
Abstract
Objective
The effects of asset degradation on trust in human-swarm interaction were investigated through the lens of system-wide trust theory.
Background
Researchers have begun investigating contextual features that shape human interactions with robotic swarms—systems comprising assets that coordinate behavior based on their nearest neighbors. Recent work has begun investigating how human trust toward swarms is affected by asset degradation through the lens of system-wide trust theory, but these studies have been marked by several limitations.
Method
In an online study, the current work manipulated asset degradation and measured trust-relevant criteria in a within-subjects design and addressed the limitations of past work.
Results
Controlling for swarm performance (i.e., target acquisition), asset degradation and trust (i.e., reliance intentions) in swarms were negatively related. In addition, as degradation increased, perceptions of swarm cohesion, obstacle avoidance, target acquisition, and terrain exploration efficiency decreased, the latter two of which (coupled with the reliance intentions criterion) support the tenets of system-wide trust theory as well as replicate and extend past work on the effects of asset degradation on trust in swarms.
Conclusion
Human-swarm interaction is a context in which system-wide trust is relevant, and future work ought to investigate how to calibrate human trust toward swarm systems.
Applications
Based on these findings, design professionals should prioritize ways to depict swarm performance and system health such that humans do not abandon trust in systems that are still functional yet not over-trust those systems which are indeed performing poorly.
Keywords
INTRODUCTION
Swarms comprise assets that coordinate behavior based on their nearest neighbors (Kolling et al., 2015). Nature is full of organisms that naturally behave through these constraints, such as ants (Hecker & Moses, 2015) and wasps (Tindo et al., 2008), and researchers have explored how shepherds, sheepdogs, and sheep coordinate, lead, and follow via swarming behaviors (Abbass & Hunjet, 2021). Roboticists and psychologists have leveraged natural swarm constraints in designing robotic swarms (Kolling et al., 2015) and investigated what contextual features shape human-swarm coordination (Walker et al., 2016). The present research focuses on trust in human-swarm interaction (HSwI) and replicates and extends work (i.e., Capiola et al., 2020; Hamdan et al., 2021) on the effects of asset degradation on human trust toward swarms through the lens of system-wide trust (SWT) theory (Keller & Rice, 2010).
Humans often struggle to interpret the behaviors of complex autonomous systems (Lewis et al., 2021) such as robotic swarms (Roundtree et al., 2019; cf. Deka et al., 2021). HSwI represents a unique class of human-robot interaction (HRI) given that swarms comprise many entities versus one referent that a human can monitor/evaluate. Judgments in relation to the overall swarm behavior can be challenging as inferences made about the swarm’s performance may be uncertain given task priorities and contextual constraints. Yet, humans vary in their abilities to interpret autonomous system behaviors and performance. For instance, humans can recognize patterns in complex dynamical systems such as swarm rendezvous behavior amidst 90% noise (Walker et al., 2016), and swarms trained to hide their leaders fool neural networks but are recognized by human observers at almost the same accuracy as without concealment (Deka et al., 2021). In other contexts, humans show little competence in detecting when and the extent to which swarms experience asset degradation (Capiola et al., 2021). One of the dangers associated with inaccurate swarm perceptions is that the human could engage in inefficient state transitions for the swarm (Lewis et al., 2012). Variance in human performance given task and contextual variability necessitates investigation into what features humans are more apt to leverage in shaping their trust toward swarms. This will assist display designers in their efforts to facilitate calibrated trust in HSwI and in designing displays intended to reduce swarm complexity.
Trust in Human-Swarm Interaction
Lee (2001) discussed the importance of trust in HSwI. As swarms are complex and often unpredictable, human trust—a willingness to rely on said systems (Lyons & Guznov, 2019; Mayer et al., 1995)—in HSwI contexts comprising uncertainty and vulnerability will be critical. When a person trusts, they anticipate desired outcomes as the result of the vulnerability they will assume toward a referent system (Chiou & Lee, 2021; Lee & See, 2004). In situations where a human does not have total control over the referent system, appropriate trust (i.e., [not] trusting when you should [not]) will influence successful interactions. As the behavior of non-human referents (e.g., automation, robots, autonomy), let alone their motivation, is often opaque, psychologists investigate what features influence trust toward machine systems (e.g., Chiou & Lee, 2021; Hancock et al., 2021; Lyons et al., 2021). To situate the current research perspective, we reference Hoff and Bashir’s (2015) model, which explicated factors that influence human trust variability toward automated machine systems. Specifically, dispositional factors of the trustor (e.g., people’s tendency to trust in general), situational factors (i.e., environmental influence, operator’s mental state), and learned features from a past or ongoing interaction with an automation system shape dispositional, situational, and learned trust, respectively, and its resultant consequences. The present research focuses on features of dynamic learned trust, investigating human perceptions of complex swarm systems as well as how swarm behaviors affect human trust.
HSwI represents a unique class of HRI for two reasons. First, humans often monitor the reliability of machines when evaluating trust, yet for swarms, it may be very difficult to accurately monitor and perceive the reliability of individual entities given the sheer number of assets under one’s supervision. Even in human-automation interactions where there is just one referent for a human to monitor/evaluate, humans can develop inaccurate views of the automation’s reliability (Guznov et al., 2016; Rovira et al., 2007). Second, given their governing local control laws, it can be challenging for humans to understand and anticipate the swarm’s behavior. Projection is an important transparency feature that enables trust (Chen et al., 2018). In a HSwI study, simulations that projected where swarm assets would be after a participant issued a command helped participants overcome latency issues associated with a delay between command issuance and swarm execution (Walker et al., 2012).
People ascribe generalizations toward whole systems based on perceived degradation in system components (Keller & Rice, 2010). This “system-wide” trust describes how lowered trust in independent components can bleed over to whole systems. Keller and Rice showed that operators decreased their trust toward entire flight systems when one system component decreased in reliability. Operators checked two gauges while monitoring an unmanned flight simulator. The reliability of one gauge was degraded, while the other was not. Results showed that rather than maintaining trust in the reliable gauges (component-specific trust), operators’ trust toward the entire system decreased (SWT). These findings were replicated with four- (Rice & Geels, 2010) and eight-gauge systems (Geels-Blaire et al., 2013), the latter showing the SWT threshold might reside near 70% reliability (see also Geels et al., 2011). Rice et al. (2016) showed that in hypothetical vignettes, participants’ trust in automation underlying various airplane functions (e.g., autopilot system) degraded when the reliability of one component’s automation (i.e., oxygen masks) was depicted as failing. These findings were replicated in a rental car scenario where the malfunction of the fuel capacity sensor’s automation decreased participants’ trust in the automation controlling other car components (e.g., cruise control).
