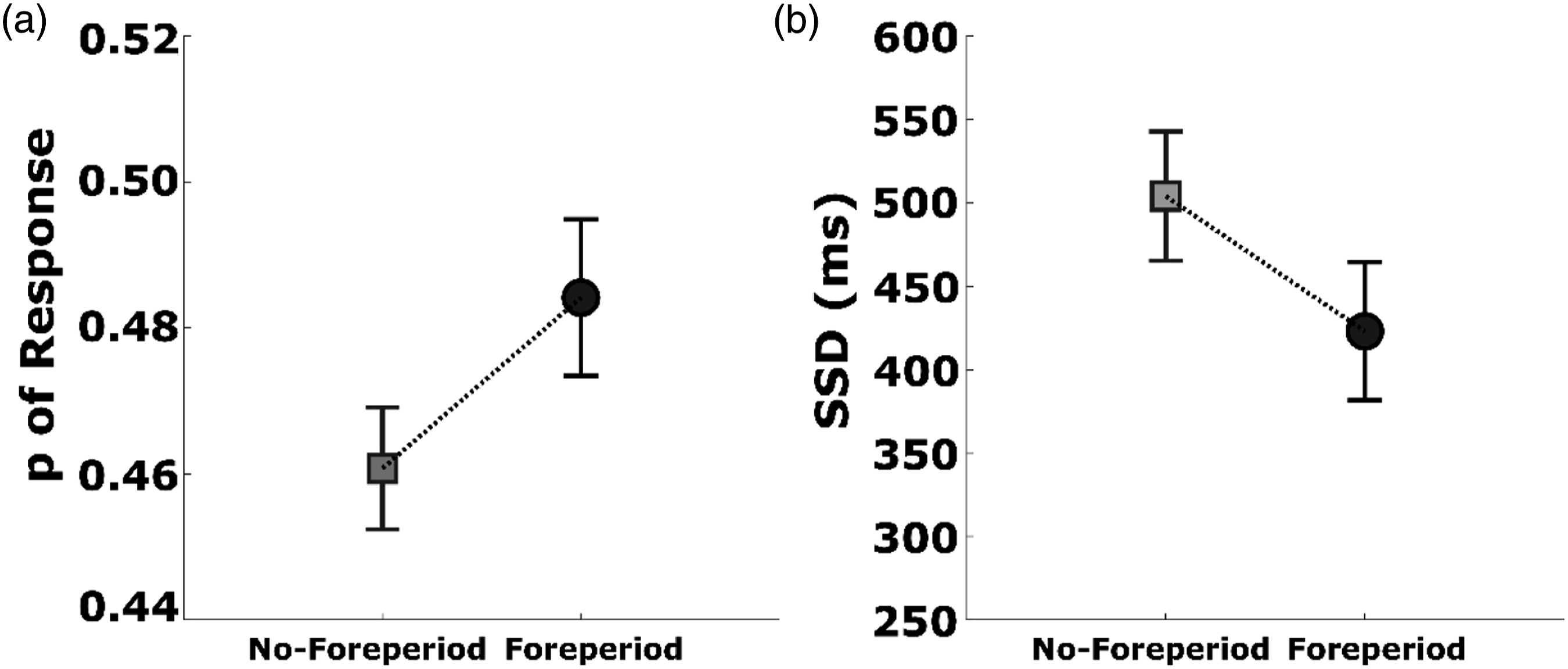
We observed that the ability to inhibit a planned movement was reduced with higher levels of response preparation. Indeed, the proportion of Failed Stop trials was greater during the Foreperiod (p(R) M = .48, SD = 0.04) compared to the No-Foreperiod (p(R) M = .46, SD = 0.03) condition
DISCUSSION
The aim of this study was to investigate how the level of response preparation influences different aspects of actions control. We were able to increase the level of response preparation by introducing a longer Foreperiod delay before the Go signal appearance in the Foreperiod condition vs the No-Foreperiod condition. This manipulation is not new in the field of cognitive and motor studies, and we further confirmed its robustness in modulating response preparation (Niemi & Näätänen, 1981; Schall, 2004). We observed that increased response preparation affected different aspects of the cognitive control of action. The response time to the Go signal was significantly shortened in all the experimental conditions by the presence of a Foreperiod, as a consequence of the advanced level of motor preparation. We did not observe such a strong effect on movement time, although the movement time was slowed down by the Ignore Signal and this effect was enhanced during the states of higher response readiness (Figure 5). These results indicate that the preparatory state occurs mainly before the movement generation. However, accurate goal-directed movements require additional preparatory processing during the actual execution, and the latter stage does not just reflect a ballistic stage free from control processes (Mirabella et al., 2008). Indeed, the presence of the Ignore signal was able to lengthen this movement execution stage, especially in the condition of higher response preparation. Different theories suggest that the complete specification of the motor command occurs before the movement starts (Harris & Wolpert, 1998; Scott, 2004; Wong et al., 2015). Nevertheless, recent evidence started to challenge this idea, demonstrating that movement kinematics can be refined during the execution phase, in order to shorten the response time to an imperative stimulus (Orban de Xivry et al., 2017; Weinberg, 2016). As such, one possibility is that the Ignore Signal, by interrupting for a moment the preparation phase, interferes more strongly with the motor planning (see also Figure 1(d)), thus requiring a further processing during the execution of the movement.