Swarm functionality may be robust to the loss of some assets due to their underlying control algorithms (Kolling et al., 2015). Yet, it was unclear how observable asset loss, regardless of its objective performance impact, affected human trust toward swarms. Based on this, researchers began investigating the effects of component asset degradation on trust toward swarms. Capiola et al. (2020) instantiated a novel manipulation in a swarm simulator developed by Walker et al. (2012). Based on the findings from Nam et al. (2017), in which visual features influenced peoples’ trust toward swarms, and the postulates of SWT theory (Keller & Rice, 2010), Capiola et al. (2020) hypothesized and found support for a negative relationship between depicted asset degradation and trust toward the entire swarm.
Hamdan et al. (2021) sought to extend Capiola et al.’s (2020) work with two modifications: first, participants could offer a swarm redirection once per trial and were incentivized for their performance. Second, by measuring trustworthiness, trust, and behaviors, Hamdan et al. (2021) assessed the trust process as explicated in organizational (Mayer et al., 1995) and human factors (Chiou & Lee, 2021; Lee & See, 2004) psychology. Hamdan et al. (2021) showed that trustworthiness perceptions of and trust toward swarms were positively correlated, but there was no relation with these criteria and the time at which participants offered a redirection per trial; nor were these criteria affected by the degradation manipulation, potentially due to an underpowered sample.
There are some potential limitations in Capiola et al. (2020) and Hamdan et al. (2021). First, they did not include a control condition for comparison with other levels of asset degradation. Second, they depicted degraded assets with a red cue. It is unclear whether people would offer ratings in accordance with the assumptions of SWT (Keller & Rice, 2010) should the red degradation cue be absent—they may not even notice the degradation. This is a practical consideration as swarm operators may lack visual cues that signal an asset has degraded from its normal behavior. Lastly, task-specific swarm performance was not controlled to cleanly investigate the effect of asset degradation on trust toward swarms. In Capiola et al. (2020), trials that comprised the least and most asset degradation also depicted swarms collecting the least and most targets in the foraging task, respectively. While the degree of asset degradation was strictly controlled, swarm task performance still varied widely across the degradation levels—which likely influenced participants’ trust evaluations. In Hamdan et al. (2021), as participants could input a redirection once per trial, target acquisition could have varied for each participant in each trial.
The present research addresses these limitations by a) including a control condition (i.e., 0% asset degradation trial), b) not depicting degraded assets in red, making it more challenging to detect degradation, and c) controlling for the number of targets each swarm fully identified across repeated measures. These latter two modifications facilitated an experiment that separated the effects of asset degradation from a red visual affordance and controlled for the effect of target acquisition on trust, respectively.
The Present Research
The present work controls for target acquisition across all trials to isolate the effect of asset degradation on trust. Even though objective target acquisition was constant, observing features of a swarm’s trajectory (e.g., assets going in varying directions) might affect people’s perceptions of a swarm’s exploration efficiency, or the degree to which swarms minimize extraneous foraging behaviors, and ultimate ability to acquire targets, which has implications for SWT (Keller & Rice, 2010). The present work also assesses whether participants preferred swarm algorithms to their own ability to identify targets in an ostensible future foraging task. The present experiment supports the evaluation of three research questions:
Controlling for target acquisition, what is the relationship between asset degradation and perceptions of the swarms’ effectiveness in acquiring targets?
Controlling for target acquisition, what is the relationship between asset degradation and perceptions of the swarms’ terrain exploration efficiency?
Do people choose to rely on the swarm algorithms or control the swarms themselves in a target foraging task? When swarms experience degradation, their objective cohesiveness (uniformity of asset dispersal) and obstacle avoidance (avoiding no-fly zones) is reduced (Capiola et al., 2020; Hamdan et al., 2021). People attend to visual features to derive swarm trustworthiness (Liu et al., 2019; Nam et al., 2018), and qualitative data show people do attend to swarm cohesiveness (Capiola et al., 2021) and obstacle avoidance (Capiola et al., 2020). As such, perceived cohesiveness and obstacle avoidance will be negatively related to objective degradation. Therefore, the hypotheses in the current work are:
Controlling for target acquisition, there is a negative relationship between asset degradation and perceptions of swarm cohesion.
Controlling for target acquisition, there is a negative relationship between asset degradation and perceptions of swarm obstacle avoidance. Finally, based on the postulates of SWT (Keller & Rice, 2010) and past research (Capiola et al., 2020), the present work hypothesizes:
Controlling for target acquisition, there is a negative relationship between asset degradation and trust toward swarms.
METHOD
Design
In a within-subjects design, 75 participants viewed seven unique, randomized simulations of flocking swarms foraging for targets. Each simulation displayed varying degrees of asset degradation, the independent variable. For clarity, asset degradation in the current study refers to the proportion of swarm asset degradation, not degradation in task-specific performance (i.e., the number of targets collected by the swarm). After each experiment trial, self-reported responses to attention checks, perceptions of swarm features, and reliance intentions were assessed. After all experiment trials, the reliance behavior question was administered.
Simulator
The simulator (Walker et al., 2012) was produced in Microsoft Visual Studio 2017. Simulator parameters were adapted to investigate the effects of asset degradation on HSwI (Capiola et al., 2020, 2021; Hamdan et al., 2021). For all scenarios, the swarm comprised 256 assets per past work of Capiola et al. and Hamdan et al. Parameters (i.e., percent of asset degradation, time at which degradation occurred, targets, no-fly zone coordinates) were specified in a text file. Swarms always began in the center of the digital landscape, oriented, and began flocking via consensus. As swarms flocked, more of the environment was revealed (i.e., a terrain landscape sized at 500 m). Each simulation was recorded using the Xbox Game Bar built into Windows 10.
The environment comprised hidden targets, which functional swarms were to acquire, and no-fly zones (depicted in red) they were unable to penetrate. When a target was in the vicinity of a flocking swarm, it was partially identified and displayed in purple. Once fully acquired, it was displayed in green. To control for the influence of swarm target acquisition performance, each swarm fully identified five targets in each experimental trial. In the practice trials, non-degraded assets were displayed in white while degraded assets were displayed in red. In all experimental trials, the assets were displayed in white. Participants were quizzed after training on the color of these aspects to ensure they were able to distinguish relevant features. Degraded assets could pass through no-fly zones, signaling a state inconsistent with a swarm’s control laws, and continue on their specified velocity until the end of the trial. For a detailed representation of the experimental stimuli, see Figure 1. Screenshots of degradation at the end of each 90-second experiment trial for each level of asset degradation. Note. Each experiment trial depicted exactly five targets fully acquired (green square) by a unique swarm experiencing one of seven levels of percentage degradation (the independent variable); trials were randomized to reduce order effects.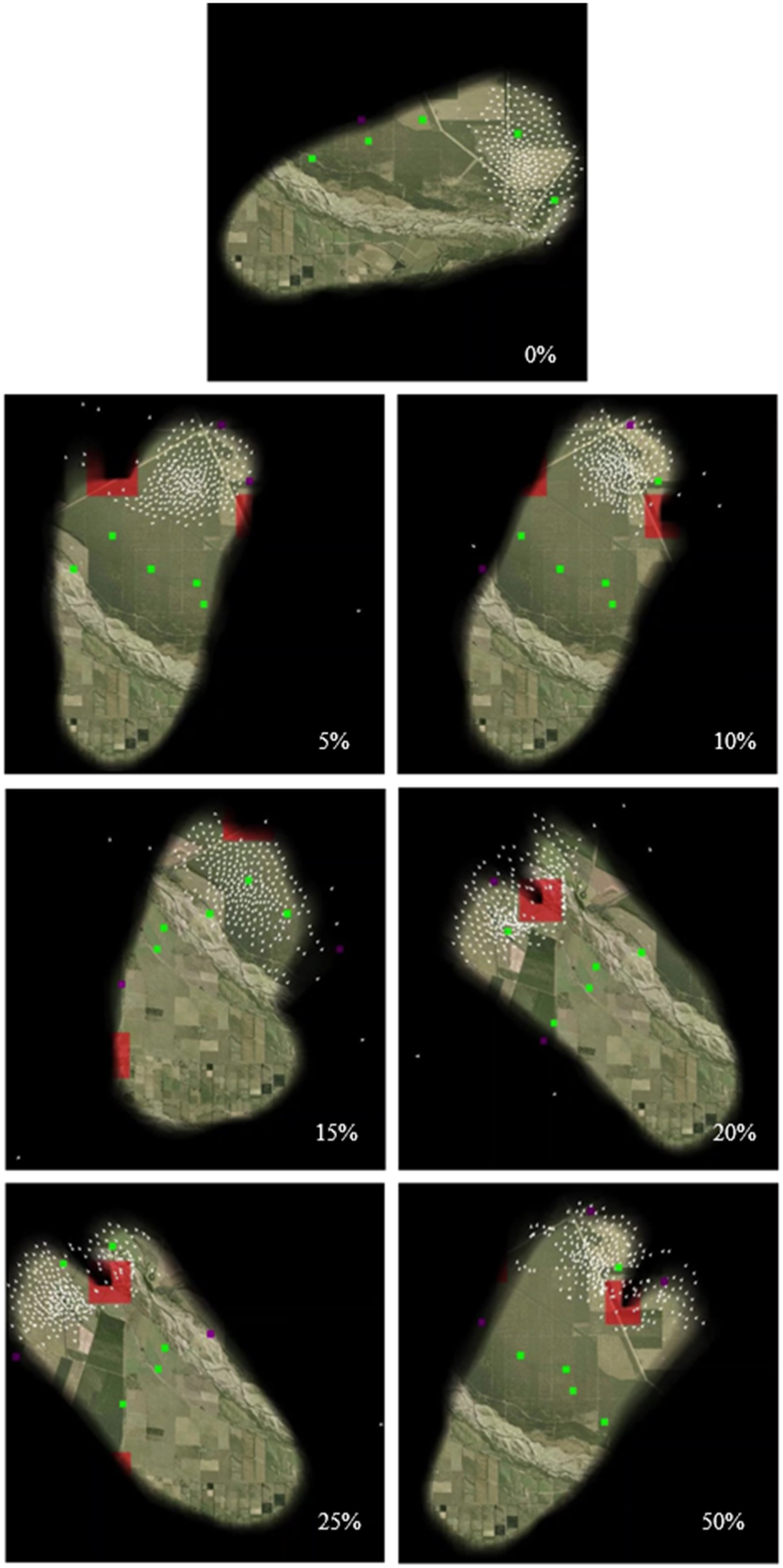
A Priori Power Analysis
An a priori power analysis was conducted in G*Power (Faul et al., 2009). We converted the η2 from results from Capiola et al. (2020) to Cohen’s f = .26, with 80% power (α = .05), entered their nonsphericity correction, ε = .72, and calculated their correlation among repeated measures of their criterion, r = .26, with one group (within-subjects) over six measurements. Leveraging these parameters across seven measurements to incorporate the control condition, the present research required an N of 28.
Participants
Without knowing whether the present study modifications would decrease the effect size of the asset degradation manipulation, we erred on the side of caution and sampled 75 participants from Amazon Mechanical Turk (MTurk) and leveraged CloudResearch (Litman et al., 2017). Participants registered in the MTurk system self-nominated to participate in this study after reading a brief study description. Participants affirmed they were at least 18 years old and reside in the United States before agreeing to participate.
After the data were cleaned (see Data cleaning section), data from 70 participants were subject to further analyses. Participants were aged 21 to 62 years (M = 36.84). On average, the task took 39 minutes and 42 seconds to complete (SD = 8 minutes, 58 seconds). Each participant was compensated $4.50 for their participation and $.10 for every target that a swarm acquired in the experiment trials, incentivizing participants to critically evaluate their trust toward swarms. As each video was pre-recorded, every participant who completed the task appropriately was compensated the same amount (i.e., $3.50 bonus).
Independent Variable
Except for the addition of the 0% degradation trial and refraining from depicting degraded assets in red, the present research followed the manipulation scheme used by Capiola et al. (2020) and Hamdan et al. (2021). The focal manipulation was the percent of assets degraded per trial. Seven trials (each comprising a unique swarm simulation) were presented, with 0, 5, 10, 15, 20, 25, and 50% of the assets degrading 30 seconds into a 90-second trial. Only one degradation occurred per trial. Trials were randomized for every participant.
Dependent Variables
Perceptions of Swarms
Based on qualitative data from Capiola et al. (2020, 2021), participant agreement on whether each swarm a) had assets that worked together as a cohesive unit (i.e., “The swarm had assets that worked together as a cohesive unit”), b) successfully avoided obstacles (i.e., “The swarm successfully avoided obstacles”), c) was effective in collecting targets (i.e., “The swarm was effective in collecting targets”), and d) explored the terrain efficiently (i.e., “The swarm explored the terrain efficiently”) was assessed. These questions were administered after each trial. Participants responded to each item on a 7-point Likert scale (1 = strongly disagree, 7 = strongly agree).
Reliance Intentions
Intentions to rely on (i.e., trust) each swarm were assessed with Lyons and Guznov’s (2019) 10-item Reliance Intentions Scale after each trial. The scale was adapted so that the swarm was the referent (sample item: “I would rely on the swarm without hesitation”). Participants responded to each item on a 7-point Likert scale (1 = strongly disagree, 7 = strongly agree). The scale was reliable (αs ≥ .93) across all levels of the independent variable.
Reliance Behavior
After completing all experiment trials, participants read they had a chance to (ostensibly) complete a final target foraging task. Participants responded to the question “In the upcoming target foraging task, do you choose to rely on the swarm’s algorithms or control the swarm yourself” by choosing to rely on the swarm’s algorithms or control the swarm [themselves].
Data Cleaning
After each trial, the attention check “How many targets did the swarm fully identify in the previous trial?” was administered to ensure participants were attending to the task. Participants whose responses were off by more than one target in two or more trials were jettisoned from subsequent analyses. The careless package (Yentes & Wilhelm, 2021) in RStudio (2020) was used to identify participants who had consecutive identical (long-string) responses (Curran, 2016). The minimum page time cut-off was calculated by multiplying the number of items on each page by 2 seconds (Huang et al., 2012). If participants were flagged two or more times on the long-string index or page time cut-off they were removed from the dataset. A total of five participants were removed based on these criteria, indicating a lack of attention and/or careless responding in the experiment.