The enhanced response preparation by the Foreperiod strongly affected the ability to inhibit actions. We first observed that under higher levels of movement preparations (Foreperiod condition) participants were less likely to miss responses to the Go signal. Response omissions in Go trials are likely to reflect the attempt to maintain stopping accuracy, by slowing down the general level of responsiveness (i.e., speed-accuracy trade-off; Forstmann et al., 2011; Hsieh & Lin, 2017; Starns & Ratcliff, 2010), and to ensure a proper inhibition as demanded by the Stop signal. Furthermore, the probability to make errors in Stop trials increased in the Foreperiod condition whilst the average SSD was reduced; these results reflect the higher tendency to erroneously respond to Stop signal. The increased difficulty in inhibiting movement that follows a higher level of response preparation is in line with the speed-accuracy trade-off effect (Bogacz et al., 2010; Dang et al., 2018). This effect is typically observed when humans adapt their behavior to specific environmental demands and contingencies: speed can be prioritized over accuracy or vice versa.
We believe that our results have important practical implications, offering a suitable paradigm to study factors influencing cognitive control in different environments, such as aviation, military, and industrial contexts. In these contexts, a better understanding of factors affecting the ability to flexibly control behavior is essential to reduce error rates. To our knowledge only very few studies have investigated cognitive aspects applied to aviation and military operation: one study looked at the impact of signal’s reliability on the likelihood of inhibition and response times, determining how a trusted signal system can assist in reducing response times and Failed Stops (e.g., Dang et al., 2022). Mistakes in aviation can have serious consequences, and it is important to attempt to minimize the error rate for greater safety and/or reduced user frustration/distress (Jordan, 1998). In the industrial context the development of electronic devices (i.e., human-machine interfaces and operator interface terminal) allows the operators to interact with the automated system as efficiently as possible. While the advantages of automation in speeding up the production process and reducing the required workforce are undeniable, human operators remain a key component of the system (Rogers et al., 2019). Accordingly, behavioral, emotional, and cognitive factors have been demonstrated to be crucial in making automation systems less vulnerable to failure (Lee & Seppelt, 2009). Among the cognitive factors, the modulation of response preparation plays a crucial role in balancing the speed-accuracy trade-off (Spieser et al., 2017). Our results highlight that the level of motor preparation is a key component that influences the ability to flexibly control actions. Giving a subject the time to prepare a response led to shorter response times and lower probabilities of errors of omission, which is crucial in situations where the subject is required to respond as fast as possible. However, it is important to highlight that the increase in reaction speed and the reduction of omission errors occurred at the expense of the ability to inhibit ongoing response when required. Future research should investigate the critical time window in which rare events (like the Stop and the Ignore signals) are more likely to be detected and processed in order to find an optimal balance between response speed and the ability to online correct and eventually countermand the ongoing response. As a matter of fact, our study enables us to integrate additional knowledge in the human factor and ergonomics domains for a better application of devices, since previous studies have focused more on graphical interface aspects (Orphanides & Nam, 2017; van Zon et al., 2019), and less on the cognitive control processes underpinning the action.
A limitation of this study lies in the fact that we investigated only the control of reaching-pointing movements towards visual targets. However, we think that these findings should be interpreted in order to learn more about how the level of motor preparation influences different aspects of goal-directed action. Therefore, future research could focus on executive functions using different human-computer interaction systems that may also require different movements, as well as on improving current information on the cognitive aspects underlying these interactions (van Zon et al., 2019).
KEY POINTS
Few studies have investigated the cognitive motor control in complex tasks In this investigation we found that the level of response preparation affects the motor control exerted during a stop selective task: the higher the response preparation the faster the reaction to the stimuli, the lower the ability to control Modulation of response preparation should be considered to influence the ability to control actions when designing specific devices