Procedure
Participants clicked a link taking them to a custom website to complete a brief demographic survey. Next, they were presented with a PowerPoint providing background information on the utilities for which swarms are being explored (e.g., search and rescue) and the reason for degradation (e.g., weather interference). However, in this study participants were told that the swarms’ goal was to identify as many targets as possible and the reason for degradation was unknown. Participants were instructed to monitor swarms, answer questions, and told they would be compensated for each target the swarms fully identified. Participants completed three 90-second practice trials where they directed a single drone to search for targets in an unknown space to familiarize them with the target acquisition task. In addition, three 90-second practice trials of the swarm foraging were presented in a fixed order (i.e., 15, 5, and 25% degradation). Degradation took place 30 seconds into each trial and degraded assets turned red “to highlight the behavior of degraded assets”. A comprehension quiz was assessed to ensure participants understood the task. Then participants viewed seven randomized recordings of unique swarms foraging for targets with different proportions of assets degrading (see Figure 1). Participants were unaware of the number of targets hidden in the environment. After each 90-second experiment trial, participants answered self-reports. Finally, participants chose whether they would like to control a swarm on their own or rely on a swarm’s underlying algorithms in a final target foraging task. Following this, participants were debriefed and navigated back to the MTurk website to enter a completion code for compensation.
RESULTS
Means (Standard Deviations) for Perceived Target Acquisition, Exploration, Cohesion, and Obstacle Avoidance, and Reliance Intentions at Each Level of Degradation (0, 5, 10, 15, 20, 25, 50%)
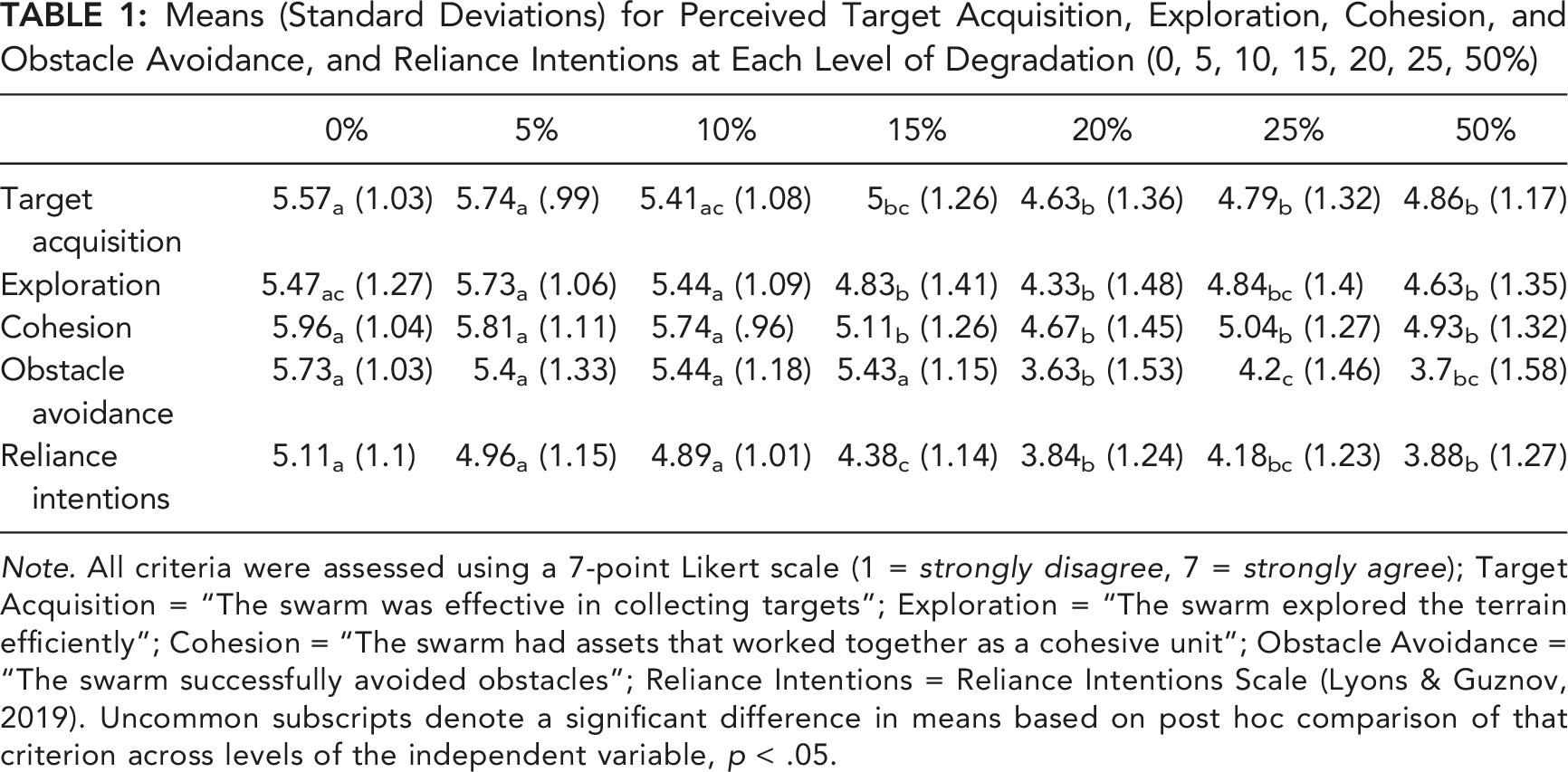
Note. All criteria were assessed using a 7-point Likert scale (1 = strongly disagree, 7 = strongly agree); Target Acquisition = “The swarm was effective in collecting targets”; Exploration = “The swarm explored the terrain efficiently”; Cohesion = “The swarm had assets that worked together as a cohesive unit”; Obstacle Avoidance = “The swarm successfully avoided obstacles”; Reliance Intentions = Reliance Intentions Scale (Lyons & Guznov, 2019). Uncommon subscripts denote a significant difference in means based on post hoc comparison of that criterion across levels of the independent variable, p < .05.
Per RQ1, asset degradation had a significant effect on participants’ perceptions of swarms’ ability to collect targets, F(4.62, 318.68) = 17.80, p < .001, η2 = .205; see Figure 2. Post hoc comparisons showed participants perceived swarms effective at acquiring targets more at 0 and 5% degradation compared to 15, 20, 25, and 50% degradation, and 10% degradation compared to 20, 25, and 50% degradation, ps < .01. The effect of asset degradation on perceived swarm target acquisition. Note. Perceived target acquisition ability of swarms (estimated marginal means) at different levels of degradation (N = 70); error bars depict standard errors.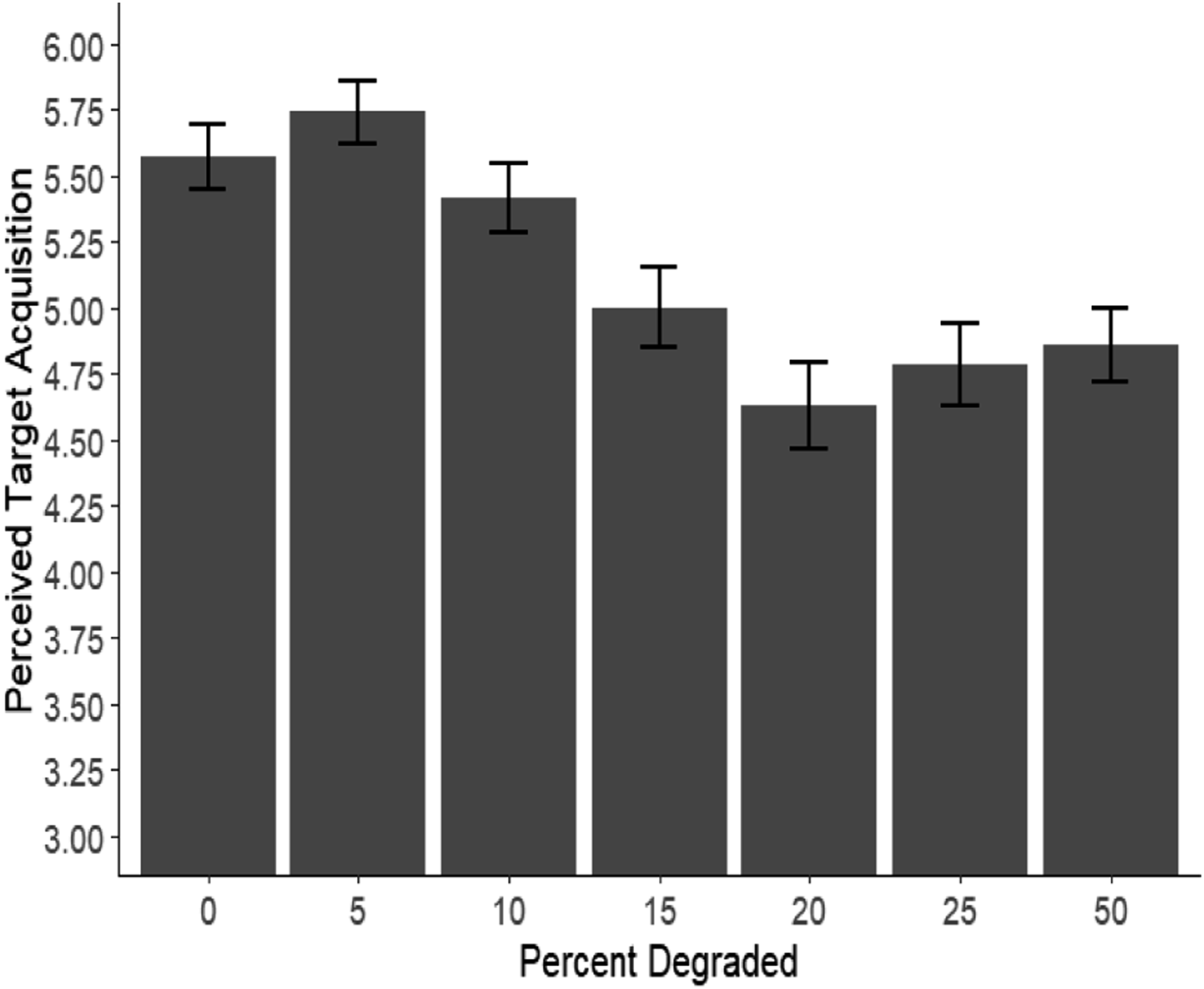
Per RQ2, asset degradation had a significant effect on participants’ perceptions of swarms’ ability to explore the landscape, F(4.78, 329.90) = 15.36, p < .001, η2 = .182; see Figure 3. Post hoc comparisons showed participants perceived swarms explored the terrain efficiently more at 5 and 10% degradation compared to 15, 20, 25, and 50% degradation, and 0% degradation compared to 15, 20, and 50% degradation, ps < .05. The effect of asset degradation on perceived swarm exploration. Note. Perceived exploration ability of swarms (estimated marginal means) at different levels of degradation (N = 70); error bars depict standard errors.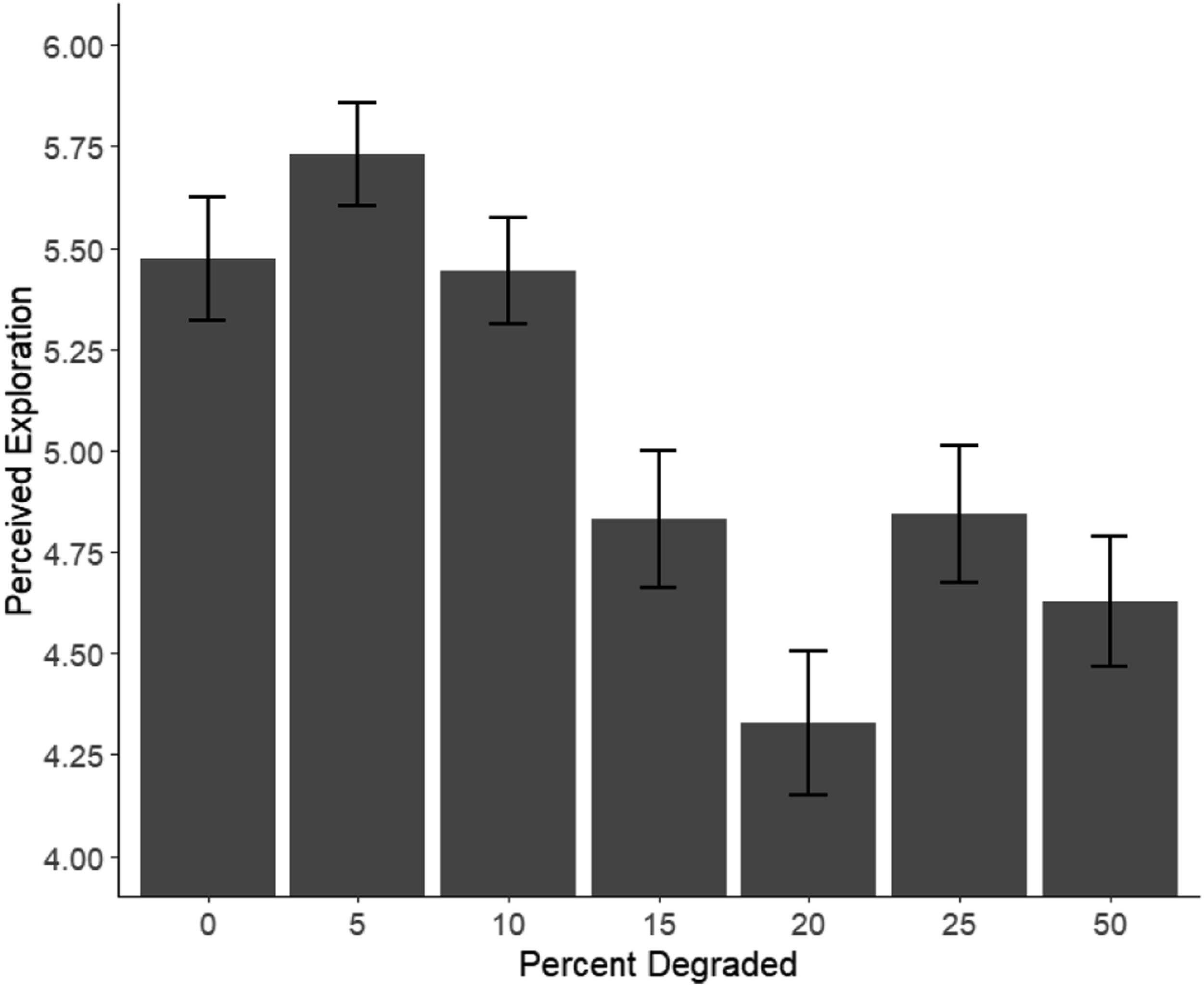
Per H1, asset degradation had a significant effect on participants’ perceptions of swarms’ cohesion, F(4.95, 341.29) = 17.64, p < .001, η2 = .204; see Figure 4. Post hoc comparisons showed participants perceived swarms worked as a cohesive unit more at 0, 5, and 10% degradation compared to 15, 20, 25, and 50% degradation, ps < .01. H1 was supported. The effect of asset degradation on perceived swarm cohesion. Note. Perceived cohesiveness of swarms (estimated marginal means) at different levels of degradation (N = 70); error bars depict standard errors.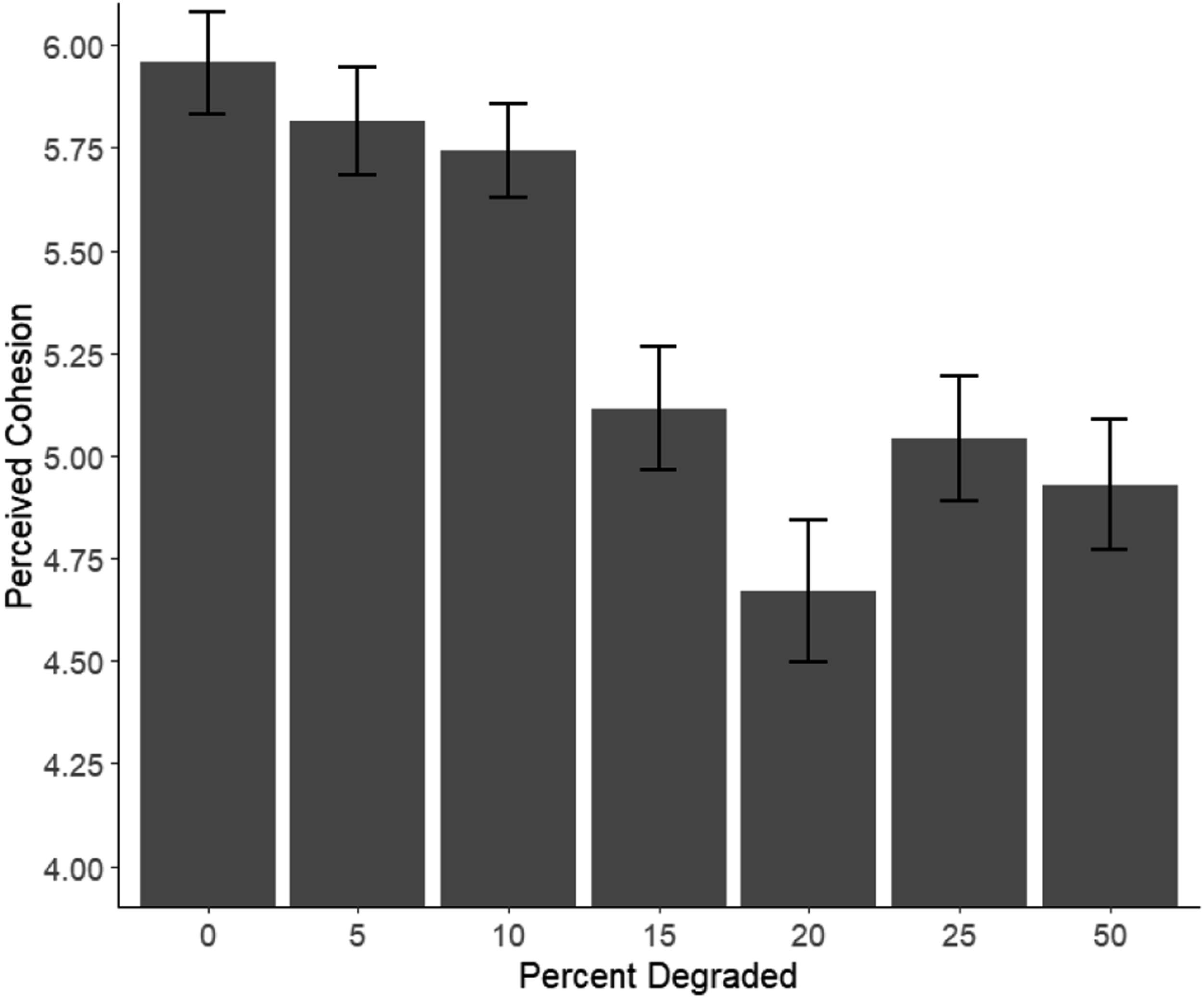
Per H2, asset degradation had a significant effect on participants’ perceptions of swarms’ ability to avoid obstacles, F(4.93, 340.27) = 46.29, p < .001, η2 = .402; see Figure 5. Post hoc comparisons showed participants perceived swarms successfully avoided obstacles more at 0, 5, 10, and 15% degradation compared to 20, 25, and 50% degradation, and 25% degradation compared to 20% degradation, ps < .05. Apart from this lattermost comparison, H2 was supported. The effect of asset degradation on perceived swarm obstacle avoidance. Note. Perceived obstacle avoidance ability of swarms (estimated marginal means) at different levels of degradation (N = 70); error bars depict standard errors.
Per H3, asset degradation had a significant effect on participants’ intentions to rely on swarms, F(4.66, 321.38) = 26.39, p < .001, η2 = .277. It is evident in Figure 6 that there is a negative relationship between asset degradation and intentions to rely on the swarm. Post hoc comparisons showed reliance intentions were significantly greater at 0, 5, and 10% degradation compared to 15, 20, 25, and 50% degradation, and 15% degradation compared to 20 and 50% degradation (ps < .05). H3 was supported. The effect of asset degradation on reliance intentions. Note. Intentions to rely on swarms (estimated marginal means) at different levels of degradation (N = 70); error bars depict standard errors.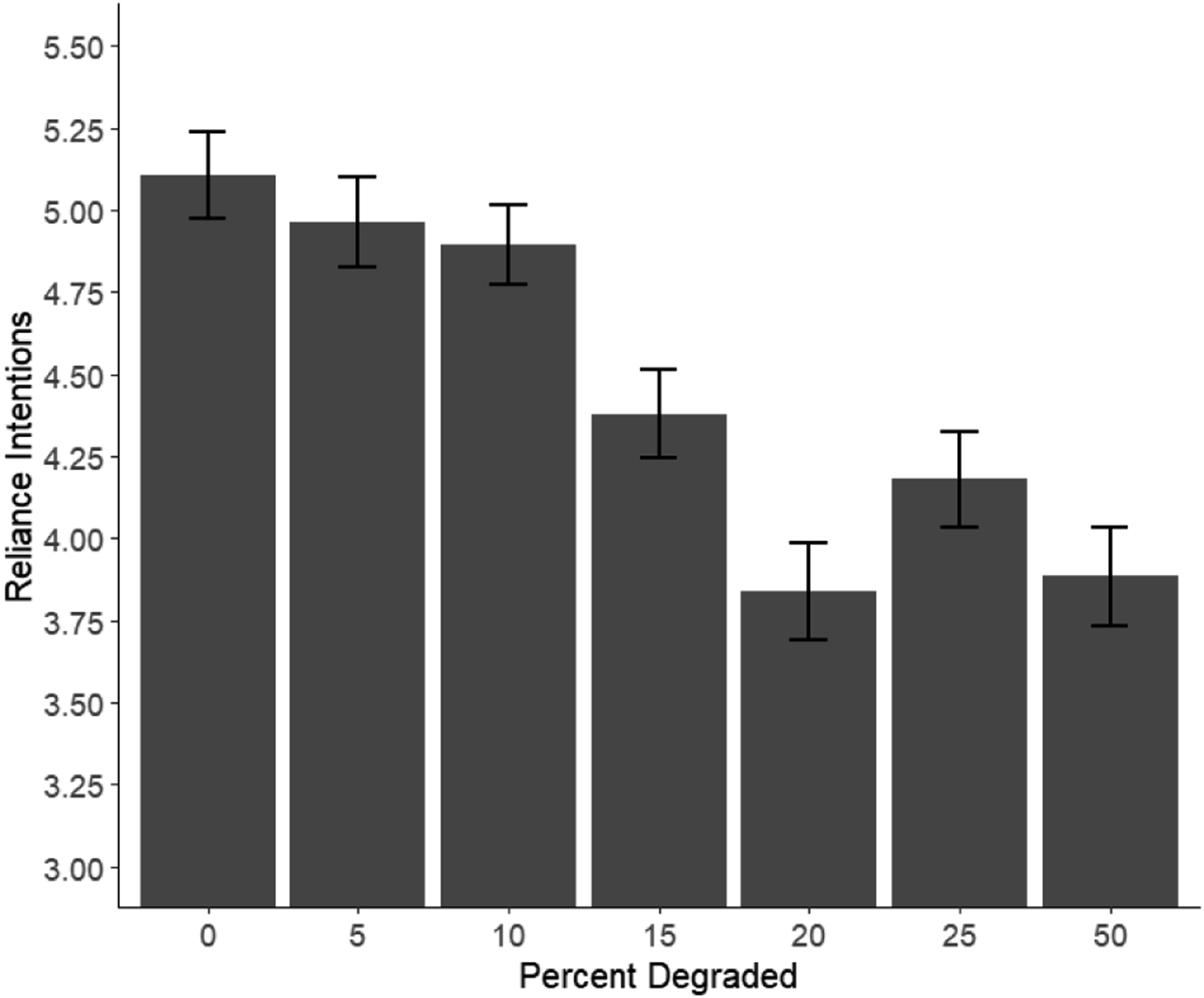
Per RQ3, 29 participants wanted to control the swarm themselves and 41 participants wanted to rely on the swarm’s algorithms in the (ostensible) final foraging task. A Chi-Square goodness of fit test was conducted to determine whether these proportions were equal and found they did not differ significantly, χ2 (1, 70) = 2.0571, p = .15.
DISCUSSION
Swarm technologies may extend human capabilities in various tasks, yet they come with potential challenges in the form of HSwI complexities. Given these complexities, it is imperative that researchers understand and isolate the factors that influence trust of swarms as trust will influence when and how operators of swarms offer control inputs to the swarm – which may ultimately be appropriate or inappropriate (Lewis et al., 2012, 2021). The current work investigated the effect of asset degradation on trust in swarms. The findings showed that controlling for swarm performance (i.e., target acquisition), asset degradation and trust in swarms were negatively related variables. As degradation increased, participants were less willing to rely on (i.e., trust) a swarm. In addition, as degradation increased, perceptions of swarm cohesion, obstacle avoidance success, target acquisition efficiency, and terrain exploration efficiency decreased. While the former two findings pertain to peoples’ perceptions of swarm features that are related to objective performance, the latter findings (coupled with the reliance intentions criterion) provide additional evidence for the presence of SWT (Keller & Rice, 2010) in HSwI and replicate and extend past work on the effects of asset degradation on trust in swarms (Capiola et al., 2020). That is, participants had lower intentions to rely on the swarm in a future foraging task and perceived the swarm to acquire those targets less effectively and explore the terrain less efficiently, even though asset degradation did not impact target acquisition objectively. Pertaining to the first two research questions, there was a negative relationship between degradation and human perceptions of swarm performance (i.e., target acquisition, exploration). Performance perceptions are a meaningful construct in the trust process and shape trust and reliance behaviors (Lee & See, 2004). Moreover, visual aspects of the system, irrespective of their effect on task-specific performance, influence trust toward the whole system, which demonstrates the importance of SWT in HSwI (Keller & Rice, 2010). These findings have implications for deploying swarm systems, as human perceptions of said systems are shaped by features other than objective task-relevant performance.
The current study extended prior research (Capiola et al., 2020; Hamdan et al., 2021) by omitting a color affordance in experiment trials, controlling for target acquisition, assessing reliance intentions in a more comprehensive manner, implementing more detailed training regarding the swarms, and using an appropriately powered sample. The extension strengthens the conclusion that the presence of SWT in HSwI is not dependent on a confounding red interface affordance or objective swarm performance. Moreover, the robust results may be attributed to assessing the full Reliance Intentions Scale, bolstering participant training, and collecting an appropriate sample, all of which are best practices that can be used in future replications and extensions of this work. Indeed, an adequate sample based on a priori power analysis may have resulted in large effect sizes for criteria of interest (η2s > .14).
Per the RQs, controlling for objective target acquisition, increased asset degradation does negatively affect perceptions of swarms’ ability to collect targets and explore terrain. However, there was no statistical evidence showing that people preferred swarm algorithms over their own control for a final foraging task which is indicative of individual differences in trust preferences. Choosing to rely on a system’s underlying algorithms rather than controlling said system would indicate behavioral reliance, which aligns with conceptualizations of the trust process in human-automation interaction (Chiou & Lee, 2021; Lee & See, 2004; Lyons & Guznov, 2019). We speculate this difference may have been significant had participants viewed more trials with 0% degradation, as six out of seven trials comprised swarms experiencing some degradation. Increasing the number of trials with non-degraded swarms would test this speculation.
The current results suggest that SWT (Rice & Geels, 2010) may be more pervasive than initially expected in HSwI. Based on post-hoc comparisons, people may have a lower threshold (85–90%) for SWT effects in HSwI compared to the 70% reliability conditions leveraged in the literature (Geels-Blair et al., 2013; Geels et al., 2011). This is an important finding for if practitioners were to design display features intended to integrate swarm assets into a unified cue such as a glyph or symbol, they would need to understand the thresholds that guide dynamics associated with these interface features (e.g., moving from green to yellow to signify some degradation). The prior 70% threshold noted in the literature may be insufficient to capture trust dynamics for swarms. Future work on HSwI should investigate these thresholds with possible moderators (e.g., situational risk, operator personality traits) to determine boundary conditions when SWT is differently relevant, which has implications for operator training and selection in HSwI.
Limitations and Future Research
The current research has limitations. First, swarms were not equipped with repair algorithms shown to influence trust (Liu et al., 2019). Future research could examine the role of asset degradation when the swarm assets can repair some of their degradation. Trust repair algorithms could represent one mechanism to promote responsiveness of the swarms which is believed to be a key trust influence (Chiou & Lee, 2021). Second, there were no robust leaders in the swarms. All of the assets followed the same local control laws (nearest neighbor algorithms; Kolling et al., 2015). Relational hierarchies influence the effectiveness of swarm dynamics (Tian et al., 2020); therefore, future research should examine how the presence of swarm leaders influences overall trust of the swarm in the context of asset degradation. Third, the interactions used in the current study were passive (i.e., participants were observers of the swarm rather than actively managing the swarm with control interfaces). Physical manipulation interfaces can influence HSwI (Dehio et al., 2022), and future research might examine how dynamic directable affordances influence trust in swarms. It is plausible that higher perceived control of the swarm (and the swarm’s responsiveness to said control inputs) will garner greater trust (Chiou & Lee, 2021; Endsley & Kiris, 1995; Johnson & Bradshaw, 2021). Relatedly, future research may explore interface affordances which display different types of information pertaining to swarm performance that better calibrate human trust toward swarms. For instance, reducing granularity in displaying swarm behavior while swarm performance remains “acceptable” may reduce distrust, while an affordance displaying greater granularity when performance drops below a certain threshold may suffice in communicating degradation to an operator to reduce over-trust (Lee & See, 2004). Some display features may be differently effective at calibrating trust, however, as the threshold for appropriate swarm performance changes across contexts and task objectives. Trust is a dynamic process (Guo & Yang, 2021) and any interface features that intend to guide the trust process must be sensitive to these dynamics. However, a first step is knowing what thresholds to use for guiding the design of the display features. This is not to detract from this approach, but it is beyond the scope of the current study and should be investigated in future research. In addition, self-reported colorblindness was not treated as an exclusion criterion. Rather than rely on Ishihara colorblindness results assessed online, we implemented a comprehension quiz, which tested participants’ discrimination of different color targets, assets, and no-fly zones post-training. However, future research may wish to collect data in-person to avoid this work-around. Finally, participants perceived swarms avoided obstacles more so at 25 compared to 20% degradation. As this pattern was the only significant post hoc comparison of its kind, it may be spurious.
CONCLUSION
Swarms pose unique interaction challenges as humans have historically evidenced difficulty in accurately judging swarm reliability and intuiting their behavior (Capiola et al., 2021; Lewis et al., 2021). Swarms lack a one-to-one translation between machine reliability and task-relevant performance, which adds complexity. Despite these challenges, the present research showed that humans are sensitive to objective variations in asset degradation which may offer insight into the amalgamation of swarm behavior. Independent of swarm performance (i.e., number of targets acquired), asset degradation appears to be important for human trust. These variations manifest (in the current simulation) in terms of movement characteristics and asset cohesion—which were noted in qualitative data as factors important for swarm trust and degradation detection (see Capiola et al., 2020, 2021). Given the potential for swarms to extend human capabilities, research should continue to examine the factors that shape HSwI.
KEY POINTS
Recent studies have investigated the effect of swarm asset degradation on human trust through the lens of system-wide trust theory, but these studies have limitations. The current research addressed the limitations of past research and found that controlling for performance, asset degradation and trust in swarms were negatively related variables. Several other negative relationships were found between the asset degradation manipulation and perceptions of the swarm. System-wide trust is relevant in human-swarm interaction, and future research ought to investigate how to calibrate human trust in swarm systems as these systems become more commonplace for commercial and military use.
Footnotes
FUNDING
This research was supported, in part, by the Center of Excellence funded by the Air Force Office of Scientific Research and the 711 Human Performance Wing to Carnegie Mellon University (contract # FA-9550-18-1-0251) and Air Force Research Laboratory (contract # FA-8650-16-D-6616).
ETHICAL APPROVAL
Distribution A. Approved for public release; distribution unlimited. AFRL-2022-1422; Cleared 23 March 2022. The views expressed are those of the authors and do not necessarily reflect the official policy or position of the Department of the Air Force, the Department of Defense, or the U.S. government. No potential conflict of interest was reported by the authors. This study was approved by the Air Force Research Laboratory Institutional Review Board.
August Capiola is a Research Psychologist in the Collaborative Teaming Section within the 711th Human Performance Wing at Wright-Patterson Air Force Base, Ohio. He earned his PhD in Human Factors and Industrial/Organizational Psychology at Wright State University in 2018.
Izz aldin Hamdan is a Research Analyst in the Collaborative Teaming Section within the 711th Human Performance Wing at Wright-Patterson Air Force Base, Ohio. He earned his MPS in Industrial/Organizational Psychology at George Mason University in 2021.
Joseph B. Lyons is a Principal Research Psychologist within the 711 Human Performance Wing at Wright-Patterson AFB, OH. He earned his PhD in Industrial/Organizational Psychology from Wright State University in Dayton, OH, in 2005.
Michael Lewis is a professor in the Department of Informatics and Networked Systems and Intelligent Systems Programs in the School of Computing and Information at the University of Pittsburgh. He earned his PhD in Psychology from the Georgia Institute of Technology in 1986.
Gene Alarcon is a Senior Research Psychologist in the Collaborative Teaming Section within the 711th Human Performance Wing at Wright-Patterson Air Force Base, Ohio. He earned his PhD in Industrial/Organizational and Human Factors Psychology from Wright State University in 2009.
Katia Sycara is the Edward Fredkin Research Professor in Robotics at Carnegie Mellon University. She earned her PhD in Computer Science from Georgia Institute of Technology in 1987 and holds a Doctorate Honoris Causa from the University of the Aegean.